67430 P1080234
4. Wprowadzenie do kinematyki robotów
Ograniczenia dotyczą sposobu realizacji ruchu, a konkretnie prędkości, nie zmniejszają jej wymiaru, ale są nieusuwalne. Opisują one, po jakich prostych i krzywych może poruszać się robot, który ma określoną orientację. Ograniczę-nia te są nazywane nieholonomicznymi i dotyczą większości klas robotów mobilnych. Ograniczenia takie modeluje się jako układ, wyprowadzany z analitycznego zapisu ograniczeń ruchu robota.
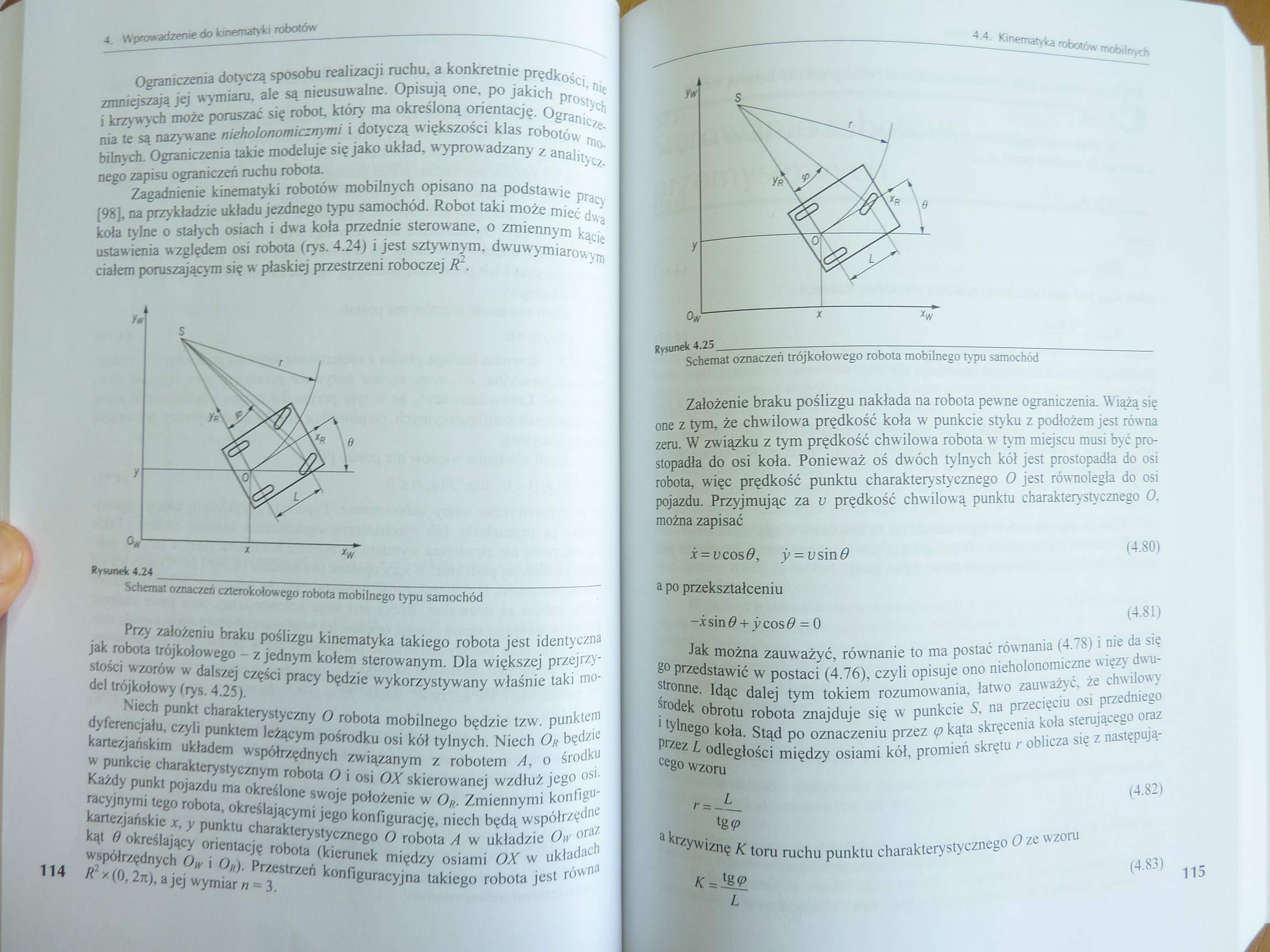
Zagadnienie kinematyki robotów mobilnych opisano na podstawie pracy [98], na przykładzie układu jezdnego typu samochód. Robot taki może mieć dwa koła tylne o stałych osiach i dwa koła przednie sterowane, o zmiennym kącie ustawienia względem osi robota (rys. 4.24) i jest sztywnym, dwuwymiarowym ciałem poruszającym się w płaskiej przestrzeni roboczej R2.
