60615
wolnym miejscu oceanu światowego z kilkusetmetrową niepewnością. Na lądzie stałym jedno-dwudobowe rejestracje prowadzone przez nieruchomy odbiornik już połowie lal 70-tych XX w. pozwalały na wyznaczenie jego pozycji w każdych warunkach pogodowych z kilkumetrowym błędem (a więc była to dokładność porównywalna z dokładnością wyznaczeń astronomicznych, jednakże wolna od wpływu lokalnych odchyleń pionów), ale już różnica pozycji dwóch odbiorników, wyznaczana symultanicznym pomiarem, była obarczona błędem rzędu I - 2 m niezależnie od tego. czy odbiorniki były odległe od siebie o kilka metrów czy kilkaset kilometrów.
Systemy dopplcrowskie umożliwiły wystarczająco precyzyjną nawigację flot. mogły wspomagać siły lądowe, jednakże - z powodu długiego czasu potrzebnego do zebrania niezbędnej ilości danych - całkowicie nic odpowiadały potrzebom lotnictwa i wojsk rakietowych. W zastosowaniach cywilnych zrewolucjonizowały geodezję wyższą, umożliwiły precyzyjne wzajemne nawiązanie odległych wysp i kontynentów, a także wyznaczenie parametrów kształtu Ziemi z nieosiągalną wcześniej dokładnością. Opracowany w latach 60-tych w USA system TRANSIT i niewiele późniejsza radziecka TSIKADA („Cykada") zostały w latach 70-iych udostępnione użytkownikom cywilnym. Pozostały w użyciu niemal do końca XX w., stopniowo ustępując miejsca dopiero systemom typu GNSS.
3. NAVSTAR GPS - początki.
Systemy hiperboliczne i dopplerowskie oraz wspomagające je systemy bezwładnościowe (nie omawiane w tym kursie, wykorzystujące przyspieszeniomierze i żyrokompasy) nie zaspokajały potrzeb ani sił zbrojnych USA. ani użytkowników cywilnych. Z tego powodu lotnictwo, marynarka i wojska lądowe próbowały już w latach 60-tych XX w. budować własne systemy nawigacji satelitarnej. Poszukiwanie oszczędności wymusiło połączenie sił. doświadczeń i celów w jeden wspólny program. W pierwszy weekend września 1973 roku zebrał się zespól Joint Program Office (Biuro Programu Wspólnego), którego uczestnicy, przedstawiciele wszystkich rodzajów sił zbrojnych USA oraz NATO i pracujących dla wojska placówek badawczych, także cywilnych, podjęli fundamentalne decyzje określające przyszły system nawigacji satelitarnej. Przede wszystkim sformułowano warunki, jakie nowy system miał spełniać:
a) dostępność nieprzerwanie na całej kuli ziemskiej (24h/7d. 360o/±90p).
b) dostępność w każdych warunkach atmosferycznych.
c) umożliwienie trafienia 5 bomb i pocisków, zrzucanych lub wystrzeliwanych z różnych platform, w koło o średnicy 10 m.
d) koszt pojedynczego odbiornika poniżej 10 tyś. USD (w cenach 1973 r.: ostatnie zdanie mieli księgowi...).
Podejmując decyzję o budowie systemu GPS spełniającego te warunki, wykorzystano dotychczasowe doświadczenia: z systemu TRANSIT przejęto metody predykcji parametrów orbit, sposób eliminacji wpływu jonosfery oraz -ważne na tym pionierskim etapie! - przekonanie o wykonalności i sensowności całego zadania. Budowane przez marynarkę satelity TIMATION wniosły doświadczenie z pracą zegarów atomowych w przestrzeni kosmicznej, a ostatni z tych satelitów - NTS-II (zwany też Timation III) - posłużył do pierwszych testów praktycznych. Z programu 621B lotnictwa przejęto projekt konstelacji oraz doświadczenie z pomiarami odległości do satelitów za pomocą fal radiowych modulowanych specjalnymi, binarnymi pseudolosowymi kodami, zdefiniowanymi w taki sposób, że wszystkie satelity mogły pracować na tej samej częstotliwości fali nośnej. W uproszczeniu możemy przyjąć, źc kody niosą wskazania zegara satelity.
Projekt uzyskał ostateczną akceptację Departamentu Obrony USA (DoD) 17 grudnia 1973 r. i został skierowany do realizacji. Pełną operacyjność osiągnął w styczniu 1994 roku i od tego czasu pracuje nieprzerwanie.
W wyniku decyzji podjętych w'e wrześniu 1973 r. podstawową techniką nawigacyjną systemu NAVSTAR GPS (.J9AVSTAR the Global Positioning System"), służącą wyznaczeniu pozycji użytkownika, jest jednokierunkowy, fazowy pomiar odległości od (przynajmniej) czterech satelitów o znanych pozycjach.
