46626 str159
>iu> do nawigacyjnych < och wykot/ytUiiiil.i nilliii>mil"i .'wiązanych m atoiowimym oblnktnm logo pod»lawową funkcją jost bieżąca pro/nnlw |u smini/nnych lub wyliczonych parametrów uchu. WlękBzość odbiorników przedstawia omawiane lu pnitnnelry w zbliżony Bposób. Poja-ylnjąca się różnico wynikają jedynie ze specyficznego nnzownlctwa związanego z rodzajem iprnwnlnnej nawigacji. Każdy z odbiorników poriimln l/w „ekran pozycyjny”, na którym przed-ilnwlono są minimum cztery podstawowe parametry ruchu, takie jak:
róża kompasowa kreska kursowa
prędkość
ruchu
kurs _
rzeczywisty
|
im 255 Im |
| I I llllll MII W 285 ftOO i l i i i i I i i i/Nl i ii a |
| y\ 111 mit MW 330 '\ II i 1 1 l l l l |
|
TRACK SP^ED^ |
TRIP | |
|
289° 2.2 r |
o.o: | |
|
POSITION N 40 51.309’ |
ALT 45 ft * | |
|
W 073" 39.235’ |
15:36:45 | |
wysokość
współrzędne pozycji bieżącej
czas lokalny
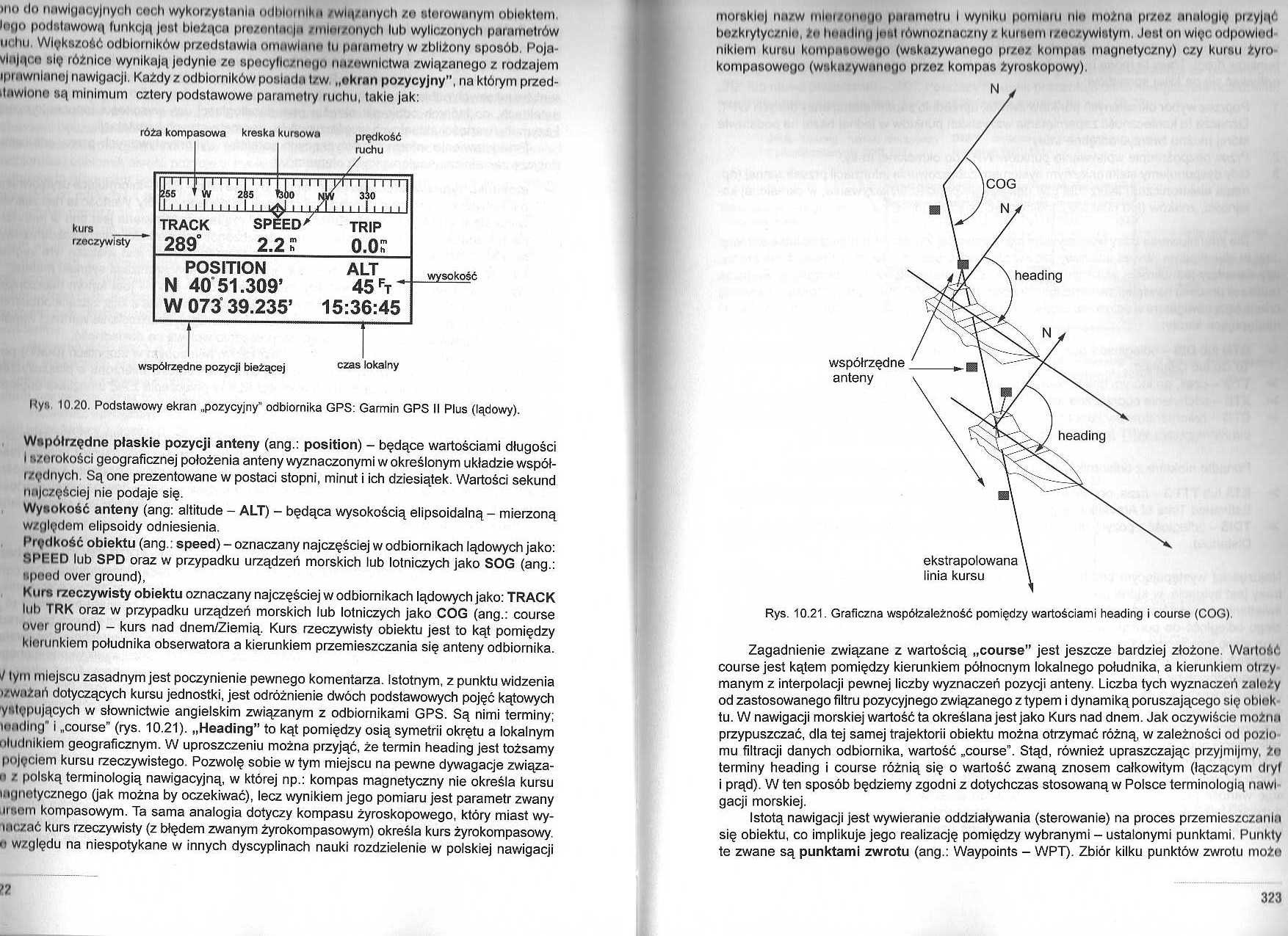
Iłyn 10.20. Podstawowy ekran „pozycyjny” odbiornika GPS: Garmin GPS li Plus (lądowy).
Wttpółrzędne płaskie pozycji anteny (ang.: position) - będące wartościami długości i ti/orokości geograficznej położenia anteny wyznaczonymi w określonym układzie współ-rzędnych. Są one prezentowane w postaci stopni, minut i ich dziesiątek. Wartości sekund najczęściej nie podaje się.
Wysokość anteny (ang: altitude - ALT) - będąca wysokością elipsoidalną - mierzoną względem elipsoidy odniesienia.
Prędkość obiektu (ang.: speed) - oznaczany najczęściej w odbiornikach lądowych jako: SPEED lub SPD oraz w przypadku urządzeń morskich lub lotniczych jako SOG (ang.: tipeod over ground),
