83577 skanuj0022 (136)
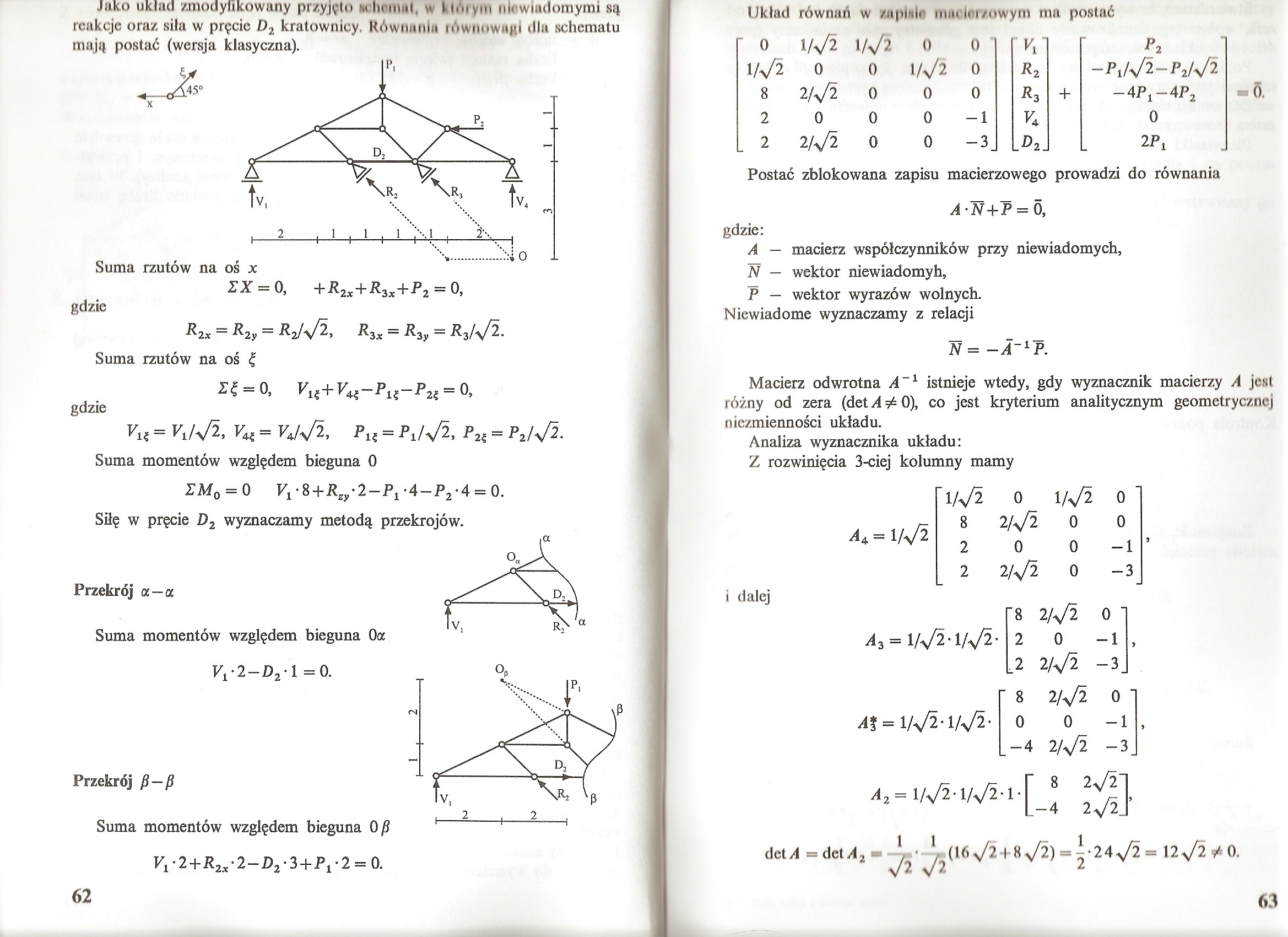
Jako układ zmodyfikowany przyjęto Nchnnmi. w M 6 ryj u niewiadomymi są reakcje oraz siła w pręcie D2 kratownicy. Równaniu równowagi dla schematu mają postać (wersja klasyczna).

