41966
Najczęściej sieci neuronowe są realizowane jako modele matematyczne lub symulacyjne, do czego budowane są niekiedy specjalne komputery (np. procesor DELTA firmy SAIC) albo systemy komputerowe specjalnie dostosowane do wykorzystania w pracach nad sieciami. Badane są także specjalne zasady budowy algorytmów dla sieci neuronowych oraz tworzone jest specjalne oprogramowanie dla potrzeb modelowania sieci. W naszym ćwiczeniu wykorzystujemy profesjonalny program, który składa się z dwóch części: NetMakera i BrainMakera. B rai n\l a ker jest programem do symulacji sieci neuronowych pracującym w systemie MS-WINDOWS z szybkością S^IO5 p/s. Zawiera 5 typów elementów (neuronów)
Neurony.
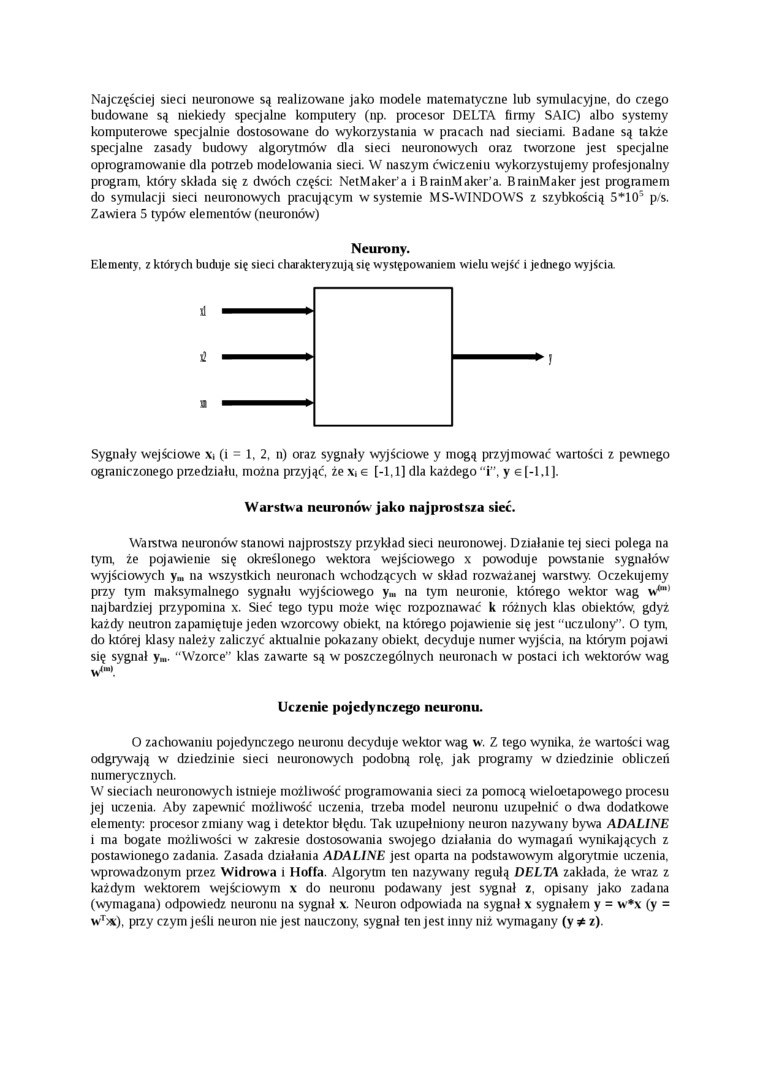
Elementy, z których buduje się sieci charakteryzują się występowaniem wielu wejść i jednego wyjścia.
ll
i
a
Sygnały wejściowe Xi (i = 1. 2. n) oraz sygnały wyjściowe y mogą przyjmować wartości z pewnego ograniczonego przedziału, można przyjąć, że Xi € [-1,11 dla każdego “i”, y e [-1.1 ].
Warstwa neuronów jako najprostsza sieć.