Kurs rzeczywisty obiektu oznaczany najczęściej w odbiornikach lądowych jako: TRACK lut) TRK oraz w przypadku urządzeń morskich lub lotniczych jako COG (ang.: course ovnr ground) - kurs nad dnem/Ziemią. Kurs rzeczywisty obiektu jest to kąt pomiędzy kierunkiem południka obserwatora a kierunkiem przemieszczania się anteny odbiornika.
J tym miejscu zasadnym jest poczynienie pewnego komentarza. Istotnym, z punktu widzenia i/wnżań dotyczących kursu jednostki, jest odróżnienie dwóch podstawowych pojęć kątowych ynlępujących w słownictwie angielskim związanym z odbiornikami GPS. Są nimi terminy; londlng" i „course” (rys. 10.21). „Heading” to kąt pomiędzy osią symetrii okrętu a lokalnym uludnlklem geograficznym. W uproszczeniu można przyjąć, że termin heading jest tożsamy pojęciem kursu rzeczywistego. Pozwolę sobie w tym miejscu na pewne dywagacje związali z polską terminologią nawigacyjną, w której np.: kompas magnetyczny nie określa kursu Hipnotycznego (jak można by oczekiwać), lecz wynikiem jego pomiaru jest parametr zwany linom kompasowym. Ta sama analogia dotyczy kompasu żyroskopowego, który miast wy-mczać kurs rzeczywisty (z błędem zwanym żyrokompasowym) określa kurs żyrokompasowy. n względu na niespotykane w innych dyscyplinach nauki rozdzielenie w polskiej nawigacji n
mornklo| nn/w mlni/on«U" pwnmotru i wyniku pomlwu nl<> moimi przo/ nnaloglę |n/y|i|' bozkrytycznle, tu hmnllnu I""1 równoznaczny z kumam rzuczywlatym. Jeut on więc odpowlod niklom kursu kompnłowngo (wskn/ywanego przo/ kompas magnetyczny) czy kursu żyro-kompasowogo (wskazywanego przez kompas żyroskopowy).
