58233 P1050576
2
j||§§
2
cpii
Wprowadzenie
Większość obiektów spotkanych ,aii równaniem różniczkowym postaci
w liniowych układach automatycznej regulacji
można
d'y{t)
dl”
dr'
-La0y(t)=bm
Ml jI .+60zr(/j
o'/" m_l
J«ali spełnione są następujące warunki: aj obiekty w układzie sterowania są liniowe, y sygnały podawane są przy zerowych warunkach początkowych, c) sygnały wejściowe spełniają warunki dla istnienia transformaty Laplace a ^ ..
wówczas równanie powyższe, poddane obustronnemu przekształceniu Laplace a przy postać
X a„s”Y(s)+a^ j"1 Y(s)+...+c0Y(s)=bmsmU(s)+... +baU(s) stąd
Y(s) bm sm +bm_lsm~' + ...+bls+b0
U(s) an s"+all_I s”~'+...+as, +aQ T
Siosunek transformaty sygnału wyjścia do transformaty wejścia nazywamy transmitancją Operatorową układu i oznaczamy jako G(s)
G(s)=
m
m
7'rausmitancja widmowa
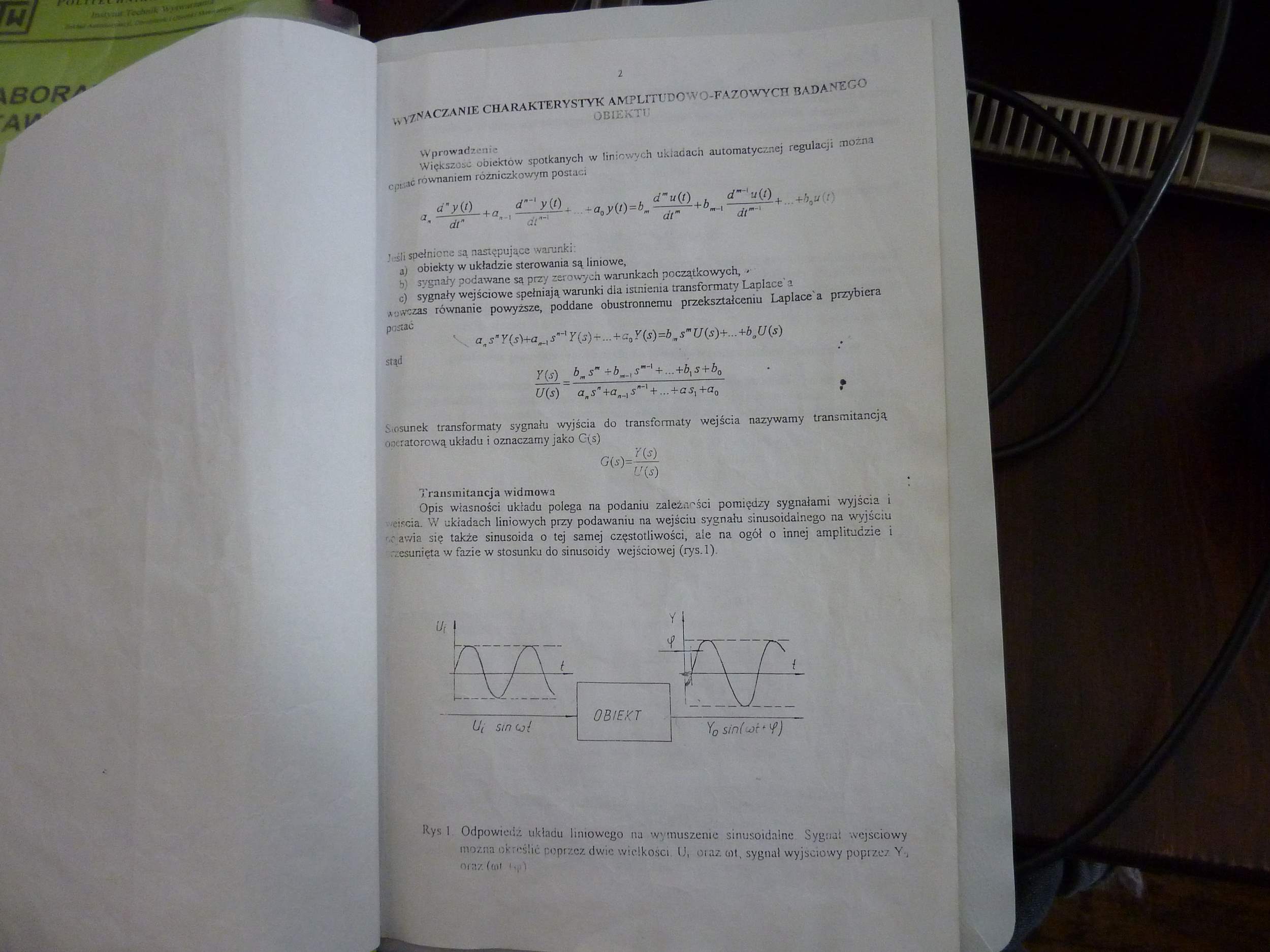
Opis własności układu polega na podaniu zależności pomiędzy sygnałami wyjścia i liścia. W układach liniowych przy podawaniu na wejściu sygnału sinusoidalnego na wyjściu r«f awia się także sinusoida o tej samej częstotliwości, ale na ogół o innej amplitudzie i rzesunięta w fazie w stosunku do sinusoidy wejściowej (rys. 1).
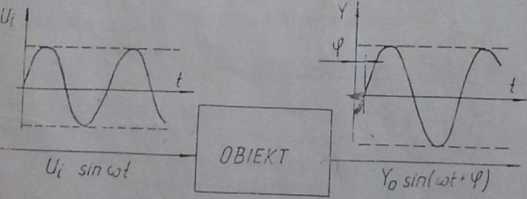
