
POSK zminimalizowane jak się dało
MC_OMEN
1. Jaki cel przyświecał podziałowi jednostki centralnej na kilka działających współbieżnie jednostek
funkcjonalnych? Wyjaśnij na przykładzie.
Cel : Przyśpieszenie pracy procesora (wykonywanie czynności jednocześnie)
Koprocesor 8087:
- blok rozkazów sterujących i współpracy z magistralą (pobieranie rozkazów i argumentów, wysyłanie wyników stanu
układu do pamięci, odtwarzanie stanu układu; wykonuje rozkazy sterujące)
- blok rozkazów numerycznych. (operacje na argumentach umieszczonych w bloku rejestrów (stos))
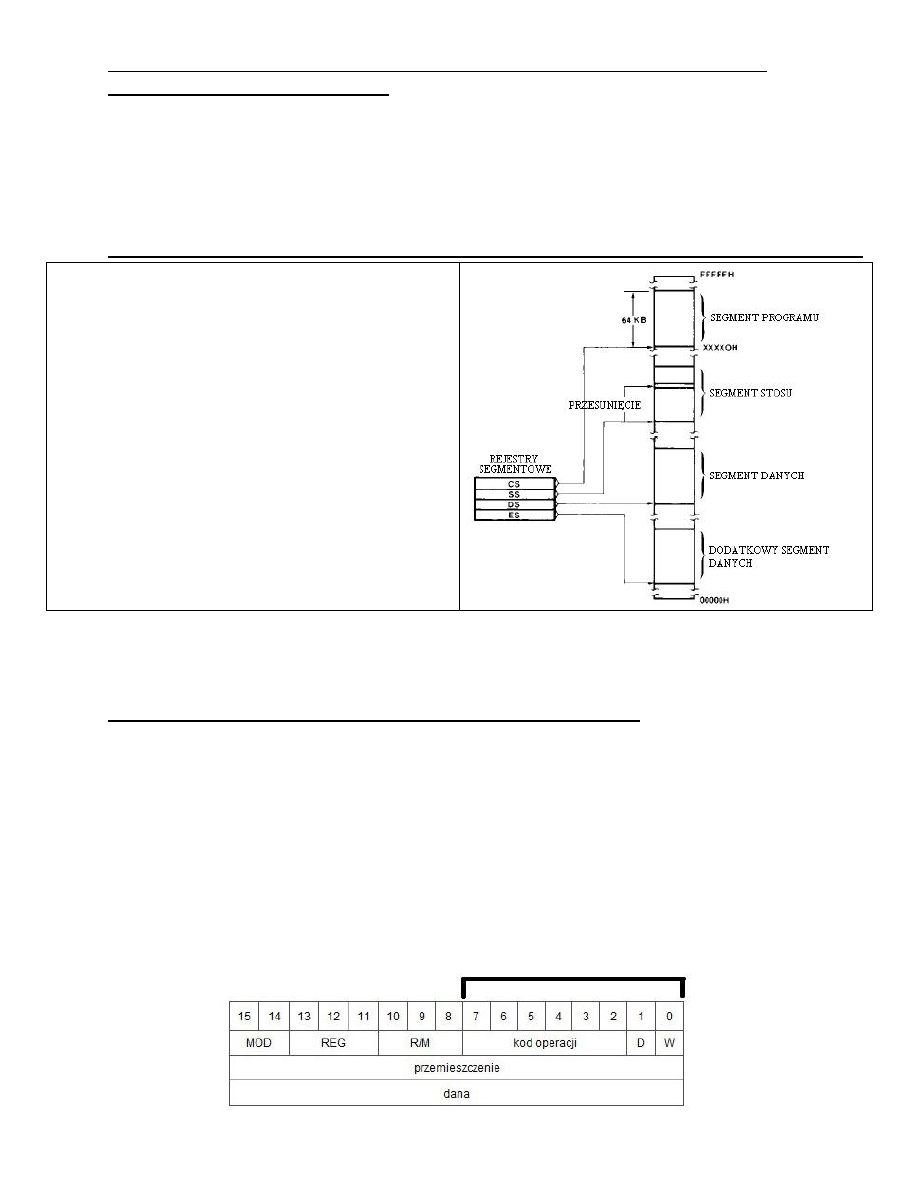
2. Przedstaw ideę i sposób realizacji podziału przestrzeni adresowej mikroprocesora na przykładzie I800 lub Ix86.
Idea: Segmentacja pamięci ->Każdy proces otrzymuje swój
własny obszar pamięci, realizowany poprzez rejestry
segmentowe. Segmentacja pamięci polega na podzieleniu
przez procesor pamięci fizycznej na fragmenty o
określonym początku, rozmiarze, atrybutach i
identyfikatorze. System tworzy takie segmenty na żądanie
aplikacji, przekazując jej jedynie identyfikatory nie
pozwalające na odczytanie parametrów segmentów.
Mikroprocesor 8086 posiada 20-bitową magistralę
adresową. Pozwala ona na zaadresowanie do 1MB pamięci
operacyjnej. Przestrzeo adresowa została podzielona na
segmenty o długości 64kB, rozpoczynające się co 16 bajtów
(kolejne segmenty pamięci mogą nakładad się na siebie).
CS – segment kodu programu, SS – segment stosu, DS –
segment danych, ES – dodatkowy segment danych
I8080
Dla tego przypadku jest 16 bitowa magistrala adresowa pozwalająca na zaadresowanej do 64 kB , 8 bitowa magistrala
danych. Przestrzeo adresowa jest podzielona na segmenty 8 bitowe.
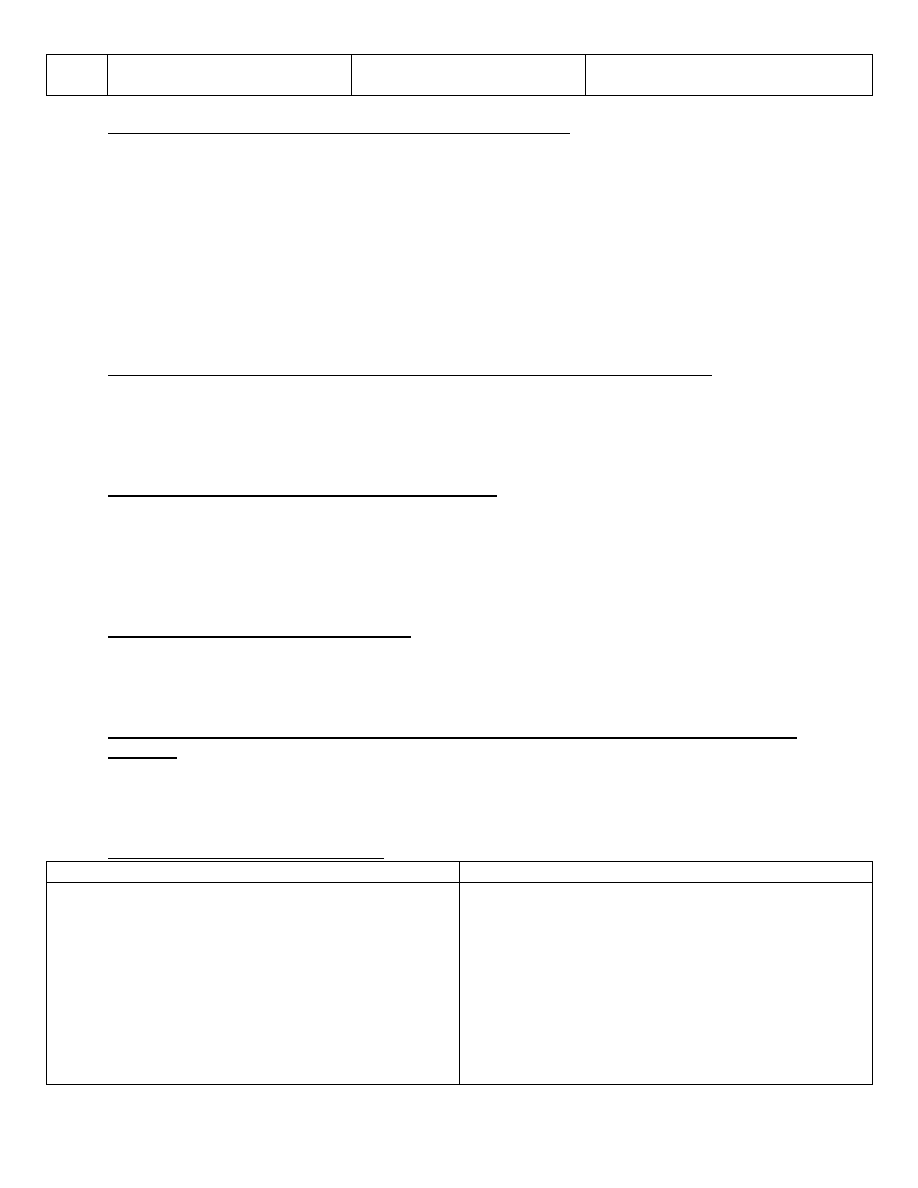
3. Opisz budowę i składnię rozkazu mikroprocesora na przykładzie I800 lub Ix86.
Rozkazy mikroprocesora 8086 są wielobajtowe. Ich liczba (bajtów) zależy od rodzaju rozkazu i może wynosid od jednego
do sześciu. Pierwszy bajt : kod operacji + D+W.
Bit D określa kierunek transmisji (0 - wynik operacji jest przesyłany z rejestru do pamięci, 1 - z pamięci do rejestru). W
zależności od wartości tego bitu w rozkazie rozróżniane są operandy źródłowe i operandy przeznaczenia. Bit W określa
długośd operandu danego rozkazu (0 - operacje bajtowe, 1 - operacje na słowie 16-bitowym).
Jeżeli rozkaz jest wielobajtowy, to drugi bajt rozkazu określa sposób adresowania argumentów. Zawiera on trzy grupy
bitów : MOD określa tryb adresowania, REG określa numer rejestru, w którym znajduje się operand, R/M określa sposób
wyznaczenia miejsca operandu. Trzeci i czwarty bajt to bajty przemieszczenia (jeden lub dwa – w zależności od MOD).
Piąty i szósty bajt to argumenty natychmiastowe.