Waistwa neuronów stanowi najprostszy przykład sieci neuronowej. Działanie tej sieci polega na tym, że pojawienie się określonego wektora wejściowego x powoduje powstanie sygnałów wyjściowych y„, na wszystkich neuronach wchodzących w skład rozważanej warstwy. Oczekujemy przy tym maksymalnego sygnału wyjściowego yro na tym neuronie, którego wektor wag w*"" najbardziej przypomina x. Sieć tego typu może więc rozpoznawać k różnych klas obiektów, gdyż każdy neutron zapamięnije jeden wzorcowy obiekt, na którego pojawienie się jest “uczulony”. O tym, do której klasy należy zaliczyć aktualnie pokazany obiekt, decyduje numer wyjścia, na którym pojawi się sygnał ym. “Wzorce” klas zawarte są w poszczególnych neuronach w postaci ich wektorów wag W"'.
Uczenie pojedynczego neuronu.
O zachowaniu pojedynczego neuronu decyduje wektor wag w. Z tego wynika, że wartości wag odgrywają w dziedzinie sieci neuronowych podobną rolę, jak programy w dziedzinie obliczeń numerycznych.
W sieciach neuronowych istnieje możliwość programowania sieci za pomocą wieloetapowego procesu jej uczenia. Aby zapewnić możliwość uczenia, trzeba model neuronu uzupełnić o dwa dodatkowe elementy: procesor zmiany wag i detektor błędu. Tak uzupełniony neuron nazywany bywa ADALINE i ma bogate możliwości w zakresie dostosowania swojego działania do wymagań wynikających z postawionego zadania. Zasada działania ADA LINĘ jest oparta na podstawowym algorytmie uczenia, wprowadzonym przez Widrowa i Hoffa. Algorytm ten nazywany regułą DELTA zakłada, że wraz z każdym wektorem wejściowym x do neuronu podawany jest sygnał z, opisany jako zadana (wymagana) odpowiedz neuronu na sygnał x. Neuron odpowiada na sygnał x sygnałem y = w*x (y = wT>x), przy czym jeśli neuron nie jest nauczony, sygnał ten jest inny niż wymagany (y * z).
Wyszukiwarka
Podobne podstrony:
237 (3) 237 proces symulacji odpowiedniej sieci neuronowej. Są one zawarte w katalogu NEURALEX i pok
1. Inteligencja sztuczna 2. Modele matematyczne 3. Sterowanie 4. Symulacja 5. Teoria systemów 6. Dok
- rozmowę kwalifikacyjną z matematyki lub chemii - do wy boru przez kandydata. Ze
REKRUTACJAMATURA - Z CZEGO? Zdaj dobrze egzamin maturalny z dwóch przedmiotów: matematyki lub geogra
skanuj0002 69 definiowany jest jako (...) miejsce do którego się zmierza lub „to, do czego ląży, co
P1080342 (2) 10. Sztuczna inteligencja w robotyce jest realizowanych jako sztuczne sieci neuronowe.
img176 (9) 170 Sieci neuronowe samouczące się tuje w każdym kolejnym kroku obraz, na którym widoczne
img202 (5) 196 Sieci neuronowe samouczące się (i tylko jego!) współczynniki wagowe są zmieniane, prz
img020 20 2.5. Narzędzia realizacji sieci neuronowych oryginalne podejście do zagadnień modelowania,
img022 22 2.5. Narzędzia realizacji sieci neuronowych ExploreNet — pakiet programów modelujący 19 ró
img024 24 2.5. Narzędzia realizacji sieci neuronowych Delta Applications Iuterface 1016 — 16 buforow
img026 26 2.5. Narzędzia realizacji sieci neuronowych NeuralWare — NeuralWare, Inc. Penn Center West
img095 95 7.4. Sieci neuronowe a ostatnią pochodną obliczymy jako dQk _ dQt de _ dQt dij dekx _ dQk
opis modelu w postaci „czarnej skrzynki”. Uczenie sieci neuronowej może być także realizowane w trak
więcej podobnych podstron