38280 str019 (3)
metod szacowaniu logo kryterium w nnwiijni ji ' i............. temln odnosi ttirmln dostępność
do cuch probabilistycznych procosu pracy systemu 1'milnw.i iioputernlo dostępna literatura nawigacyjna nie zawiera tego typu wyprowadzania zasadnym bytu zaprezentowanie, nawet w ograniczonej formie, rńwnlo Interesującego • g •< >|i • *iu.i na Ittunln dostępności systemu judnnkże w ujęciu teorii niezawodności.
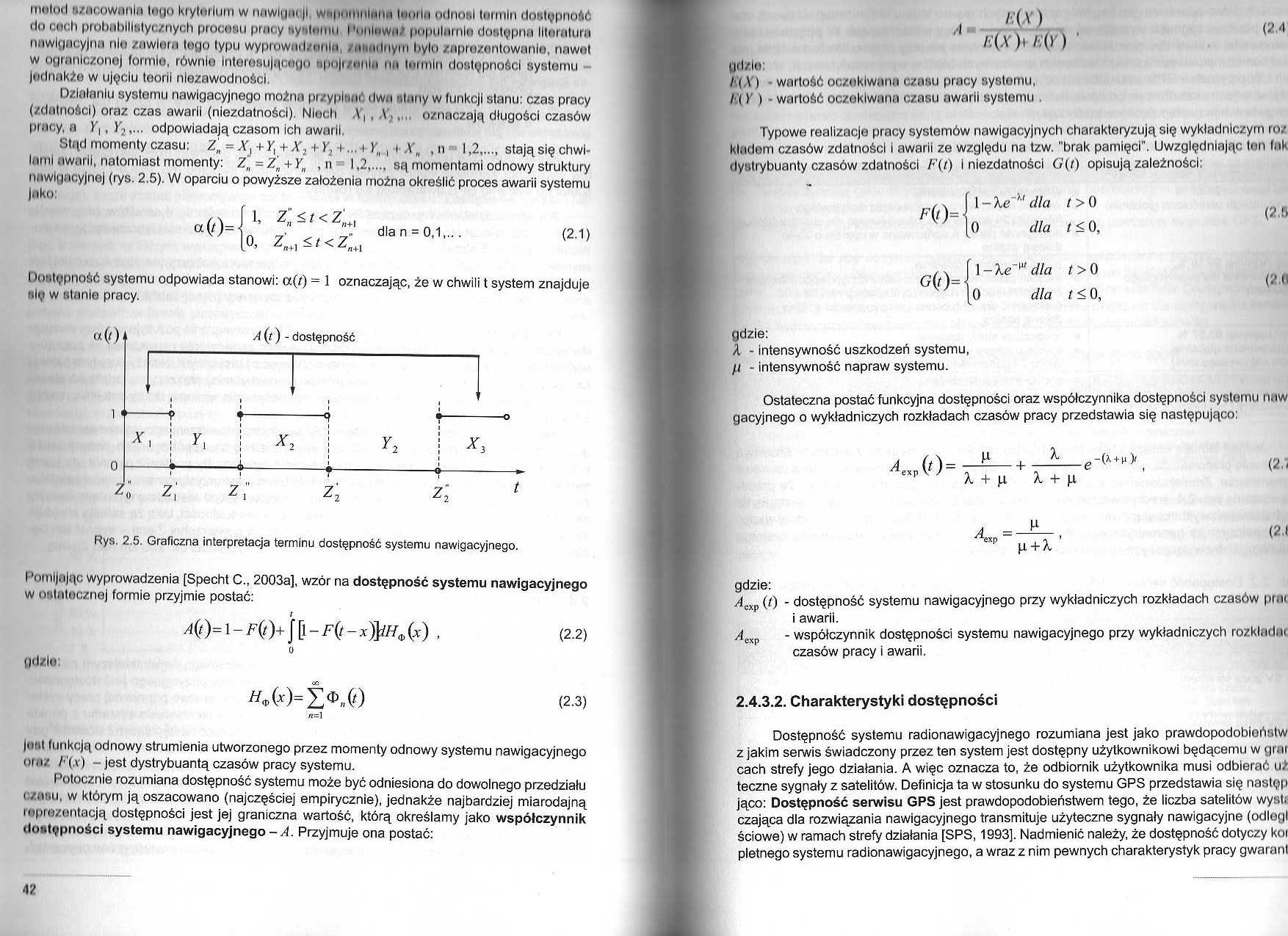
Działaniu systemu nawigacyjnego możno przypinać dwa ulany w funkcji stanu: czas pracy (zdolności) oraz czas awarii (niezdatności). Niech \, , \., oznaczają długości czasów pracy, a K|, y2odpowiadają czasom ich awarii.
Stąd momenty czasu: Z’ = X. +Y, + X2 + Y2 +... + Yn i .V„ , n 1,2,..., stają się chwilami nwnrll, natomiast momenty: Z’ = Z„ + , n 1,2,..., są momentami odnowy struktury
nawigacyjnej (rys. 2.5). W oparciu o powyższe założenia można określić proces awarii systemu jako:
«(0=-
dla n = 0,1,...