4. Wymieo i opisz trzy dowolnie wybrane tryby adresowania. Podaj przykłady.
Nazwa
Adresowanie
natychmiastowe
Adresowanie rejestrowe
Adresowanie
bezpośrednie
Opis
Argument pobierany jest
bezpośrednio z rozkazu. W
tym trybie wskazywany jest
wyłącznie operand źródłowy
operandy znajdują się w rejestrach
wewnętrznych mikroprocesora. Jeżeli operand
znajduje się w pamięci, to zespół wykonawczy EY
oblicza jego 16-bitowy adres (przesunięcie)
wewnątrz segmentu. Zespół BIU oblicza adres
rzeczywisty na podstawie otrzymanego
przesunięcia (adresu efektywnego EA) i
zawartości wybranego rejestru segmentowego
adres operandu
znajduje się
bezpośrednio w
rozkazie
Przykład
MOV AX, 20
MOV AX, BX
MOV AX, [40]
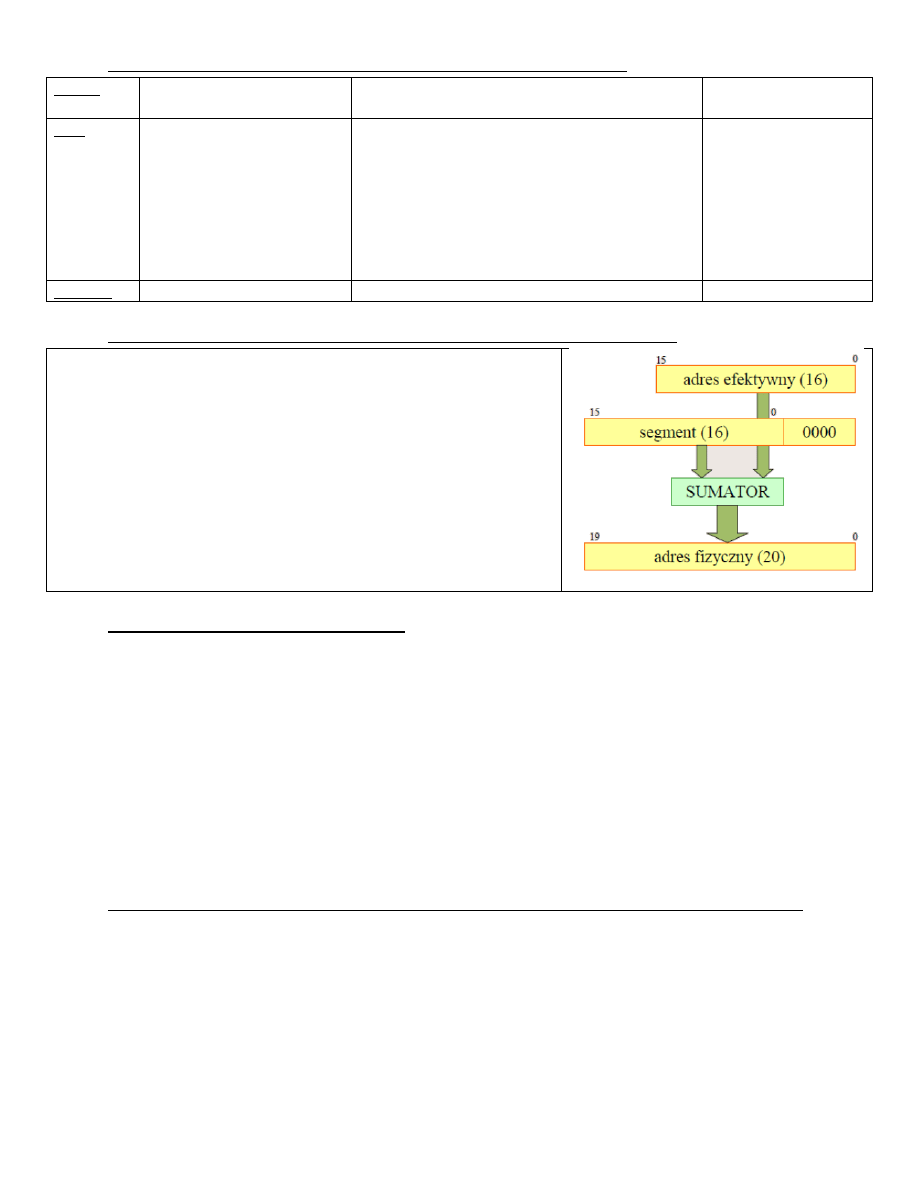
5. Jak przebiega translacja adresu logicznego segment-przesunięcie na adres fizyczny?
Operacja translacji adresu logicznego na fizyczny jest dokonywana przed
wykonaniem każdej instrukcji maszynowej przez procesor. Adres logiczny
składa się z dwóch części:
• 16 bitowej części segmentowej (zawartośd jednego z rejestrów
segmentowych )
• 16 bitowego przemieszczenia (adres efektywny)
co zapisujemy w postaci:
częśd segmentowa : przemieszczenie
adres fizyczny = częśd segmentowa*16 + przemieszczenie
Oznacza to, że przemieszczenie dodaje się do części segmentowej
przesuniętej o 4 bity w lewo, co daje adres 20 bitowy, którym można
zaadresowad 220 = 1048576 bitów = 1MB pamięci operacyjnej RAM.
6. Opisz przebieg cyklu pracy mikroprocesora.
Pobranie (fetch) – kod rozkazu zostaje pobrany z pamięci do zestawu rejestrów tworzących kolejkę rozkazów skąd
trafi do rejestru rozkazów IR procesora;
Dekodowanie (decode) – w tej fazie rozkaz jest dekodowany i ustalane są, jeśli wymaga tego typ rozkazu, połączenia
arytmometru z rejestrami, które mają dostarczyd argumentów operacji
Odczyt (read) – jeżeli rozkaz wymaga argumentu z pamięci operacyjnej, to zostaje obliczony jego adres, a następnie
argument jest odczytywany i wprowadzany do procesora
Wykonanie (execute) – w tej fazie operacja zdefiniowana rozkazem jest wykonywana;
Zapis (write) – jeżeli wynik operacji ma byd umieszczony w pamięci operacyjnej, to zostaje obliczony adres i
wykonany jest zapis do pamięci
Po zapisie modyfikowany jest licznik rozkazów o liczbę zależną od długości rozakzu i jego typu
7. Opisz ideę i podaj przykład wykorzystania mechanizmu oczekiwania mikroprocesora (READY – WAIT).
Wejście Ready – wejście sygnału wskazującego jednostce centralnej obecnośd danych na magistrali. Sygnał jest używany
do synchronizacji CPU z pamięcią lub urządzeniami we/wy, jeżeli po wysłaniu adresu jednostka centralna
mikroprocesora (I8080) nie otrzyma sygnału na wejściu READY wejdzie w stan oczekiwania (WAIT) i pozostanie w nim do
chwili pojawienia się stanu wysokiego na linii READY. Wyjście WAIT – wyjście sygnału potwierdzającego stan oczekiwania
jednostki centralnej na dane. Jeżeli WAIT = 1, to mikroprocesor oczekuje na zgłoszenie gotowości do obsługi układu
zewnętrznego (pamięd, układ we/wy).

8. Przedstaw budowę i objaśnij konstrukcję sprzętu portu wejściowego mikroprocesora pracującego z
potwierdzeniem.
Mikroprocesor 8255 może pracowad w trzech trybach: 0, 1 lub 2. Tryb 1 charakteryzuje:
• porty pracują jako wejście z potwierdzeniem lub wyjście z potwierdzeniem
• przesłanie danych następuje z potwierdzeniem;
• sygnały sterujące przepływem danych przesyłane są liniami szyny PC;
• przesyłane dane są pamiętane (porty A, B).
Natomiast dla trybu 2 jest to:
• przesyłanie danych odbywa się w obu kierunkach tylko poprzez port A;
• sygnały sterujące wysyłane są liniami portu C;
• przesyłane dane (w systemie z potwierdzeniem) są pamiętane;
• port A stanowi dwukierunkowy układ we/wy z potwierdzeniem.
W obu przypadkach stosuje się sygnał wejściowy ACK (acknowledge) – sygnał potwierdzenia odczytu, odebrania danych.
W trybie 1 niski poziom sygnału ACK informuje, że dane kanału A lub kanału B zostały odebrane przez urządzenia
zewnętrzne. W trybie 2 niski poziom na wejściu ACK odblokowuje trójstanowy bufor wyjściowy kanału A, aby wysłał
dane wyjściowe. W innym przypadku bufor wyjściowy znajduje się w stanie wysokiej impedancji.
9. Przedyskutuj wady i zalety trzech mechanizmów przekazania potwierdzenia operacji wejścia/wyjścia do
mikroprocesora.
Nazwa
A-programowe sterowanie I/O z odpytywaniem
(ang. polling):
B-obsługa I/O w przerwaniu:
C-bezpośredni dostęp
do pamięci przez kanał
DMA
Opis
przetwarzanie danych odbywa się całkowicie pod
kontrolą programu realizowanego przez procesor.
// Opis przerwania
Wady
ciężar współpracy przerzucony na procesor i
programistę, który musi znad protokół i
specyfikację techniczną urządzenia, zajętośd
procesora spowodowana okresowym
odpytywaniem urządzenia.
koniecznośd programowej i
sprzętowej obsługi przerwao
(zewnętrzny lub wewnętrzny
kontroler przerwao).
koniecznośd
programowej i
sprzętowej obsługi
transmisji DMA
(wymagany kontroler).
Zalety
przejrzystośd kodu.
obsługa urządzenia
(dodatkowe zadanie dla
procesora) tylko wtedy, gdy
jest zgłaszana taka potrzeba.
wymiana danych bez
udziału procesora. Daje
to odciążenie procesora
oraz możliwośd
efektywnego
przesyłania danych przy
dużych, podobnych
blokach danych.
