HPIM0831
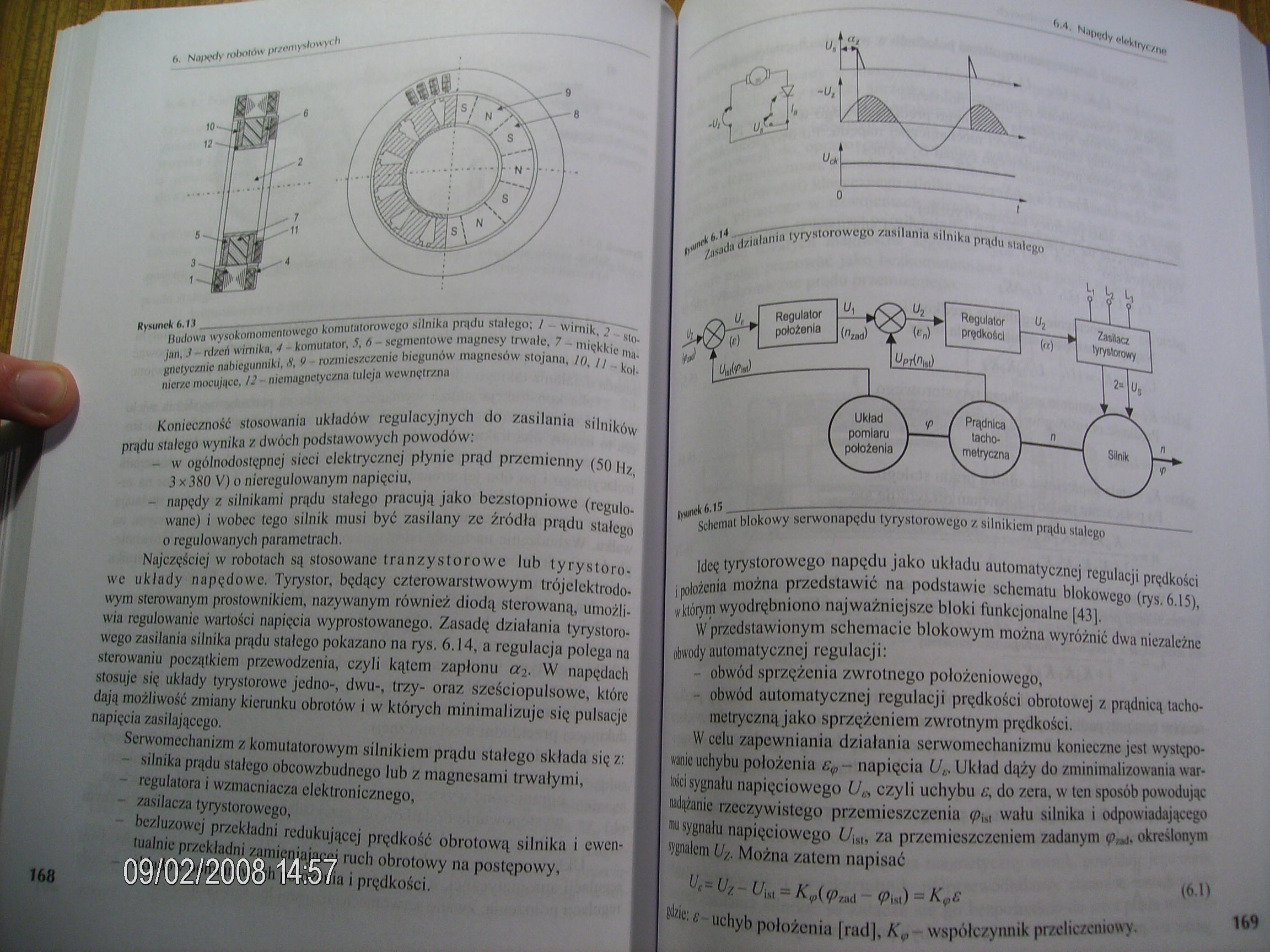
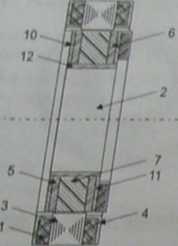
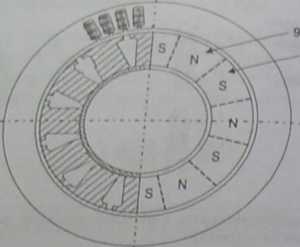
Rysunek 6, 13 _
Budowa wysokomomentowego komutatorowego silnika prądu stałego; / — wirnik, 2 - sio. Jan, 3 - rdzeń wirnika. 4 - komutator, 5% fi - segmentowe magnesy trwale, 7 - miękkie magnetycznie nabiegunniki, «v, v rozmieszczenie biegunów magnesów stojana, 70, // - kołnierze mocąfące, 12 - niemagnetyczna tuleja wewnętrzna
Konieczność stosowania układów regulacyjnych do zasilania silników
prądu stałego wynika z dwóch podstawowych powodów:
- w ogólnodostępnej sieci elektrycznej płynie prąd przemienny (50 Hz, I 3 x380 V) o nieregulowanym napięciu,
- napędy z silnikami prądu stałego pracują jako bezstopniowe (reguło- I wane) i wobec tego silnik musi być zasilany ze źródła prądu stałego I o regulowanych parametrach.
