HPIM0849
f | l|.l.tl|\ «W|,l*tł» *111'
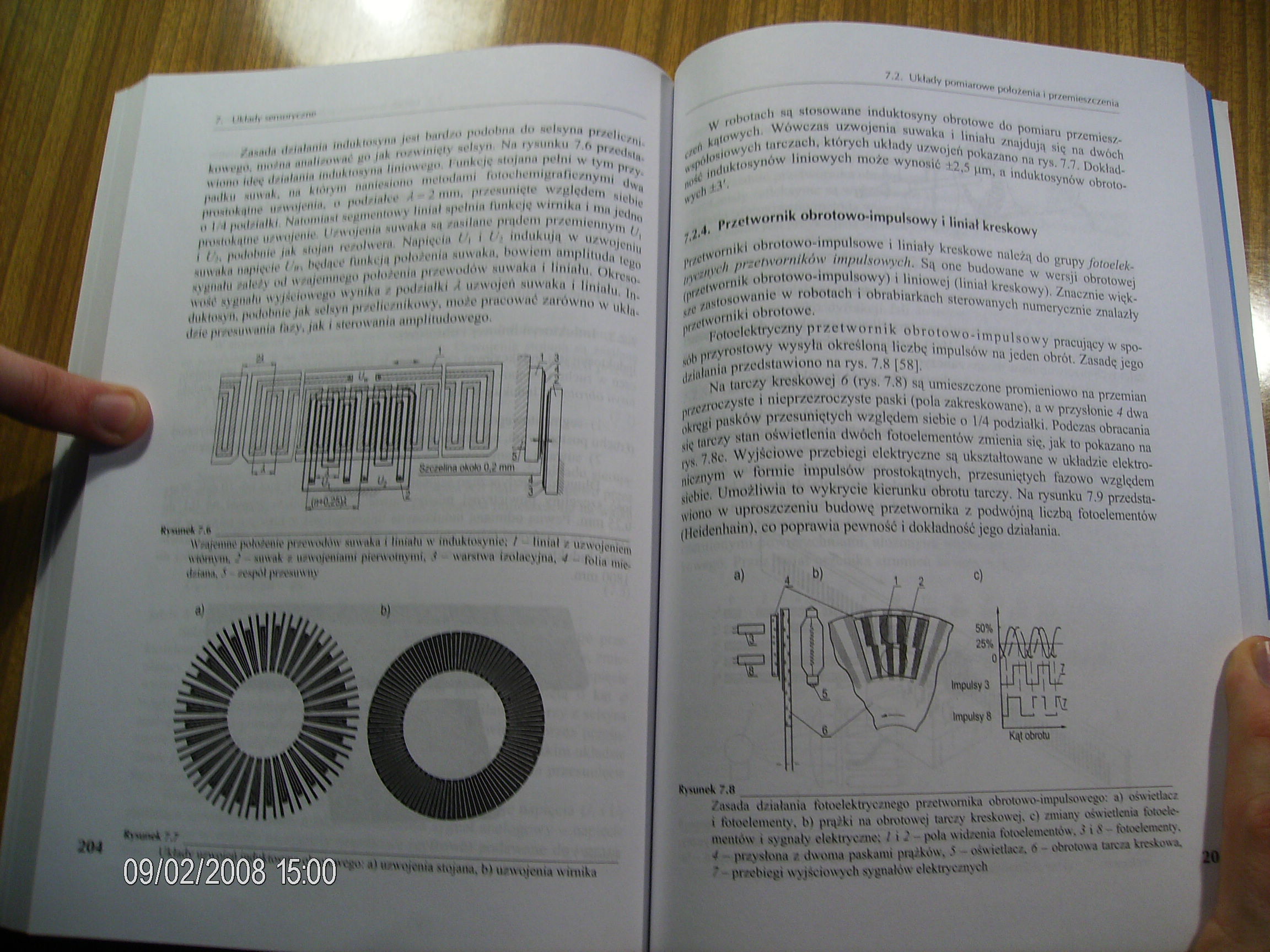
łmM ilfltiliuilit Induktoiyiin jut blKlW podobna do schylili |tr/clKvn| kMgOt iiiullflil milllowKĆ i’i‘ luli hwmvIiiIi,‘I\ ioUvii Nu i y.minkii ’/>ń pnwditi» wtuiio ||||ji| ikltiłiiiiiii imllildi^yiiii liniowego. I*iimKi‘|»; fdo|niio polni w ^.Vlii priry. |H\ilkli NllWnli, mi liidiym iniiilNulio iiioIihIiihiI lonulieiulgHine/nyiiil dwu łHWtokąlM n^\vit|vMiłii. n poiltlnlcc ^ J mm, pi/ONUitl^to względem ilchl?