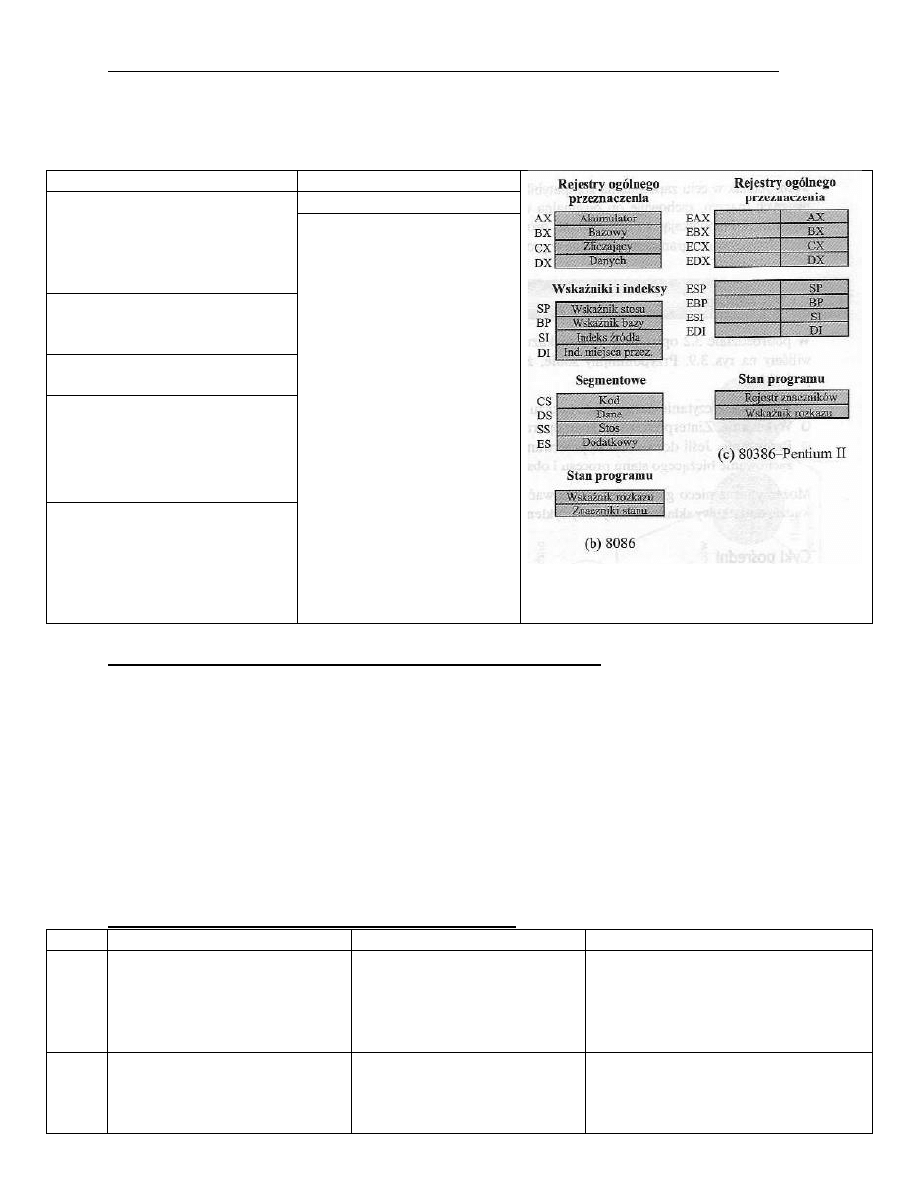
10. Opisz mechanizm kompatybilności w dół na przykładzie organizacji rejestrów mikroprocesora x86.
Kompatybilnośd wsteczna - cecha standardu, urządzenia lub oprogramowania, dzięki której - mimo zmiany
funkcjonalności - nowa wersja umożliwia współpracę z całym otoczeniem starej wersji i jej wszystkimi komponentami.
Mówi się wtedy o rozszerzeniu funkcjonalności. W przypadku mikroprocesora rodziny x86 organizację rejestrów można
przedstawid schematycznie:
8086
80386
Każdy rejestr jest
wyspecjalizowany, chociaż
niektóre z nich mogą również
służyd jako rejestry ogólnego
przeznaczenia.
Rejestry 32-bitowe
W celu zapewnienia
kompatybilności programów
napisanych dla wcześniejszych
maszyn procesor 80386
zachowuje oryginalną
organizację rejestrów
osadzoną w nowej organizacji.
Dla architektów procesorów
jest to znaczne ograniczenie
projektowe, które zmniejsza
swobodę w projektowaniu
organizacji rejestrów.
Podobną kompatybilnośd
zachowano dla trzeciej
generacji procesorów z
rodziny x86, czyli procesorów
64-bitowych.
4 16-bitowe rejestry danych,
adresowalne na podstawie 8- lub
16-bitowej,
4 16-bitowe rejestry wskaźnikowe
i indeksowe
W odniesieniu do niektórych
rozkazów rejestry danych mogą
służyd jako robocze. W odniesieniu
do pozostałych rozkazów są one
używane domyślnie
Specjalizacja rejestrów umożliwia
uzyskanie zwięzłego kodu kosztem
elastyczności.
Wskaźnik rozkazu i zespół 1-
bitowych znaczników stanu i
sterowania
11. Wymieo i opisz znaczenie dla mikroprocesora rejestrów segmentowych.
Rejestr segmentowy – rejestr procesora stworzony do przechowywania adresu początkowego obszaru pamięci, w
którym umieszczone są rozkazy, dane albo stos programu. Rejestry segmentowe są realizacją idei segmentacji pamięci i
lokalności danych. W trybie rzeczywistym adresy mają 20 bitów. Natomiast rejestry mają 16 bitów. Zatem by uzyskad
fizyczny adres komórki pamięci zawartośd rejestru segmentowego mnoży się razy 16 (aby uzyskad przesunięcie w prawo
w segmencie o 4 bity – 24, czyli brakujące 4 bity do 20 bitów adresu rzeczywistego wypełnia się zerami) i dodaje
przesunięcie (OFFSET) (odległośd od początku segmentu). W trybie chronionym rejestry segmentowe zawierają
selektory, które wskazują na pole w tablicy deskryptorów. Z wskazanego elementu tablicy deskryptorów procesor
pobiera 32-bitowy adres bazowy (w przypadku 80286 deskryptor zawiera jedynie 24-bitowy adres bazowy), który
sumowany jest z przesunięciem. Tak powstaje adres liniowy, który przy włączonym mechanizmie stronicowania zostaje
poddany transformacji na adres fizyczny. Uwaga: w tym trybie zawartośd rejestru segmentowego nazywana jest
selektorem!
12. Jaką rolę odgrywają flagi I, D oraz T w mikroprocesorze x86.
Nazwa IF (interrupt flag)
DF (direction flag)
TF (trap flag)
Opis
znacznik przerwao
znacznik kierunku, wskazuje, czy
zawartości rejestrów SI i DI mają
byd zwiększane lub zmniejszane
o jeden w czasie wykonywania
operacji łaocuchowych
znacznik pułapki umożliwiającej pracę
krokową
1
zezwolenie na przyjmowanie
przerwao
- rejestry są zmniejszane
praca krokowa włączona,
mikroprocesor po wykonaniu każdego
rozkazu wykona skok do odpowiedniego
podprogramu obsługi przerwania
0
brak zezwolenia na przyjmowanie
przerwao z wejścia INT
rejestry są zwiększane
praca krokowa wyłączona
13. Opisz czynności j.c. związane z przyjęciem przerwania sprzętowego.
Przerwania są sprzętowym mechanizmem służącym do zawiadamiania procesora o rozmaitych zdarzeniach. Procesor ma
tzw. linię zgłaszania przerwao, którą bada po wykonaniu każdej instrukcji.
Sygnał przerwania -> przerwanie aktualnego ciągu instrukcji -> zapamiętanie stanu na stosie -> wykonanie instrukcji
przerwania -> powrót do przerwanego ciągu instrukcji.
Rozróżnianie przerwao :
• odpytywanie - procedura obsługi przerwania pyta się kolejno wszystkich urządzeo, czy to nie one spowodowały
przerwanie; rozwiązanie to jest stosowane wówczas, gdy mamy tylko jeden rodzaj przerwao,
• wektor przerwao - w systemie może byd wiele rodzajów przerwao, a każdemu rodzajowi odpowiada osobna procedura
obsługi; adresy tych procedur są przechowywane w tablicy systemowej nazywanej wektorem przerwao; rozwiązanie to
jest bardziej efektywne niż odpytywanie.
14. Przedstaw algorytm wyznaczania adresu fizycznego operandy dla rozkazu MOV r, [SI+d].
W generatorze adresu fizycznego określony jest adres rozkazu MOV (w segmencie kodu programu). Następnie do
zawartości rejestru źródłowego SI (source index) dodawana jest wartośd d. Po raz kolejny w generatorze adresu
fizycznego wyznaczany jest adres argumentu w segmencie danych, na podstawie wartości SI + d. Ostatecznie do rejestru
r wpisywany jest znaleziony argument.
15. O czym decyduje przyjęcie określonego modelu pamięci?
Określenie modelu pamięci jest związane z jej podziałem. Operacje wykonywane w 1 segmencie nazywamy bliskimi,
wykonywane w wielu segmentach to operacje dalekie. Użycie modeli pamięci TINY, SMALL i COMPACT pozwala na
odwołania bliskie, LARGE i HUGE na odwołania dalekie. Wywołania bliskie są szybsze, prostsze i oszczędniej wykorzystują
pamięd i stos. Model pamięci trzeba dostosowad do programów wywołujących, modułów bibliotecznych i rozmiarów
programu.
16. Co to jest i do czego służy kolejka rozkazów?
Jest to 6-bajtowa pamięd zorganizowana w słowa (3x 2bajtowe komórki) wykorzystywane przez mikroprocesor do
przechowywania pobranych wcześniej rozkazów. Służy do przyspieszania pracy procesora poprzez pobieranie rozkazów
w czasie, w którym procesor nie wykorzystuje szyny danych.
17. Dlaczego liczby 16-bitowe powinny byd umieszczone w pamięci pod adresem parzystym? Odpowiedź
uzasadnij.
Wynika to ze sposobu dostępu do pamięci w zależności od wartości sygnału BHE i bitu adresu A0. Jeśli liczba 16-bitowa
jest umieszczona pod adresem parzystym, to jej transfer jest przeprowadzony w jednym cyklu maszynowym. W
przeciwnym razie do transferu liczby 16-bitowej potrzeba dwóch cykli maszynowych.
18. Porównaj cechy architektury CISC i RISC.
CISC
RISC
Zawierają ograniczony, prosty zbiór instrukcji.
Zawierają dużą liczbę uniwersalnych rejestrów.
Instrukcje arytmetyczno-logiczne wykonywane są na
rejestrach.
Kody instrukcji są stałej długości, typowo 16 bajtów, i
maja stałe rozmieszczenie pól, co ułatwia dekodowanie.
Posiadają mała liczbę trybów adresowania.
Występują skomplikowane instrukcje wspierające języki
wysokiego poziomu.
Zawierają mała liczba rejestrów i/lub rejestry
specjalizowane.
Instrukcje arytmetyczno-logiczne mogą pobierad
argumenty z pamięci i umieszczad wynik w pamięci.
Kody instrukcji maja zmienna długośd, typowo od jednego
do kilkunastu bajtów. Występuje prefiksowanie instrukcji
utrudniające dekodowanie.
Posiadają dużą liczbę trybów adresowania.
19. Na czym polega większa efektywnośd rozkazów operujących na łaocuchach (ciągach) w stosunku do ciągu
klasycznych rozkazów tworzących pętlę programową?
Rozkazy operujące na ciągach słów posługują się indeksami. Rejestry SI i DI zawierają adresy efektywne pierwszego
słowa odpowiednio w ciągu źródłowym i wynikowym. Po każdej transmisji wartości rejestrów indeksowych są
automatycznie inkrementowane lub dekrementowane w zależności od ustawienia bitu flagi D w rejestrze flag. Większa
efektywnośd polega na braku konieczności pobierania za każdym razem instrukcji.
20. Czym różni się skok zwykły od skoku ze śladem?
Instrukcja skoku ze śladem wykonuje skok po uprzednim zapamiętaniu wartości rejestru PC. Podczas wykonywania
instrukcji skoku ze śladem PC wskazuje następną instrukcję po instrukcji skoku, i taka właśnie wartośd PC podlega
zapamiętaniu. Instrukcja skoku ze śladem służy do przekazania sterowania do procedury (wywołania procedury).
Instrukcja powrotu według śladu jest instrukcją skoku, której adres docelowy jest uprzednio zapamiętanym adresem
śladu wywołania, czyli adresem wskazującym następną instrukcję po ostatnio wykonanej instrukcji skoku ze śladem.
