
Metody projektowania
eksperymentu
Opracowanie pytao
By
MC_OMEN
1. Istota jakościowego i ilościowego planowania eksperymentu
Jakościowe planowanie eksperymentu (qualitative experiment design):
Polega ono na wyborze konfiguracji wejście-wyjście tak, aby zapewnid (jeśli to w ogóle możliwe) globalną
identyfikację wszystkich parametrów systemu. Jakościowe planowanie eksperymentu korzysta pojęcia i
narzędzi badania indentyfikalności modelu.
Ilościowe planowanie eksperymentu (quantitative experiment design):
Polega ono na optymalizacji odpowiedniego kryterium (odnoszącego się np. do postaci pobudzenia lub
schematu próbkowania, tj. liczby i lokalizacji próbek odpowiedzi). Optymalizacja ilościowa prowadzi do
określenia takich warunków eksperymentu, które zapewniają uzyskani
2. Jaki warunek musi byd spełniony, aby parametry modelu mogły byd jednoznacznie
wyznaczone na podstawie noise-free input-output data?
Dla obranego poprawnego modelu wektor jego parametrów może byd jednoznacznie wyznaczony na
podstawie noise-free input-output data tylko wtedy gdy model jest strukturalnie globalnie identyfikowalny.
Jeśli model nie jest s.g.i., wówczas istnieje więcej niż jeden zbiór parametrów, dla których uzyska się dobre
dopasowanie odpowiedzi do danych pomiarowych.
Model jest S.G.I czyli strukturalnie globalnie identyfikowalny gdy jego wszystkie parametry są SGI.
Wektor parametrów p:
[
]
Niech dwie wartości wektora parametrów modelu:
( )
( )
różnią się tak niewiele, że odpowiedzi
modelu
( )
( )
są nierozróżnialne
(
( )
) (
( )
)
Parametr
jest SGI gdy dla każdego
( )
( )
zachodzi :
(
( )
) (
( )
)
( )
( )
3. Omów rezultat identyfikacji parametrów modelu, który nie jest strukturalnie globalnie
identyfikowalny lecz jest identyfikowalny lokalnie.
Jeżeli model jest lokalnie identyfikowalny to wszystkie parametry mogą byd obliczone, ale niektóre z nich mają
więcej niż jedno rozwiązanie. Tak więc SLI mówi o tym że istnieją modele o różnych wektorach parametrów,
