1109145108
Ta wartość częstotliwości u> jest nazywana wartością własną. Rozpatrzmy teraz drgania tej masy wymuszone przez siłę okresową P = Po sin pt. Równanie (1) musimy zasąpić następującym
d?x
~ ~^x + po sin pt. (4)
Rozwiązanie szczególne tego równania różniczkowego jest następujące
x =
Po
k — mp2
sin pt —

i
i-4'
Funkcja / jest przedstawiona na Rys. 01.
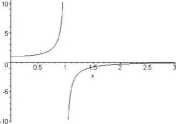
Rys. 01: Amplituda drgań wymuszonych sprężyny: x — p/ui.
Jest oczywiste, że wartość amplitudy drgań wzrasta w sposób nieograniczony, gdy wartość częstotliwości zbliża się do wartości własnej. Ten efekt nazywamy rezonansem.
Zwykle obciążenia dynamiczne nie mają prostej postaci harmonicznej, występującej w powyższym przykładzie. W wielu problemach praktycznych daje się je jednak przedstawić w postaci superpozycji wielu, czasem nieskończenie wielu, funkcji harmonicznych. Obciążenie jest wtedy charakteryzowane zbiorem wielu częstotliwości. Ten zbiór nazywamy widmem. Jeśli częstotliwość własna należy do tego zbioru to musi się pojawić zjawisko rezonansu.
Celem tych wykładów jest analiza tych problemów zarówno dla układów o skończonej, jak i o nieskończonej (tzw. układów ciągłych) ilości stopni swobody.
1.2 Dynamiczne stopnie swobody, więzy odkształcalne
Stan przemieszczenia elementów konstrukcji opisujemy w dynamice, podobnie jak w zagadnieniach statycznych, przy pomocy zbioru pewnych współrzędnych uogólnionych. Liczba niezależnych współrzędnych uogólnionych, niezbędnych do określenia chwilowej konfiguracji konstrukcji nazywa się liczbą dynamicznych stopni swobody d. Jak wiadomo z mechaniki ogólnej, punkt materialny ma w przestrzeni trzy stopnie swobody, na płaszczyźnie - dwa stopnie swobody, tarcza sztywna w ruchu płaskim ma trzy stopnie swobody, bryła sztywna w przestrzeni ma sześć stopni swobody, itd. Te elementy, wchodzące w skład modelu ustroju budowlanego są powiązane z ostoją (podpory), a między sobą - więzi-ami. Te ostatnie mogą być odkształcalne i wtedy nie zmieniają liczby dynamicznych stopni swobody, lub też nieodkształcalne, przez co nakładają na układ więzy kinematyczne. Liczba dynamicznych stopni swobody układu złożonego jest równa sumie lokalnych stopni swobody pomniejszonej o liczbę ograniczeń, wynikających z więzów.
3
Wyszukiwarka
Podobne podstrony:
genogram Genogram Metoda ta bardzo często jest stosowana w psychiatrii. Jest to schemat podobny do d
115 NAUKOWEGO I SPOŁECZNEGO 40 Kor.; wysokość ta jednak często jest przekroczony wobec większej potr
NDIGDRUK005727�72 djvu 62 przez otrzewną niezupełnie pizykrytą. Część ta bardzo często jest siedlisk
Strona0060 602.8. Drgania wymuszone tłumione Rozpatrzymy teraz drgania układu mechanicznego pokazane
Strona0132 132 Rozpatrzmy teraz drgania układu (rys. 6.2), gdy na masy działają dwie siły 0
1tom197 7. ELEKTRONIKA396 Phase-Locked Loop). Miarą stabilności częstotliwości jest wartość względna
więcej podobnych podstron