HPIM0848


tyi muk 74____________m____________
Mwy i f"Tf----tr *kyr* pr7xi*/*Łu**0y, / wjpm, 2 wirnik ifAl
W pojmie n umieszczone dwa uzwojenia (selsyn dwufazowy, zwany tak-7$ rtrołwerem), a na wnuku jedno uzwojenie- Uzwojenia stojao# «ą zMiktne pfk/kw przemiennym o c/epoeUwoici/== 200 Hz r 2 k\\z, o napięciach pr/eau-mpyrM wzgkd&n siebie o W' stopni elektrycznych
V\ ** Ut&non (7/2)
Uj^UifiowM i (7,2)
Napłęct* U* indukowane w wirniku jest przekazywane do układu sterującego za pośrednictwem mzotek i pierścieni ślizgowych bądź bezstykowo przez.
współdziałaj#* ze sobą cewki, z których jedna jest umieszczona na wałka wirnika, i druga w ttojanie. Wynosi ono
U a-MU&wp-Uyóntp) = KUdaintotcoatp - cmoriaintp) CIA)
U»-KU#\ftun - <p) CIA)
gdzie K - przekładnia sełtyna,
%)syn przelicznikowy jest więc przetwornikiem, który dokonuje przekształcenia kątowej wielkości obrotu tp wirnika na sygnał napięciowy /% zmie* mający m zgodnie z równaniem (7,5), Z równania tego wynika, źe napięcie wyjściowe Uw tna ataki amplitudę, lecz zmienna fazę, przesunięta o kąt ^ wzgMem sygnału odniesienia, Przedstawiony sposób zasilania tworzy z selsyna analogowy układ pomiarowy, który określa kat fp obrotu wirnika przez przesuniecie fazy sygnału elektrycznego, fttęd leż. mówi się, że selsyn w takim układzie działa jakoprzerywnik fazy, jednemu obrotowi wirnika odpowiada przesunięcie fazy sygnału elektrycznego o 36Ó* (5K j.
Współpracujący / selsynem układ elektroniczny generuje napięcia l/j j Ui zasilające uzwojenia stojana, a także przekształca sygnał analogowy - napięcie indukowane w wirniku na sygnały impulsowe (cyfrowe) podawane do wzmao 202 niac/e i regulatora położenia,
Seł^yn przelicznikowy może pracować leż w układzie, w którym działam* . oparte oa przetworzeniu wartości napięcia U» generowanego w uzwojenia 1 jrtjika na sygnał cyfrowy, co oznacza pracę sefeyn* w układzie sterowani* ^mułowego (5#J,
^ Seisyny są jednymi z. bardziej rozpowszechnionych uktadów pomiaru* ^cłr gdyż maja następujące zalety:
I f bardzo wysoką dokładność pomiaru położenie kątowe można określić / dokładnością ±10', i/n . ok. f/1000 pełnego obrotu,
2) bardzo dużą Uwałość i niezawodność wynikającą / brak i części zużywaj Cj4i się (jeśli napięcie indukowane w wirniku jest przekazywane bezsiyi//v.o)
» 7) nieskomplikowany układ przetwarzania sygnał/)* pomiarowych.
łnduktosyn liniowy i obrotowy
jaiuktosyn jest indukcyjnym czujnikiem do bezpośredniego pomiaru przemieszczeń w ruchu postępowym - łnduktosyn liniowy lub ruchu obrotowym - ónM-fotyn obrotowy, łnduktosyn liniowy składa się z dwóch elementów (rys 7.5):
|) segmentowego liniału / zamocowanego do zespołu pary kinematycznej o ruchu postępowym, np, bramy robota pracującego w układzie kartezjańskim,
2) suwaka 2 zamocowanego do współpracującego elementu.
Długość pojedynczego segmentu liniału wynosi 250 mm lub 10 cali. Wartość szczeliny powietrznej między suwakiem, a liniałem wynosi od 0,1 do 0,25 mm, Pewną odmianą induktosyoa liniowego jest łnduktosyn taśmowy wykonany ze sprężystej taśmy stalowej, na której są umieszczone miedziane uzwojenia, łnduktosyn taśmowy może być dostarczany w odcinkach o długości do 1800 mm,
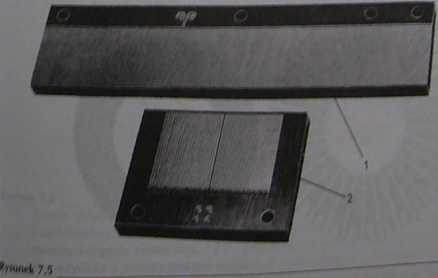
łnduktosyn liniowy; / <= liniał, 2 - suwsk
Wyszukiwarka
Podobne podstrony:
.} 4 ✓ X- / “♦ - / 4... I 4. -r i 4 4 tf- tr <■ ✓ K i -* ••- i- V 7 1 1 t V •* “ r iw 1711 »***?
4 (1270) 74 Harish J oh.tr i ZRÓWNOWAŻENIE ŚRODOWISKA WEWNĘTRZNEGO I ZEWNĘTRZNEGO Przestrzegając pos
JtPM Vti ru 2 74> jtrtf V *1 g ------ ■tf W < ■* inocyttcus composttm
banner88x31 digart.pl Tf Tr T
Statystyka20110111�007 J tr.JVU L/*ri^Q..LU. CuVvCŁ
IMG010 (74) tf* rgmsrw w prt«fcro
strona82 l^rw*/ *xi)y> je v?u/ci tyW Tyi/^jfo^o W tf rt
Swarovski Mania (74) #u-?(j*cć:tr#h<cft-->f;i:i i«sT .»7L 9Mi:6ttXaMfr>T«
mp7 ?= P= N-W-łg Y- trg.^[H-S) gH i-ir-B.Ł-K H- IT£h 1i C2-hB-hii Jte - ^Tr£^j^M-nrEz(f-^ tf-lT B2 (
(rjf wffnąn Kt) -ryą n 3iMć?f&> (r tr*) tf/uHHtm■4$> (t fpft) *pM^9 (Off^ow f - )1»»fyur W
HPIM0849 f
HPIM0850 ? Układy Budowa pmtwonuJtt obaHottodinpulsowego (NŃfcahainfc / - żarówka. >T Tr »y.przy
więcej podobnych podstron