odpowiadające identycznym sygnałem wyjściowym na zadane pobudzenie. Model taki jest nierozróżnialny z
punktu widzenia mierzonego sygnału wyjściowego. Jednakże powinniśmy wybrad jedno rozwiązanie kierując
się wiedzą adekwatną do modelu, np. medyczną. Np poprzez wykluczanie rozwiązao nie spełniających
zadanych warunków, logicznych oraz założeniowych (np stężenie < 0 % większa ilośd substancji w miejscu
badania niż w miejscu podania). Czasem jednak nie mamy podstaw do takiego rozumowania, a wówczas
należy zmodyfikowad strukturę modelu do postaci globalnie identyfikowalnej.
4. Jakośd modelu – analiza czułościowa
Model spełniający warunki strukturalnej identyfikowalności, może nie byd identyfikowalny w praktyce,
gdy proces estymacji znajduje się pod silnym wpływem błędów pomiarowych. Proces estymacji parametrów
wymaga znalezienia minimum funkcji kryterialnej w przestrzeni wielowymiarowej. Rozmiar przestrzeni jest
równy liczbie estymowanych parametrów. Przykładowo, dla funkcji modelu
t
p
mod
e
p
y
2
1
przestrzeo
parametrów jest 2-wymiarowa a dla
t
p
t
p
t
p
mod
e
p
e
p
e
p
y
6
4
2
5
3
1
przestrzeo parametrów jest 6-
wymiarowa. Oznaczmy przez
J
p
i
S
czułośd funkcji kryterialnej J względem parametru
p
i
n
,..,
,
i
,
p
2
1
. Rozważmy
hipotetyczne czułości
J
p
S
1
oraz
J
p
S
2
:
1
p
J
2
p
2
1
p
J
,
p
J
J
p
J
p
S
S
2
1
Załóżmy, że rozdzielczośd dla J, wynikająca z błędów pomiarowych, wynosi
J
. Zatem błąd
1
p
estymaty
1
p
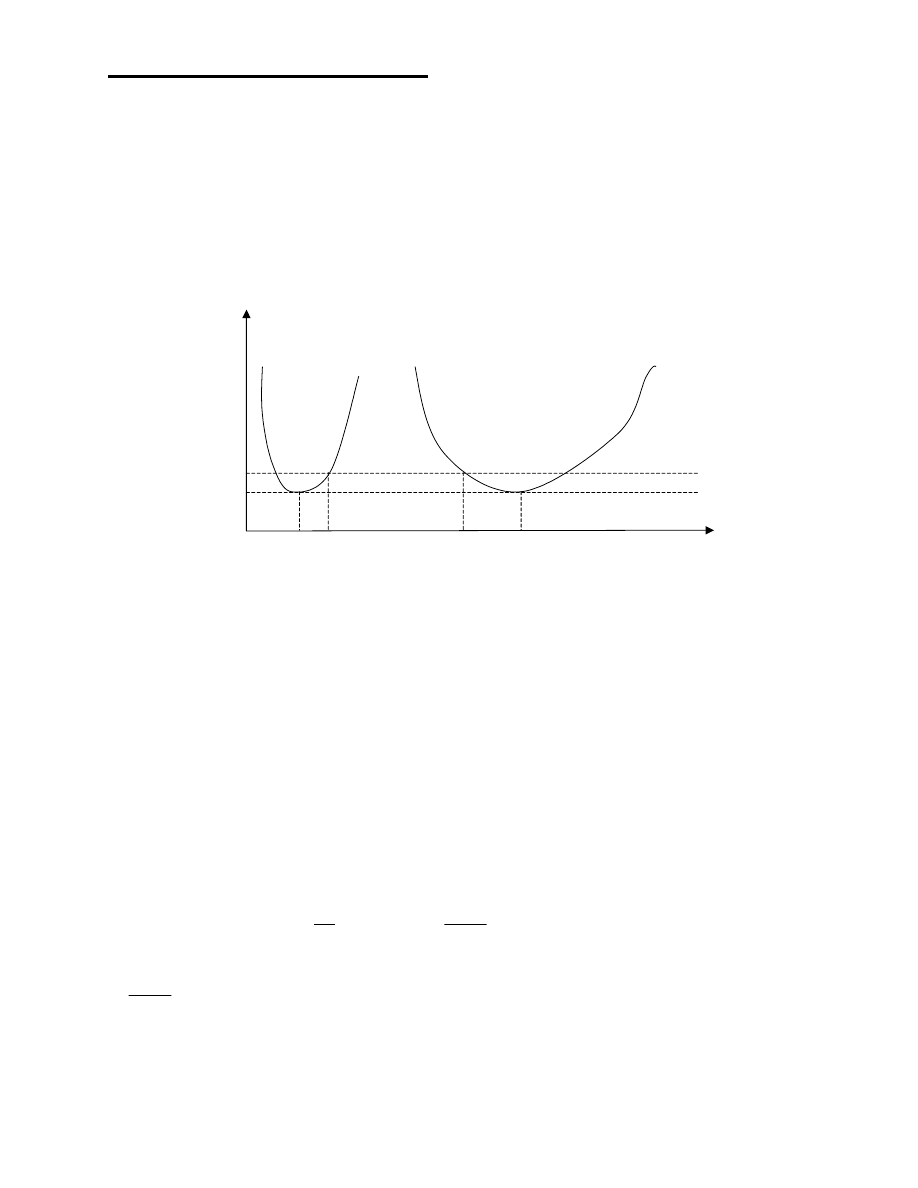
, związany z rozdzielczością, jest mniejszy dla dużej czułości
J
p
S
1
, niż błąd
2
p
estymaty
2
p
dla
mniejszej czułości
J
p
S
2
. Tak, więc, dla takiego samego błędu pomiaru, błędy estymat są różne, zależnie od
czułości
J
p
i
S
.
Zależnośd między czułością oraz błędem estymat parametrów może byd przedstawiona w formie
analitycznej. Przywołajmy funkcję kryterialną i zapiszmy ja w postaci macierzowej:
mod
T
mod
J
y
y
y
y
gdzie y i
N
mod
y
,..,
y
1
y
to odpowiednio zbiór N próbek odpowiedzi systemu i odpowiedzi modelu.
