30945
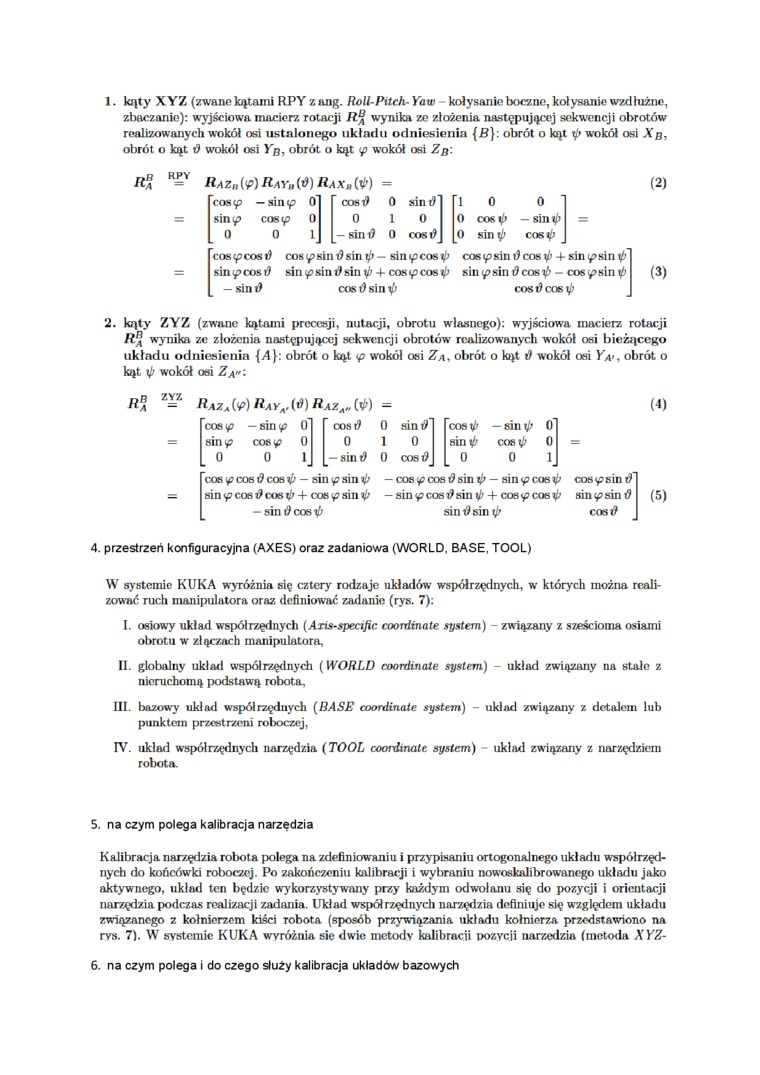
1. kąty X YZ (zwane kątami RPY z ang. Roll-Pitch- Yaw kołysanie boczne, kołysanie wzdłużne, zbaczanie): wyjściowa macierz rotacji R.% wynika ze złożenia następującej sekwencji obrotów realizowanych wokół osi ustalonego układu odniesienia {/?}: obrót o kąt tp wokół osi obrót o kąt t? wokół osi Yg, obrót o kąt wokół osi Zg.
fi? *= Raz„(v)Ray„{<»RaxM) =
|
cosę? |
— sinę? |
0' |
COSI? |
0 |
sini? |
1 |
0 |
0 | |||
|
= |
sini,? |
cos tp |
0 |
0 |
I |
0 |
0 |
cos tp |
— sin tp | ||
|
0 |
0 |
1 |
- sini? |
0 |
COSI? |
0 |
sin tp |
costp |
cos^cosi? cos ip sin d sin tp — sin tp cos ip cos ip sin i? cos tp 4- sin tp sin tp siny?cost? sin <p sini? sin tp + cos tp cos tp sin y? sini? cos ^ - cosy?sin0 -sini? cos d sin ^ co&dcostp
(3)
2. kąty ZYZ (zwane kątami precesji, notacji, obrotu własnego): wyjściowa macierz rotacji /?4 wynika zc złożenia następującej sekwencji obrotów realizowanych wokół osi bieżącego układu odniesienia {j4}: obrót o kąt y? wokół osi Za, obrót o kąt d wokół osi Ya>, obrót o kąt tp wokół osi Za*-
(4)
(5)
RB ZYZ
Raza(v) RayA'W) raza„ (tp) =
|
COS ifi |
— sin^J |
0' |
COSI? |
0 |
sini? |
cos tp |
— sin tp |
0' | ||
|
sin tp |
cos p |
0 |
0 |
1 |
0 |
sin tp |
cos ip |
0 | ||
|
0 |
0 |
1 |
— sini? |
0 |
COSI? |
0 |
0 |
1 |
costp cosi?costp - siny?sintp — cos <pcos Osin ip — sintpcoaip cos ^ sin t) sin^eoetfeos^ + cos^sin^ — sin ^ cos i? sin 0 + costpcostp sinysini? -sini? cos tp sint?sinV' cosi?
4. przestrzeń konfiguracyjna (AXES) oraz zadaniowa (WORLD, BASE, TOOL)
W systemie KUKA wyróżnia się cztery rodzaje układów współrzędnych, w których można realizować ruch manipulatora oraz definiować zadanie (rys. 7):
I. osiowy układ współrzędnych (Aiis-specific coordinate system) - związany z sześcioma osiami obrotu w złączach manipulatora,
II. globalny układ współrzędnych (WORLD coordinate system) - układ związany na stale z nieruchomą podstawą robota,
III. bazowy układ współrzędnych (BASE coordinate system) - układ związany z detalem lub punktem przestrzeni roboczej,
IV. układ współrzędnych narzędzia (TOOL coordinate system) układ związany z narzędziem robota.
5. na czym polega kalibracja narzędzia
Kalibracja narzędzia robota polega na zdefiniowaniu i przypisaniu ortogonalnego układu współrzędnych do końcówki roboczej. Po zakończaniu kalibracji i wybraniu now'oskalibrowanego układu jako aktywnego, układ ten będzie wykorzystywany przy każdym odwolanu się do pozycji i orientacji narzędzia podczas realizacji zadania. Układ współrzędnych narzędzia definiuje się względem układu związanego z kołnierzem kiści Tobota (sposób przywiązania układu kołnierza przedstawiono na rys. 7). W systemie KUKA wryróżnia sie dwie metody kalibracji pozycji narzędzia (metoda XYZ-
6. na czym polega i do czego służy kalibracja układów bazowych
Wyszukiwarka
Podobne podstrony:
Kinematyka manipulatora przemysłowego Kąty XYZ • Kąty XYZ (zwane kątami RPY z ang. Roll-Pitch-Yaw —
56616 img026 (6) Elementy takiej złożonej kategorii (zwane węzła-mi; ang. nodes) są ze sobą powiązań
1. Warto powtórzyć - kąty i ich własności Kąty. które min równe miary, nazywamy katami rumii mi.
IMGP1839 Uzależnienie fizjologiczne (ang. physiological dependence), zwane też czasem fizycznym, to&
Rys. 7. Kąty w płaszczyźnie P0 Pomiędzy tymi kątami występuje zależność: y0 + a0 + 3o = 90°. Wszystk
skanuj0011 (330) miasta człowieka zwane «duszą» i «bytem» zostaną zdekonstruowane”. Ma to być już ni
więcej podobnych podstron