współrzędne
anteny
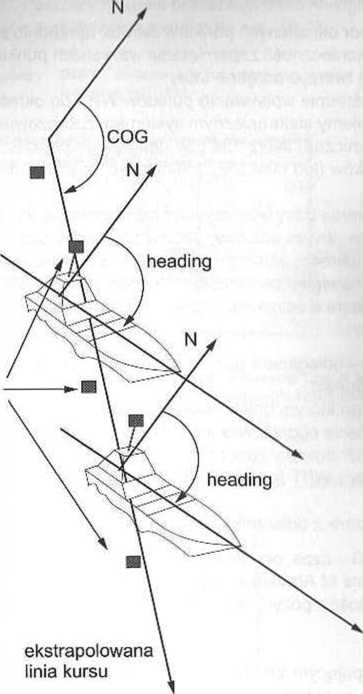
Rys. 10.21. Graficzna współzależność pomiędzy wartościami heading i course (COG).
Zagadnienie związane z wartością „course” jest jeszcze bardziej złożone. Wartość course jest kątem pomiędzy kierunkiem północnym lokalnego południka, a kierunkiem otrzymanym z interpolacji pewnej liczby wyznaczeń pozycji anteny. Liczba tych wyznaczeń założy od zastosowanego filtru pozycyjnego związanego z typem i dynamiką poruszającego się obłok tu. W nawigacji morskiej wartość ta określana jest jako Kurs nad dnem. Jak oczywiście można przypuszczać, dla tej samej trajektorii obiektu można otrzymać różną, w zależności od pozlo mu filtracji danych odbiornika, wartość „course”. Stąd, również upraszczając przyjmijmy, żn terminy heading i course różnią się o wartość zwaną znosem całkowitym (łączącym diyt i prąd). W ten sposób będziemy zgodni z dotychczas stosowaną w Polsce terminologią nawl gacji morskiej.
Istotą nawigacji jest wywieranie oddziaływania (sterowanie) na proces przemieszczania się obiektu, co implikuje jego realizację pomiędzy wybranymi - ustalonymi punktami. Punkty te zwane są punktami zwrotu (ang.: Waypoints - WPT). Zbiór kilku punktów zwrotu może
323
Wyszukiwarka
Podobne podstrony:
kolibry w kwiatach (3) © © ;©iu # # # O O U #### DO->^^^OOtf ^###000000# te###000##>P i*:£^###
CRUCS i ZZENN. Już w 1990 roku próbowano wykorzystać sieci neuronowe w systemach hipertekstowych do
str046 (3) Odnotowania wymaga, że w przeciwieństwie do nawigacyjnych systemów fazowych, w których po
DSC00055 (12) imn i narwttlui iU* t • W * i «* S f 1. Do Utoowyc
72139 Image (28) Opcja (ekonomia)fa.ko.o% (edytuj)Z Wildpedii Skocz do: nawigacji, szukaj Opcja jest
DSC05830 (4) iu do naczyń, spływa do zatok, oplukuje narządy r osierdziowej, a następnie F
pokonania tych barier. Firmy na swoich łatwych do nawigacji stronach internetowych powinny publikowa
MapaMap TopSD 7 6 2 ( Mapa 13 Q2 ) MapaMap top sd Oprogramowanie do nawigacji GPS
Kurs: Algorytmy Nawigacji Robotów Mobilnych Temat 1Wprowadzenie do nawigacji robotów mobilnych Dariu
Algorytmy Nawigacji Robotów Mobilnych: Wprowadzenie do nawigacji robotów mobilnych które mają bardzo
Algorytmy Nawigacji Robotów Mobilnych: Wprowadzenie do nawigacji robotów mobilnych Realizacja zadani
Algorytmy Nawigacji Robotów Mobilnych: Wprowadzenie do nawigacji robotów mobilnych i szczegółowości
Algorytmy Nawigacji Robotów Mobilnych: Wprowadzenie do nawigacji robotów mobilnych Pierwsza grupa
Panel 7 j ‘£» Programy do Nawigacji¥ > •••• ^ O :<f O) (U
więcej podobnych podstron