RVS ' moZPr!f2-rlt,adU lini0WC80 I wyduszenie sinusoidalne Sygnał wejściowy « POpra“ dWi° Widk0iCI' I il U wyjściowy poprzez Y,
Wyszukiwarka
Podobne podstrony:
P1050576 2j
P1050576 2j
22631 Wprowadzenie do MatLab (81) 6.4. Rozwiązywanie równań różniczkowych zwyczajnych Rozwiązywanie
39724 P1050571 2 vCZAlvre CHARAKTERYSTYK AMPLITUDOWO-FAZOWYCH BADANEGO OBIEKTU W pro widie® ic Więks
skanuj0102 (3) cU,sj^ Oj CA‘ T2011-10-17 NMR w WPROWADZENIE Większość cząsteczek organicznych
SNC00326 WPROWADZENIE Otarta w Obiekt S71S Obiekt S791 Obiekt 5811 Obiekt 5831 Obiekt
img016 16 1. Wprowadzenie nych obiektach - co także bywa wykorzystywane w praktyce jako uboczny efek
Wprowadzenie Programy obiektowe 3D Programy tej klasy zostały stworzone jako narzędzie do szybkiej
skanuj0040 stans między stresorem a osobą, co pozwala na większą obiektywizację oceny rzeczywistego
johny mapka t POŁUDNIE GWIAZDOZBIÓR: PAS ORIONA +-WIĘKSZY OBIEKT • -MNIEJSZY OBIEKTJohimy Anonymous
Synteza Octan amylu S-lS-1SYNTEZA OCTANU n-AMYLU (opracowała Jadwiga Laska) Wprowadzenie Większość
IdbI schenkerZakładka „Dane dot. Wagonów Wprowadzanie większej liczby wagonów Jeśli w polu
DHTML0088 Marginesy i obramowania W świecie rzeczywistym atomy są elementami, z których zbudowane są
więcej podobnych podstron