1313878657
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
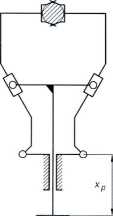
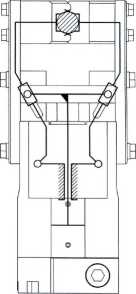
Początkowe położenie ramion chwytaka
Maksymalne położenie ramion chwytaka
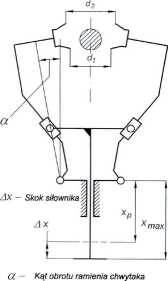
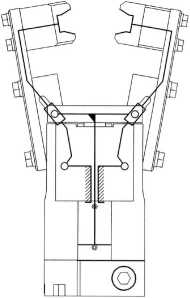
Rys. 7. Konstruowanie chwytaka na podstawie schematu kinematycznego
Opracował: J. Felis str. 6
Wyszukiwarka
Podobne podstrony:
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Temat: CHWYTAKI MANIPUL
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Według kryterium sposob
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów W zależności od przyjęt
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów Układy przeniesienia na
więcej podobnych podstron