DSC00424

PNEUMATYCZNE I KYDRAUCZNE ELEMENTY AUTOMATYKI
di i r o to
f>0 I-f7f
Y(0 * At sin(2 it f f ♦ «p)
(tLl r* O »-0
f-o
r-o \~o
*-4, \u4 2 »/f)
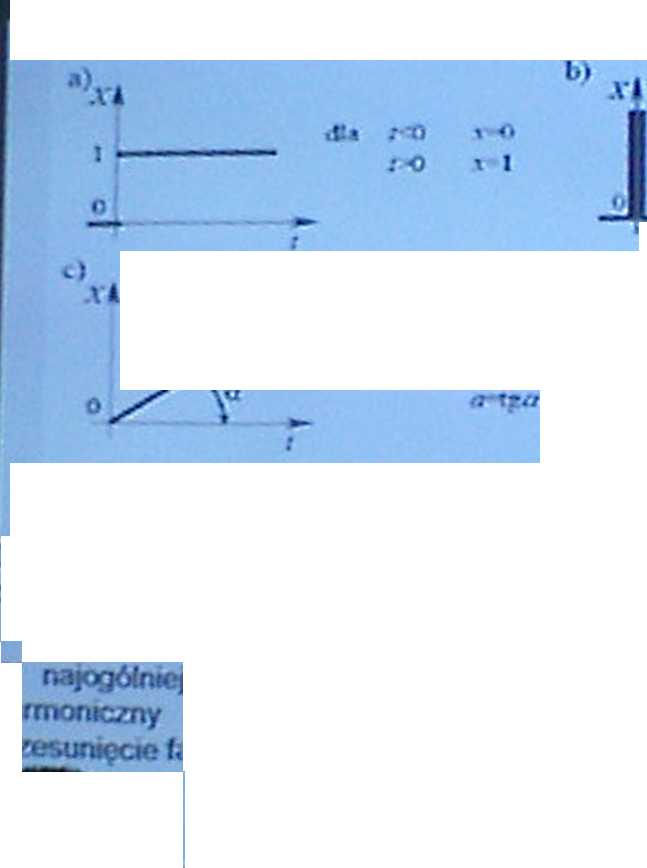
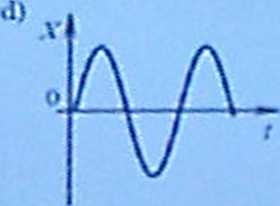
Standardowe wymuszona .1) s*cfc jodhosfeowy. b) impute jcdnosftowy c) ffcokpręcfcośct. d)
sygnał harmoniczny
Xi określenia właściwości dynamicznych w ujęciu częstotliwościowym na wajtoe xzyrzadu wprowadzamy standardowy sygnał harmoniczny
X(0 *Am sin 2 Tr / f
najogółnKfszym przypadku na wyjściu przyrządu otrzymujemy rówmcz sygnał moniczny o tej samej częstotlfwośa f ale innej amplitudzie i posiadający zesunięcie fazowe <p względem wymuszającego sygnału w^rjśaowego

Wyszukiwarka
Podobne podstrony:
DSC00413 PNEUMATYCZNE I HYDKAUCZNE ELEMENTY AUTOMATYKI Mk* jednoznaczność charatówyslylu określa hrJ
DSC00422 I_ PNEUMATYCZNEI HYDfcAUCZNE ELEMENTY AUTOMATYKI
DSC00425 W PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI
DSC00427 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI udania wtaścrwośa dynamicznych przyrządów prz
DSC00429 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI Biadania wfciściwośa dynamicznych przyrządź p
DSC00430 r PNEUMATYCZNE I HYDRAUCZNE ElEMENTY AUTOMATYKI JdpDWKjdź przyrządu zerowego rządu na zadan
DSC00431 - PNEUMATYCZNE I HYDKAUCZNE ELEMENTY AUTOMATYKI Pdpowiedż przyrządu zerowego rzędu na zadan
DSC00432 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI pierwszego rządu Przyrządy pomiarowo pierwsze
DSC00433 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI Biała czasowa 11 wzmocnienie statyczne k stan
DSC00434 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI liość ciepła dopływającego (T > Tv) do prz
DSC00443 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI nalizując przedstawiono zależności i wykresy
DSC00444 PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI łąd dynamiczny właściwościami dynamicznymi pr
DSC00420 ’SV‘,I‘K »V My, . u 1 J‘ } PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI Właściwości dyna
DSC00441 W A> ..w: •w u- PNEUMATYCZNE I HYDRAUCZNE ELEMENTY AUTOMATYKI przyrządu drugiego rzędu n
IMGP3887 PNEUMATYCZNE IHYDRAUCZNE ELEMENTY AUTOMATYKI remaoanemometiy są to przyrządy służące do pom
IMGP3801 PNEUMATYCZNE IHYMAUCZNE ELEMENTY AUTOMATYKI PRZEPŁYWOMIERZE eptywomierze to przyrządy służą
IMGP3887 PNEUMATYCZNE IHYDRAUCZNE ELEMENTY AUTOMATYKI remaoanemometiy są to przyrządy służące do pom
IMGP4025 PNEUMATYCZNE IHYDRAUCZNE ELEMENTY AUTOMATYKI Regulatory pneumatyczne egulatory pneumatyczne
IMGP3801 PNEUMATYCZNE IHYMAUCZNE ELEMENTY AUTOMATYKI PRZEPŁYWOMIERZE eptywomierze to przyrządy służą
więcej podobnych podstron