ZX — Ot R.2X-t-R$x-ł-P 2 — 0,
gdzie
R2x — R2y = P$x = P$y — P3/V^*
Suma rzutów na oś £
gdzie
2^ = 0, Fu+F4*-P1?-P24 = 0,
Vu = VJy/i, vt( = mM -Pu = pi/\/2. p2t = Pi/yfe-Suma momentów względem bieguna 0
IM0 = 0 Fx -8 +Rzy-2-Pt -4—P2*4 = 0.
Siłę w pręcie D2 wyznaczamy metodą przekrojów.

Przekrój a—a
Suma momentów względem bieguna 0a Vł-2-D2-1 = 0.
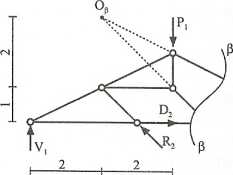
Przekrój fi—fi
Suma momentów względem bieguna 0/? F1-2+P2;c-2-2)2-3+P1-2 = 0.
Układ równań w zapluta uwuitar/owym ma postać
|
0 \/<Jl 1 Isfl 0 0 * |
’ V |
p2 | ||
|
iA/2 o o ify/i o |
r2 |
-PJ^l-PJ+J2 | ||
|
o o 0 1 oo |
Rs |
+ |
— 4Pl—4P2 | |
|
2 0 0 0 -1 |
v4 |
0 | ||
|
2 2/y/l 0 0 -3. |
d2. |
2Pi |
Postać zblokowana zapisu macierzowego prowadzi do równania
A-N+P = Ó,
gdzie:
A — macierz współczynników przy niewiadomych,
N — wektor niewiadomyh,
P — wektor wyrazów wolnych.
Niewiadome wyznaczamy z relacji
Ń= -i"1?.
Macierz odwrotna A"1 istnieje wtedy, gdy wyznacznik macierzy A jest różny od zera (det A # 0), co jest kryterium analitycznym geometrycznej niezmienności układu.
Analiza wyznacznika układu:
Z rozwinięcia 3-ciej kolumny mamy
|
'i/0 |
0 |
WS |
0 | |
|
= 1/0 |
8 2/<y/2 2 0 |
0 0 |
0 -1 | |
|
2 2/0 |
0 |
-3 | ||
|
'8 |
2/V2 |
0 ' | ||
|
2 |
0 |
-1 , | ||
|
,2 |
2A/2 |
-3. | ||
|
8 |
2/^2 |
0 ‘ | ||
|
A% = 1/0 |
•1/01 |
0 |
0 |
-1 |
|
—4 |
2/V2 |
-3. | ||
det^ = dcti42 - ■^•4-(16n/2+8>/2) » ^*24^/2 « 12>/2 ^ 0.
63
Wyszukiwarka
Podobne podstrony:
36419 skanuj0006 (136) d) Maciejew i -C. Ip. r.m.. zmodyfikowana fonetycznie końcówka ^-tematowa o z
18127 skanuj0186 (5) Koszty logistykiRodzajowy układ kosztów W układzie rodzajowym kosztów grupowane
2. RZUT RÓWNOLEGŁY PROSTOKĄTNY - METODA MONGE’A W przestrzeni cuklidesowej przyjęto jako układ
skanuj0012 (313) 24 Cele edukacji z przyjętej przez danego nauczyciela filozofii kształcenia (jedni
skanuj0013 (136) c-tcccoo- . succcl pi"^ofći-e.p . łGsrn yfi^pucp ^7 -ehri ncG* . s/va.<-M .
skanuj0017 (136) • Posiadanie kompletu wymaganych dokumentów, a w szczególności:&n
więcej podobnych podstron