Różniczkując J względem wektora parametrów
p
i
n
,..,
,
i
,
p
2
1
p
otrzymujemy:
S
y
y
p
y
y
y
p
T
mod
mod
T
mod
J
gdzie
p
y
S
mod
to macierz czułości o wymiarze
p
n
N
:
p
p
p
p
n
N
n
N
N
N
n
n
p
y
p
y
p
y
p
y
p
y
p
y
p
y
p
y
p
y
2
1
2
2
2
1
2
1
2
1
1
1
S
Oznaczmy przez
p współrzędną minimum globalnego funkcji kryterialnej J. Rozwiniemy
p
y
mod
w
szereg Taylora w otoczeniu
p i ograniczymy rozwinięcie do czynnika liniowego. Tak, więc odpowiedź modelu,
w otoczeniu minimum, przyjmie postad:
p
p
S
p
y
p
p
p
y
p
y
p
y
p
p
p
mod
mod
mod
mod
Zauważmy, że w minimum funkcji kryterialnej J, tzn. w punkcie o współrzędnych
p
,
p
J
jest
wektorem zerowym i do powstałego w ten sposób równania podstawmy powyższe wyrażenie na
p
y
mod
. Po
odpowiednich przekształceniach otrzymujemy wyrażenie:
1
p
p
p
S
S
S
e
p
p
T
T
T
gdzie
p
y
y
e
mod
to tzw. błąd residualny.
Poszukiwanie wyrażenia na błędy estymat parametrów sprowadza się do poszukiwania macierzy
wariancji-kowariancji
p
P
tych estymat:
T
def
n
n
E
p
p
p
p
p
p
P
, gdzie E jest operatorem wartości oczekiwanej.
Po uwzględnieniu przedstawionych powyżej zależności, i po odpowiednich przekształceniach, wyrażenie
na macierz wariancji-kowariancji estymat parametrów modelu przyjmuje postad:
1
1
p
p
p
p
p
p
S
S
S
e
e
S
S
S
P
T
T
T
T
n
n
E
p
p
Powyższe wyrażenia upraszcza się, gdy założymy, że błąd residualny jest szumem białym, tzn.: próbki błędu są
nieskorelowane (pozadiagonalne elementy macierzy
T
e
e
są zerowe) wartośd oczekiwana błędu jest równa
zero a kowariancja (elementy z głównej przekątnej) jest stała i wynosi
2
, czyli
p
p
n
n
T
E
I
e
e
2
, a wówczas:
1
2
p
p
S
S
P
T
n
n
p
p
Macierz powyższa jest symetryczna, gdyż kowariancje są parami symetryczne.
Elementy macierzy S to czułości odpowiedzi na zmiany parametrów. Gdy zmiany pewnego parametru
r
p
nie mają wpływu na odpowiedź, to cała r-ta kolumna macierzy S (odpowiednio cały wiersz macierzy
T
S
)
będzie zerowa. Jeśli tak, to macierz
S
S
T
będzie miała jedną (lub więcej) zerową kolumnę i wiersz. W rezultacie
macierz
S
S
T
stanie się osobliwa (
0
p
p
S
S
T
det
) a wówczas błędy estymat staną się nieskooczenie wielkie:
p
p
p
p
p
p
S
S
S
S
S
S
P
T
T
T
n
n
det
adj
p
p
2
1
2
Zauważmy, że zerowa czułośd odpowiedzi względem jakiegoś parametru oznacza, że model nie jest
strukturalnie identyfikowalny. Jednak nawet wtedy, gdy strukturalna identyfikowalnośd modelu została
wcześniej potwierdzona, może zdarzyd się, że macierz
S
S
T
jest bliska osobliwej. Jest tak między innymi wtedy,
gdy występuje silna wzajemna zależnośd pomiędzy parametrami, czyli ma miejsce silna korelacja pomiędzy
wierszami i kolumnami macierzy
S
S
T
. Odwracanie takiej, bliskiej osobliwej, macierzy
S
S
T
daje bardzo duże
wartości elementów macierzy wariancji-kowariancji.
Reasumując, macierz
S
S
T
powinna byś nieosobliwa, a czułości S duże. Jednak nawet wtedy mogą
wystąpid duże błędy estymat, gdy
2
jest wielkie.
5. Jakośd modelu – matematyczna kryteria jakości
Matematyczne kryteria jakości to : kryterium informacyjnym Akaike oraz kryterium Schwarza, zwanym także
kryterium MDL (minimum description length).
