HPIM5132
gdzie: M,i - obliczeniowy moment dynamiczny, Kj - współczynnik dynamiczny zwielokrotniający amplitudę drgań układu
przy czym
to _ T„ _ okres drgań własnych ruo T okres drgań
i// = (o/h jest współczynnikiem tłumienia.
Maksymalny moment w układzie napędowym wystąpi w okresie rezonansu, tj. gdy aj = oio; wtedy
Kd
max

2rc
(1.99)
Współczynnik dynamiczny jest funkcją sztywności sprzęgła c oraz jego tłumienia i//. Z rysunku 1.45 widać, że sprzęgło podatne o charakterystyce linio-
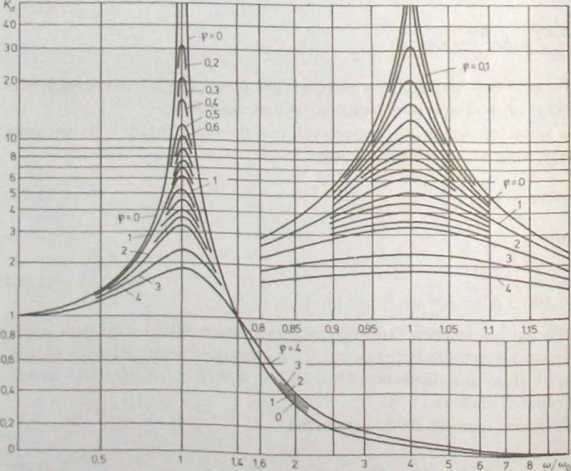
RYS. 1.45. Wykres rezonansowy sprzęgła podatnego z charakterystyką liniową
wej tylko wtedy wywiera korzystny wpływ na właściwości dynamiczne układu, gdy K,i < I, tzn. (o/oio > 1,4. Należy więc dobierać sprzęgła podatne o takich właściwościach, aby stale pracowały przy częstościach nadkrytycznych. przechodząc przez rezonans w początkowym okresie rozruchu, kiedy moment dynamiczny nie jest jeszcze zbyt duży. Można również stwierdzić, że nawet przy bardzo małej amplitudzie momentu wymuszającego można osiągnąć bardzo dużą amplitudę drgań wymuszonych, gdy tłumienie nie będzie zbyt intensywne (małe iy) i gdy częstość siły wymuszającej (co) będzie bliska częstości drgań własnych układu napędowego («o) 111.
2. Praca sprzęgła z charakterystyką nieliniową przy obciążeniu okresowym. Zależnie od postaci siły dyssypacyjne w różny sposób wpływają na dynamikę układu mechanicznego, choć w zasadzie one wszystkie, a więc siły tarcia wewnętrznego i konstrukcyjnego, oporu wiskotycznego i tarcia kulombowskiego, są przyczyną tego samego efektu - dyssypacji energii. Wpływ tych sił na ruch układu ujawnia się w sposób widoczny zwłaszcza w przypadku drgań wymuszonych. a więc przy nieustalonych stanach pracy zespołu maszynowego. Siły dyssypacyjne powodują zanikanie drgań, wywołanych naruszeniem stanu ustalonego maszyny przez jej obciążanie lub odciążanie, rozruch silnika lub przejście od jednego ustalonego stanu pracy do innego. Znajomość sił dyssypacyjnych jest szczególnie ważna przy ocenie poziomu drgań rezonansowych. Poziom len wyznacza się. rozpatrując energię obciążenia zewnętrznego i sił dyssypacyjnych. Siły dyssypacyjne mogą także wywierać istotny wpływ na charakter drgań samowzbudnych układu.
W sprzęgłach podatnych z charakterystyką nieliniową łączniki są najczęściej wykonywane z elastomerów. Podstawową ich zaletą jest duża pętla histerezy odkształceniowej. a więc stosunkowo duży współczynnik tłumienia iy. który można uważać za współczynnik tłumienia wiskotycznego. Elementy elastomerowe zazwyczaj nie mają stałej sztywności i tłumienia. Sztywność sprzęgła c oraz tłumienie K0 są zależne od względnego kąta skręcenia członów sprzęgła <p oraz zmiany momentu wymuszającego v = 2tco), a także od nominalnego momentu obciążającego układ Mi. Wielkości te są dodatkowo uzależnione od kształtu łącznika i od gatunku elastomeru, z którego jest wykonany.
Wiele istotnych właściwości dynamicznych analizowanego układu można uzyskać przez badanie tzw. zlinearyzowanego modelu zachowawczego układu. Model ten otrzymuje się przez linearyzację nieliniowych charakterystyk członów sprężystych, polegającą na zastąpieniu nieliniowej charakterystyki M(ą>) charakterystyką liniową o postaci
M{ę) = Mfr+ć<p (1.100)
gdzie ć = (dM/dę)v~^, <po jest odkształceniem łącznika wywołanym działaniem stałego momentu średniego M<r.
Z matematycznego punktu widzenia linearyzacja polega na rozwinięciu funkcji M(<p) w szereg Taylora w otoczeniu punktu ą> = <po i uwzględnieniu tylko
55
Wyszukiwarka
Podobne podstrony:
3 (713) O Copyright by G. Olszyna Zadanie_222_2Q10 - Napędy Elektryczne Obliczenie momentu dynamiczn
222 10rr € Copyright by 6. Oteryna Zadanię_222_20I0 - Napędy Elektryczne Obliczenie momentu dynamicz
P1020667 (3) Współczynnik dynamiczny <p. - stosunek amplitudy drgań do wydłużenia statycznego. W
79801 P1020667 (3) Współczynnik dynamiczny <p. - stosunek amplitudy drgań do wydłużenia statyczne
DSCF4144 (126) Moment dynamiczny oblicza się ze wzoru gdzie J oznacza moment bezwładności. Moment be
HPIM5133 gdzie: fj - współczynnik przenoszenia, l. I2 - momenty bezwładności maszyny roboczej i
9 B ZAD 1. Obliczyć kinematyczny i dynamiczny współczynnik dyfuzji NH3 przez powietrze w temperaturz
P1040203 Pośrednie metody obliczani* zasobów dynamicznych gdzie: a> - wskaźnik infiltracji efekty
DSCF5196 (2) Obliczanie zasobów oksploalaeyjnych: ekspoatacp.a=(a+0)+7 Ę/Ę Gdzie: Od-zasoby dynamicz
skanuj0007 (309) WSPÓŁCZYNNIKI DO OBLICZANIA MOMENTÓW PRZY a/h - 3,0 bfh x/h y= = 0 y* a/4 y- a/2
kol 2 Kolokwium nr 1 z Dynamiki Budowli sem. 6-27 kwietnia 2004 ZADANIE 1. (30 pkt.) Obliczyć amplit
więcej podobnych podstron