4. GNSS - wyznaczenie pozycji nawigacyjnej
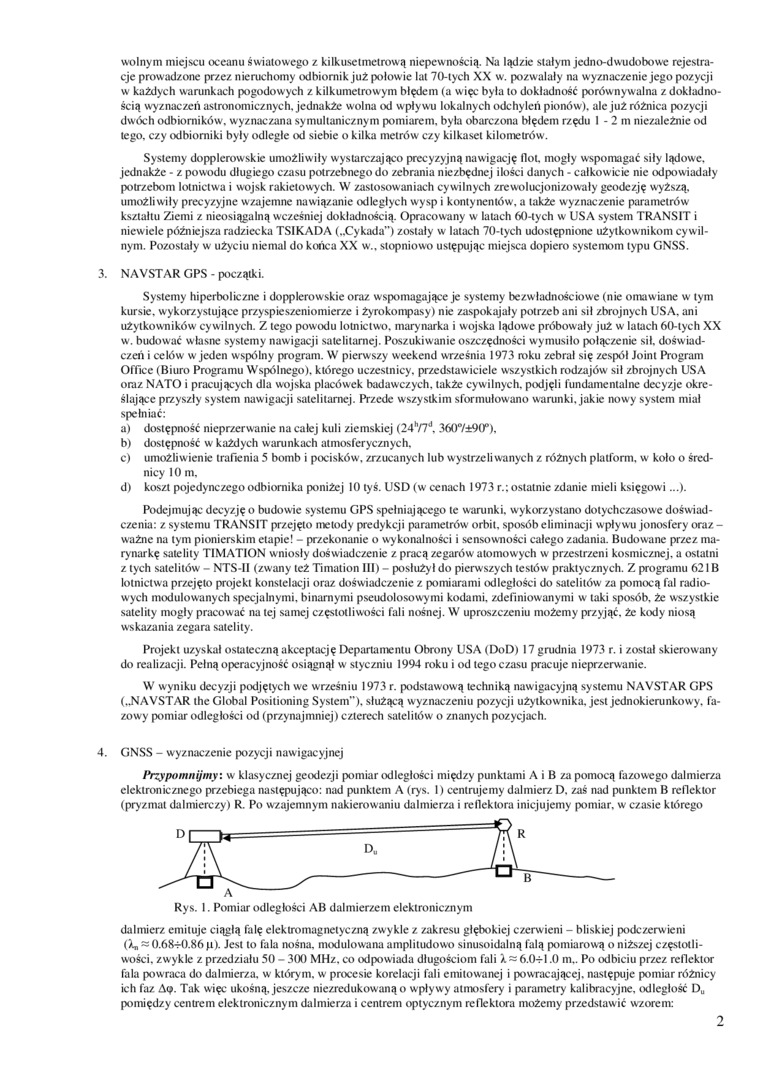
Przypomnijmy: w klasycznej geodezji pomiar odległości między punktami A i B za pomocą fazowego dalmierza elektronicznego przebiega następująco: nad punkiem A (rys. I) centrujemy dalmierz D. zaś nad punktem B reflektor (pryzmat dalmierczy) R. Po wzajemnym nakierowaniu dalmierza i reflektora inicjujemy pomiar, w czasie którego
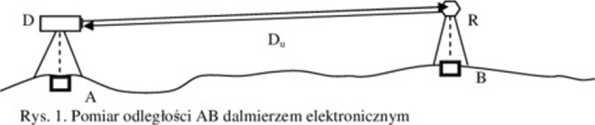
dalmierz emituje ciągłą falę elektromagnetyczną zwykle z zakresu głębokiej czerwieni - bliskiej podczerwieni (X„~ 0.68+0.86 p). Jest to fala nośna, modulowana amplitudowo sinusoidalną falą pomiarową o niższej częstotliwości. zwykle z przedziału 50 - 300 MHz. co odpowiada długościom fali X ~ 6.0+1.0 m.. Po odbiciu przez reflektor fala powraca do dalmierza, w którym, w procesie korelacji fali emitowanej i powracającej, następuje pomiar różnicy ich faz A<j. Tak więc ukośną, jeszcze niezredukowanąo wpływy atmosfery i parametry kalibracyjne, odległość Du pomiędzy centrem elektronicznym dalmierza i centrem optycznym reflektora możemy przedstawić wzorem:
2
Wyszukiwarka
Podobne podstrony:
DSC06351 Metody badań dna oceanu i złóż kopalin 61 a - na lądzie; b - z mola; c - z platformy samopo
wolne dni od pracy. Na północ od Long Island, oddzielona fcast Riuer, na lądzie stałym leży dzielnic
page0197 NAZWY MIEJSCOWE Z okresu pierwszych kilkuset lat słowiańskiego osadnictwa na ziemiach polsk
Zadanie 5. Zadanie wykonaj na podstawie mapy temperatury wód powierzchniowych oceanu światowego (str
rcheologiczny Termin: 15-16.05.2020 Miejsce i godzina: do uzgodnienia (koniecznie na wolnym
na której znaleźć można ogłoszenia prywatnych osób dysponujących wolnymi miejscami w samochodzie/bil
skanuj0038 (41) •SU Koncepcje człowieka w socjologii typu miejsca publiczne, w tym zwłaszcza instytu
Zdjęcie0842 (2) Przykładem związku ulegającego kilkustopniowemu rozpadowi na jony może być kwas fosf
113 gdy się jest choć trochę spoconym, w miejscu otwartem, pozapinać się, wdziać na siebie serd
skanuj0038 (41) •SU Koncepcje człowieka w socjologii typu miejsca publiczne, w tym zwłaszcza instytu
więcej podobnych podstron