Zgodnie z kryterium Akaike AIC najlepszy spośród potencjalnych modeli jest ten, który zapewnia dobre
dopasowanie oraz równocześnie opisany jest przez niewielką liczbę parametrów. Kryterium to ma postad:
(
)
Kryterium Schwarza SC, (MDL), jest następujące:
(
)
Pierwszy człon FC(popt) związany jest z dokładnością dopasowania odpowiedzi modelu do danych
pomiarowych – jest to wartośd funkcji celu w rozwiązaniu optymalnym, czyli jej minimalna wartośd.
Drugi człon to funkcja kary za zbyt dużą liczbę parametrów modelu np. Kryterium Schwarza nakłada
dodatkowe kary na te modele, które do uzyskania dobrego dopasowania wymagają większej liczby pomiarów
N. Jest to kara za nieprzestrzeganie zasady oszczędności.
6. Na czym polega badanie indentyfikalności modelu metodą transformacji Laplace’a?
Badanie indentyfikalności modelu metodą transformacji Laplace’a bazuje na analizie operatorowej funkcji
przenoszenia G(s). Najprościej można to opisad jako przeniesienie funkcji z dziedziny czasu to dziedziny
częstotliwości (j ).
Załóżmy sygnał w chwili czasu zależny zarówno od pobudzenia jak i od stanu poprzedniego z nadanym
warunkiem początkowym
̇( ) ( ) ( ) ( )
Oraz sygnał wyjścia
( ) ( )
Gdzie ( ) to sygnał pobudzenia.
Przyjmijmy że sygnały mają postacie kolumnowych wektorów:
T
t
x
t
x
t
x
t
3
2
1
,
,
x
T
t
y
t
y
t
y
t
y
t
4
3
2
1
,
,
,
y
T
t
u
t
0
,
0
,
1
u
Przyjmując pobudzenie jako bardzo duży przyrost substancji w bardzo krótkiej chwili czasu, stwierdzamy że
możemy takie pobudzenie potraktowad jako deltę diraca dziedzinie czasu
( ) ( )
Tak więc w dziedzinie częstotliwości będzie miało postad :
( )
Dla każdej pary pobudzenie-odpowiedź należy wyznaczyd operatorową funkcję przenoszenia i zbadad jej
właściwości. W tym celu zapiszemy równania stanu w postaci macierzowej na płaszczyźnie zmiennej
zespolonej s.
( ) ( ) ( ) ( ) ( )
( ) ( )
( )
( )
( )
Poszczególne elementy macierzy G(s) to funkcje przenoszenia od wejścia w obszarze pierwszym (przewód
pokarmowy) do kolejnych wyjśd.
0
0
0
0
0
0
0
0
5
3
4
2
1
5
2
4
2
1
3
4
5
3
4
2
1
4
5
1
5
3
4
2
1
5
2
7
2
1
3
7
5
3
4
2
1
4
6
1
mod
s
p
p
s
p
s
p
p
s
p
p
p
p
p
p
p
s
p
p
s
p
s
p
p
s
p
p
p
s
p
p
s
p
s
p
p
s
p
p
p
p
p
p
p
s
p
p
s
p
s
p
p
s
p
p
p
s
G
Aby rozstrzygnąd kwestię identyfikowalności modelu należy skonfrontowad obliczenia teoretyczne z wynikami
eksperymentu. Po przeprowadzeniu eksperymentu, dla zmierzonych, fizycznych sygnałów, tj. dla pobudzenia i
dla odpowiedzi, wyznacza się transmitancję operatorową. Teraz, w miejscu kombinacji poszukiwanych
parametrów pi, znajdą się wartości liczbowe.
0
0
0
0
0
0
0
0
3
2
2
1
0
1
0
3
2
2
1
0
1
0
3
2
2
1
0
1
0
3
2
2
1
0
1
0
s
s
b
s
b
b
s
e
e
s
s
b
s
b
b
s
d
d
s
s
b
s
b
b
s
c
c
s
s
b
s
b
b
s
a
a
s
pom
G
,
gdzie ai, bi, ci oraz ei to wyznaczone eksperymentalnie wartości liczbowe
Dla poprawnie obranego modelu i dobrze przeprowadzonego eksperymentu stopnie licznika i mianownika
transmitancji Gmod(s) oraz Gpom(s) muszą byd zgodne. Jeżeli ten warunek jest spełniony układa się układ
równao względem poszukiwanych parametrów. Np dla
( )
2
5
4
3
2
1
1
5
2
5
2
5
1
4
3
4
2
4
1
3
2
3
1
0
5
4
2
5
4
1
4
3
2
4
3
1
1
1
5
0
4
1
5
3
2
5
4
3
2
1
5
2
5
2
5
1
4
3
4
2
4
1
3
2
3
1
5
4
2
5
4
1
4
3
2
4
3
1
1
5
4
1
5
31
s
b
p
p
p
p
p
b
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
b
p
p
p
p
p
p
p
p
p
p
p
p
a
p
p
a
p
p
p
s
s
p
p
p
p
p
s
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
p
s
M
M
s
p
p
p
p
p
s
G
Równanie 1 i 2 są liniowo zależne.
