1869685794
84
Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I
Zgodnie z zależnością (1):
(JE+JL/ń + (jE+fLy<» = Tl!-TL (1)
gdzie: Je - moment bezwładności silnika,
JL - moment bezwładności obciążenia, fE - współczynnik tarcia silnika,
/l - współczynnik tarcia obciążenia,
Te - moment obrotowy silnika,
7l - moment obciążenia
każda zmiana prędkości obrotowej wywołana celowo lub poprzez zakłócenia powoduje powstanie momentu dynamicznego, którego wartość i kierunek uzależnione są od zmiany wartości prędkości obrotowej, ale również od zmiany momentu bezwładności. Znacznie komplikują się badania, w których należy uwzględnić przypadek polącznia mechanicznego badanej maszyny poprzez elementy giętkie, lub takie, w których mogą występować luzy [8], Równanie (2) opisuje dynamikę układu napędowego w przypadku połączenia maszyny badanej z obciążeniem poprzez elementy sprężyste (np. długi wał) [7]:
Je‘&e + fE‘ÓE+k-(0E-0L)=TE
JL-eL+fL-eL+k\eL-eE)=TL
gdzie: 6e - kąt położenia wirnika maszyny badanej, Oe - kąt położenia wirnika obciążenia, k - współczynnik sprężystości.
Stanowisko o takich właściwościach, tj. kształtujące nie tylko moment statyczny, ale również dynamiczny wymaga ciągłego kontrolowania prędkości obrotowej. Jednak w przypadku symulowania połączeń sprężystych konieczny jest pomiar położenia wirnika (2). Realizacja takiego stanowiska wymaga zastosowania układu sterowania, który w czasie rzeczywistym będzie rozwiązywał odpowiednie równania różniczkowe. W obecnych czasach z takimi układami nie ma większego problemu. W zasadzie można pójść o krok dalej i pokusić się o kształtowania obciążenia zbliżone do warunków rzeczywistych [3,4,5], np. podczas badania silnika przeznaczonego do napędu samochodu uwzględniać: masę pojazdu, prędkość czy nachylenie toru jazdy. Przykładową zależność opisująca charakterystykę obciążenia silnika napędzającego samochód przedstawia wzór [6]:
Fl =MV-a+^pCdAv2 +CtMvg+Mvgsmp (3) TL=^ (4)
l-TJ
gdzie: Mv - masa pojazdu, a - przyspieszenie pojazdu, p - gęstość powietrza, Cd - współczynnik oporu aerodynamicznego, A - powierzchnia czołowa pojazdu, v - prędkość pojazdu. C, - współczynnik oporu toczenia, /? - nachylenie drogi, r - promień kół, i - przekładnia mechaniczna, 7 - sprawność układu przeniesienia napędu.
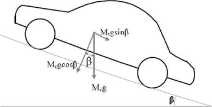
Rys. 1 Rozkład sil działających na samochód [6]
By uzyskać uniwersalność stanowiska dynamometrycznego, oprócz samego kształtowania obciążenia momentem maszyny badanej w reżimie silnikowym, konieczne jest przeprowadzenie podobnych badań w reżimie generatorowym. Wymusza to zastosowanie takich układów, które pozwalają na przepływ' mocy w' obu kierunkach, tzn. stanowisko dynamometryczne powinno generować moment hamujący, ale również moment napędzający. Jednym z Możliwych rozwiązań tego problemu jest zastoso-w'anie maszyny elektrycznej zasilanej z przekształtnika energii z możliwością jej zwrotu do sieci.
2. Układ napędowy stanowiska
Tak wysoko zdefiniowane parametry budowy stanowiska badawczego, które oprócz kształtowania statycznych momentów na w'ale badanej maszyny, będzie generowało moment dynamiczny,
a charakterystyki statyczne będą odzwierciedlały rzeczywisty moment obrotowy obciążający badaną maszynę, wymaga zastosowania odpowiednich komponentów. Niewątpliwie
najważniejszymi
z nich, stanowiący serce tego stanowiska, jest silnik, który będzie kształtował moment hamujący lub napędzając}' badaną maszynę oraz przekształtnik, którego zadaniem będzie kontrola
Wyszukiwarka
Podobne podstrony:
83 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. IRyszard Pałka, Sebastian Szkolny Katedr
85 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I Tabela 1. Porównanie wariantów maszyn
86 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I maksymalnej, czyli 8000 obr/min, warto
87 Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. I Tabela 2. Porównanie parametrów kart
Zeszyty problemowe - Maszyny Elektryczne Nr 100/2013 cz. 1 prowadzenia kompleksowych badań projektow
89 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) Jarosław Załęski, Michał Dadana, Paweł
90 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) magnetycznej urządzeń „automotive" t
91 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) > awarię na skutek u
92 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) Tabela 1. Wybrane parametry badanego
93 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2013 (98) 5. Wnioski Układ napędo
116 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) szczenią, zasady pomiaru, wartości odnie
Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) 119 PN-EN 14253+A 1:2011 PN-EN
10 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) ograniczających niekorzystne zjawiska sie
11 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Silnik SAS w otoczeniu infrastruktury tec
12 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Rys. 6. Rozruch i praca silnika DC 1120kW
13 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) i ostek, dostępnej energii 30 jednostek,
15 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) Rys. 16. Rozruch sil. za pomocą Powerboss
16 Zeszyty Problemowe - Maszyny Elektryczne Nr 2/2013 (99) 4>- Obciążenie Moment Napięcie
71 Zeszyty Problemowe - Maszyny Elektryczne Nr 1/2012 (94) Mv) = - + 0,24 (9) 100+ 8v z wyznaczoną p
więcej podobnych podstron