78536 Untitled Scanned 77
1
- 156 -
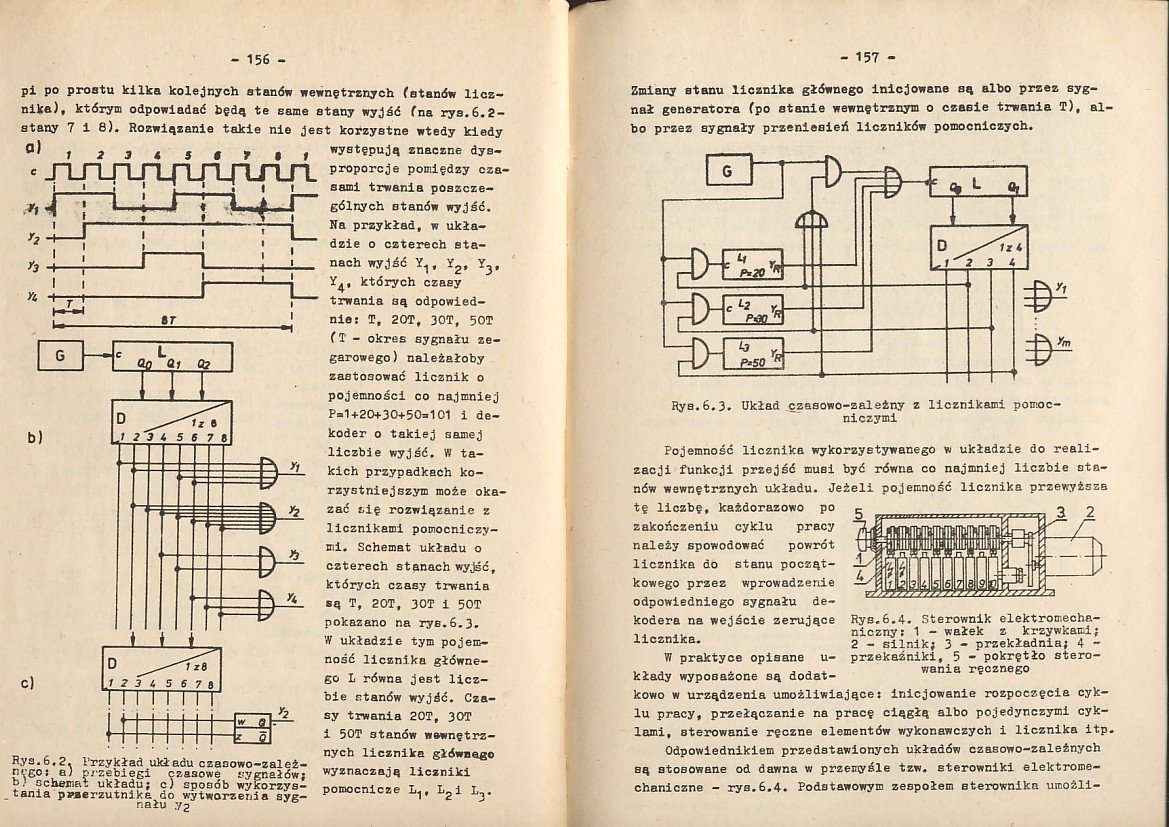
pi po proatu kilka kolejnych stanów wewnętrznych (stanów licznika)* którym odpowiadać będą te same etany wyjść (na rys. 6.2-etany 7 i 8). Rozwiązanie takie nie jest korzystne wtedy kiedy
1 2 3 1 5 $ T 9 1
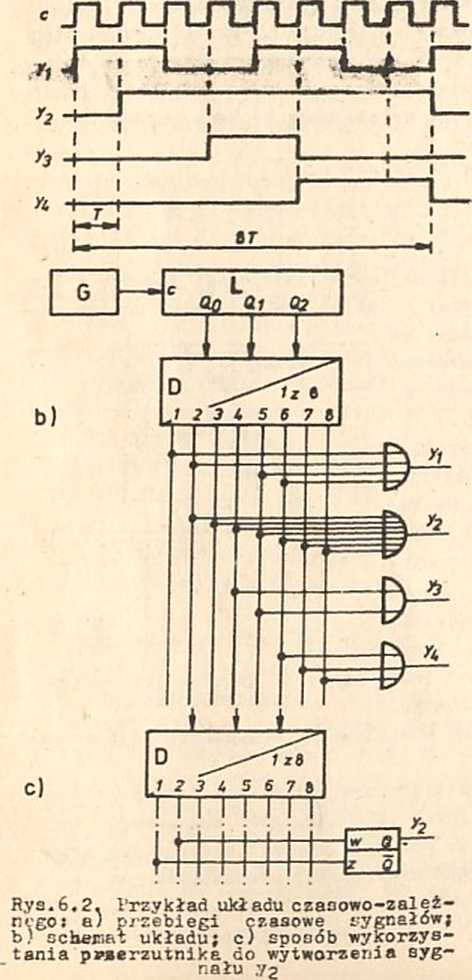
występują znaczne dysproporcje pomiędzy czasami trwania poszczególnych stanów wyjść.
