5654709007
170 Grzegorz Śląski, Janusz Walkowiak
z sygnałów jest sygnałem zadanym przez kierowcę w celu uzyskania pożądanej przez niego dynamiki zmian prędkości samochodu. Drugi jest w istocie uzyskanym efektem - przebiegiem prędkości samochodu czasie.
Tym co decyduje o wartości uzyskanej dynamiki zmian prędkości są dwa elementy:
• charakterystyka własności trakcyjnych samochodu - własności układu napędowego, masa samochodu, itd.
• zmienne zewnętrzne opory ruchu samochodu w postaci zmiennych oporów powietrza i wzniesienia.
ZAKŁÓCENIA:
zmienne opory ruchu
WEJŚCIE:
Sygnał sterowania siłą napędową - otwarcie przepustnicy
WYJŚCIE:
Prędkość wzdłużna pojazdu
Struktura dynamiczna samochodu z układem napędowym z automatyczną skrzynią biegów
Rys. 4 Schemat struktury sygnałów działających na badany układ napędowy.
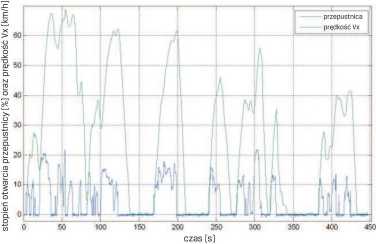
Rys. 5. Zestaw sygnałów przygotowanych do symulacji odtwarzającej.
Wyszukiwarka
Podobne podstrony:
172 Grzegorz Śląski, Janusz Walkowiak Warto zwrócić uwagą na konieczność zastosowania dodatkowego
174 Grzegorz Śląski, Janusz Walkowiak ^
176 Grzegorz Śląski, Janusz Walkowiak Istotą zastosowanej metody szybkiego prototypowania z wykorzys
178 Grzegorz Śląski, Janusz Walkowiak • uśrednienie przy pomocy tzw. średniej
164 Grzegorz Śląski, Janusz Walkowiak doraźnej oraz trwałościowe - w tym ostatnim przypadku często
182 Grzegorz Śląski, Janusz Walkowiak [10] ,ŚLĄSKI, G„ WALKOWIAK, J„ WALERJAŃCZYK, W.: Drogowe
166 Grzegorz Śląski, Janusz Walkowiak W przytoczonych publikacjach jak i wielu innych na ogół nie om
168 Grzegorz Śląski, Janusz Walkowiak c) układ sterowania - część sprzętowa: •
170 Grzegorz Śląski 3.1. Rozpoznawanie częstotliwości Dla detekcji częstotliwości kluczowym zadaniem
180 Grzegorz Śląski, lanusz Walkowiak (podobnie zsynchronizowano dane podczas pomiarów) uzyskano
Zarządzanie zasobami ludzkimi jest działalnością inicjowana przez kierownictwo najwyższego szczebla,
Zmienna w szeregu czasowym jest często oznaczana przez Zt w celu odróżnienia od zmiennych X i Y stos
DSC02659 Pokarm za pomocą języka i policzków formowany jest w kęs, który następnie kierowany w celu
Image182 czym stan wyjść demultipleksera jest stanem chwilowym (właściwy sygnał trwa przez 1/2
img093 93 Moc sygnału modulacji amplitudy impulsów jeśt proporcjonalna do mocy sygnału modulującego
PRZEK1. Jest on sterowany przez mikrokomputer w głowicy. Na styki ruchome tego przekaźnika wchodzi s
PRZEK1. Jest on sterowany przez mikrokomputer w głowicy. Na styki ruchome tego przekaźnika wchodzi s
PRZEK1. Jest on sterowany przez mikrokomputer w głowicy. Na styki ruchome tego przekaźnika wchodzi s
więcej podobnych podstron