HWScan00179
Dla małych koparek o ciężarze do 100 T stosuje się obok układów z podparciem trójpunktowym dwie gąsienice połączone sztywno. Układ trójpunktowy buduje się dla większych ciężarów, w celu lepszego rozkładu nacisków przy przemieszczaniu się środka ciężkości nadwozia podczas pracy.
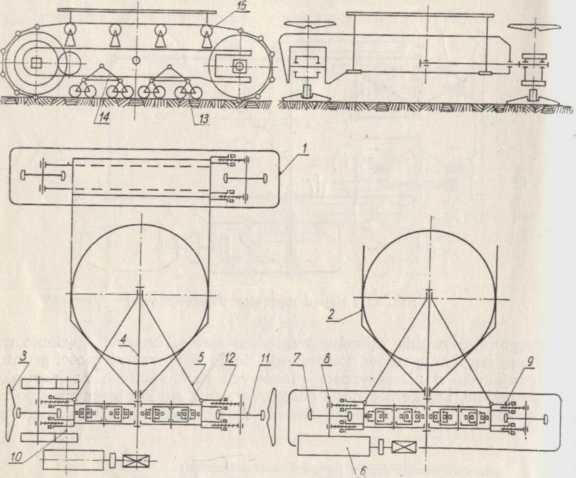
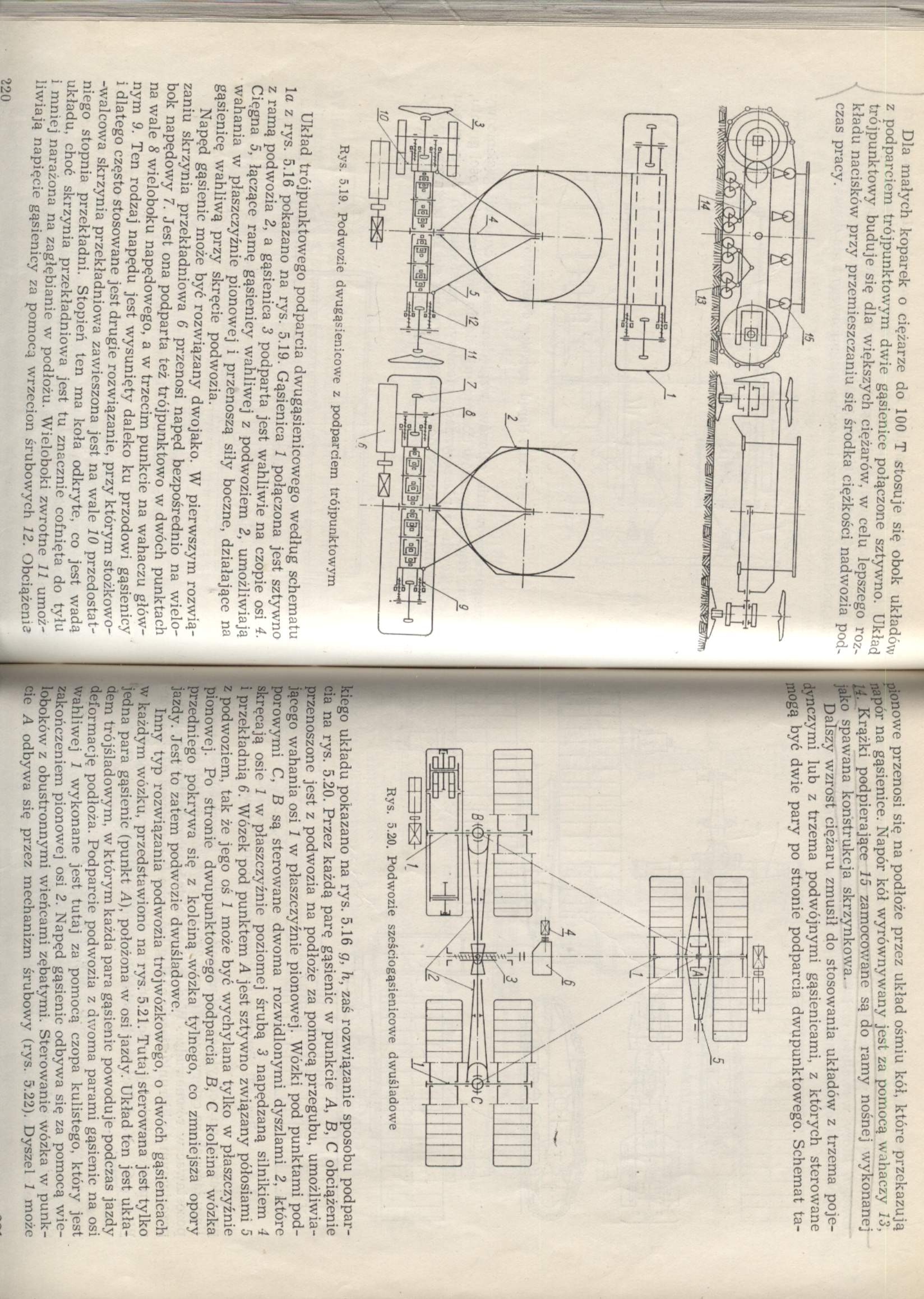
Rys. 5.19. Podwozie dwugąsienicowe z podparciem trójpunktowym
Układ trójpunktowego podparcia dwugąsienicowego według schematu la z rys. 5.16 pokazano na rys. 5.19. Gąsienica 1 połączona jest sztywno z ramą podwozia 2, a gąsienica 3 podparta jest wahliwie na czopie osi 4. Cięgna 5, łączące ramę gąsienicy wahliwej z podwoziem 2, umożliwiają wahania w płaszczyźnie pionowej i przenoszą siły boczne, działające na gąsienicę wahliwą przy skręcie podwozia.