W równaniach nie występują p6 i p7.
Parametry w równaniach 3 i 4 uwikłane są w nieliniowe zależności; rozwiązania, które wyznaczymy mogą byd
niejednoznaczne.
Należy sprawdzid wszystkie kombinacje wejście odpowiedź dlatego że w układzie równao algebraicznych w
ogóle nie występują p6 i p7 więc model nie jest strukturalnie globalnie identyfikowalny. W układzie 5 równao
algebraicznych, z których dwa pierwsze są liniowo zależne, występuje 5 parametrów, które są uwikłane są w
nieliniowe zależności, układ ten ma zatem więcej niż jedno rozwiązanie, niektóre parametry są lokalnie
identyfikowalne.
7. Co rozumiemy pod pojęciem zmiennych eksperymentu
Istnieje grupa zmiennych eksperymentu, które możemy kształtowad dla uzyskania eksperymentu
optymalnego. Tworzą one tzw. dziedzinę zmiennych eksperymentu, do której należą:
Pobudzenie ( )
Czas trwania pobudzenia
Dawka pobudzenia ∫ ( )
Energia pobudzenia ∫
( )
Schemat próbkowania odpowiedzi SP
Czas obserwacji
Liczba próbek N i sposób ich rozmieszczania na przedziale obserwacji
8. Twierdzenie Cramera-Rao. Interpretacja fizyczna.
Informacji o parametrach poszukuje się na podstawie próbek zaszumionego sygnału wyjściowego:
r
r
r
t
t
t
,
ε
p
y
z
Taki zbiór danych pomiarowych związany jest z wektorem parametrów za pomocą funkcji gęstości
prawdopodobieostwa warunkowego. Związek ten jest wyrażony za pośrednictwem macierzy informacyjnej
Fishera M, która jest miarą ilości informacji zawartej w zaszumionych danych pomiarowych
p
p
Z
p
p
Z
M
f
f
E
T
log
log
Macierz M, za pośrednictwem twierdzenia Cramera-Rao, określa możliwą do uzyskania dokładnośd estymat
parametrów. Twierdzenie Cramera-Rao głosi, że macierz kowariancji estymat parametrów jest ograniczona od
dołu przez odwrotnośd macierzy informacyjnej Fishera
1
cov
M
p
p
p
p
p
T
est
est
est
E
Podana ogólna postad macierzy Fishera M jest niedogodna do praktycznego wykorzystania, gdyż funkcja
gęstości prawdopodobieostwa warunkowego jest skomplikowana. Przy założeniu, że szum pomiarowy jest
addytywny, jego próbki są nieskorelowane i mają rozkład gaussowski, wyrażenie upraszcza się i przyjmuje tzw.
postad czułościową:
T
j
r
i
r
N
r
r
ij
p
t
p
t
t
σ
m
,
,
1
1
2
p
y
p
y
M
Macierz informacyjna M jest powiązana z poszukiwanymi parametrami modelu p poprzez odpowiedź modelu
y(p,t).
Celem jest uzyskanie estymat o minimalnej kowariancji. Zgodnie z tw. Cramera-Rao, wymaga to zapewnienie
max(M), lub min(1/M). Gdy znajdziemy taki zestaw wartości zmiennych eksperymentu, który zapewni
spełnienie tego warunku, to tak zaplanowany eksperyment uznamy za optymalny z punktu widzenia osiągalnej
dokładności parametrów.
Macierz informacyjną rozpatruje się jako funkcję zmiennych eksperymentu tj. jako funkcję kształtu
pobudzenia, jego czasu trwania, dawki i energii, jako funkcję czasu obserwacji odpowiedzi, liczby pobranych
próbek i schematu próbkowania
SP
N
T
E
D
T
t
u
ob
,
,
,
,
,
,
M
M
Możliwe jest kształtowanie zmiennych eksperymentu tak, aby zapewnid max(M).
