604001110
podtrzymywanie temperatury w pewnym zakresie. Dlatego też, regulator dyskretny sterujący podgrzewaniem wody jest uruchamiany okresowo sygnałem np. z okresem 300 sekund.
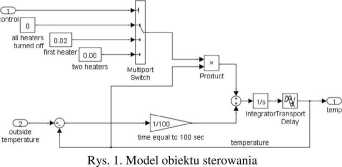
W celu realizacji układu sterowania należy zamodelować obiekt w programie Simulink. Następnie należy powiązać sygnały wejściowe i wyjściowe obiektu z projektowanym modelem regulatora dyskretnego, patrz rys. 1.
Następnie model obiektu należy zgrupować i podłączyć wartość stałą temperatury otoczenia, patrz rys. 2.
outside temperatura
EH
Rys. 2. Zgrupowany model obiektu
W dalszej części zadania należy zaprojektować sygnały sterujące regulatorem podgrzewacza. Z biblioteki Simulink/Sources należy wybrać blok Signal Builder. Sygnał włączający lub wyłączający grzałki o nazwie SWITCH dodajemy poprzez zakładkę Signal/New/Square. Parametry sygnału SWITCH to: częstotliwość 1/300 Hz, amplituda 1, offset 0, wypełnienie okresu 50%, długość sygnału: 600 sekund. Sygnał SWITCH powinien zaczynać się od wartości zero, można to zmienić poprzez przeciągnięcie myszką. W podobny sposób dodajemy sygnał taktujący przełączanie pomiędzy stanami regulatora o nazwie CLOCK. Parametry sygnału CLOCK to: częstotliwość 1 Hz, amplituda 2, offset 0 i wypełnienie okresu 50%. Ograniczenia sygnału CLOCK (prawy klawisz myszy) y: od 0 do 2, x: od -inf do inf. Po zbudowaniu sygnałów okno bloku Signal Builder przedstawiono na rys. 3.
4
Wyszukiwarka
Podobne podstrony:
gallery 75078961 500x500 Jeremiasza 31 ■ Ukochałem cię odwieczną miłością, dlatego też podtrzymywałe
Przemiany podczas chłodzenia Austenit jest fazą trwałą tylko w pewnym zakresie temperatur i po ochło
Scan0055 2 I Dlatego też metale alkaliczne są miękkie, mają niską temperaturę topnienia (Rb 38,9°C;
ZWIĄZKI METALI WSPOMAGAJĄCE PROMIENIOTERAPIĘ 361 Dlatego też systematycznym badaniom w zakresie wpły
Do czego stuży? • Konspekt ma stużyć praktycznemu przeprowadzeniu lekcji, dlatego też nie powinien b
Zdjęcie0617 (2) Teoria dysoojaoji elekt roi ityozn ej wg. Arrheniusa (1887) Elektrolity dysocjują w
VII. 4. Wf.OliZISMW I ŁOKIETEK (ż. JADWIGA). 341 na podstawie dokumentów granicę; i dlatego też tylk
VII. 4. Wf.OliZISMW I ŁOKIETEK (ż. JADWIGA). 341 na podstawie dokumentów granicę; i dlatego też tylk
więcej podobnych podstron