Czyli generalnie: Zapamiętujemy adres miejsca, skąd został wykonany skok. I tak układamy kolejne adresy na stos
Możemy zatem, cofając się, wrócid aż do punktu wyjścia. Skok ze śladem - rozkaz CALL – zapisuje na stosie adres
powrotu do procedury (adres następnej instrukcji) – jest to albo IP albo CS:IP w zależności czy skok był wewnątrz
segmentu czy między segmentami. Wewnątrz procedury znajduje się rozkaz RET, który pobiera ze stosu adres powrotu ,
ustawiając się tym samym za instrukcją CALL, która oryginalnie spowodowała wykonanie procedury. W przypadku skoku
bez śladu – rozkaz JMP – nie zapisuje się nigdzie ślad powrotu do procedury wywołującej.
21. Porównaj konsekwencje wywołania podprogramu bliskiego oraz odległego.
ACALL wywołanie podprogramu (bliskie - adres 11 bitowy) ACALL PROCEDURA
LCALL wywołanie podprogramu (dalekie - adres 16 bitowy) LCALL PROCEDUR
Wywołanie podprogramowe dalekie wymaga modyfikacji przesunięcia i segmentu, a bliskie nie. W związku z tym,
zajmuje więcej czasu i pamięci.
22. Do czego może byd wykorzystany rozkaz NOP? Podaj przykład.
NOP - no operation - rozkaz pusty.
Umożliwia odliczanie czasu, gwarantuje,że żadne informacje zapisane w rejestrach nie ulegną zmianie, jedynie zajmuje
kilka jednostek czasowych. Jego wykonanie nie wywołuje żadnych efektów, zajmuje jedynie czas 1 cyklu maszynowego.
Często jest on wykorzystywany jako rezerwacja miejsca pamięci przeznaczonego na późniejszą rozbudowę programu
(daje szansę na przyszłe uzupełnienie programu o dodatkowe rozkazy, bez jego ponownej asemblacji), lub jako
niewielkie (1 cykl) opóźnienie w wykonywaniu programu.
23. Na czym polega wektorowy system przerwao?
Najbardziej zaawansowanym i często stosowanym jest system przerwao wektoryzowanych. W systemie tym na sygnał
potwierdzenia przyjęcia przerwania przez jc urządzenie, które zgłosiło przerwanie, podaje na szynę danych kod
identyfikacyjny, który jest traktowany jako numer elementu w wektorze przerwao. Zatem każdemu przerwaniu
przypisany jest adres obsługi przerwania w pamięci programu. W tym systemie każdemu przerwaniu jest przypisany na
stałe priorytet. Jeżeli pojawi się w tym samym czasie kilka przerwao to najpierw obsługiwane jest to o najwyższym
priorytecie, a następnie według ważności priorytetów kolejne przerwania. Często przerwanie o wyższym priorytecie
może przerwad obsługę przerwania o niższym (nigdy nie odwrotnie). Wymaga on użycia osobnego, programowalnego
kontrolera przerwao (ang. PIC). Ten kontroler połączony jest z procesorem. Jeśli urządzenie peryferyjne zgłosi
przerwanie, to kontroler je identyfikuje i przekazuje jego numer procesorowi. Numer ten jest indeksem w tablicy
wektorów przerwao (ang. ivt). Wartościami tej tablicy są adresy procedur obsługi przerwao. Każde przerwanie może
więc mied własną procedurę obsługi. Tablica ta umieszczana jest zazwyczaj na początku pamięci operacyjnej komputera
(rzadko na koocu) i wraz z procedurami obsługi przerwao stanowi częśd systemu operacyjnego.
24. Do czego służy mechanizm pracy krokowej mikroprocesora?
Praca krokowa polega na wykonywaniu pojedynczych cykli rozkazowych lub cykli procesora. Po wykonaniu kolejnego
kroku mikroprocesor zatrzymuje się bądź przechodzi do wykonywania programu sterującego zwanego monitorem.
Dzięki temu istnieje możliwośd kontroli stanu mikroprocesora i pamięci w trakcie wykonywania programu.
25. Jak działa przerwanie typu T (pułapka)?
Przerwanie, które następuje po wykonaniu jednej instrukcji, a przed wykonaniem nastepnej. Procedura obsługi takich
przerwao wraca do tej niewykonanej instrukcji i ją wykonuje. Zatem w działaniu programu nie ma żadnych
nieregularności - przepływ sterowania jest zwyczajny. Pułapka to sytuacja, która nie jest błędem, jej wystąpienie ma na
celu wykonanie określonego kodu; wykorzystywane przede wszystkim w debugerach; gdy procesor powraca do
wykonywania przerwanego kodu, wykonuje następną, po tej która wywołała wyjątek, instrukcję.
26. Do czego służą przerwania niemaskowalne?
Specjalny rodzaj przerwania występujący w większości architektur procesorów. Tym, co odróżnia je od zwykłego
przerwania, jest brak możliwości zignorowania go (zamaskowania maską przerwao). Obecnie przerwania te używa się
głównie do debugowania kodu programów, który może wyłączad zwykłe przerwania (np. kod systemu operacyjnego).
27. Czym różni się adresowanie jednolite od odrębnego pamięci i urządzeo we/wy?
Jednolite - jednakowe traktowanie przez sprzęt odwołao do pamięci operacyjnej i odwołao do urządzeo wejścia-wyjścia;
w adresowaniu jednolitym porty urządzeo zewnętrznych są odwzorowywane w pamięci operacyjnej; te same rozkazy są
używane do adresowania przestrzeni we/wy i pamięci, przestrzenie są rozdzielone tylko fizycznie. Odrębne – do
adresowania we/wy i do adresowania pamięci używane są różne rozkazy.
28. Czym różni się praca mikroprocesora w trybie rzeczywistym i chronionym?
Tryb rzeczywisty
Tryb chroniony
Wszystkie programy pracujące w trybie rzeczywistym
mogą korzystad tylko z instrukcji 16-bitowych i
współpracowad z 20-bitową architekturą pamięci (1 MB).
Tego typu oprogramowanie z reguły jest jednozadaniowe,
co oznacza, że jednocześnie może byd uruchomiony tylko
jeden program. Ponadto nie ma wbudowanej żadnego
ochrony zapobiegającej wykorzystaniu przez program
obszaru pamięci już przydzielonego innemu programowi
lub systemowi operacyjnemu. Jeśli zatem uruchomiono
więcej niż jeden program, dowolny z nich może
spowodowad zawieszenie całego systemu.
Tryb chroniony umożliwia adresowanie pamięci w
większym zakresie niż 1 MB (tryb rzeczywisty), wprowadza
wiele nowych udogodnieo wspierających
wielozadaniowośd, takich jak: sprzętowa ochrona pamięci
(układ MMU), wsparcie w przełączaniu kontekstu
procesora i wiele innych.
32-bitowy tryb pracy procesora został określony terminem
trybu chronionego (ang. protected mode). Nazwa wywodzi
się stąd, że programy działające w tym trybie otrzymują
własny obszar pamięci, przez co nie dochodzi między nimi
do konfliktów. Tego typu ochrona sprawia, że system jest o
wiele bardziej stabilny, ponieważ programy zawierające
błąd nie mogą w prosty sposób zaszkodzid innym
programom lub systemowi operacyjnemu. Poza tym
program, który się zawiesił, może byd usunięty z pamięci
bez szkody dla reszty systemu.
29. Na czym polega technologia MMX?
Technologia MMX (MultiMedia eXtension technology) operuje na ośmiu 64-bitowych rejestrach danych oznaczonych
mm0, ..., mm7, stanowiących części 80-bitowych rejestrów FPU. To wyklucza jednoczesne użycie FPU i MMX! Rejestry
64-bitowe mieszczą spakowane dane np. 2 słowa 32-bitowe, 4słowa 16-bitowe lub 8 słów 8-bitowych. Można
zatem wykonywad jedną instrukcje od razu na zbiorze danych! Technologia MMX wprowadza 57 nowych rozkazów i 4
typy danych ukierunkowanych na przetwarzanie danych multimedialnych. Wiele algorytmów obliczeniowych
wykorzystuje powtarzające się pętle obliczeniowe i obsługuje niewielkie ilości danych. Pętle stanowią poniżej 10% kodu
aplikacji niejednokrotnie zabierają nawet 90% czasu przetwarzania całego algorytmu. Nowe rozkazy MMX zwiększają
wydajnośd pracy tych najczęściej wykonywanych funkcji. Ich szczególną cechą jest możliwośd łączenia niewielkich ilości
danych w większy ciąg, co pozwala na szybsze równoległe wykonywanie obliczeo na wielu porcjach danych. Poprzednio
przetworzenie pewnego zbioru wymagało wielokrotnego wykonania pojedynczego rozkazu.
.Należy podkreślid, że technologia MMX to tylko rozszerzenie listy rozkazów procesora. Jeżeli program tych instrukcji nie
wykorzystuje, to nie mają one żadnego wpływu na wydajnośd.
Przykłady zastosowao:
• wyświetlanie grafiki trójwymiarowej: przekształcenia geometryczne, cieniowanie,
teksturowanie;

• dekodowanie obrazów JPEG i PNG;
• dekodowanie i kodowanie filmów MPEG (m.in. wyznaczanie transformat DCT i IDCT);
• filtrowanie sygnałów: obrazów statycznych, filmów, dźwięku;
• wyświetlanie grafiki dwuwymiarowej (blue box, maskowanie, przezroczystośd);
• wyznaczanie transformat: Haara, FFT.