Napęd gąsienic może być rozwiązany dwojako. W pierwszym rozwiązaniu skrzynia przekładniowa 6’ przenosi napęd bezpośrednio na wielo-bok napędowy 7. Jest ona podparta też trójpunktowo w dwóch punktach na wale 8 wieloboku napędowego, a w trzecim punkcie na wahaczu głównym 9. Ten rodzaj napędu jest wysunięty daleko ku przodowi gąsienicy i dlatego często stosowane jest drugie rozwiązanie, przy którym stożkowo--walcowa skrzynia przekładniowa zawieszona jest na wale 10 przedostatniego stopnia przekładni. Stopień ten ma koła odkryte, co jest wadą układu, choć skrzynia przekładniowa jest tu znacznie cofnięta do tyłu i mniej narażona na zagłębianie w podłożu. Wieloboki zwrotne 11 umożliwiają napięcie gąsienicy za pomocą wrzecion śrubowych 12. Obciążenia
pionowe przenosi się na podłoże przez układ ośmiu kół, które przekazują na pór na gąsienice. Napór kół wyrównywany jest za pomocą wahaczy 13, Ut Krążki podpierające 15 zamocowane są do ramy nośnej wykonanej jako spawana konstrukcja skrzynkowa.
Dalszy wzrost ciężaru zmusił do stosowania układów z trzema pojedynczymi lub z trzema podwójnymi gąsienicami, z których sterowane mogą być dwie pary po stronie podparcia dwupunktowego. Schemat ta-

Rys. 5.20. Podwozie sześciogąsienicowe dwuśladowe
kiego układu pokazano na rys. 5.16 g, h, zaś rozwiązanie sposobu podparcia na rys. 5.20. Przez każdą parę gąsienic w punkcie A, B, C obciążenie przenoszone jest z podwozia na podłoże za pomocą przegubu, umożliwiającego wahania osi 1 w płaszczyźnie pionowej. Wózki pod punktami podporowymi C, B są sterowane dwoma rozwidlonymi dyszlami 2, które skręcają osie 1 w płaszczyźnie poziomej śrubą 3 napędzaną silnikiem 4 i przekładnią 6. Wózek pod punktem A jest sztywno związany półosiami 5 z podwoziem, tak że jego oś 1 może być wychylana tylko w płaszczyźnie pionowej. Po stronic dwupunktowego podparcia B, C koleina wózka przedniego pokrywa się z koleiną wózka tylnego, co zmniejsza opory jazdy. Jest to zatem podwozie dwuśladowe.
Inny typ rozwiązania podwozia trójwózkowego, o dwóch gąsienicach w każdym wózku, przedstawiono na rys. 5.21. Tutaj sterowana jest tylko jedna para gąsienic (punkt A), położona w osi jazdy. Układ ten jest układem trójśladowym, w którym każda para gąsienic powoduje podczas jazdy deformację podłoża. Podparcie podwozia z dwoma parami gąsienic na osi wahliwej 1 wykonane jest tutaj za pomocą czopa kulistego, który jest zakończeniem pionowej osi 2. Napęd gąsienic odbywa się za pomocą wie-loboków z obustronnymi wieńcami zębatymi. Sterowanie wózka w punkcie A odbywa się przez mechanizm śrubowy (rys. 5.22). Dyszel 1 może
Wyszukiwarka
Podobne podstrony:
12 I. Bajki dla małych dzieci - Chodź do drugiego pokoju - powiedział Szczur Stano
Uli Frezy - Piły - Obróbka CNC Smart SetTools Igtt Nowe narzędzia dla małych i średnich firm&nb
Uli Frezy - Piły - Obróbka CNC Smart SetTools Igtt Nowe narzędzia dla małych i średnich firm&nb
374 SPRAWOZDANIE Z RUCHU RELIGIJNEGO, kol. łódzkiej, do której stosuje się podwyższona taryfa Nr. 6)
374 SPRAWOZDANIE Z RUCHU RELIGIJNEGO, kol. łódzkiej, do której stosuje się podwyższona taryfa Nr. 6)
374 SPRAWOZDANIE Z RUCHU RELIGIJNEGO, kol. łódzkiej, do której stosuje się podwyższona taryfa Nr. 6)
74445 img027 (4) rażanej w języku polskim przy pomocy przyimka do: „coś stosuje się do czegoś”: masz
Str 5 Nazewnictwo alkinów Do alkinów stosuje się ogólne zasady nazewnictwa węglowodorów. W nazewnict
2 (2173) Metodę klasyczną (tradycyjną) odlewania stali do wlewnic stosuje się obecnie w przypadku :
ZAŁĄCZNIKI: Energia a środowisko MATERIAŁY DLA NAUCZYCIELID. Energia biomasy Do biomasy zalicza się
26. Przepisy od p. 19 do p.25 stosuje się odpowiednio w przypadku rocznej (semestr
DSC00208 (18) Zewnętrzne okładziny kamienne • Do licowania stosuje się: piaskowce,
dsc00522 (6) Zależnie od zakresu temperatur, dla których przewidziany jest termo-element, stosuje si
Zamówienia publiczne, do których stosuje się przepisy ustawy - A a A Prawo zamówień
CCF20110902�007 próbki do roztworu -stosuje sie mineralizacje czego efektem jest rozkład próbki i ut
więcej podobnych podstron