1313878652
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW Wprowadzenie
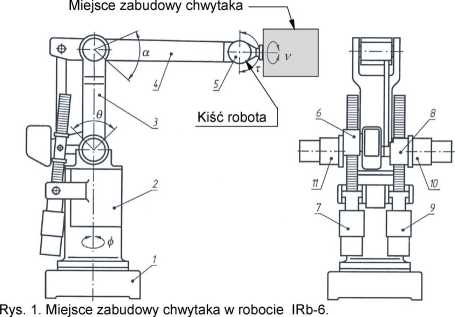
Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora zwykle na tzw. „kiści”. Jeżeli kiść nie występuje chwytak mocowany jest do ramienia manipulatora. W niektórych przypadkach zamiast chwytaka mocowane jest narzędzie robocze lub człon roboczy.
Zadania urządzenia chwytającego:
• pobranie (uchwycenie) obiektu manipulacji w położeniu początkowym,
• trzymanie obiektu w trakcie trwania czynności manipulacyjnych,
• uwolnienie obiektu manipulacji w miejscu docelowym.
Unieruchomienie obiektu w chwytaku może być realizowane dwoma sposobami:
• poprzez wytworzenie układu sił działających na obiekt manipulacji
• poprzez odjęcie obiektowi manipulacji wszystkich sześciu stopni swobody odpowiednio ukształtowanymi końcówkami chwytaka.
Opracował: J. Felis str. 1
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Według kryterium sposob
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów W zależności od przyjęt
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Układy przeniesienia na
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów KONSTRUOWANIE CHWYTAKA
więcej podobnych podstron