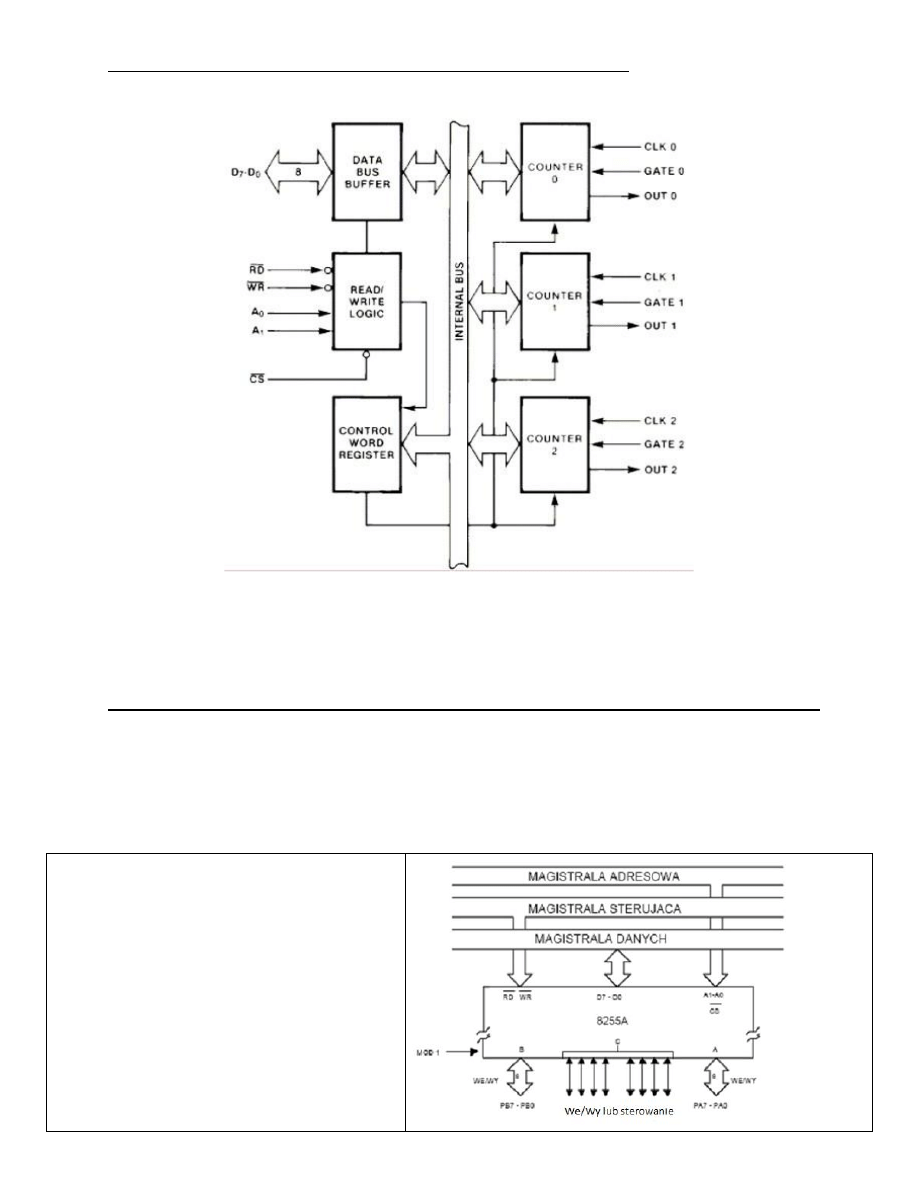
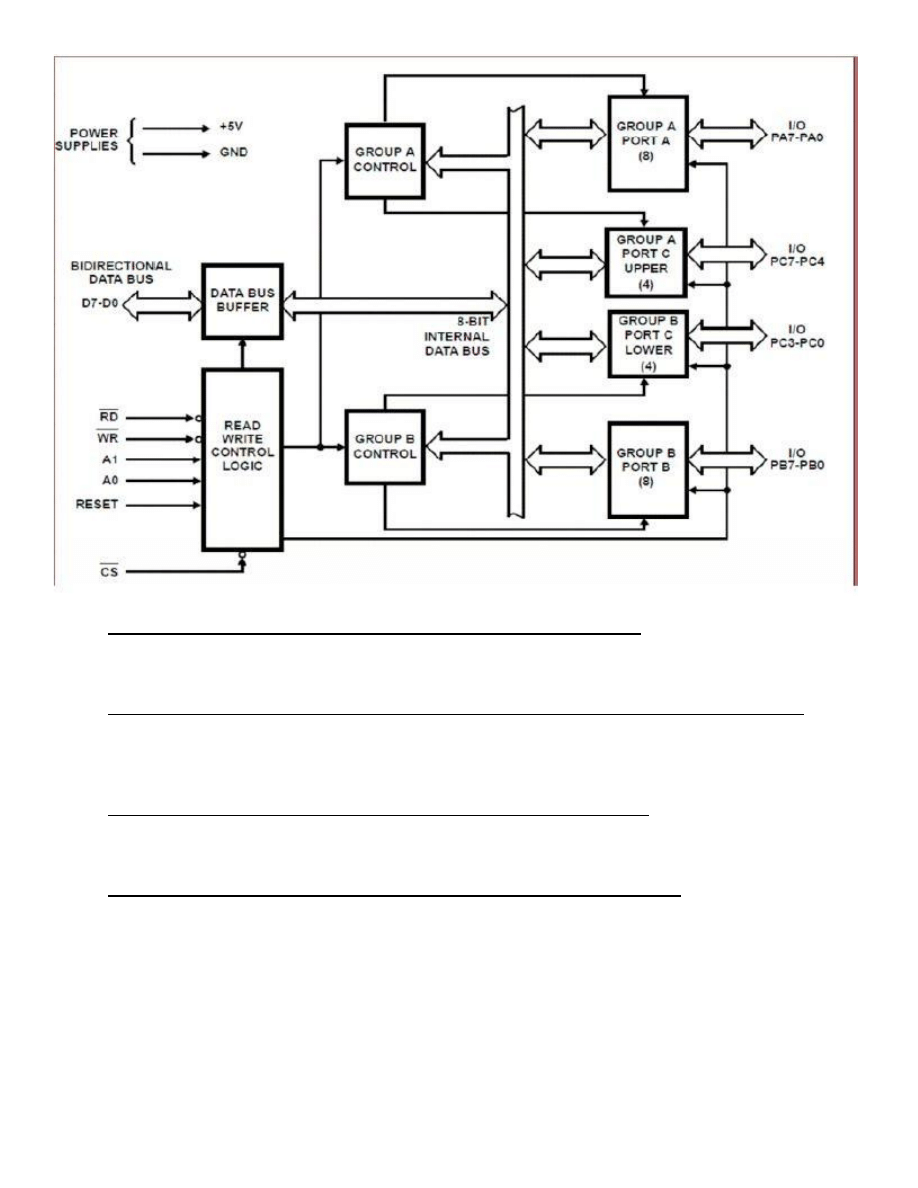
30. Opisz budowę i możliwości układu sprzęgu równoległego 8255.
Port 8255 jest programowalnym układem wejśd/wyjśd równoległych, zajmuje 4 komórki przestrzeni adresowej (trzy z
nich to adresy bram, czwarta to adres rejestru sterującego). Moduł został przystosowany do współpracy z magistralą
procesora 8080 z kontrolerem 8228. Na układ 8255 składają się:
• trzy 8-bitowe porty (bramy PA, PB, PC) mogące pracowad jako wejścia lub wyjścia
równoległe;
• bufor magistrali danych;
• rejestr sterujący RS (pozwala na określenie sposób działania bram).
Linie we/wy można łączyd w dwie, trzy lub cztery grupy w zależności od zaprogramowanego trybu pracy. Funkcje
spełniane przez poszczególne porty, programuje się poprzez przesłanie odpowiednio przygotowanego 8-bitowego słowa
sterującego z jednostki centralnej do rejestru sterującego (RS). Sam proces programowania modułu polega na wyborze
jego trybu pracy oraz określeniu statusu każdej z bram (tzn. czy ma pracowad jako wejście czy jako wyjście). Przesył
danych między CPU a układem 8255 odbywa się poprzez szynę danych. Standardowe sygnały przekazywane między
modułem sprzęgającym a procesorem to:
- 8-bitowa dwukierunkowa magistrala danych
- wejścia RD/WR - sterowanie kierunkiem przepływu danych;
- wejścia A0 oraz A1 adresują źródła danych lub miejsce przesłania (PA, PB, PC, RS);
- wejście wybierania układu
- RESET – zerowanie układu
31. Na czym polega idea układu programowalnego np. portu we/wy czy zestawu liczników?
Układ programowalny to taki układ, którego fizyczna struktura wewnętrzna może byd zmieniana pod wpływem róznych
czynników. W wyniku zmian struktury zmieniają się właściwości elektryczne tego układu, a co za tym idzie, także
realizowane funkcje. Istnieje kilka typów układów programowalnych:
jednokrotnie
programowalne
EPROM
EEPROM
w wewnętrznej
strukturze tych
układów
zmieniana jest struktura
ścieżek metalizacji
poprzez ich przepalanie
(niszczenie) lub
tworzenie przez
przepływ
odpowiedniego prądu.
Dzięki temu możemy
zaprojektowad
niemalże dowolną
ścieżkę połączeo
pomiędzy
poszczególnymi
elementami w układzie.
Układ taki można
zaprogramowad jedynie
raz.
zmiana struktury polega nie na przepalaniu
ścieżek połączeo
lecz na zmianach napięcia progowego
tranzystorów w bramkach. W tego typu
układach stosowane są tranzystory z podwójną
bramką (pływającą). Pomiędzy
kanałem a właściwą bramką jest odizolowany
obszar polikrzemu, który posiada
nieskompensowany ładunek, który wpływa na
napięcie progowe tranzystora. Jak
wiadomo napięcie progowe tranzystora
decyduje o tym, dla jakich wartości napięd
będzie on włączany. Manipulację ładunkiem
nieskompensowanym uzyskuje się
poprzez wstrzeliwanie wysokoenergetycznych
elektronów ze złącza dren-podłoże.
Kasowanie takie układu wykonuje się przez
naświetlanie struktury światłem
ultrafioletowym. Dzięki zachodzącemu zjawisku
fotoelektrycznemu elektrony mogą
opuścid bramkę izolowaną.
zasada działania jest identyczna jak
układów EPROM,
jednak to transportu elektronów do
pływającej bramki wykorzystywane jest
zjawisko
tunelowania nośników z kanału
tranzystora. Kasowanie układu odbywa się
elektrycznie, przez przyłożenie
odpowiedniego napięcia do bramki.
Najprostszą strukturą układu PLD
(Programable Logic Device) jest struktura
matrycy bramkowej AND-OR. Matryca taka
posiada programowalną macierz
bramek AND oraz stałą (w układach PAL -
Programable Array Logic) lub także
programowalną (w układach PLA -
Programable Logic Array) macierz bramek
OR.
Przewaga układu PLA nad PAL jest taka, że
każda bramka AND może byd
połączona z każdą bramką OR.
32. Czym różnią się słowa sterujące typu inicjującego i rozkazy wykonawcze? Jak są one odróżniane?
Słowo sterujące określa tryb pracy układu, oraz czy dany port ma pracowad jako wejście, czy jako wyjście. Rozkaz
wykonawczy natomiast ustawia pojedyncze bity na wyjściach układu. Słowa te rozróżnia się przy pomocy rejestru
flagowego.
