604495491
472 A. ŻAK
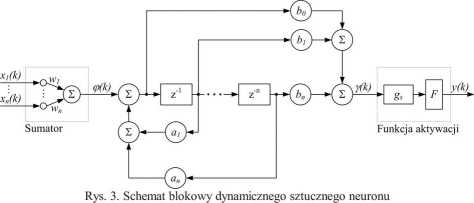
W dynamicznym modelu neuronu można wyodrębnić trzy bloki: sumator ważonych sygnałów wejściowych; dynamiczny system liniowy; nieliniowy blok aktywacji.
W bloku sumowania następuje obliczanie sumy ważonej informacji dochodzących do neuronu na podstawie zależności [1,2]:
(5)
cp(£) = X W, (£)*,(*)
gdzie: w - waga i -tego wejścia; x - i -ty sygnał wejściowy; N - ilość składowych sygnału wejściowego; k - indeks dyskretnego czasu.
Obliczona suma ważona jest następnie przetwarzana w dynamicznym systemie liniowym, który może być filtrem dowolnego rzędu. Opisana ona jest następującym równaniem różnicowym [1,2]:
y(k) = -atY(k -1) -any(k - p) + b0(p(k) + b{(p(k -l) +... + bn(p(k - q) (6)
gdzie: ę - wejście bloku filtru w chwili k; y - wyjście filtru w chwili k; a, b - wektory wag sprzężeń zwrotnych i połączeń jednokierunkowych; p, q - wartości stałe określające rząd filtru.
Ostatecznie sygnał wyjściowy neuronu, będący sygnałem wyjściowym bloku aktywacji, wyznaczany jest z zależności [1,2]:
y(Jc)=F[g, vm (7)
gdzie: F - nieliniowa funkcja aktywacji; gs - współczynnik nachylenia funkcji aktywacji.
Celem algorytmu uczenia jest wyznaczenie wartości parametrów dynamicznego modelu neuronu (wartości wag, wartości współczynników dynamicznego systemu liniowego oraz współczynnika nachylenia funkcji aktywacji), przy czym bazuje się na danym zbiorze par wzorców wejściowych i wyjściowych. Ich wyznaczenia można dokonać poprzez rozwiązanie
Wyszukiwarka
Podobne podstrony:
IMG463 W zależności od wysokości roślin można wyodrębnić trzy strefy, w których mogą być sadzone drz
W ramach zobowiązania, jako stosunku cywilnoprawnego, można wyodrębnić Trzy elementy: Podmioty
78836 skanuj0262 270 na giełdzie koniunktury, dzięki analizie technicznej można wyodrębnić trzy pods
WZORY Rozważając zależności pomiędzy AP, TP i MP można wyodrębnić trzy etapy produkcji: 1.
-16- Zanim powstanie wypadek przy pracy lub choroba zawodowa w środowisku pracy można wyodrębnić trz
Z poprzednich definicji można wysnuć trzy cechy odnoszące się także do scenariusza zajęć lekcyjnych
skanuj0243 251 251 Ze względu na zakres działania oraz stopień ryzyka można wyodrębnić wiele rodzajó
Image625 W zakresie badań funkcjonalnych można wyróżnić trzy metody sprawdzania układów: —
W ekstruderach dwuślimakowych, podobnie w jak jednoślimakowych można wyróżnić trzy strefy: transport
więcej podobnych podstron