404 (4)
(Ady + L)7 M(Ad,y +L) = min
* -y ~ y
li tl X ii N ~ d .r N d X ~ m>n
W nawiązaniu do zasad rachunku wyrównawczego, sprzeczny układ równań Adv +L = 0 zastępujemy, jak wiadomo, układem równań poprawek Ady + La V, akceptując w ten sposób reszty jego rozwiązania (w takim ujęciu, wektor poprawek jest wektorem reszt lub, inaczej, wektorem residuum, zob. przykład 1.24). Przyjmijmy również, że M = P jest macierzą wag wektora wyników pomiaru (a tym samym wyrazów wolnych L), natomiast N = Px, ustalmy na razie ogólnie, macierzą wag znanych przed wyrównaniem współrzędnych punktów. Wówczas
d v = - A L - -A L
jest takim rozwiązaniem układu równań poprawek, że
V7 PV = min dxPxdx = min
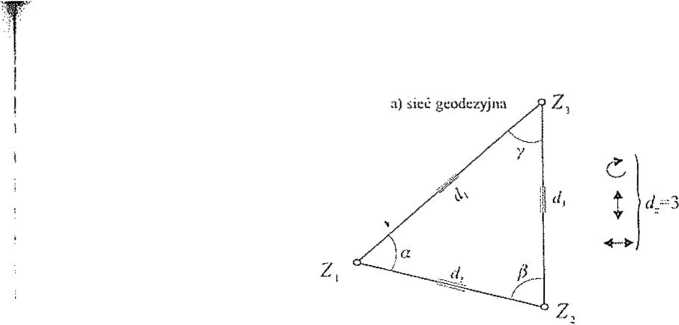
Powróćmy teraz do omawianego przykładu. Otóż jeśli przyjmiemy, że w swobodnym trójkącie wektor d v ~[dxx tiyZx ^ x?1 cIy/? ^xz (W-/x
jest nieznanym wektorem przyrostów do przybiiżonych współrzędnych wszystkich punktów oraz że Px jest diagonalną macierzą wag tych współ-
«'p *
rzędnych, to własność dxPxdx=min można przedstawić w następującej szczegółowej postaci:
d7vpxdy =l>Xy^2xA +PYz[ \ +PXz2^XZ2 +
+ Py*A2 +Pxz/lXy., ¥pw\ =min
Wyrównanie swobodnej sieci geodezyjnej, z zastosowaniem rozwiązania dx =-App ,L, polega więc z jednej strony na wyznaczeniu takich przyrostów d^, że ę(d,y ) = V7 PV = min (tak jak dotąd), natomiast z drugiej
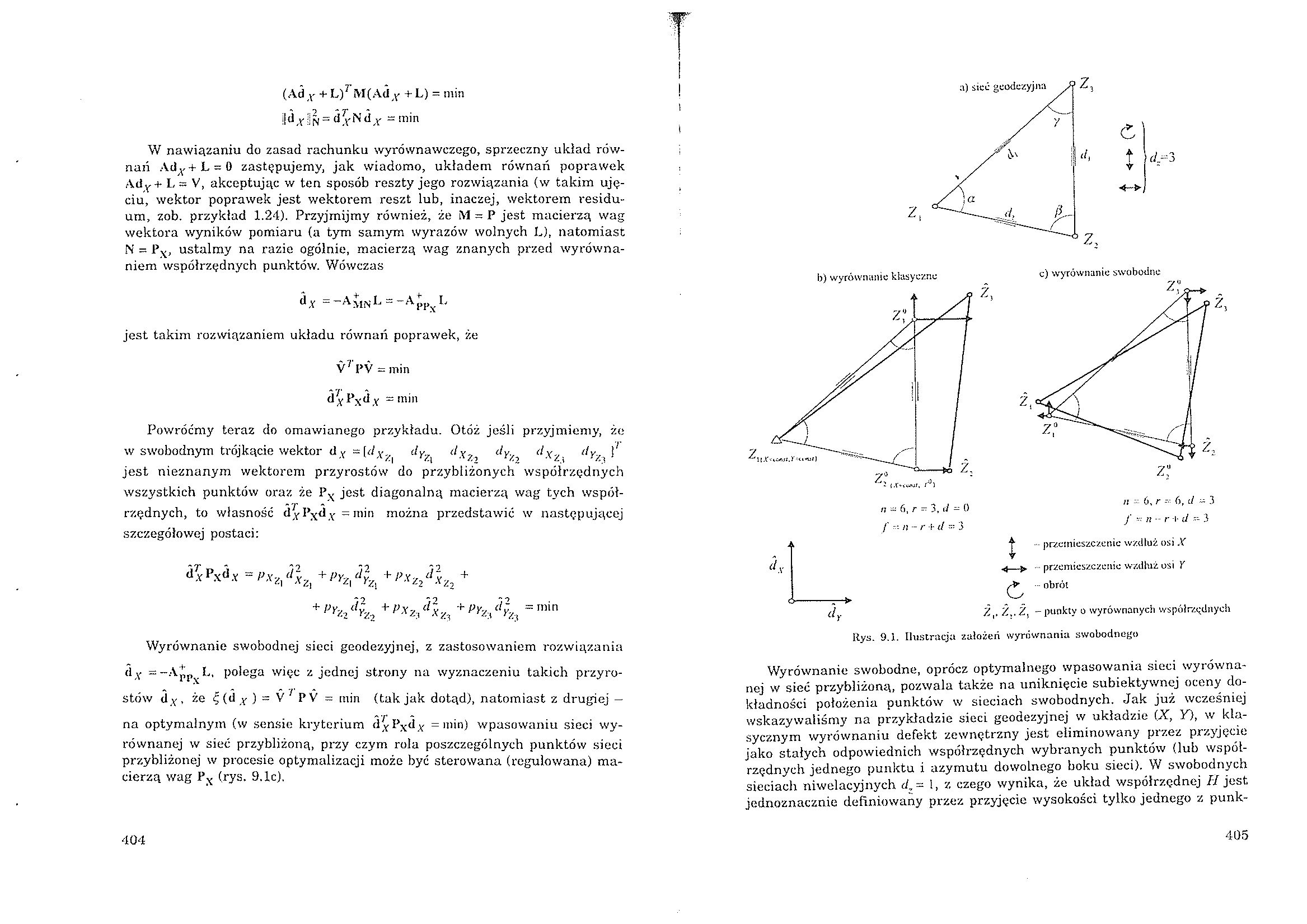
na optymalnym (w sensie kryterium dxPxdx = min) wpasowaniu sieci wyrównanej w sieć przybliżoną, przy czym rola poszczególnych punktów sieci przybliżonej w procesie optymalizacji może być sterowana (regulowana) macierzą wag Px (rys. 9.1c).
b) wyrównanie klasyczne