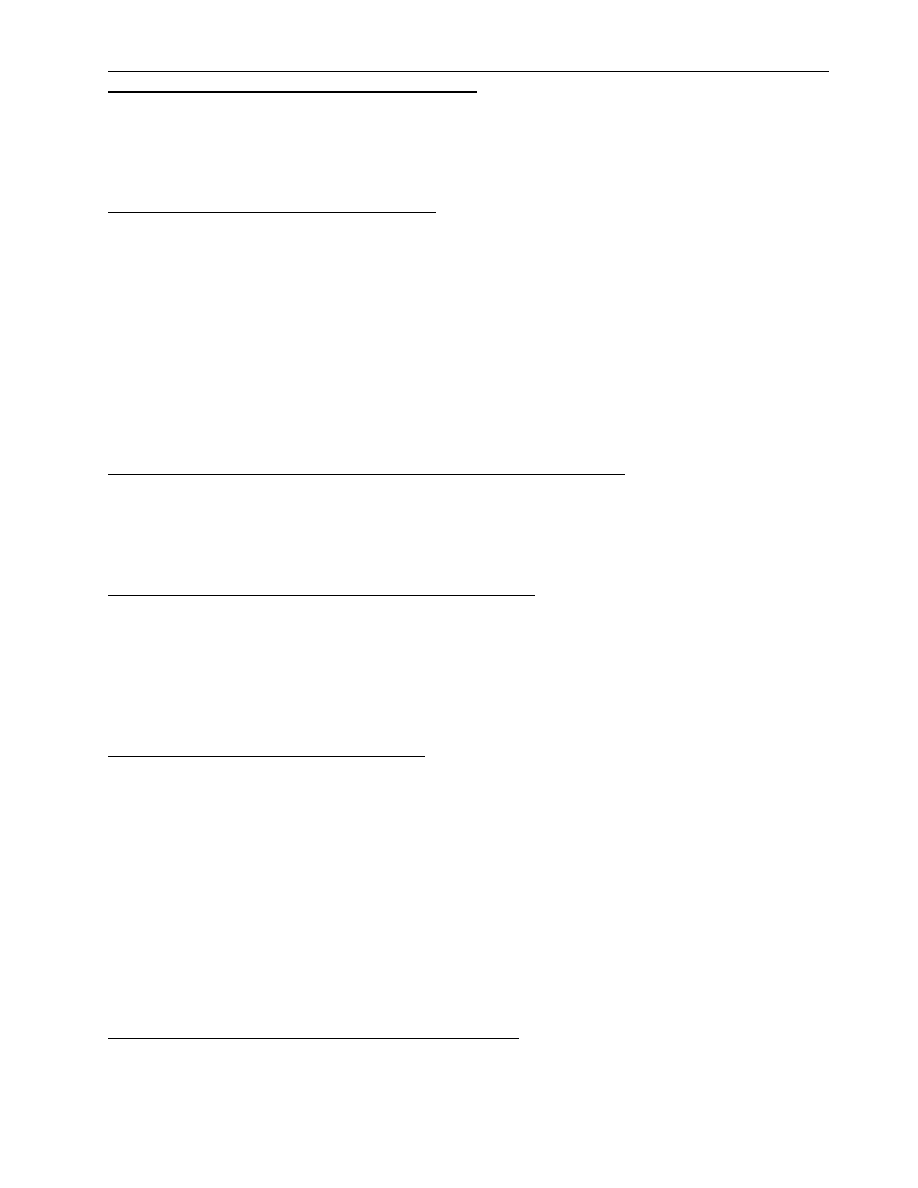
33. Na czym polega tryb pracy bitowej portu C w układzie 8255?
Polega na ustawianiu pojedynczych bitów portu C za pomocą słowa wykonawczego. Możliwe jest selektywne ustawianie
bądź zerowanie poszczególnych bitów tego rejestru. Do tego celu służy zapis do rejestru kontrolnego słowa z
wyzerowanym najstarszym bitem D7.
Bit 7 – zawsze “0”.
Bity D6, D5, D4 – nie używane (dowolna wartośd, zazwyczaj “0”),
Kolejnośd Wybrany bit
Linia
Schemat
000
D0
PC0
001
D1
PC1
010
D2
PC2
011
D3
PC3
…
…
…
111
D7
PC7
Selektywna modyfikacja bitów rejestru C możliwa jest tylko w trybie 0 pracy rejestrów PA lub PB. Jeżeli np. rejestr PA
pracuje w trybie 1 lub 2, a rejestr PB w trybie 0 to można modyfikowad jedynie bity rejestru PCb (z grupy B) i odwrotnie,
dla PB pracującego w trybie 1, a PA w trybie 0, modyfikowalne są tylko bity PCa.
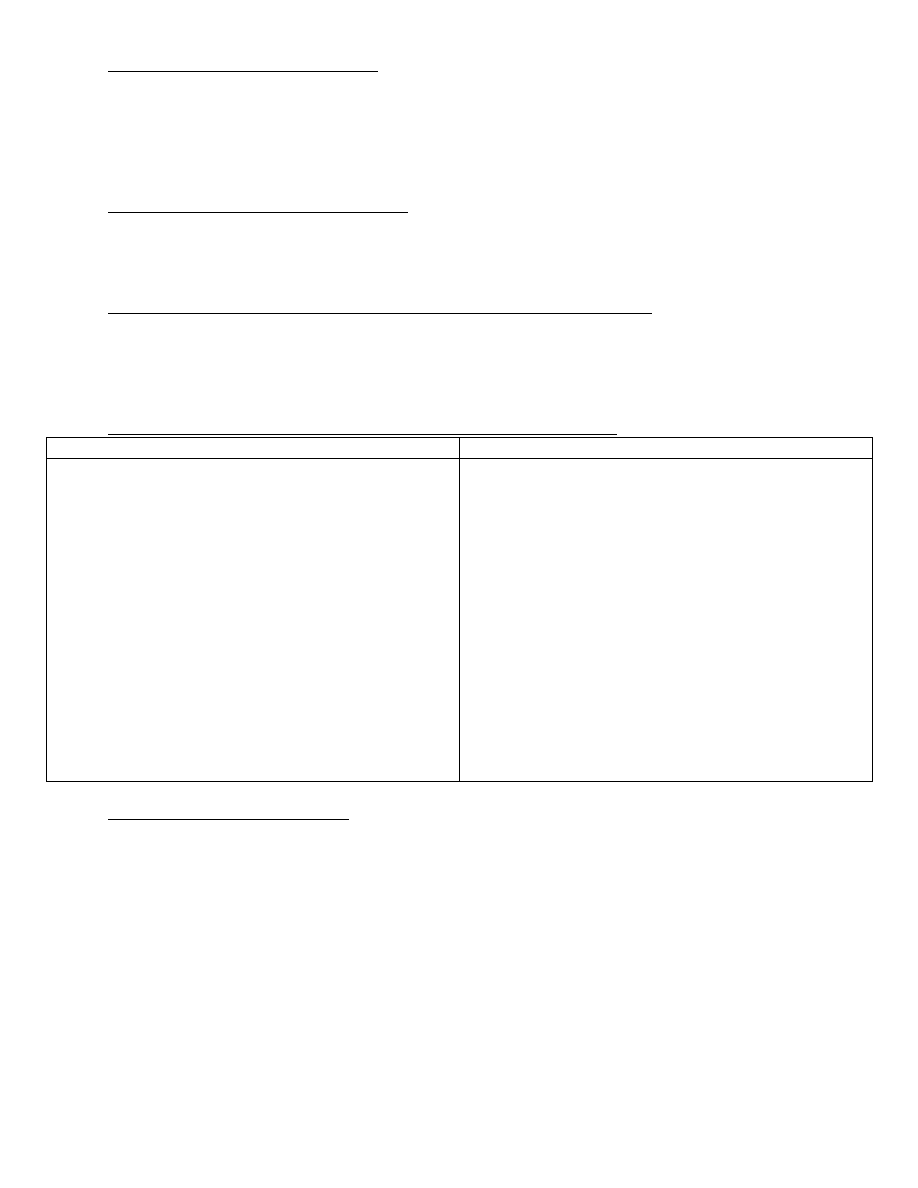
34. Przedstaw przebiegi czasowe ilustrujące proces wymiany informacji z potwierdzeniem.
INTR- żądanie przerwania,
~ACK- potwierdzenie,
~STB - wejściowy sygnał
strobujący,
IBF – wejściowy bufor pełny,
~OBF – wyjściowy bufor
pełny,
~WR – zapis,
~RD – odczyt.
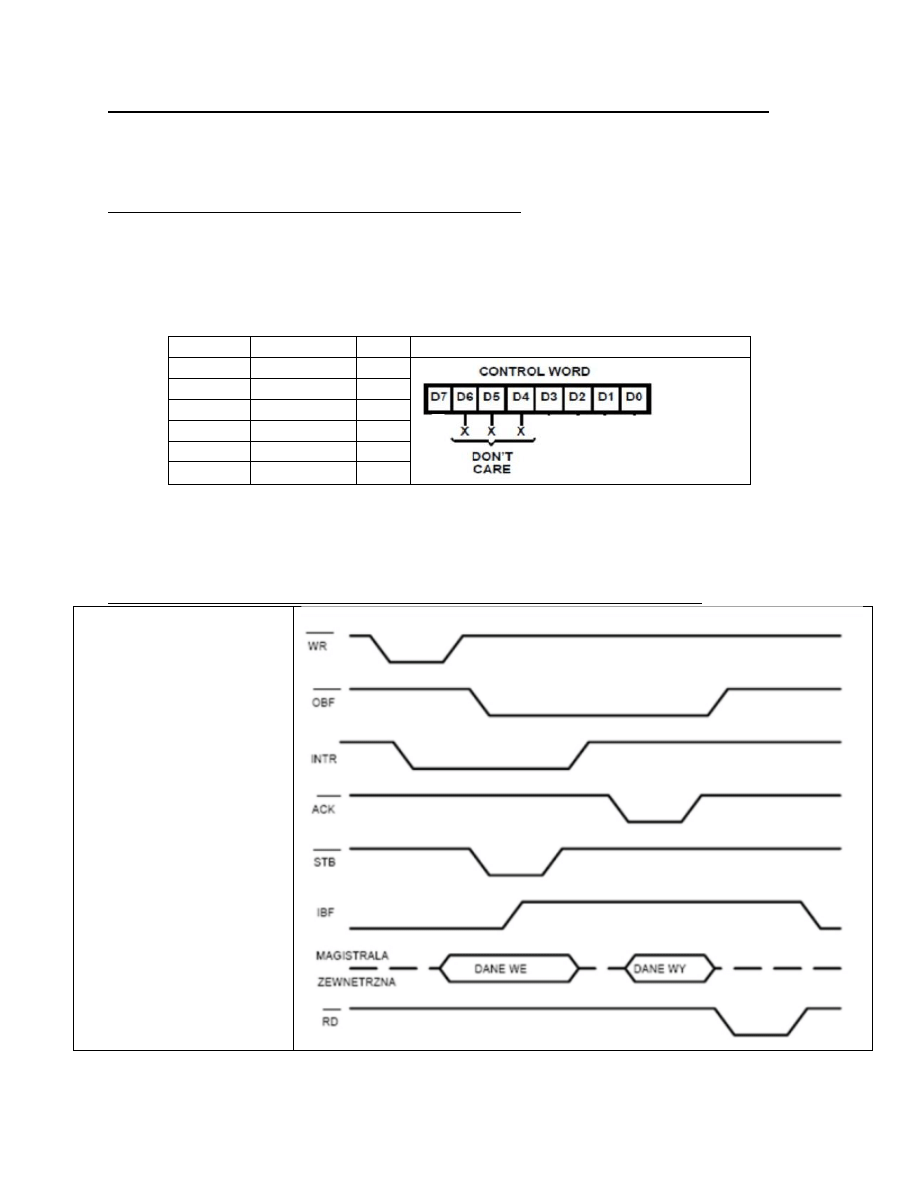
35. Przedstaw budowę i ideę działania układu programowanych liczników 8254.
Możliwośd działania w 6 trybach pracy, które ustawia się przy pomocy wejśd D7-D0. Za pomocą RD/WR odczytujemy,
bądź wpisujemy coś z/do liczników. Wybór licznika następuje poprzez A0,A1. Taktowanie liczników - CLK 0-2, wartości
liczników – OUT 0-2, GATE 0-2 startowanie, blokowanie, zatrzymywanie licznika. Dzięki różnym trybom pracy układ daje
nam możliwośd wygenerowania licznika zarówno w górę, jak i w dół lub sygnał cykliczny z opóźnieniem. By nie popełnid
błędu należy odczytywad wartośd z rejestru, w którym zapisaliśmy chwilową wartośd licznika, a nie z samego licznika.