0 |l pmlzliiIM NhIuiiiIiiM NegijMkowy liniul Npoliilii llitikiję wirniku I miii jedno
|ii\iHl\iki|liii' wm\\m Uzwojeniu miwnkn mi riudlNiic prądom pr/oiiileniiyni (/,
1 (\, podobnie juk nliijiiii iv#oI\vimii. Napięcia /1 I (•) liiilllkulą w ti/.wnjonhi niiwttkn twpkjele l'in Męce Itotikelą pult O on In suwaku, bowiem niiiplltiidii lego nv|iiiiilll ZtiWy ml \\;iiloniiiopo polośeuln przewodów suwaka I llnlnhi, Ok reno* \vo<i' nv||iiiiki Wgltóowogo wyniku t pmklulkl I uzwojeń suwaku I liniału, In. duktowa, (Htdowilljlk noNyu pizcilczulkowy, ińoilo pracować zarówno w ukln* iMOpIrOHlIWllUllI l\t#\\ jl\k I nlmiwmillt amplitudowego.
MMMMMI
h—' (I
Ihwwk M
WhOmih' pfii |'itv'\wHk'w Mli I iliitnlu w liulukiosynloi / liniul * uzwojeniom \\wwvvw, ‘ Mk i w\\mj«\tiuul pteMnyiul) i wnwiwn Izolacyjna, 4 Iblin itilc*
* *iohuwi. hi u#\v\>iciu« wirnika

7,2. Układy pomflHiWP poło/wili1 pr/wniwr/pnta
o/ KihiiiMoli mi HloMowitne induktosyny obrotowe do pomiaru przemiesz-kulowych. Wówc/iih uzwojenia suwaku i liniału /najduji) się na dwóch (i^i^jowych lnic/uch, których uklndy uzwojeń pokazano nu rys. 7.7, Doklnd-"Tlnduktosynów liniowych może wynosić ±2,5 |.im, n induklosynów obroto-
lUjB* .>
Przetwornik obrotowo-lmpulsowy i liniał kreskowy przetworniki obrolowo-impulsowc i lininly kreskowe należą do grupy fotoclek-istnych ptutwornlków impulsowych. Są one budowane w wersji obrotowej (prrotwornlk obrolowo-lmpulsowy) i liniowej (liniuł kreskowy). Znacznie więk-,;(«znslosownnle w robotach i obrabiarkach sterowanych numerycznie znalazły przetworniki obrotowe.
Fotoclcktryczny przetwornik obrotowo-impulsowy pracujący w spodli przyrostowy wysyłn określoną liczbę impulsów na jeden obrót. Zasadę jego iltJitlitnitt pr/.cdntnwlono nu rys. 7.8 [58],
Nu lurc/.y kreskowej 6 (rys. 7.8) są umieszczone promieniowo na przemian przezroczyste i nieprzezroczyste paski (pola zakrcskowanc), a w przysłonie 4 dwa okręgi pasków przesuniętych względem siebie o 1/4 podzinłki. Podczas obracania ulę tarczy stan oświetlenia dwóch fotoclcmcntów zmienia się, jak to pokazano na rys. 7i8o. Wyjściowe przebiegi elektryczne są uksztultowunc w układzie elektronicznym w formie impulsów prostokątnych, przesuniętych fazowo względem siebie. Umożliwia to wykrycie kierunku obrotu tarczy. Na rysunku 7.9 przedstawiono w uproszczeniu budowę przetwornika z podwójną liczbą fotoclcmcntów (Heldcnltnin), co poprawia pewność i dokładność jego działania.
