8960330295
2. Zachowania autonomiczne
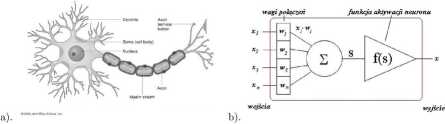
Rysunek 2.1 a). Schemat neuronu, b). Schemat pojedynczego neuronu w sztucznej sieci neuronowej
Kryteria oceny systemów behawioralnych zostały wymienione poniżej:
• Wsparcie dla zrównoleglenia (support for parallelism): określa, w jakim stopniu architektura wspiera zrównoleglenie.
• Odwzorowanie w sprzęcie (hardware targetability): definiuje, jak dobrze system może być odwzorowany w sprzęcie, może też mówić o stopniu wsparcia dla implementacji na poziomie wyspecjalizowanych układów scalonych.
• Nakierowanie na nisze (niche targetability): wyznacza, jak dobrze robot pasuje do środowiska, w którym pracuje.
• Wsparcie dla modularności (support for modularity): mówi, jakie metody dostarcza architektura do realizacji modularności.
• Trwałość (robustness): Jak dobrze system spisuje się w sytuacji awarii któregoś z jego elementu, np. sensora.
• Stosowalność (timeliness in development): odpowiada na pytanie, czy architektura jest tylko podejściem filozoficznym, czy też dostarcza elementów, umożliwiających jej rzeczywistą implementacje.
• Elastyczność w czasie pracy (run time flezibility): Jak łatwo system może być rekon-figurowany i dostosowywany w trakcie jego pracy.
• Efektywność pracy (performance effectiveness): Jak dobrze robot wykonuje swoje zadanie.
Na podstawie zebranych w [1] opisów przedstawiane zostały wybrane architektury.
2.1 Architektura Subsumption
W latach 80. XXw. Rodeny Brooks zaproponował architekturę subsumpion. Była ona całkowicie reaktywnym systemem opartym o metodykę behawioralną, mało popularną w tamtym okresie. Brooks, argumentując sens podejścia patrz-myśl-działaj (sense-plan-act) twierdził m.in., że podejście wykorzystujące modele świata oraz formalny opis wiedzy, stanowi przeszkodę w szybkich odpowiedziach robotów oraz prowadzą badania robotyczne w złym kierunku. Alternatywą miała być zaproponowana przez niego architektura, której głównymi założeniami były:
Wyszukiwarka
Podobne podstrony:
2. Zachowania autonomiczne Rysunek 2.3 Schemat systemu w architekturze subsumption •
Obraz(269 Pi x Pi Rysunek 5. Schemat hodowli rodowodowej tomstwo jednego pojedynka z poprzedniego po
KOMÓRKI ROŚLINNEKOMÓRKI ZWIERZĘCE *proporcje komórek nie zostały zachowane, rysunek schematyczny
o rysunek schematyczny - przedstawia w najprostszy sposób zasady działania lub budowy jakiegoś mecha
Słońce z plamami, pochodniami i protuberancjami. Rysunek schematyczny według dostrzeżeń w Kolegjum
Wprowadzenie f-^ -^ V Kontrola ,_, Montaż Produkt Rysunek 1.1 Schemat
Rysunek 3 Schemat optymalnego zasięgu rąk Sprawdź: 1. Czy materiały narzędzia są
Rysunek 3. Schemat przedstawiający lokalizację terenów leśnych na terenie gminy i miasta Źródło:
page0014 2 Gady. Żółwie. 2 Gady. Żółwie. Ryc. l. Rysunek schematyczny krążenia krwi u gadów: a —
klasyfikacja gruntów4 EN ISO 14688-1:2002 grunt został osadzony wyniku procesów naturalnych ? R
skanowanie0003 5 Dyscypliny geograficzne• Rysunek 1.1 Schemat podziału nauk geogra
więcej podobnych podstron