Na przykład, w układzie o czterech stanach wyjść Y1, Y2, Y3, Y^, których czasy trwania są odpowiednie: T, 2OT, 30T, 50T (T - okres sygnału zegarowego) należałoby zastosować licznik o pojemności co najmniej P=1+20+30+50=101 i dekoder o takiej samej liczbje wyjść. W takich przypadkach korzystniejszym może okazać się rozwiązanie z licznikami pomocniczymi. Schemat układu o czterech stanach wyjść, których czasy trwania są T, 2OT, 30T i 50T pokazano na rys.6.3.
W układzie tym pojemność licznika głównego L równa jest liczbie stanów wyjść. Czasy trwania 20T, 30T i 50T stanów wewnętrznych licznika głównego wyznaczają liczniki pomocnicze L1# l>2 i L^.
Zmiany stanu licznika głównego inicjowane Bą albo przez sygnał generatora (po atanie wewnętrznym o czaeie trwania T), albo przez sygnały przeniesień liczników pomocniczych.
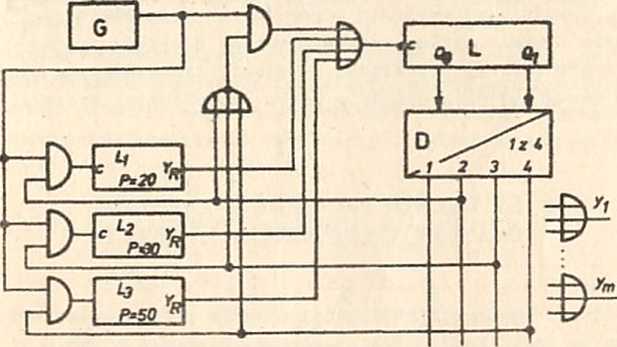
Rys.6.3. Układ czasowo-zależny z licznikami pomocniczymi
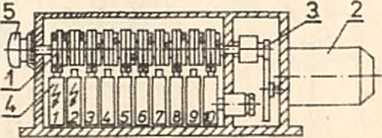
Rys.6.4. Sterownik elektromechaniczny: 1 - wałek z krzywkami; 2 - silnik; 3 - przekładnia; 4 -przekaźniki, 5 - pokrętło sterowania ręcznego
Pojemność licznika wykorzystywanego w układzie do realizacji funkcji przejść musi być równa co najmniej liczbie stanów wewnętrznych układu. Jeżeli pojemność licznika przewyższa tę liczbę, każdorazowo po zakończeniu cyklu pracy należy spowodować powrót licznika do stanu początkowego przez wprowadzenie odpowiedniego sygnału dekodera na wejście zerujące licznika.
W praktyce opisane u-kłady wyposażone są dodatkowo w urządzenia umożliwiające: inicjowanie rozpoczęcia cyklu pracy, przełączanie na pracę ciągłą albo pojedynczymi cyklami, sterowanie ręczne elementów wykonawczych i licznika itp.
Odpowiednikiem przedstawionych układów czasowo-zależnych są stosowane od dawna w przemyśle tzw. sterowniki elektromechaniczne - rys.6.4. Podstawowym zespołem Bterownika umożli-
Wyszukiwarka
Podobne podstrony:
Untitled Scanned 12 i v flylykuy-*L, pi-oL^L ^-^- <• oU-^!i,/v^y &■ 5^*^^ ~
Untitled Scanned 77 Posługiwanie się częściami mowy C 2.1.31 Czasowniki jako nazwy czynności. Czas p
Untitled Scanned 77 (2) 80 STEREOMETR BRYŁY OBROTOWE walec, stożek, kula 541. Ołowiany walec o promi
18694 Untitled Scanned 09 (20) Sztuk Pięknych rysujące dziewczęta zrywają się przerażone. W pełnym p
Untitled Scanned 27 IV. TEST Zaznacz, czy poniższe zdanie jest prawdziwe (P), czy też fałszywe (F),
Untitled Scanned 02 (4) 0,467, i o,455 MJ/dzień przy 50, 80 i 100 kg masy ciała świni. Wartości te m
Untitled Scanned 04 Część Korowa Część rdzenna zewnętrzna Część rdzenna wewnętrzna //włosowate
Untitled Scanned 28 4*r IV. TEST Zaznacz, czy poniższe zdanie jest prawdziwe (P), czy też fałszywe (
Untitled Scanned 22 »o Problemy poetyki Dottojeutbe^o nych; wic, żc nawet ci. przed którymi tak się
więcej podobnych podstron