2277150811
Laboratorium Teorii Sterowania
2.5. Drgania przy zmianach wartości zadanej
Jeżeli wartość zadana d0 jest sygnałem zmiennym, a prędkość jej zmiany jest większa od prędkości zmian wielkości regulowanej 6, to przekaźnik pozostaje trwale załączony lub wyłączony i układ przestaje drgać. Jeżeli natomiast wartość zadana zmienia się z prędkością mniejszą od prędkości zmian wielkości regulowanej to w układzie występują drgania jak na rys. 6.8.
Oznaczając prędkość zmian wartości zadanej jako:
(6.21)
de„(0.
dt
w prowadźmy wartość zadaną Ooi(t) liniowo zmienną w czasie:
MO = 00(t) + T00(ty, (6.22)
dla wartości w zględnej temperatury zadanej wprow adźmy oznaczenie OOi(0
= (6.23)
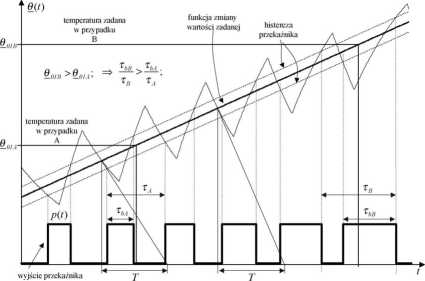
Rys. 8. Drgania w układzie regulacji dwupolożeniowej w przypadku gdy prędkość zmian wartości zadanej jest mniejsza od prędkości zmian wartości regulowanej
Przy analogicznych założeniach jak w rozdziale 2.4 można udowodnić, że równania (6.12) -(6.20) zachowują słuszność również dla zmieniającej się wartości zadanej doi ( lub doi). Wówczas wy rażenie na średni błąd regulacji ma postać:
-8-
Ćwiczenie 6 (RD) - Badanie układu dwupolożeniowej regulacji temperatury
Wyszukiwarka
Podobne podstrony:
Laboratorium Teorii Sterowania Ustawienia parametrów bloków: BG1 - blok wartości zadanej dla wymusze
Laboratorium Teorii Sterowania Rys. 6.6. Wykres błędu średniego w funkcji względnej wartości
14226 SNC00306 (2) yyyaaai ŁicKiryczny Zespół Automatyki (ZTMAiPC) LABORATORIUM TEORII STEROWANIA Ćw
WYDZIAŁ ELEKTRYCZNY PB KATEDRA AUTOMATYKI I ELEKTRONIKI Laboratorium teorii sterowania i
Laboratorium Teorii Sterowania Wydział Elektryczny Zespół Automatyki (ZTMAiPC)LABORATORIUM TEORII
Laboratorium Teorii Sterowania przekaźnika identyczną rolę jak sygnał e(t) w układzie bez korekcji,
Laboratorium Teorii Sterowania Parametn drgań układu z rys. 6.10 można obliczyć jak dla układu ze zm
Laboratorium Teorii Sterowania zwiększenie stałej czasowej Tw. W układzie niestabilnym zmienia się
więcej podobnych podstron