5217957053
4. OBIEKT BADAŃ
1. Suwnica z podwieszonym ładunkiem
Obiektem jest suwnica z podwieszonym ładunkiem, który przy zmianie pozycji wózka zachowuje się jak wahadło i kołysze się. Tłumienie kołysań zależy od oporów mchu. ale przeważnie jest niewielkie. Schemat obiektu pokazano na rys.5. Celem zadania jest zaprojektowanie filtra wejściowego, który ograniczy kołysanie ładunku przy zmianie położenia zadanego. Schemat blokowy układu przedstaw iony jest na rysunku 6.
Rys.5. Schemat suwnicy z ładunkiem
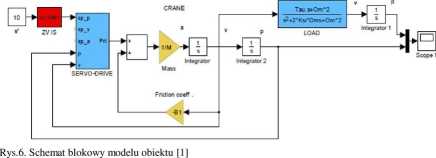
Model obiektu składa się z części elektrycznej, czyli serwonapędu z regulatorem położenia i prędkości wózka oraz z części mechanicznej, czyli modelu ładunku na linie. Część elektryczna opisuje dynamikę ruchu wózka a część mechaniczna dynamikę ruchu ładunku (obciążenia). Dynamika ruchu ładunku opisana jest członem oscylacyjnym drugiego rzędu:
vi W
Vc(s)
p(*) =
TS + OJ2
s2 + 2£ljs + oj2 gdzie co, £ to pułsacja drgań nietlumionych i współczynnik tłumienia obiektu, Vc to prędkość wózka dźwigu a V, to prędkość kątowa ładunku. Transmitancja opisuje zależność pomiędzy prędkością wózka a prędkością ładunku. Układ regulacji serwonapędu (Rys.7) składa się z trzech pętli o strakturze kaskadowej: prądu, prędkości i położenia. Pętla regulacji prądu może być zamodelowana jak obiekt inercyjny pierwszego rzędu a regulatory prędkości i położenia mają strukturę odpowiednio PI i P. W układzie przewidziano także generator trajektorii, czyli sprzężenia typu FF reprezentujące pożądaną trajektorię prędkości (sp_v) i przyspieszenia (sp_a). Sygnałem wejściowym do układu serwomechanizmu jest wartość zadana położenia wózka a sygnałem wyjściowym - siła napędowa wózka.
SERVO-ORIV=

Rys.7. Stmktura układu regulacji serwonapędu [1]
Wyszukiwarka
Podobne podstrony:
Zdjęcie038 Mikroskopia elektronowa Zdolność przenikania wiązki elektronów przez badany obiekt J
Zdj?cie1656 Fotogrametryczne wyznaczanie przemieszczeń Celem badania odkształceń obiektow jest jakoś
Pojęcie zdolności produkcyjnych Zdolność produkcyjna obiektu jest jego zdolnością do wytwarzania lub
Obiekt jest murowany i posiada trzy klatki schodowe . Jedna z klatek w części trzykondygnacyjnej prz
Ogólne zasady programowania zorientowanego obiektowo Główną zaletą hermetyczności obiektów jest
Ogólne zasady programowania zorientowanego obiektowo Programowanie zorientowane obiektowo jest podst
obrazu, można wyznaczyć pole skanowania i ocenić, czy obiekt jest dobrze ułożony na szybie skanera;
Poznaj C++ w$ godziny0179 168 Godzina 12 Występuje tutaj jeszcze jeden, dodatkowy koszt. Każda kopia
Wrocławiu PROJEKT KODEKSU KARNEGO POLSKIEGO REPRINT Z ROKU 1918 Właścicielem obiektu jest Biblioteka
IMGP1167 Systemy baz danych [ Powiązanie - Jest tym za pomocą czego kilka obiektów Jest wiązanych ze
z konkretnymi przedmiotami i zdarzeniami, których te hipotezy dotyczą. Manipulacja umysłowa obiektam
IMGC98 34 Wprowadzenie 34 Wprowadzenie cza. iż sens społeczny obiektu jest własnością zachowania, a
obiektów jest konieczność wykorzystania znaczących zapasów militarnego plutonu, który nie może być w
więcej podobnych podstron