Rysunek 4.24 Jt. \ _
Schemat oznaczeń czterokołowego robota mobilnego typu samochód
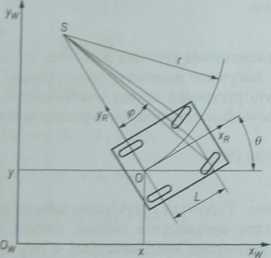
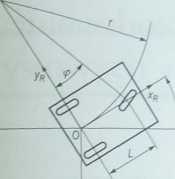
Przy założeniu braku poślizgu kinematyka takiego robota jest identyczna jak robota trójkołowego - z jednym kołem sterowanym. Dla większej przejrzystości wzorów w dalszej części pracy będzie wykorzystywany właśnie taki model trójkołowy (rys. 4.25).
Niech punkt charakterystyczny O robota mobilnego będzie tzw. punktem dyferencjału, czyli punktem leżącym pośrodku osi kół tylnych. Niech Or będzie kartezjańskim układem współrzędnych związanym z robotem A, o środku w punkcie charakterystycznym robota O i osi OX skierowanej wzdłuż jego osi. Każdy punkt pojazdu ma określone swoje położenie w Or. Zmiennymi konfiguracyjnymi tego robota, określającymi jego konfigurację, niech będą współrzędne kartezjańskie jc, y punktu charakterystycznego O robota A w układzie Ow oraz kąt 0 określający orientację robota (kierunek między osiami OX w układach współrzędnych Ow i Or). Przestrzeń konfiguracyjna takiego robota jest równa 114 J?2x(0,2n), a jej wymiar n = 3.
robotów


S
e
y
Rysunek 4.25
Schemat oznaczeń trykotowego robota mobilnego typu samochód
Założenie braku poślizgu nakłada na robota pewne ograniczenia. Wiążą się one z tym, że chwilowa prędkość koła w punkcie styku z podłożem jest równa zeru. W związku z tym prędkość chwilowa robota w tym miejscu musi być prostopadła do osi koła. Ponieważ oś dwóch tylnych kół jest prostopadła do osi robota, więc prędkość punktu charakterystycznego O jest równoległa do osi pojazdu. Przyjmując za u prędkość chwilową punktu charakterystycznego 0. można zapisać
(4.80)
(4.81)
x = vcos0, y—v sin#
a po przekształceniu
-isin 9+y cos 6 = 0
Jak można zauważyć, równanie to ma postać równania (4.78) i nie da się go przedstawić w postaci (4.76), czyli opisuje ono nieholonomiczne więzy dwustronne. Idąc dalej tym tokiem rozumowania, łatwo zauważyć, że chwilowy środek obrotu robota znajduje się w punkcie S, na przecięciu osi przedniego i tylnego koła. Stąd po oznaczeniu przez ę kąta skręcenia koła stemjącego oraz przez L odległości między osiami kół, promień skrętu r oblicza się z następującego wzoru
tg <P
(4.82)
a krzywiznę K toru ruchu punktu charakterystycznego O ze wzoru
(4.83)
115
Wyszukiwarka
Podobne podstrony:
P1080222 4. Wprowadzenie do kinematyki robotów dalej przykłady będą częściej dotyczyć tej konfigurac
72842 P1080233 4. Wprowadzenie do kinematyki robotów wtedy 4. Wprowadzenie do kinematyki robotów c &
więcej podobnych podstron