1588094354
2.5. Kalibracja kamer z Camera Calibration Toolbox for Matlab 16
Po wyznaczeniu współrzędnych wszystkich narożników, można już rozpocząć właściwy proces kalibracji kamery. Dla danych z obrazka powyżej otrzymujemy następujące wyniki:
fx = 711.49475 ± 14.30421 fy = 730.14404 ± 21.36334 xo = 319.5 x0 = 239.5
7 = 0
ki = -0.31619 ± 0.03658 k2 = 0.28540 ± 0.02834 pi = -0.00518
P2 = 0
Rysunek 2.5 przedstawia rozrzut błędu wyznaczania pozycji narożników szachownicy względem otrzymanych wyników. Jeżeli punkty na tym wykresie tworzą zwartą grupę blisko środka układu współrzędnych, to kalibrację można uznać za prawidłową.
Reprojection error (in pixel)
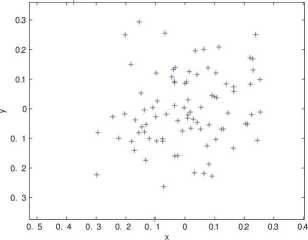
Rysunek 2.5: Błąd wyznaczania pozycji narożników
Camera Calibration Toolbox umożliwia także rektyfikację obrazów stereoskopowych. W pierwz-szej kolejności należy wykonać osobno kalibrację dla prawej i lewej kamery. Posiadając parametry wewnętrzne dla obu kamer, można wyznaczyć parametry zewnętrzne dla całego układu (przyjmując kamerę lewą za kamerę odniesienia). Rysunek 2.6 przedstawia przykładowe obrazy wejściowe.
M. Panuś Stereowizja z wykorzystaniem wielu kamer
Wyszukiwarka
Podobne podstrony:
2.5. Kalibracja kamer z Camera Calibration Toolbox for Matlab 152.5. Kalibracja kamer z Camera Calib
2.5. Kalibracja kamer z Camera Calibration Toolbox for Matlab 17 Rysunek 2.6: Obrazy wejściowe do ka
2.5. Kalibracja kamer z Camera Calibration Toolbox for Matlab 18 Wyznaczenie parametrów wewnętrznych
img2txt Many MATLAB toolboxes for małh and dała analysis are significanłly updałed in Release 12. En
02 ML tlbx text Many MATLAB toolboxes for małh and dała analysis are significanłly updałed in R12. E
f36 6 Pay I Week Month Year GroupCal ToDo NewAppt Preferences Info Calendar for: BobCWeek: 16 April
calibre cover i For everything i lighc, there is "somethlng dark.,
calibre cover o "For my money, O Bill Cameron is the rising star of crime
printf("MiODSZYFROUAWE DAHE:
Kalibracja kamery Kalibracja kamer ma na celu dostarczenie charakterystyki metrycznej
Wprowadzenie do MatLab (16) Name Sl2C 8vteJ: iii 1x1 3 double array -jo 1x3 24 double
ANPR cameras captures images for evidence and LPN. registers his or her intent to use road
Tematyka toolbox-ów Matlaba SIMULINK - Symulacja układów Matematyka
img073 (4) 16 R 3 Zadanie 9. Wyznaczyć stosunek K ■ r: nlka napięcia /rys. 1.16/f
więcej podobnych podstron