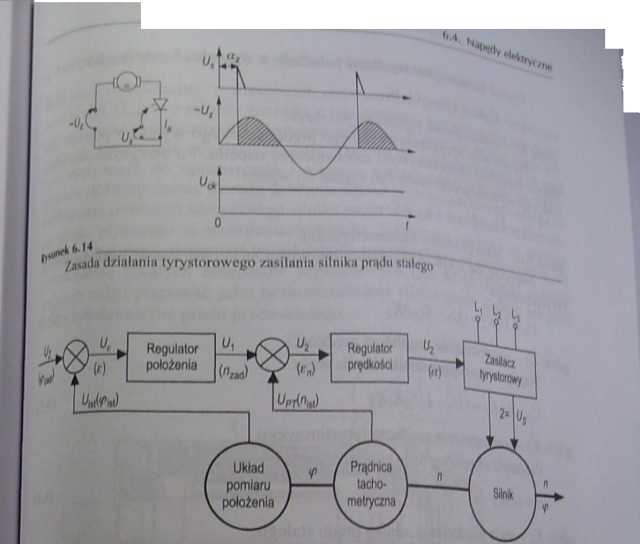
Najczęściej w robotach są stosowane tranzystorowe lub tyrystoro- I we układy napędowe. Tyrystor, będący czterowarstwowym trójelektrodo- I wym sterowanym prostownikiem, nazywanym również diodą sterowaną, umoźli- I wia regulowanie wartości napięcia wyprostowanego. Zasadę działania tyrystoro- I wego zasilania silnika prądu stałego pokazano na rys. 6.14, a regulacja polega na I sterowaniu początkiem przewodzenia, czyli kątem zapłonu a2. W napędach I stosuje się układy tyrystorowe jedno-, dwu-, trzy- oraz sześciopulsowc, które I dają możliwość zmiany kierunku obrotów i w których minimalizuje się pulsacjc I napięcia zasilającego.
Serwomechanizm z komutatorowym silnikiem prądu stałego składa się z: I
- silnika prądu stałego obcowzbudnego lub z magnesami trwałymi,
- regulatora i wzmacniacza elektronicznego,
- zasilacza tyrystorowego,
- bezluzowej przekładni redukującej prędkość obrotową silnika i ewen- I
tualnic przekładni , l,c*1 obrotowy na postępowy,
i prędkości.
fytuiioKjyĄ .
Schemat blokowy sorwonapądu tyrystorowego z silnikiem prądu stałego
Ideę tyrystorowego napędu jako układu automatycznej regulacji prędkości i położenia można przedstawić na podstawie schematu blokowego (rys. 6.15), wktórym wyodrębniono najważniejsze bloki funkcjonalne [43].
W przedstawionym schemacie blokowym można wyróżnić dwa niezależne obwody automatycznej regulacji:
i obwód sprzężenia zwrotnego położeniowego,
- obwód automatycznej regulacji prędkości obrotowej z prądnicą tachometryczną jako sprzężeniem zwrotnym prędkości.
W celu zapewniania działania serwomechanizmu konieczne jest występowanie uchybu położenia ep - napięcia U* Układ dąży do zminimalizowania war-(ości sygnału napięciowego Ua czyli uchybu e, do zera, w ten sposób powodując nadążanie rzeczywistego przemieszczenia (pM wału silnika i odpowiadającego mu sygnału napięciowego U\%{, za przemieszczeniem zadanym ^.określonym sygnałem Uz. Można zatem napisać
Ug= Ui ~ £/|gt — K<p((pwd ~ <P\«)= Kęś
gdzie: e- uchyb położenia [rad], /^-współczynnik przeliczeniowy.
Wyszukiwarka
Podobne podstrony:
Image 79 83 Rys. 3.40. Silnik prądu stałego z wirnikiem tarczowym wg [8]. a) zasada nadruku uzwojeni
Uczciwek028 L3-L2 L1 N ■ PE- Rysunek 13. Schemat zdalnego sterowania silnikiem wentylatora
Układ hamulcowy j Tłoczki
Uczciwek028 (12) Rysunek 13. Schemat zdalnego sterowania silnikiem wentylatora M- silnik; F1 - bezpi
10 Rozdział 2. Modele matematyczne silników prądu stałego DC ea Rysunek 2.1. Zespółnapędowy z
Rysunek 2.2. Zespółnapędowy z silnikiem prądu stałego i schemat zastępczy dla obwodu twornika (2.9)
16 Rozdział 2. Modele matematyczne silników prądu stałego a) Rysunek 2.5. Równoważne postacie modelu
Aktory elektromechaniczne Silniki prądu stałego: (bez/)komutatorowe, z rdzeniem kubkowym, z magnesam
więcej podobnych podstron