25 (247)
200
200
t [ms]
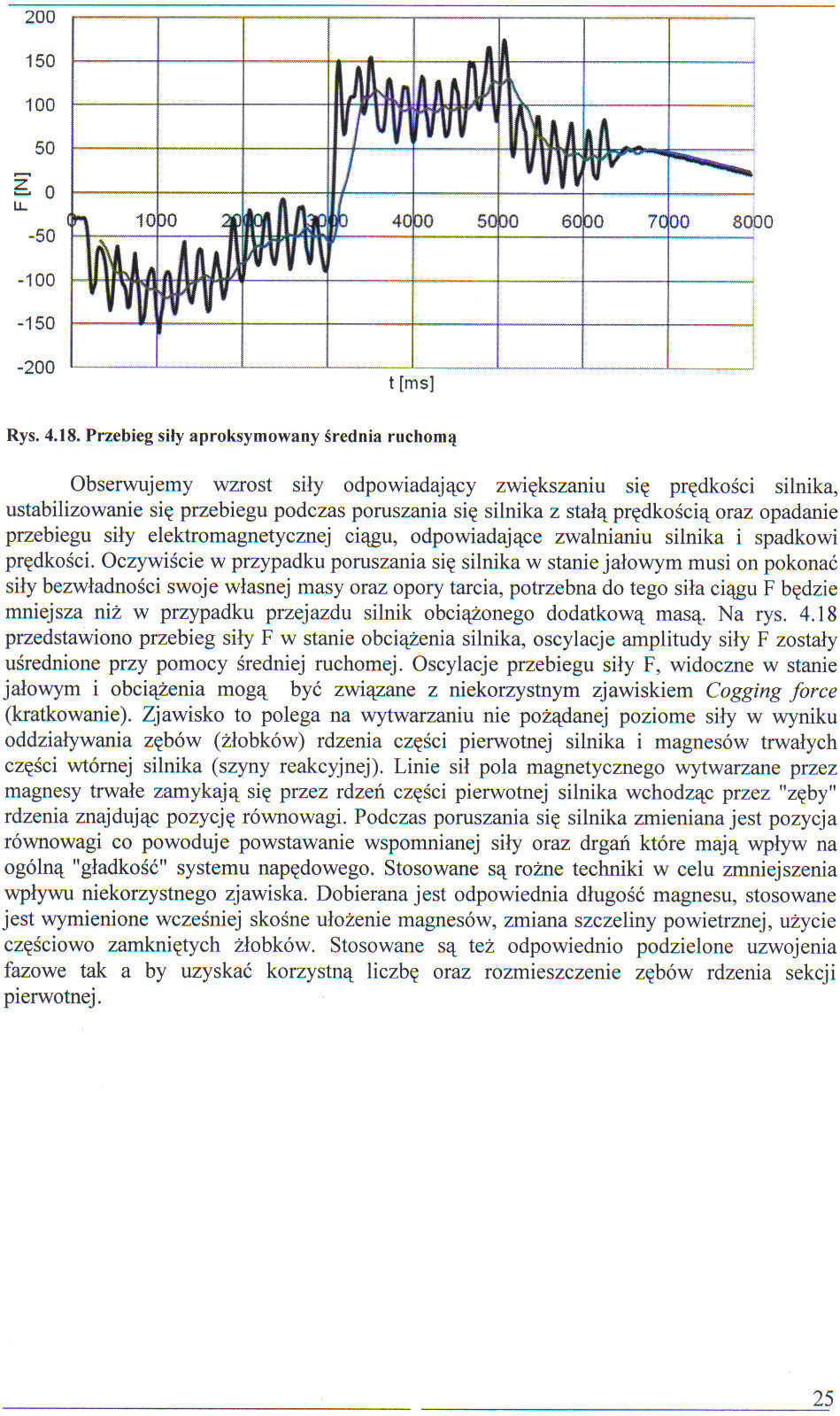
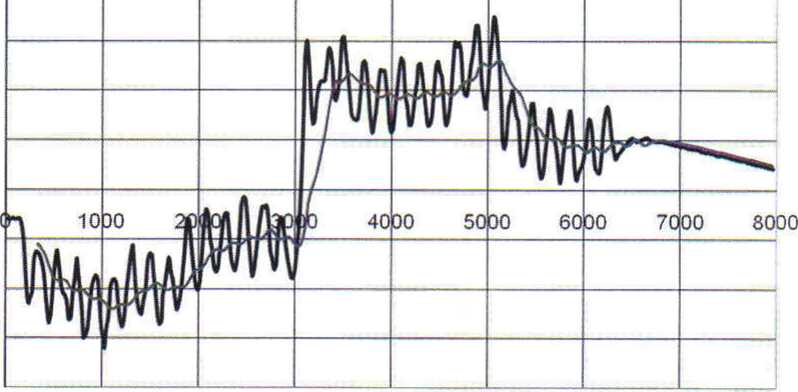
Rys. 4.18. Przebieg siły aproksymowany średnia ruchomą
150 100 50
s 0
u.