9. W jaki sposób zapewniamy warunek minimalnej kowariancji estymat parametrów
modelu w metodach optymalizacji bazujących na twierdzeniu Cramera-Rao ?
Poprzez minimalizację macierzy Fishera (w czułościowej postaci).
Jak należy rozumied pojęcie minimalizacja macierzy? Rozpocznijmy od definicji równości macierzy : dwie
macierze, przykładowo [
] oraz [
], są równe tylko wtedy, gdy mają takie same wymiary oraz gdy dla
każdej pary wskaźników i oraz k zachodzi równośd
. Twierdzenie Cramera-Rao wiąże macierz
kowariancji estymat z macierzą informacyjną Fishera : [
]
. Przyjmijmy lokalnie oznaczenia
[
] [
] to macierz estymat, a [
]
to macierz równa odwrotności macierzy Fishera.
Zgodnie z twierdzeniem Cramera-Rao pożądane jest aby [
] [
] . Oznacza to, że dla każdej pary
wskaźników i oraz k musi zachodzid relacja
, w szczególności dla zachodzi relacja dla wariancji
[
] [
].Wariancje powinny byd możliwie małe. Staramy się to osiągnąd minimalizując wartości macierzy
[
]
.
Jeżeli znajdziemy taki zestaw wartości zmiennych eksperymentu, który zapewni minimum , to tak
zaplanowany eksperyment uznamy za optymalny z punktu widzenia osiągalnej dokładności estymat
parametrów.
10.Na czym polega D-optymalizacja
D-optymalizacja polega na minimalizacji odwrotności wyznacznika macierzy informacyjnej Fishera, lub co jest
równoważne, na maksymalizacji wyznacznika tej macierzy
min
det
1
0
M
M
M
D
h
I
I
p
p
xn
n
h
I
Ω
,
0
Kryterium D-optymalności jest efektywne i stosunkowo łatwe w implementacji. Dzięki tym zaletom jest
chętnie stosowane, zwłaszcza do wyznaczania optymalnych schematów próbkowania.
11.Analogowa i cyfrowa filtracja sygnałów biomedycznych, porównanie, wymagania.
W zasadzie wszystkie sygnały definiujące model, z wyjątkiem zadanego sygnału wejściowego, należy traktowad
jako sygnały stochastyczne.
W filtracji cyfrowej rolę filtru pełnią algorytmy oparte na przekształceniach matematycznych operujących na
zbiorze liczb reprezentujących sygnał. Dzięki stosowaniu metod cyfrowych, proces filtracji jest bardziej
dokładny, a sam filtr cyfrowy jest bardziej odporny na zakłócenia niż filtr analogowy.
Istotną zaletą filtrów cyfrowych jest możliwośd łatwej, bo programowej zmiany parametrów filtracji. Dla
tradycyjnych filtrów, w postaci urządzeo filtrujących, wymaga to zmian konstrukcyjnych.
Filtracja analogowa jest historycznie najstarsza. Rolę filtru pełnią obwody selektywne względem określonych
częstotliwości. Filtracja analogowa polega na tłumieniu częstotliwości na zewnątrz pasma użytecznego.
Pierwszymi filtrami analogowymi były proste układy RLC. Z czasem układy te uległy rozbudowie - powstawały
filtry drabinkowe, filtry Butterwortha, filtry Czebyszewa oraz filtry eliptyczne.
Wśród filtrów analogowych wyróżnia się cztery podstawowe ich typy: dolno przepustowy, górno przepustowy,
środkowo zaporowy i środkowo przepustowy.
W zależności od zastosowanych elementów wyróżnia się następujące typy filtrów:
- filtry pasywne - zbudowane z elementów pasywnych R, L i C,
filtry aktywne - zbudowane z elementów pasywnych R, L i C oraz z elementów aktywnych tj. tranzystorów i
wzmacniaczy operacyjnych.

Mimo tego, że techniki projektowania i budowy filtrów analogowych są obecnie bardzo dobrze rozwinięte,
filtry te mają kilka wad, które powodują, że są one wypierane przez filtry cyfrowe. Do wad filtrów analogowych
zalicza się zmiennośd w czasie ich parametrów, zależnośd tych parametrów od warunków zewnętrznych (np.
temperatura, wilgotnośd) oraz trudności ze zmianą raz ustalonych parametrów
Filtracja cyfrowa to proces obliczeniowy dokonywany na sygnale cyfrowym. Rolę filtru pełnią algorytmy
obliczeniowe.
