5910202232
> tarcie szczotek o komutator powoduje powstanie strefy nieczułości, gdyż rozruch silnika następuje dopiero po przekroczeniu przez napięciezasilania pewnej wartości progowej. Wartość względna tej wartości progowej jest szczególnie duża dla silników małej mocy.
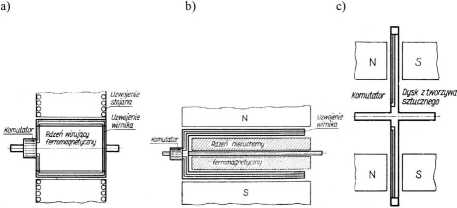
Rys. 34. Różnice konstrukcyjne między silnikiem a) obcowzbudnym prądu stałego; b) kubkowym; c) dyskowym (tarczowym)
Silniki obcowzbudne prądu stałego spotykane w manipulatorach mają:
> stałe wzbudzenie, generowane przez małe, lecz silne magnesy trwałe ze stopu alnico lub magnesy ceramiczne zawierające tlenki żelaza;
> dużą liczbę par biegunów: 8... 12 zapewniającą względnie małe prędkości maksymalne, nie przekraczające ok. 200 rad/s (2000 obr/min);
> małe momenty bezwładności wirnika, będącego najczęściej cienkim dyskiem z tworzywa sztucznego z dużą liczbą uzwojeń nadrukowanych z oby dwu stron i wałkiem z lekkiego i wytrzymałego tytanu.
Klasyczny silnik elektryczny może wytrzymać konkurencję z dyskowym pod względem stosunku momentu obrotowego do masy. Z drugiej strony dyskowy silnik elektryczny jest szybki w działaniu, ale ma mniejszy moment obrotowy rozruchowy. Jest on budowany dla zmniejszenia stałej czasowej oraz bezwładności wirnika, co jest istotne przy projektowaniu układów sterowania.
4.2. Silnik dyskowy (rys. 35)
35
Wyszukiwarka
Podobne podstrony:
napędy i sterowanie • na komutatorach i pierścieniach ślizgowych (tarcie szczotek,
drutu w warstwę metaliczną. Tarcie powoduje powstanie wysokich lokalnych temperatur, które są wystar
Slajd33 (105) Łącznie z promieniem zataczania powoduje powstanie momentu stabilizacyjnego
Slajd34 (98) Powoduje powstanie momentu stabilizacyjnego od bocznych
img009 (14) końcówki liczby mnogiej do takiego rzeczownika powoduje powstanie struktury uznawanej tr
IMG743 Wirusy powodujące powstawanie raków u człowieka Wirus rak kofaktor Ludzi wirus
pppggg1 POLITYKA GOSPODARCZA - EGZAMIN l. Niewystarczający popyt globalny powoduje powstawanie: a)
IMGc51 (2) 198 Ziarniaki runkach tlenowych. Ma właściwości .antygenowe, powoduje powstawanie przeciw
skanuj0006 I • Brodawki Zakażenia wirusowe często powodują powstawanie brodawek paznokci. Brodawki w
Opracowanie ekofizjograficzne podstawowe dla miasta Kostrzyn nad Odrą powoduje powstawanie inwersji,
więcej podobnych podstron