4544138979
< 19 >
> Treści multimedialne - kodowanie, przetwarzanie, prezentacja
mają charakterystykę dwukierunkową (ósemkową). W tych mikrofonach mierzony jest gradient (różnica) ciśnień pomiędzy dwiema stronami membrany (rys. 12b).
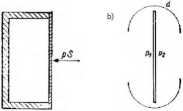
Rysunek 12.
Zasada działania mikrofonu ciśnieniowego a) i gradientowego b)
Mikrofony ciśnieniowo-gradientowe są połączeniem mikrofonu gradientowego i ciśnieniowego. Ich charakterystyka kierunkowa zawiera się pomiędzy ósemką a kołem. Szczególnie popularną grupą tego typu mikrofonów są mikrofony o charakterystyce kardioidalnej.
2.1.2 PODZIAŁ MIKROFONÓW ZE WZGLĘDU NA RODZAJ PRZETWORNIKA (PODZIAŁ ELEKTRYCZNY)
W mikrofonach magnetoelektrycznych (dynamicznych) wykorzystuje się zjawisko indukcji magnetycznej. Do membrany jest przyklejona lekka cewka umieszczona w szczelinie magnesu trwałego. Podczas drgań membrany mikrofonu, w uzwojeniu cewki indukuje się siła elektromotoryczna o częstotliwości równej częstotliwości drgań membrany. Mikrofony dynamiczne można podzielić na:
■ cewkowe - fala akustyczna oddziałuje na membranę połączoną z cewką, umieszczoną w polu magnesu trwałego. Drgania cewki powodują powstanie zmiennego sygnału elektrycznego proporcjonalnego do zmian padającej fali (rys. 13a).
a wstęgowe - padająca fala akustyczna pobudza do drgań wstęgę umieszczoną w polu magnetycznym, co powoduje powstanie proporcjonalnego do niej sygnału elektrycznego (rys. 13b).
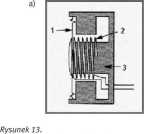
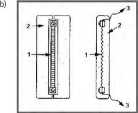
Mikrofony dynamiczne: a) cewkowe 1 - membrana 2 - cewka 3 - magnes: b) wstęgowe 1 - wstęga 2 - magnes 3 - transformator
W przypadku mikrofonu pojemnościowego membrana oraz tylna elektroda są naładowane elektrostatycznie. Drgania membrany powodują zmiany napięcia pomiędzy nią i drugą elektrodą, proporcjonalnie do padającej fali. W zależności od sposobu polaryzacji elektrod wyróżniamy mikrofony: z polaryzacją zewnętrzną oraz z polaryzacją wewnętrzną (elektretowe).
Mikrofony pojemnościowe (rys. 14a) mają małe wymiary i masę, prostą budowę i małą wrażliwość wstrząsy. Wychylenia membrany tych mikrofonów są bardzo małe - dochodzą najwyżej do kilku tysięcz-
Wyszukiwarka
Podobne podstrony:
<9>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja ność rozróżniania pewnych
<U>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja Rysunek 8. Addytywne a) i
<13>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja m Panning - umożliwia
<15>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja Czerwień i niebieski zna
<17>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja nych, w pełni interaktyw
Treści multimedialne - kodowanie, przetwarzanie, prezentacja Andrzej Majkowski Politechnik
<5>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja Spis treści 1.
<7>> Treści multimedialne - kodowanie, przetwarzanie, prezentacja Bardzo często w celu anal
Rodzaj zajęć: Wszechnica Informatyczna Tytuł: Treści multimedialne - kodowanie, przetwarzanie,
CCF20111211�056 treści, które mają charakter tutorialu (zarówno samodzielne — popr ogle czy YouTube,
Chemia w medycynie SU ag y<e
Prace magisterskie mają charakter teoretyczno-empiryczny. Uczestnicy seminarium prezentują w swojej
Zdj?cie0880 PRZETWARZANIE I PREZENTACJA ANTYGENU Z UDZIAŁEM MHC KLASY I Peptydy prezentowane na
Zdj?cie0883 PRZETWARZANIE I PREZENTACJA ANTYGENU Z UDZIAŁEM MHC KLASY II • cząstec
więcej podobnych podstron