73945 test1 2 (2)

28. Programowanie robotów jest problemem:
a) trudnym, choć uniwersalny język znacznie upraszcza ten problem;
b) łatwym i daje się do rozwiązać na szybkim komputerze PC;
X bardzo rozbudowanym, ponieważ dla różnych typów robotów wykorzystuje się różne metody programowania;
d) nie wymagającym specjalnego oprogramowania.
29. Która z wymienionych wielkości nie jest wielkością kinematyczną:
natężenie pola;
b) droga;
c) prędkość;
d) przyspieszenie.
30. Obiekty w środowisku Cosimir to:
a) komponenty, które tworzą graficzny obraz sekcji;
b) sekcje posiadające jeden stopień swobody;
c) najniżej sklasyfikowane elementy struktury projektu;
*3 najwyżej sklasyfikowane elementy struktury projektu.
18. Które z wymagań jest wymaganiem głównym stawianym chwytakom:
a) mała waga, aby minimalizować statyczne i dynamiczne naprężenia robota;
b) małe rozmiary, aby minimalizować przestrzeń roboczą wymaganą dla chwytaków; możliwość chwytania wszystkich obiektów bez względu na ich właściwości;
d) zdefiniowane siły chwytania.
19. Który z poniższych czynników nie ma wpływu na uchwycenie obiektu:
a) właściwości obiektu manipulacji;
b) właściwości chwytne chwytaka;
c) błąd wzajemnego ustawienia obiektu i chwytaka; wszystkie powyższe mają.
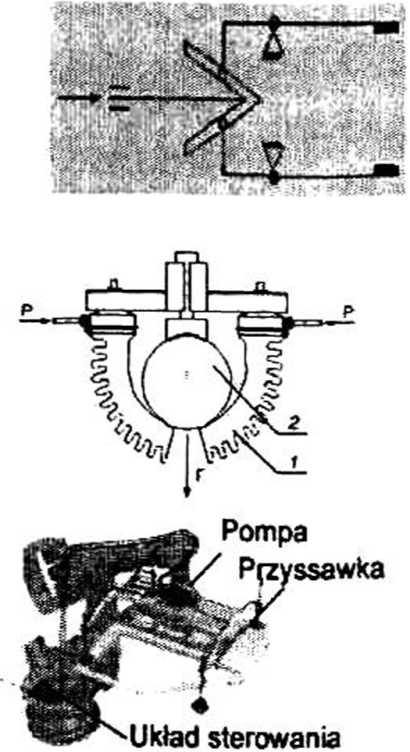
20. Chwytak na rysunku ma napęd:
a) klinowy;
X linowy;
c) dźwigniowy;
d) zębaty.
21. Chwytak na rysunku jest chwytakiem z końcówkami:
elastycznymi;
b) sprężystymi;
c) przyzsawkowymi;
d) sztywnymi.
22. Układ na rysunku jest układem:
częściowo zdecentralizowanym;
b) w pełni zdecentralizowanym;
c) scentralizowanym;
d) żadne z powyższych.
23. Wśród języków normy EEC-1131-3 do programowania sterowników PLC nie ma:
"V języka Melfa-Basic IV;
b) języka drabinkowego;
c) języka bloków funkcyjnych;
d) listy instrukcji.
24. Do etapów tworzenia komórki roboczej w środowisku Cosimir można zaliczyć:
M wszystkie poniższe;
b) projektowanie;
c) programowanie;
d) wprowadzanie poprawek.
25. Do zalet programowania ręcznego nie można zaliczyć:
a) krótkiego czasu programowania;
b) braku konieczności posiadania specjalistycznego komputera; elastyczności i funkcjonalności;
d) wszystkie powyższe są zaletami tego typu programowania.
26. Robot posiadający 6 osi typu obrotowego jest robotem o:
a) 3-ch stopniach swobody;
b) 4-ch stopniach swobody;
c) 5-ciu stopniach swobody;
X 6-ciu stopniach swobody.
27. Metodą programowania robotów nie jest:
a) metoda teach-in;
b) metoda master-slave;
c) metoda manuał;
* metoda perfect.
Wyszukiwarka
Podobne podstrony:
test1 2 (2) 28. Programowanie robotów jest problemem: a) trudnym
1.3.KLASYFIKACJE ZABAW Klasyfikacja zabaw jest problemem trudnym, ponieważ zmienna jest zarówno treś
Na początku jest problem... ■ Istniejące programy komputerowe są
Na początku jest problem... ■ Tworzone są również programy do zadań, które można wykonać za pomocą j
2 Postać bazowa problemu programowania liniowego Definicja 9 Mówimy, że problem (l)-(3) jest problem
P1050313 M. W. Arapow 146 iiiułowanie, że struktura podlega prawu Zipfa. Problem ten jest techniczni
1_Projektowanie i analiza algorytmów Stworzenie programu rozwiązującego konkretny problem jest proce
1956 - programowanie kwadratowe Wiele problemów optymalizacyjnych jest formułowanych w postaci model
języków programowania. Wielkość tego problemu zależy od złożoności pojęcia. Gorzej jest ze
Programowanie liniowe Programowanie liniowe jest to sformułowanie problemu decyzyjnego w postaci zad
1. OPIS PROGRAMU ZDROWOTNEGO 1.1 Opis Problemu Zdrowotnego Niepełnosprawność jest jednym z poważniej
skanuj0019 28 CO TO JEST FILOZOFIA? Pytania filozoficzne: Dlaczego jest coś, a nie raczę) nic? Co to
Image2 Packet-snifTer - jest to program, który jest uruchomiony na jakieś maszynie w sieci i "p
Program adresowany jest do dzieci z klas 1-3 uczęszczających do świetlicy, z różnymi zaburzeniami za
skanuj0192 28 1. Co to jest strategia i zarządzanie strategiczne - Tablica 1.2 - D
więcej podobnych podstron