2277150812
Laboratorium Teorii Sterowania
«* =ek(o+™;w-yj <6.24)
Ponadto interesująca jest zależność między względnym czasem załączenia przekaźnika a względną wartością zadaną w danej chwili:
1„= — = e0T, (6.25)
T
z której wynika, że względny czas załączenia grzałki jest równy względnej wartości zadanej temperatury regulowanej. Wynik powyższy można przedstawić graficznie (rys. 6.8) rozpatrując dwa różne przypadki temperatury' zadanej (A i B).
2.6. Regulacja dwupołożeniowa z korekcją przez sprzężenie zwrotne
Podstawową zaletą regulacji dwupolożeniowej jest prostota realizacji. Niestety, cecha ta jest okupiona pogorszeniem jakości parametrów regulacji w porównaniu regulacją ciągłą. Najpoważniejszy m mankamentem w przypadku regulacji temperatury sąjej stosunkowo duże wahania wokół wartości średniej. Jak wiadomo z rozdziału 2.4 amplituda tych oscylacji zależy od parametrów samego obiektu i nie jest jej w stanie wyeliminować nawet zastosowanie przekaźnika bez histerezy. Jedną z możliwości poprawienia jakości regulacji jest zastosowanie układu z korekcją, przedstawionego na rys. 6.9.
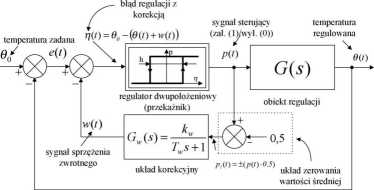
Rys. 9. Układ regulacji dwupolożeniowej z korekcją Układ korekcyjny o transmitancji:
(6.26)
Gw(s) = -
włączony w obwód ujemnego sprzężenia zwrotnego przekaźnika wprowadza modyfikację sygnału błędu e(t), co powoduje częstsze niż bez korekcji przełączanie przekaźnika. Korekcja jest skuteczna wówczas gdy, prędkość narastania sygnału z korektora w jest większa od prędkości zmian temperatury w obiekcie (dobór kH i T„). Zsumowanie sygnałów' sprzężenia zwrotnego z obiektu i korektora w(t) oraz odjęcie ich sumy od wartości zadanej daje zastępczy sygnał błędu rj(t), którego prędkość i sposób narastania jest określona głównie przez sygnał w(t). Łatwo zauważyć, że sygnał T}(t) spełnia dla
-9-
Ćwiczenie 6 (RD) - Badanie układu dwupolożeniowej regulacji temperatury
Wyszukiwarka
Podobne podstrony:
14226 SNC00306 (2) yyyaaai ŁicKiryczny Zespół Automatyki (ZTMAiPC) LABORATORIUM TEORII STEROWANIA Ćw
WYDZIAŁ ELEKTRYCZNY PB KATEDRA AUTOMATYKI I ELEKTRONIKI Laboratorium teorii sterowania i
Laboratorium Teorii Sterowania Wydział Elektryczny Zespół Automatyki (ZTMAiPC)LABORATORIUM TEORII
Laboratorium Teorii Sterowania przekaźnika identyczną rolę jak sygnał e(t) w układzie bez korekcji,
Laboratorium Teorii Sterowania Parametn drgań układu z rys. 6.10 można obliczyć jak dla układu ze zm
Laboratorium Teorii Sterowania zwiększenie stałej czasowej Tw. W układzie niestabilnym zmienia się
Laboratorium Teorii Sterowania3. Regulator RE-6 - budowa i zasada działania W ćwiczeniu laboratoryjn
Laboratorium Teorii Sterowania wskaźnik potencjometr potencjometr korekcji
Laboratorium Teorii Sterowania4. Program ćwiczenia Ćwiczenie laboratoryjne zostało podzielone na dwi
Laboratorium Teorii Sterowania 4.1.1. Badanie temperatury ustalonej pieca
Laboratorium Teorii Sterowania 4.2. Część II - badanie układu regulacji dwupołożeniowej metodą
Laboratorium Teorii Sterowania PIEC - UKŁAD INERCYJNY CZWARTEGO RZĘDU: • 7o=0 -
Laboratorium Teorii Sterowania Ustawienia parametrów bloków: BG1 - blok wartości zadanej dla wymusze
Laboratorium Teorii Sterowania Najprostszym układem regulatora jest przekaźnik dwupołożeniowy
więcej podobnych podstron