HPIM4950
Zeslaw - 7
T-I9
T-20
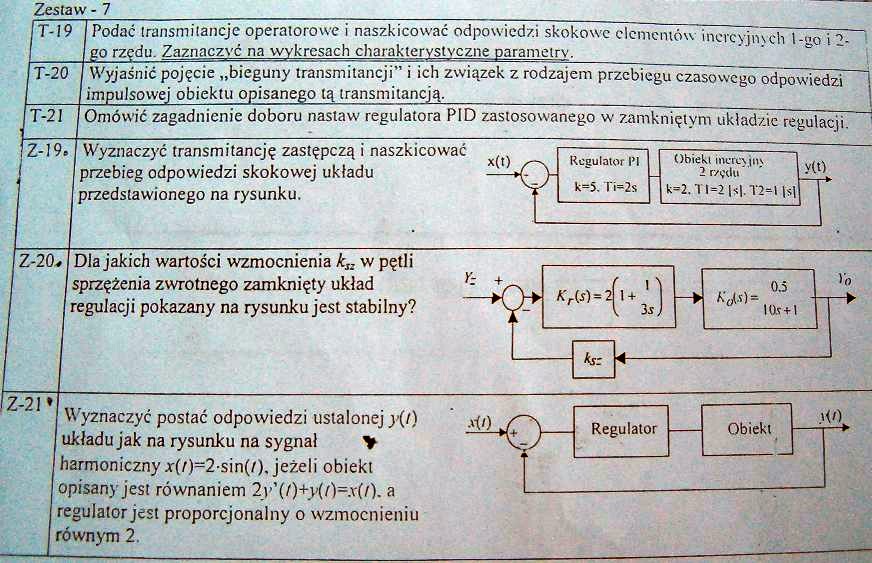
Podać Iransmitancje operatorowe i naszkicować odpowiedzi skokowe elementów inercyjnych l-"o i po rzędu. Zaznaczyć na wykresach charakterystyczne parametry.
Wyjaśnić pojęcie „bieguny transmitancji” i ich związek z rodzajem przebiegu czasowego odpowiedzi impulsowej obiektu opisanego tą transmiiancją.
T-21
Omówić zagadnienie doboru nastaw regulatora PID zastosowanego w zamkniętym układzie regulacji.
IZ-19.
Wyznaczyć transmitancję zastępczą i naszkicować przebieg odpowiedzi skokowej układu przedstawionego na rysunku.
x(t)

|
Regulator IM |
Obiekt im.*rc\iuv | |
|
_ |
2 F/ędlt | |
|
k=5. I «=2s |
k=2.TI-2|s|.T2-l |s\ |
y(t)
Z-20,
Dla jakich wartości wzmocnienia kS2 w pętli sprzężenia zwrotnego zamknięty układ regulacji pokazany na rysunku jest stabilny?
—*o
|
Kr(s) = Ą\+ ' ] |
—> |
0.5 M-O |
|
1. 3i) |
IUf + 1 |
ksz
Z-21 *
Wyznaczyć postać odpowiedzi ustalonej y(l) układu jak na rysunku na sygnał > harmoniczny jr(/)=2-sin(/). jeżeli obiekt opisany jest równaniem 2y'(l)+y{i)=x(i). a regulator jest proporcjonalny o wzmocnieniu równym 2.
AlW
Regulator
Obiekt
></)
---
Wyszukiwarka
Podobne podstrony:
HPIM4949 T-16 Podać transmilancje operatorową i naszkicować ch-ki częstotliwościowe regulatora P1D.
Pala-ecntologia Polonica, T. 1, 1929. i 1 PI. IX l(x3) - - fl LI 3(x3) 20 I 19 I9<z 20
Agia Trias 185820 Gdańsk 16.04.2020 20.04.2020 Operator SwissMarine Services SA Frontier
SEA4E0AK711000Y1239FALD03 5ZZŁ 1 z 5 6 7 B & 16 11 12 I3 14 I5 16 X 1T 16 I9 20 22 V
38077 img024 (20) /t T - "Podać Wm h i «- i n iaOSio, b3 0 O ij
P2 19. Podać definicję przekształceń elementarnych i twierdzenia ich dotyczące, f/j) 20. Podać defin
418 (12) - 413 - ,Za<lsinie_£i2£ Dla obwodu z rys. 5.20 napięcia u(t) w postaci operatorowej możn
23 (176) Ha wejście odbiornika /gniazdo UKF/ w układzie jak na rys. 20 podać sygnał o parametrach Fs
zdj?cie1377 BMP2 gen wykryty w Islandii znajduje się na 20-tym chromosomie w pobliżu genów
img067 7A DANI A 7A DANI A 4.20. x-V*2 + 3x + 2 , -, dx. x+Jx2 +3x + 2 ODPOWIEDZI
2.2. Pytania 16-20 Przeczytaj uważnie poniższy list i odpowiedz na pytania, wybierając właściwą
Pict0026 (16) Fentanyl, DUR0GES1C (plsiitr) Plailcr o powierzchni 10,20,30 1 40 on1 dostarcza odpowi
c) Egzamin składał się z 20 pytań. Za każdą dobrą odpowiedź można było otrzymać 7 punktów, a za każd
20 21 (2) 2.1. Układ zasilania — gaźnik Gaźnik jest elementem motoroweru, którego
Egzamin z fizyki I termin - teoria 1. Podać dla ruchu obrotowego odpowiedniki
więcej podobnych podstron