(2.1)
1, Zn <t c Zn+t
Z/i+i -1 < Zn+\
I Jntilępność systemu odpowiada stanowi: a(t) = 1 oznaczając, że w chwili t system znajduje się w stanie pracy.
<*(/)
A (t) - dostępność
|
-? ! r. i |
< r -< fS |
|
r |
1 1 7 7 z, , Z,2 |
*3
Rys. 2.5. Graficzna interpretacja terminu dostępność systemu nawigacyjnego.
I 'omijając wyprowadzenia [Specht C., 2003a], wzór na dostępność systemu nawigacyjnego w ostatecznej formie przyjmie postać:
. (2-2)
0
l)dz !o:
ort
(2.3)
/ł=l
|u«l lunkcją odnowy strumienia utworzonego przez momenty odnowy systemu nawigacyjnego oraz /' (a ) - jest dystrybuantą czasów pracy systemu.
Potocznie rozumiana dostępność systemu może być odniesiona do dowolnego przedziału czasu, w którym ją oszacowano (najczęściej empirycznie), jednakże najbardziej miarodajną mprozontacją dostępności jest jej graniczna wartość, którą określamy jako współczynnik dostępności systemu nawigacyjnego-^. Przyjmuje ona postać:
A
(i"t
gdzlo:
/■ < .V) wartość oczoklwnnn czasu pracy systemu,
/ (>' ) wartość oczoklwnnn czasu awarii systemu .
Typowe realizacjo pracy systemów nawigacyjnych charakteryzują się wykładniczym roz kładom czasów zdatnoścl 1 awarii ze względu na tzw. "brak pamięci". Uwzględniając ton lal. dystrybuanty czasów zdatnoścl l'\t) i niezdatności G(t) opisują zależności:
F(l)=
f \-Xe~u dla ] 0 dla
/ > 0
/<0,

1 -\e* dla 0 dla
(V (1
gdzie:
A - intensywność uszkodzeń systemu, fi - intensywność napraw systemu.
Ostateczna postać funkcyjna dostępności oraz współczynnika dostępności syci nr nu naw gacyjnego o wykładniczych rozkładach czasów pracy przedstawia się następująco:
(2.3
A, + jd A + |x
gdzie:
/)CXp (/) - dostępność systemu nawigacyjnego przy wykładniczych rozkładach czasów prar i awarii.
/)cxp - współczynnik dostępności systemu nawigacyjnego przy wykładniczych rozkład, u czasów pracy i awarii.
2.4.3.2. Charakterystyki dostępności
Dostępność systemu radionawigacyjnego rozumiana jest jako prawdopodobieństw z jakim serwis świadczony przez ten system jest dostępny użytkownikowi będącemu w grnr cach strefy jego działania. A więc oznacza to, że odbiornik użytkownika musi odbierać uż teczne sygnały z satelitów. Definicja ta w stosunku do systemu GPS przedstawia się następ jąco: Dostępność serwisu GPS jest prawdopodobieństwem tego, że liczba satelitów wystr czająca dla rozwiązania nawigacyjnego transmituje użyteczne sygnały nawigacyjne (odłogi ściowe) w ramach strefy działania [SPS, 1993]. Nadmienić należy, że dostępność dotyczy koi pletnego systemu radionawigacyjnego, a wraz z nim pewnych charakterystyk pracy gwarant
Wyszukiwarka
Podobne podstrony:
Porównanie klasycznych metod szacowania niskocy-kłowej trwałości... Wartości skumulowanego
SPIS TREŚCI CONTENTS Michał Burak, Dariusz Skibicki Porównanie klasycznych metod szacowania
Porównanie klasycznych metod szacowania niskocyklowej trwałości... £a = gf Egm (2Nf)b + E f(2Nf)c
Porównanie klasycznych metod szacowania niskocyklowej trwałości... Tabela 1. Podstawowe właściwości
P1280007 18. Która z poniższych metod szacowania rzetelności nosu dotyczy błędu
Przemysłowe Systemy Automatyki - 1 Ji. ma swojej drodze zawór Z do równoważenia instalacji
19 Wykorzystanie metod ELECTRE... Jak można zayważyć wartość z wyraża stosunek wagi najwyższej do wa
Kryterium podziału Podział wcdłue stosunku środka przewozu do drogi
yVow>ji^2*~aWi ^Oi)opcKłł^vvix do ołJ X tv^ oJ^KU^ap^ wYS^ ę£ i. y*ST/2-1*łS IsKe^ dwie/
Jakie są kryteria i wymagania żeby koszty prac rozwojowych zaliczyć do wartości niematerialnych i
gleby364 ji i bardzo ch frakcji należą do kompleksu >okości, za-lościowych. as
58249 skanuj0004 Jeszcze innym kryterium podziału kursów walutowych jest ich stosunek do inflacji. J
dalejbracia stawa: Rajnold Suchodolski Żywo /......i* 1
1. Struktura systemu finansowego Podstawowym kryterium dzielącym oba rynki jest liczba odbiorców, do
dalejbracia stawa: Rajnold Suchodolski Żywo /......i* 1
więcej podobnych podstron