36. Opisz ideę sprzęgania programowalnego układu z magistralą systemową (na przykładzie 8255 lub 8254).
Sprzęganie układu programowalnego z magistralą ma sens wtedy, gdy zależy nam na dużej prędkości działania. Łączy się
to ze złożonym hardwar'em, a z drugiej strony -nieskomplikowanym softwar'em. Najprościej rzecz mówiąc, układ 8255
zawiera trzy uniwersalne 8−bitowe porty (PA, PB i C), z których każdy może byd skonfigurowany jako wejście, wyjście a w
pewnych trybach spełniad rolę mieszaną, nawet z możliwością generowania przerwao do procesora.
Dodatkowo, oprócz wspomnianych rejestrów portów PA, PB i PC układ 8255 zawiera tzw. czwarty rejestr konfiguracyjny,
dzięki któremu możliwe jest ustalenie, jak ma pracowad cały układ, czy np. port PA ma byd ustawiony jako wejściowy, czy
wyjściowy itp.
-wejścia RD/WR - sterowanie kierunkiem
przepływu danych,
-wejścia A0 oraz A1 adresują źródła danych lub
miejsce przesłania (PA, PB, PC, RS),
- 8-bitowa dwukierunkowa magistrala danych (D0-
D7) – przesyła się przez nie słowa sterujące lub
wykonawcze, czyli programuje tryby pracy.

37. Opisz trzy wybrane tryby pracy programowanych liczników układu 8254.
Licznik 2 może byd programowany przez użytkownika w 6 różnych trybach. Typową wartością częstotliwości na
wejściach zegara jest 1,19 MHz, przetwarzane przez generator taktowania, znajdujący się na płycie głównej. Wejście
GATE licznika 2 sterowane jest przez bit 1 portu B układu PIO.
Tryb
Nazwa
Opis
0
interrupt on
terminal count
Wyjście licznika (Output Interrupt) określone zostaje po otrzymaniu Control Word w
odniesieniu do wartości Low. Liczenie rozpoczyna się po ustaleniu stanu licznika, a taktowane
jest przez wejście CLK. Przy tym wartośd wyjścia ustawiana jest na pozycji High, kiedy tylko stan
licznika osiągnie zero. W takiej sytuacji wyjście jest zamknięte do momentu, w którym
zdefiniowany zostanie kolejny stan licznika Licznik może byd zatrzymany, jeśli na wejściu GATE
ustalona zostanie wartośd Low. Stan licznika zostaje zachowany, po czym - przez ustawienie
wartości High - liczenie jest kontynuowane.
1
programmable
one - shot
Początkowo dla wyjścia (OUTPUT) określona jest wartośd High. Licznik uruchamia się przez
wzrastający sygnał na wejściu GATE (TRIGGER), natomiast wyjściu przypisana jest wartośd Low.
Po uzyskaniu stanu zero licznik zatrzymuje się, a wyjście ponownie ustawiane jest na High. Przy
pomocy wzrastającego sygnału GATE (TRIGGER) można ponownie ustalid stan licznika. Jeśli
impuls pojawi się na wejściu GATE, zanim stan licznika osiągnie wartośd "zero", to nie ma on
żadnego wpływu na aktualnie wyprowadzoną funkcję. Bowiem nowa wartośd jest uaktywniana
dopiero przez kolejny impuls, czyli po zakooczeniu operacji przeprowadzanych aktualnie przez
licznik.
2
rate generator
- dzielnik
częstotliwości)
Podczas występowania sygnału CLK, na wyjściu ustalona jest wartośd Low. Okres od jednego
pojawienia się sygnału na wyjściu do następnego odpowiada początkowemu stanowi licznika.
Jeśli rejestr licznika jest na nowo uruchamiany pomiędzy kolejnymi impulsami, wywołana przez
to zmiana zaczyna oddziaływad dopiero później. Podczas cyklu zerowego stan licznika określany
jest ponownie. Następnie - po jego uruchomieniu - rozpoczyna się liczenie. Wejście GATE może
byd wykorzystywane do synchronizacji licznika. Poprzez sygnał opadający (wcześniej
wzrastający) na wejściu GATE (Reset) przerywany jest proces liczenia, a na wyjściu pojawia się
wartośd High. Sygnał wzrastający na wejściu GATE uruchamia kolejny cykl.
3
generator z
symetrycznym
sygnałem
wyjścia
odpowiada w zasadzie trybowi 2, z tą tylko różnicą, że częstotliwośd dzielona jest przez dwa,
przez co osiągany jest niemal identyczny stosunek sygnałów High i Low. Wyjściu przeznaczona
jest tylko tak długo wartośd High, aż osiągnięta zostanie połowa wartości początkowej licznika.
Następnie na drugą połowę cyklu wyjściu przyporządkowana zostaje wartośd Low. Przy
nieparzystych wartościach początkowych na wyjściu, wartośd High pozostaje o jeden takt
dłużej, niż wartośd Low, po czym automatycznie uruchamiany jest następny cykl
38. Przedstaw architekturę programowalnego układu portów równoległych 8255.
39. Opisz znaczenie linii CLK, GATE i OUT w programowym liczniku z układu 8254?
CLK – wejście zegarowe (Podajemy zasilanie taktem), GATE – wejście bramkujące (Startuje, zatrzymuje, blokuje liczenie)
oraz OUT – wyjście.
40. Porównaj przeznaczenie rejestrów: rejestr rozkazów i wskaźnik (licznik) rozkazów w mikroprocesorze.
Wskaźnik (Licznik) rozkazów (instruction pointer) (program counter) - zawiera adresy komórki pamięci w której
przechowywany jest kod rozkazu przeznaczony do wykonania jako następny. Rejestr rozkazów (instruction register) -
zawiera kod aktualnie wykonywanego rozkazu.
41. Co ogranicza wielkośd przestrzeni adresowej mikroprocesora? Podaj przykłady.
Wielkośd przestrzeni adresowej ogranicza szerokośd magistrali adresowej mikroprocesora, która dla modelu 8086
wynosi 20bitów. To pozwala na zaadresowanie do 1MB pamięci operacyjnej i 4GB przy pomocy segmentacji.
42. Porównaj cykl pracy prostego mikroprocesora I8080 i mikroprocesora z rodziny x86.
Cykl pracy I8080
1. Pobranie z pamięci operacyjnej kodu rozkazu począwszy od adresu umieszczonego w
liczniku rozkazów IP.
2. Dekodowanie rozkazu i przygotowanie stanu procesora do wykonania rozkazu.
3. Wykonanie rozkazu, zmiana zawartości pamięci lub rejestrów procesora.
4. Modyfikacja licznika rozkazów o liczbę zależną od długości rozkazu i jego typu.
Podstawowa różnica w cyklu pracy mikroprocesora z rodziny x86 występuje w pierwszym kroku ze względu na kolejkę
rozkazów. Kod rozkazu zostaje pobrany z pamięci operacyjnej do kolejki rozkazów i dopiero stąd trafia do
rejestru rozkazów procesora.
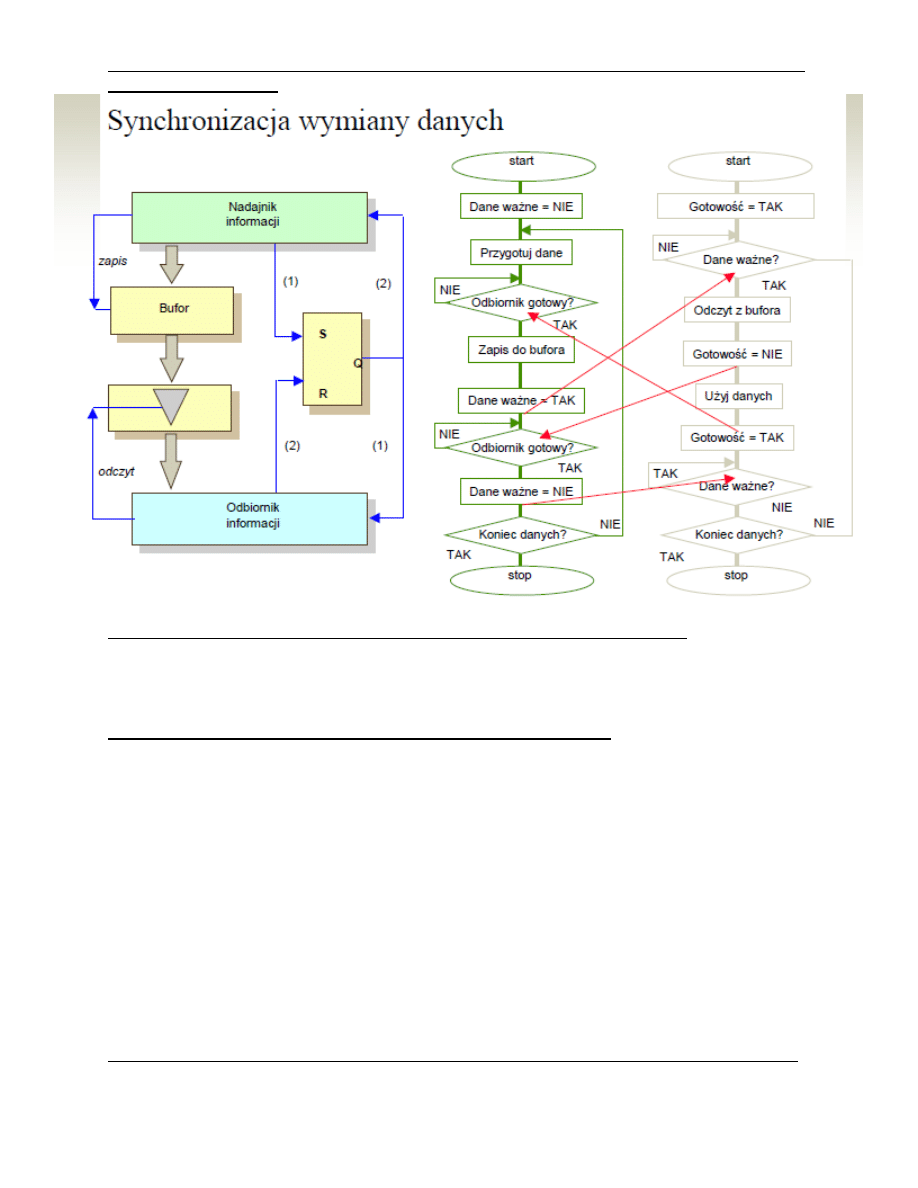
43. Podaj przykład algorytmu wymiany potwierdzeo podczas wymiany informacji pomiędzy nadajnikiem i
odbiornikiem informacji.
