3582284659
4.7 Projektowanie uktadów sterowania sekwencyjnego 255
4.7 Projektowanie uktadów sterowania sekwencyjnego 255
Blok:
FC1
Tryb pracy
Obwód:
Automatyka
|
I 0.1 —O |
>1 |
M2.1 | |
|
I 0.4—q |
I 0.0 — |
S SR | |
|
I 0.5 —c |
R Q |
Etap początkowy
Obwód:
M2.2
I 0.3-
|
& |
= | |
1. Wybór trybu pracy za pomocą przerzutnika SR: automatyczny (M 2.1 = 1) - przez wciśnięcie przycisku załączania S1 = I 0.0 (wejście Set) oraz ręczny (M 2.1 = 0) - za pomocą funkcji OR, której jednym z argumentów jest styk przycisku wyłączania S2 = I 0.1. Pozostałymi argumentami funkcji OR są stany styków F1 i F2, odpowiadające awaryjnej sytuacji przegrzania silników. Wszystkie wejścia funkcji OR są zanegowane z tego powodu, aby kasowanie przerzutnika SR następowało przez rozwieranie styków, co zwiększa bezpieczeństwo w stanach awaryjnych,
Obwód:
Spuszczanie (arby
2. Aktywowanie kroku inicjacyjnego markerem M 2.2, który jest ustawiony przy pustym zbiorniku.
Rys. 1. Blok Trybu Pracy
W tej sytuacji, ze względów bezpieczeństwa, styk S4 = I 0.3 musi być rozwarty, a zatem sygnał ten musi zostać zanegowany. Oczywiście po rozpoczęciu napełniania zbiornika marker M 2.2 zostaje wyzerowany,
Blok:
Obwód:
FC2
Sekwencja dziatań
Etap 1: Pompowanie
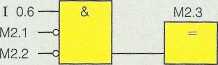
3. Żądanie opróżnienia zbiornika markerem M 2.3, który jest ustawiony podczas wciśnięcia i przytrzymania przycisku S5 (I 0.6). Jednocześnie muszą być spełnione jeszcze dwa warunki: wybranie trybu pracy ręcznej i brak aktywności kroku inicjacyjnego. Stąd też wynika użycie w programie trójargumentowej funkcji AND.
Obwód:
Etap 2: Mieszanie
Czas mieszania
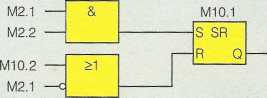
Blok Sekwencji Dziatań (FC2) steruje przebiegiem trzech podstawowych etapów algorytmu sterowania: „Pompowaniem”, „Mieszaniem” i „Spuszczaniem” za pomocą trzech markerów M10.1, M10.2 oraz M10.4, które zostały przypisane do przerzutni-ków SR (rys. 2):
Obwód:
M10.2
|
& |
T1 | |
|
SD | ||
|
S5T#10S —-| |
TV | |
• marker M10.1 („Pompowanie”) zostaje ustawiony przez koniunkcję markera M 2.2 (pusty zbiornik) i markera M 2.1 (włączony tryb pracy automatycznej). Jest on zerowany po napełnieniu zbiornika, tzn. po spełnieniu warunku przejścia do etapu „Mieszanie" (M10.2) lub gdy wyłączony zostanie tryb pracy automatycznej (zanegowany marker M 2.1),
Obwód:
Etap 3: Spuszczanie
Rys. 2. Blok Sekwencji Działań
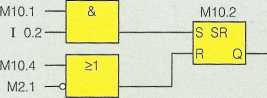
• marker M10.2 („Mieszanie") zostaje ustawiony przez koniunkcję markera M10.1 (aktywny etap „Pompowanie") i sygnału I 0.2 (zbiornik napełniony). Jest on zerowany po spełnieniu warunku przejścia do etapu „Spuszczanie" (M10.4) lub gdy wyłączony zostanie tryb pracy automatycznej (zanegowany marker M 2.1),
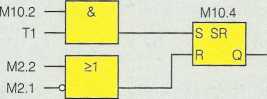
• marker M10.4 („Spuszczanie") zostaje ustawiony przez koniunkcję markera M10.2 (aktywny
etap „Mieszanie") i upływ czasu mieszania T1 = 10 s (T1). Jest on zerowany po osiągnięciu etapu początkowego, tzn. po opróżnieniu zbiornika (M 2.2) lub gdy wyłączony zostanie tryb pracy automatycznej (zanegowany marker M 2.1). Rozpoczęcie odmierzania czasu T1 = 10 uaktywnia marker M10.2, tzn. aktywny etap „Mieszanie".
Wyszukiwarka
Podobne podstrony:
254 4.7 Projektowanie układów sterowania sekwencyjnego Wykonywanie programu sterownik rozpoczyna od
IMAG0064 TEORIA STEROWANIA Wielowymiarowe układy sterowania Ćwiczenie laboratoryjne nr 4 Projektowan
Image188 Sterowniki projektowane z wykorzystaniem układów FPLA Układy FPLA mogą być wykorzystane do:
Komputerowe systemy sterowania Absolwent specjalności nabywa umiejętności analizy, projektowania i
J (WEIT III Przegląd projektów. Wybrane zagadnienia w sterowaniu sprzęgów
y u]
ZADANIE PROJEKTOWE NR 2Projektowanie układu sterowania typu: Bang-Bang w środowisku Stateflow/Simuli
ZADANIE PROJEKTOWE NR 4Modelowanie i projektowanie układu sterowania dla wybranego systemu automatyz
Spis treści Projektowanie układu sterowania podgrzewaczem wody z wykorzystaniem modułu
ZADANIE PROJEKTOWE NR 1Projektowanie układu sterowania podgrzewaczem wody z wykorzystaniem modułu St
Mirosław Luft
- PROJKETY STATKÓWStatek Re-Volt - kontenerowiec zdalnie sterowany (Norwegia) Projektowany od 2017 r
IMAG0064 TEORIA STEROWANIA Wielowymiarowe układy sterowania Ćwiczenie laboratoryjne nr 4 Projektowan
napędy i sterowanie Część mechaniczną projektu wykonano z powszechnie dostępnych materiałów,
Projekty badawcze 17. Równoległe algorytmy automatycznej hp adaptacji sterowane gramatyką
Wprowadzenie do robotyki Robotyka to nauka i technologia projektowania, budowy i zastosowania sterow
2.Sterownik prądu przemiennego 1 fazowy ze sterowaniem impulsowym i obciążeniu RL. Projekt i budowa
Praca obejmuje wykonanie projektu układu sterowania cyfrowego analogowym modelem obiektu fizycznego.
więcej podobnych podstron