-50 -100 -150 -200
Obserwujemy wzrost siły odpowiadający zwiększaniu się prędkości silnika, ustabilizowanie się przebiegu podczas poruszania się silnika z stałą prędkością oraz opadanie przebiegu siły elektromagnetycznej ciągu, odpowiadające zwalnianiu silnika i spadkowi prędkości. Oczywiście w przypadku poruszania się silnika w stanie jałowym musi on pokonać siły bezwładności swoje własnej masy oraz opory tarcia, potrzebna do tego siła ciągu F będzie mniejsza niż w przypadku przejazdu silnik obciążonego dodatkową masą. Na rys. 4.18 przedstawiono przebieg siły F w stanie obciążenia silnika, oscylacje amplitudy siły F zostały uśrednione przy pomocy średniej ruchomej. Oscylacje przebiegu siły F, widoczne w stanie jałowym i obciążenia mogą być związane z niekorzystnym zjawiskiem Cogging force (kratkowanie). Zjawisko to polega na wytwarzaniu nie pożądanej poziome siły w wyniku oddziaływania zębów (żłobków) rdzenia części pierwotnej silnika i magnesów trwałych części wtórnej silnika (szyny reakcyjnej). Linie sił pola magnetycznego wytwarzane przez magnesy trwałe zamykają się przez rdzeń części pierwotnej silnika wchodząc przez "zęby" rdzenia znajdując pozycję równowagi. Podczas poruszania się silnika zmieniana jest pozycja równowagi co powoduje powstawanie wspomnianej siły oraz drgań które mają wpływ na ogólną "gładkość" systemu napędowego. Stosowane są rożne techniki w celu zmniejszenia wpływu niekorzystnego zjawiska. Dobierana jest odpowiednia długość magnesu, stosowane jest wymienione wcześniej skośne ułożenie magnesów, zmiana szczeliny powietrznej, użycie częściowo zamkniętych żłobków. Stosowane są też odpowiednio podzielone uzwojenia fazowe tak a by uzyskać korzystną liczbę oraz rozmieszczenie zębów rdzenia sekcji pierwotnej.
25
Wyszukiwarka
Podobne podstrony:
26 (226) Kalkulacje sił w stanie obciążenia e E £ > -150 -200 - t [ms] Rys 4.19. przebieg siły w
32 (164) 4.2.7 Wartość bezw zględna napięcia w funkcji czasu.a) t[ms] b) Rys. 4.20. Przebiegi napięć
__ , wt a) u—*. b) Rys. 18. Przebiegi napięć, prądu i impulsu sterującego w
214 Rozdział 18 W wyniku symulacji otrzymano przebiegi czasowe pokazane na rysunku 18.6. Rys. 18.6.
OPTYKA 200 150 100 75 50 Obliczyć odległość ogniskową soczewki f oraz
img200 200W*! 200 t T <V <»r~Ą. <V WT*1 i "/®T"1S Rys. 1.77. Pr
200 Rozdział 16 Rys. 16.3. Schemat blokowy równania (16.9) Rys. 16.4. Przebieg kąta 8 w czasie Dla c
Image503 Rys. 4.635. Schemat logiczny programowanego generatora par impulsówa --(25-55)Tb i Rys. 4.6
200 ms = dwa początkowe fonemy angielski (odmiana amerykańska): 20 000 wyrazów pierwszy fonem zawęża
Skanuj#0 Elektrokardiografia (EKG) _1 wydłużenie odstępu PQ ponad 200 ms wskazuje na utrudnienie prz
więcej podobnych podstron