/i -• 6, r 6, il ~ 3 / n - r t- 4 3
c) wyrównanie swobodne
£ ■ ■■ przemieszczenie wzdłuż osi X
■4—> ■■■• przemieszczenie wzdłuż osi Y - obrót
dy Z,, Z.. Ź, - punkty o wyrównanych współrzędnych
Rys. 9.1. Ilustracja założeń wyrównania swobodnego
Wyrównanie swobodne, oprócz optymalnego wpasowania sieci wyrówna-nej w sieć przybliżoną, pozwala także na uniknięcie subiektywnej oceny dokładności położenia punktów w sieciach swobodnych. Jak już wcześniej wskazywaliśmy na przykładzie sieci geodezyjnej w układzie (X, Y), w klasycznym wyrównaniu defekt zewnętrzny jest eliminowany przez przyjęcie jako stałych odpowiednich współrzędnych wybranych punktów (lub współrzędnych jednego punktu i azymutu dowolnego boku sieci). W swobodnych sieciach niwelacyjnych t/, - 1, z czego wynika, że układ współrzędnej B jest jednoznacznie definiowany przez przyjęcie wysokości tylko jednego z punk-
405
Wyszukiwarka
Podobne podstrony:
im2 1 IJ 1 łl i 1 1 11 ■ Wm 7! ii 1 ■ 1 u 1 fi 1II 1 li II tl II l! • u ’ !• -
skanuj0035 3 eoo(+ mi «■ 4- - 4-—i——P—i- t i11 WL fi Ti——I—r i—i i _ Tl II li li i iii i
V Tl • ^ - * - ii U i * &-1 _*j li I ę%
061 5 lwi mim Mm i.li i1 n i<l/rmti „r/ądy i
IMGP4670 tn
981334`8506609167226!12134442 o HI U Ili l
<*>#£** Hf fĄ Mnjm* W Jrr ,v Hp K v!Uł<. l < wniL X, 1 l.li.T7 II* tl,
Chemia2 0 lilii III i /i/dl»wvi li W III M li tl Ml .pnsoll 1110/11.1 Oll/ymyu U i ■ I • II . 1
♦ ^ iL <j Tl l
skanuj0010 (274) -i li~ -«r II i* -iSM W 0 a) O&Sz&uiąz cząsteczkami jakoczasSó M’ Oóćśshąąz
skanuj0013 I ł llni
eucharist f Hki j Iw Itf ] i li Nkl! ii ■ 1 i i lOTv ( ^ ^ / V *-W
Zdjęcie3718 Qv V Wv ? i 2 * Ą -iĄ -i U g f - I tM <C 6 il U ii « Ji li
więcej podobnych podstron