1310109033
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.
Analiza odpowiedzi
Poniżej krotka analiza odpowiedzi regulatora na skok, dla rożnych nastaw i trybów pracy.
|
Parametr |
Nastawy |
Odczytane |
|
K |
1 |
1 |
|
Ti |
10 |
9,5 |
|
T„ |
0 |
0 |

|
i-h-H- |
1 ' M i 1 i 1 i M i 1 i 1 i 1 |
1 ' 1 i 1 ' ► |
|
Strzałka pokazuje stałą izodromu równą 9,5 czyli w przybliżeniu tyle ile nastawiliśmy. | ||
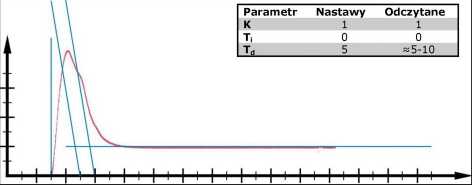
Na powyższym rysunku widać dwa różne ale w przybliżeniu możliwe przebiegi stycznej do wykresu w punkcie t=tsk0ku- Jednak precyzyjne wyznaczenie tego przebiegu jest bardzo trudne z względu na fakt, iż metoda ta działa dobrze tylko przy obiekcie rzeczywistym różniczkującym - czyli z inercją I rzędu. Tutaj jednak bezwładność plotera powoduje że nasz układ ma inercje wyższego rzędu co utrudnia obserwacje punktu przecięcia (1+Td/T).

|
Parametr |
Nastawy |
Odczytane |
|
K |
2 |
2,2 |
|
Ti |
0 |
0 |
|
Td |
0 |
0 |
-i-ł-i i i i i i i i i i i i i i i i i i i i i i -
Dla większego wzmocnienia odpowiedz skokowa nie jest tak idealna jak poprzednio, jednak jest to poprawny wynik.
[M
Strona 2
Wyszukiwarka
Podobne podstrony:
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID. Akademia Górniczo-Hutnicza im.
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID. W powyższym rysunku pominięto wyznacz
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Sygnał wyjściowy 2 pozycyjny - PWM Ćwi
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Realizacja PID przy wyjściu PWM Ćwicze
Ćwiczenie 4 - Badanie charakterystyk skokowych regulatora PID.Wnioski Zastosowany regulator realizuj
instalacje145 6. BADANIA SILNIKÓW SKOKOWYCH 170 Rys. 6.13. Odpowiedź silnika FA-34-4-1 na skok jedno
Wykaz Ćwiczeń LABORATORIUM ENERGOELEKTRONIKI III EDwykaz ćwiczeń 1. Badanie charak
więcej podobnych podstron