44. Do czego służą rejestry zatrzaskowe zawarte w układzie 8254? Odpowiedź uzasadnij.
Po wyzwoleniu odpowiedniego rozkazu zatrzaśnięcia, rejestry zatrzaskowe zapamiętują aktualny stan licznika, aż do
odczytania tego stanu przez procesor. Rejestry te są 8bitowe, zapamiętują 8 starszych i 8 młodszych bitów licznika
16bitowego. Dzięki temu procesor może odczytad stan 16bitowego licznika poprzez 8bitową szynę danych.
45. Na czym polega idea stronicowania pamięci w procesorach z rodziny x86?
Idea stronicowania pamięci w procesorach z rodziny x86 polega na tym, iż została ona wprowadzona przez coraz większe
zapotrzebowanie na pamięd, lecz by móc ją obsłużyd zaistniała potrzeba wprowadzenia nowszych technik zarządzania
pamięcią -> stronicowanie pamięci. Jeśli włączone jest stronicowanie, wówczas cała pamięd (4 GB) dzielona jest na bloki
– strony o rozmiarach np. 4 kB (w procesorach Pentium i nowszych możliwe jest także używanie stron o rozmiarach 4
MB). Gdy program odwołuje się do pamięci, podaje adres właściwej komórki pamięci. Adres ten jest 32-bitową liczbą,
która składa się z trzech części:
- indeks w katalogu stron (liczba 10-bitowa),
- indeks w tablicy stron (liczba 10-bitowa),
- przesunięcie w obrębie strony (liczba 12-bitowa).
Katalog stron zawiera wskaźniki do tablic stron, tablice stron przechowują adresy fizyczne stron. (System operacyjny
może zarządzad wieloma katalogami i tablicami stron). Zatem pierwsza częśd adresu wybiera z katalogu stron tablicę
stron. Druga częśd adresu wybiera pozycję z tablicy stron, która wyznacza fizyczny adres konkretnej strony. Przesunięcie
jest adresem lokalnym w obrębie wybranej strony. Ostatecznie adres fizyczny, na który zmapowano adres logiczny,
wyznaczany jest z dwóch składników: adresu fizycznego strony i przesunięcia.
46. Co jest przyczyną a co celem wprowadzenia segmentacji pamięci w systemach mikroprocesorowych?
Celem segmentacji pamięci jest rozdzielenie obszarów pamięci przeznaczonych dla programu, danych i stosu. Pozwala to
na sprzętową ochronę pamięci przy pracy wielozadaniowej.
Cel: przyspieszenie pracy komputera dzięki operowaniu krótszymi adresami
Przyczyna: Możliwośd operowania przez procesor jedynie na 16 bitach danych jednocześnie
( 16 bit = 1 segment)
47. Co to jest tablica wektorów przerwao i do czego służy?
Elementy tej tablicy zawierają właściwe adresy początków programów obsługi przerwao. Tablica wektorów przerwao
jest strukturą umieszczoną w pamięci operacyjnej komputera. Każda pozycja tej tablicy związana jest z dokładnie jednym
przerwaniem i zawiera adres komórki pamięci, w której znajduje się początek (kod pierwszej instrukcji) programu
obsługującego to przerwanie. Po dokonaniu arbitrażu sterownik przerwao podaje na swoim wyjściu danych numer
przerwania, które ma byd obsłużone. Mikroprocesor pobiera ten numer i następnie przy jego pomocy odczytuje adres
pocztu programu obsługi przerwania, który ma zostad wykonany. Adres ten, po zapamiętaniu informacji niezbędnych do
powrotu do przerwanego programu głównego, jest ładowany do określonych rejestrów procesora, w tym licznika
rozkazów. Powoduje to wykonanie skoku do programu obsługi przerwania umieszczonego pod adresem odczytanym z
tablicy wektorów przerwao. Po zrealizowaniu wymiany następuje powrót z programu obsługi przerwania do programu
głównego, który jest kontynuowany. Procesor obsługuje polecenie przerwania przy użyciu tablicy wektorów przerwao,
która znajduje się w początkowych 1024 bajtach pamięci . Każdy element tablicy jest 32-bitowym adresem typu
segment-przesunięcie, który wskazuje procedurę systemu operacyjnego. Rzeczywiste adresy w tablicy zmieniają się w
zależności od komputera. PS. Tablica zajmuje 1024B=32b*256, (1B=8b), czyli standardowych przerwao jest tylko
256 Na szczęście każde przerwanie ma wiele funkcji.
Przykład:
INT 10h to instrukcja żądania usługi grafiki, tak więc odnaleziony w wektorze przerwao dla numeru 10h adres to
F000:F065 pod którym rozpoczyna się obsługa przerwania zakooczona instrukcją RETI, która powoduje powrót do
wykonania kolejnego polecenia w bieżąco wykonywanym programie.
48. Wymieo i opisz przeznaczenie rejestrów jednostki centralnej procesora z rodziny x86.
Jednostka Centralna
Jednostka Wykonawcza
Jednostka Interfejsowa
Rejest
ry o
gól
n
ego
p
rz
ez
n
acze
n
ia
Rejestr znaczników - Bezpośrednio do jednostki
arytmetyczno-logicznej dołączony jest 16-bitowy
rejestr znaczników (rejestr flag). Znajdujące się w nim
flagi zostały podzielone na dwie grupy, tj. kontrolną i
arytmetyczną. Flagi arytmetyczne dostarczają
dodatkowych informacji na temat wyniku ostatniej
operacji wykonanej przez jednostkę arytmetyczno-
logiczną. Flagi kontrolne wpływają na sposób pracy
mikroprocesora. Mniej znaczący bajt rejestru
znaczników odpowiada rejestrowi znaczników
mikroprocesora 8080/8085. Cztery najbardziej
znaczące bity pozostają nieużywane. Przykładowe
znaczniki to: SF (sign flag) - znacznik znaku, ZF (zero
flag) - znacznik zera, PF (parity flag) - znacznik
parzystości, AF (auxiliary carry flag) - znacznik
przeniesienia połówkowego (pomocniczego), CF
(carry flag) - znacznik przeniesienia, OF (overflow flag)
- znacznik nadmiaru, IF (interrupt flag) - znacznik
przerwao, DF (direction flag) – znacznik kierunku, TF
(trap flag) - znacznik pułapki umożliwiającej pracę
krokową.
Licz
n
ik r
o
zkazó
w
(In
struc
ti
o
n
P
o
in
ter
–
IP)
16-bitowy rejestr, którego zawartośd służy do
obliczania adresu fizycznego następnego
słowa rozkazu do pobrania z pamięci. Stanowi on
rejestr indeksowy dla rejestru CS
wyznaczającego segment z kodem programu.
Jego zawartośd jest automatycznie
inkrementowana
po pobraniu każdego bajtu rozkazu (w przypadku
pobrania słowa jego wartośd wzrasta o 2).
Programista ma możliwośd zmiany zawartości
licznika rozkazów poprzez zastosowanie rozkazu
skoku.

Reje
stry
wsk
aź
n
ik
o
w
e
i in
d
ek
so
we
Rejestry arytmetyczne
Są to cztery 16-bitowe rejestry ogólnego
przeznaczenia: AX, BX, CX, DX. Każdy z tych rejestrów
może również działad jako dwa niezależne rejestry 8-
bitowe:
• AX lub AH, AL
• BX lub BH, BL
• CX lub CH, CL
• DX lub DH, DL
AX – Akumulator (Accumulator)
bezpośrednio współpracuje z jednostką
arytmetyczno-logiczną, przechowuje wartości
obliczeniowe
BX – Baza (Base)
używany do adresowania argumentu, znajdującego
się w pamięci, stanowiąc bazę do obliczania adresu
CX – Licznik (Counter)
używany jako licznik w operacjach łaocuchowych oraz
pętlach
DX – Dane (Data)
jest wykorzystywany w niektórych operacjach
arytmetycznych do przechowywania
części argumentu lub wyniku operacji (mnożenie i
dzielenie 16- bitowe). Zawiera on także adres
urządzenia w operacjach wejścia/wyjścia.
Rejestry wskaźnikowe i indeksowe
Są to 16-bitowe rejestry adresowe: SP, BP, SI, DI. Ich
głównym zadaniem jest wskazywanie miejsca
w pamięci, w którym znajdują się argumenty rozkazu.
Wykorzystywane są w adresowaniu
indeksowym, bazowym oraz indeksowo-bazowym.
Można ich również używad do przechowywania
argumentu bądź wyniku operacji. Podobnie jak w
przypadku rejestrów arytmetycznych, rejestry
adresowe mają nazwy zależne od funkcji jaką pełnią:
SP – wskaźnik stosu (Stack Pointer)
BP – wskaźnik bazy (Base Pointer)
SI – rejestr indeksowy źródła (Source Index)
DI – rejestr indeksowy przeznaczenia (Destination
Index)
Reje
stry
s
egm
ent
o
we
Są to 16-bitowe rejestry, dostępne dla programisty,
których zawartośd służy do obliczania adresu
fizycznego komórki pamięci. Rejestry te zawierają
adres początkowy danego segmentu pamięci.
Mikroprocesor w zależności od rodzaju segmentu
pamięci, do którego chce się odwoład, wykorzystuje
odpowiedni z rejestrów. Programista ma możliwośd
zmiany automatycznie wykorzystywanego rejestru
poprzez umieszczenie odpowiedniego prefiksu przed
rozkazem, dla którego zmiana ma zostad zastosowana.
• CS – rejestr segmentowy programu (Code Segment
register) Zawartośd tego rejestru wyznacza początek
aktualnie używanego segmentu programu. Wartośd ta
wykorzystywana jest do obliczania adresu fizycznego
kolejnego rozkazu do pobrania z pamięci.
• DS – rejestr segmentowy danych (Data Segment
register) Zawartośd tego rejestru wyznacza początek
aktualnie używanego segmentu danych. Wartośd ta
wykorzystywana jest do obliczania adresu fizycznego
argumentu lub wyniku aktualnie wykonywanego
rozkazu. Wyjątek stanowią rozkazy łaocuchowe, w
których zawartośd tego rejestru służy jedynie do
obliczania adresu źródła danych.
• SS – rejestr segmentowy stosu (Stack Segment
register) Zawartośd tego rejestru wyznacza początek
aktualnie używanego segmentu stosu. Wartośd ta
wykorzystywana jest do obliczania adresu fizycznego
komórki pamięci, na którą wskazuje wskaźnik stosu
(rejestr SP).
• ES – rejestr segmentowy dodatkowy (Extra Segment
register) Zawartośd tego rejestru wyznacza początek
aktualnie używanego dodatkowego segmentu danych.
Wartośd ta wykorzystywana jest do obliczania adresu
fizycznego przeznaczenia dla operacji łaocuchowych
(np. rozkazu przenoszenia bloku danych).
Wyszukiwarka
Podobne podstrony:
Opracowanie pytań MC OMEN 2
Opracowanie wykladow MC OMEN
Opracowanie pytań MC OMEN 3
Opracowanie projektu MC OMEN
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN 2
Opracowanie wykladow MC OMEN
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN
Opracowanie wykładów biofyzka 1 MC OMEN
Opracowanie pytań MC KULA MC OMEN 2
Opracowanie pytań RÓŻNE MC OMEN
więcej podobnych podstron