Na wejściu filtru cyfrowego znajduje się przetwornik a/c, który przekształca syg nał analogowy do postaci
cyfrowej. Częstotliwośd próbkowania układu a/c musi byd co najmniej dwukrotnie większa od maksymalnej
częstotliwości w widmie sygnału wejściowego. Jeżeli ten warunek jest spełniony to, zgodnie z twierdzeniem
Nyquista, na podstawie sygnału próbkowanego, można jednoznacznie odtworzyd sygnał analogowy.
Na wyjściu filtru cyfrowego znajduje się przetwornik c/a przekształcający sygnał cyfrowy do postaci
analogowej - zrobi to jednoznacznie, jeśli częstotliwośd próbkowania na wejściu spełniała warunek twierdzenia
Nyquista.
Z punktu widzenia wejścia i wyjścia filtr cyfrowy i analogowy zachowują się tak samo, inny jest sposób
przetwarzania sygnału.
Podobnie jak w filtracji analogowej, wśród filtrów cyfrowych, wyróżnia się: dolno przepustowe, górno
przepustowe, środkowo przepustowe, środkowo zaporowe.
Zaletą filtrów cyfrowych jest to, że wartości parametrów można realizowad z dużą dokładnością i utrzymywad
na stałym poziomie w czasie pracy. Inną zaletą filtrów cyfrowych jest możliwośd łatwej zmiany parametrów
filtru; są to jedynie zmiany w programie komputerowym, a nie zmiany elementów elektronicznych.
12.Filtracja stochastyczna sygnałów biomedycznych – kiedy i dlaczego?
Sygnał nazywamy deterministycznym, jeżeli każda jego wartośd jest jednoznacznie określona za pomocą
ścisłych zależności matematycznych. Na podstawie tych zależności można dokładnie wyznaczyd wartośd
sygnału w dowolnej chwili.
Pojęcie sygnałów stochastycznych (losowych) jest związane z procesami stochastycznymi a konkretna
obserwowana funkcja-sygnał jest traktowana, jako jedna z wielu możliwych realizacji procesu
stochastycznego.
Sygnał użyteczny i szum charakteryzuje się właściwościami statystycznymi tzn. wartością średnią, wariancją,
kowariancją i rozkładem prawdopodobieostwa.
Mierzone sygnały przedstawia się w postaci sumy szumu i sygnału użytecznego a filtracja polega na możliwie
skutecznym wyeliminowaniu szumu za pomocą odpowiedniej obróbki wyników pomiaru w filtrze.
Teoria filtracji Kalmana, sformułowana w dziedzinie czasu, dotyczy sygnałów niestacjonarnych (tzn. takich,
których parametry statystyczne mogą zmieniad się w czasie). Model systemu musi byd sformułowany w
kategoriach zmiennych stanu.
Do rozwiązania zadania filtracji jest potrzebna znajomośd parametrów statystycznych sygnału i szumu, a także
znajomośd parametrów modelu systemu, który generuje sygnał.
Teoria Kalmana wymaga znajomości modelu systemu.
Modele systemów biomedycznych są tworzone dla ciągłej zmiennej (czas) i opisywane układami równao
różniczkowych. Jednak realizacja filtru Kalmana w postaci programu komputerowego wymaga analizy
sygnałów i systemów dyskretnych. Systemy dyskretne opisywane są za pomocą równao różnicowych.
Rozważmy sytuację:
System pobudzono sygnałem u, zmierzono odpowiedź z – to sygnał zakłócony. Zadanie filtracji Kalmana polega
na znalezieniu informacji o stanie systemu xk w chwili k-tej, k=1,2,…,N, na podstawie pomiarów sygnału
zakłóconego zk dokonanych do chwili k.
Do rozwiązania zadania konieczna jest: macierz układu A i macierz wejścia B. Parametrami filtracji są: macierz
błędu pomiaru R i macierz błędu modelu Q.
Przy odpowiednim doborze R i Q sygnał po filtracji ma zmniejszone zakłócenia, przy niezmienionej postaci.
Stosując filtrację stochastyczną można poprawid jakośd modelowania systemów biomedycznych.