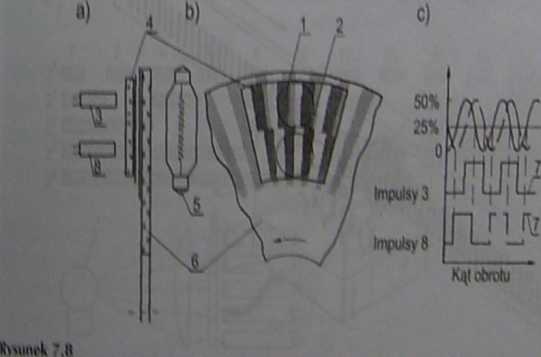
Zasada dilutuilia mtoclekt.rycz.nego przetworniku obrotowwimputsowego: a) oświetlacz i toioclemciuy. b) prt|#.ki nn ohrotow^j larcay kreskowy, c) limany oświetlenia fotode-mentow i sygnały elektryczne; iii- pola widzenia tbtoelementów, i i S - totodementy, 4 - pnsysbna a dwoma paskami prąikOw, 5 - oświetlacz, 6 - ohrotowa taieaa kreskowa, } - przebiegi wyjściowych sygnałów clckny c/mch
Wyszukiwarka
Podobne podstrony:
i M IMI * k
skanuj0058 (10) 96 B. Cieślar Wn (111-14) gdzie W„fan (111-15) III.3.2. PRĘTY O PRZEKROJU ZAMKNIĘTYM
skanuj0005 (369) ćwiczenie 21 167 B Czas tl narastania napięcia na kondensatorze od wartości UG do w
skanuj0058 (10) 96 B. Cieślar Wn (111-14) gdzie W„fan (111-15) III.3.2. PRĘTY O PRZEKROJU ZAMKNIĘTYM
SPM?283 by i metody wychowania jako tl_______kontroli rodzicielskiej: Jak dziecko staje uę zdoir-do
DSC00751 IMIĘ ) (NAZWISKO (PODGRUP Tl. diagnostyka i terapia c horób tarc zyc y. I. Pedał wskazania
Przedsi¦Ć+ TŁbiorczo¦Ć+ TŁ¦Ć+ TŁ 4 ■15. Twierdzenie, że działalność przedsiębiorcy prowadzi raczej d
DSC04009 l( tl,NA ( MAMAK 2<> i
Obraz (36 ( ( 5 I h e r X fc )i ć i I Z] II Tl ii Dl u w ż rr nie jest zbyt duża (do
DSC00751 IMIĘ ) (NAZWISKO (PODGRUP Tl. diagnostyka i terapia c horób tarc zyc y. I. Pedał wskazania
tL UKLUIIU *JLU U LU IULUaUJJ UpubiKO etti tcpa *do por ima cc*ta ollmpo PUERTA 3 VI * A?
page0115 111 Ojciec rozumiejąc, że u ciotki nabrała ochoty do stanu klasztornego, osadzi ją u siebie
fizyka wyk 2 25, Klocek u masie /w“0.5kg zsuwa się i równi <> dlm-. 12.5 m n
HPIM0896 10. Zastosowania robolów przemysłowych Roboty bramowe liniowe są stosowane głównie do za- i
C (111) Część 16, 17, 18. Krążki służące do przyklejenia kół do ostoi parowozu i do wózków tendra. K
więcej podobnych podstron