13.Twierdzenie o optymalności pobudzenia o stałej dawce. Znaczenie praktyczne
Obowiązuje twierdzenie:
Dla systemów liniowych z jednym wejściem i z jednym wyjściem, z gaussowskim szumem pomiarowymi (o
wartości średniej zero i o stałej wariancji) pobudzenie impulsowe, spośród pobudzeo nieujemnych o tej samej
dawce, zapewnia minimum dolnego ograniczenia Cramera-Rao macierzy kowariancji estymat parametrów.
1
cov
M
p
p
p
p
p
T
est
est
est
E
Z twierdzenia tego wynika, że pobudzenia optymalne o stałej dawce, mają postad impulsu. Realizacją fizyczną
takiego pobudzenia jest iniekcja lub bardzo szybka infuzja.
Optymalizacja sygnału testującego polega na wyznaczeniu takiego uopt, należącego do zbioru rozwiązao
dopuszczalnych (np. nieujemnych w przypadku systemów biomedycznych), dla którego funkcja celu I(uopt)
osiąga maksimum, tzn.
))
(
(
max
u
I
u
I
opt
M
T
j
r
r
i
r
r
N
r
r
ij
p
t
t
u
p
t
t
u
t
σ
m
,
),
(
,
),
(
1
1
2
p
y
p
y
M
M zależy od pobudzenia u(t) i od parametrów modelu p. Zależnośd ta jest zawarta w odpowiedzi modelu:
t
t
u
,
,p
y
Funkcje celu dla kryteriów D-optymalizacji, L-optymalizacji, A-optymalizacji, E-optymalizacji oraz optymalizacji
czułościowej przedstawione zostały wcześniej. Są one nieliniowymi wyrażeniami optymalizowanej zmiennej
u(t). Na tę zmienną nałożone są dodatkowe ograniczenia na dawkę lub na energię.
Te ograniczenia także są nieliniowymi funkcjami zmiennej u(t). Zastosowanie sygnału dla celów
eksperymentu biomedycznego wymaga nałożenia na ten sygnał dodatkowych więzów.
Praktyka :
Istnieją leki, których nie można podawad z dużą szybkością, gdyż może to prowadzid do poważnych skutków
ubocznych.
Do leków wymagających ograniczonej szybkości podawania należą m.in. leki nasercowe, antybiotyki, leki
przeciwnowotworowe.
W takich przypadkach należy poszukiwad pobudzenia optymalnego w klasie pobudzeo o ograniczonej energii.
Oto kilka przykładów leków, dla których skutki uboczne związane są ze zbyt dużą szybkością ich podawania:
- Lidokaina (lidocaine) - lek nasercowy, przeciwarytmiczny, stosowanym dla przywrócenia regularnej pracy
serca w przypadku arytmii (Pharmindex, 2007). Działanie toksyczne tego leku na centralny system nerwowy
zależy od szybkości podawania leku, od dawki, wagi pacjenta i wydolności jego wątroby.

- Nitrogliceryna (nitroglicerine) - nadmierna szybkośd podawania nitrogliceryny jest równie niebezpieczna, jak
nadmierna dawka i może doprowadzid do zapaści (Pharmindex, 2007).
- Klindamycyny (clindamicine) - antybiotyk, do skutków ubocznych zalicza się zaburzenia, nawet do
zatrzymania akcji serca (Pharmindex, 2007).
- Wankomycyna (vankomicin) - antybiotyk podany w zbyt szybkiej iniekcji powoduje spadek ciśnienia i
duszności (Pharmindex, 2007).
- Etoposidu (etoposide) i rituximabu (rituximab) to leki przeciwnowotworowe (Pharmindex, 2007) - skutki
uboczne rzadziej występują, gdy leki te są wolniej podawane. Szybkie podanie etoposidu prowadzi do
niedociśnienia. Szybkie podanie rituximab powoduje trudności w oddychaniu, skurcz oskrzeli oraz
niedociśnienie.
Wyszukiwarka
Podobne podstrony:
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN
Opracowanie pytań MC KULA MC OMEN 2
Opracowanie Sciaga MC OMEN
Opracowanie wykladow MC OMEN
Opracowanie pytan MC KULA MC OM Nieznany
Opracowanie projektu MC OMEN
Opracowanie Sciaga MC OMEN
Opracowanie wykladow MC OMEN
więcej podobnych podstron