
Odpowiedzi na magiczne pytania
by n224 i zmaslem
aka
MC_OMEN FEAT MC_KULA
12 grudnia 2011
1
1
Automatyka
1.1
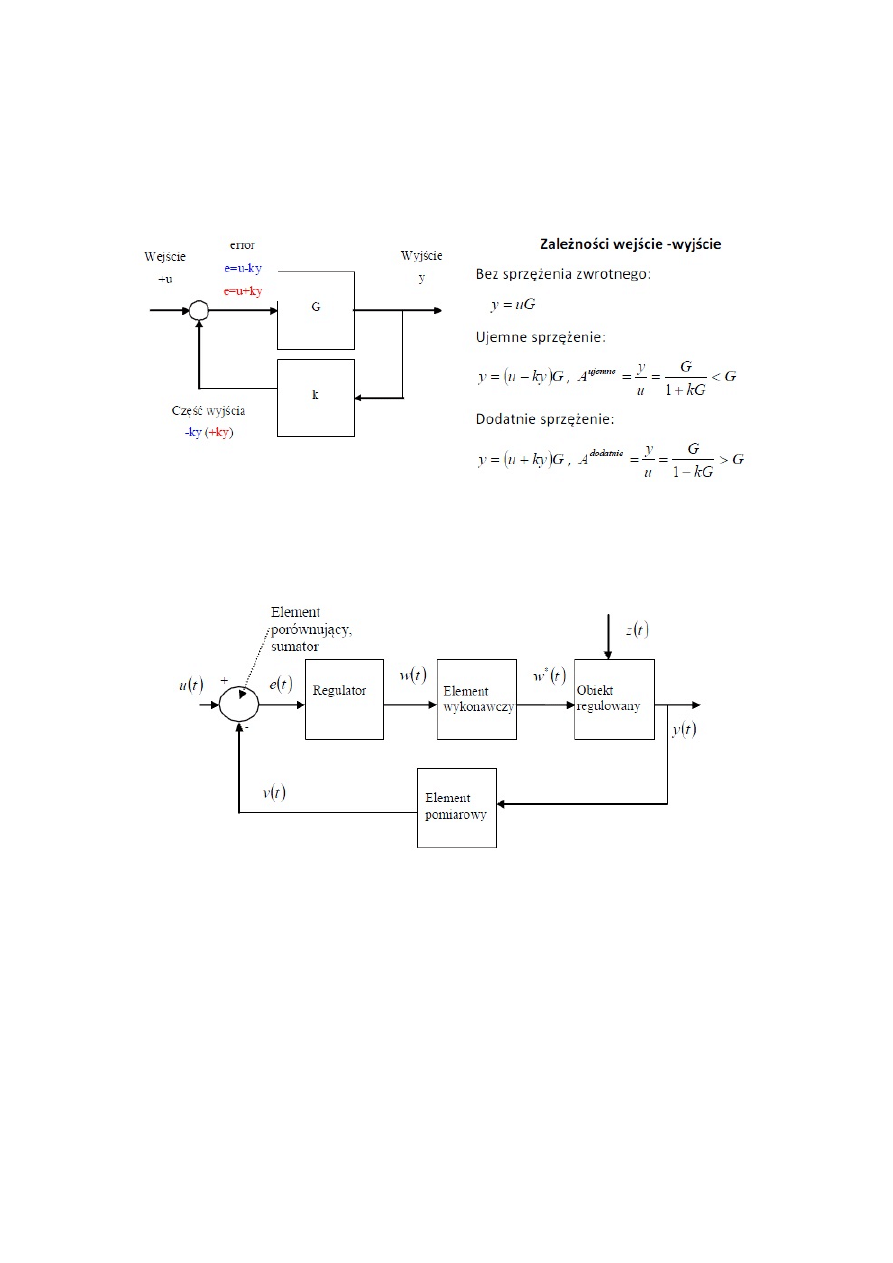
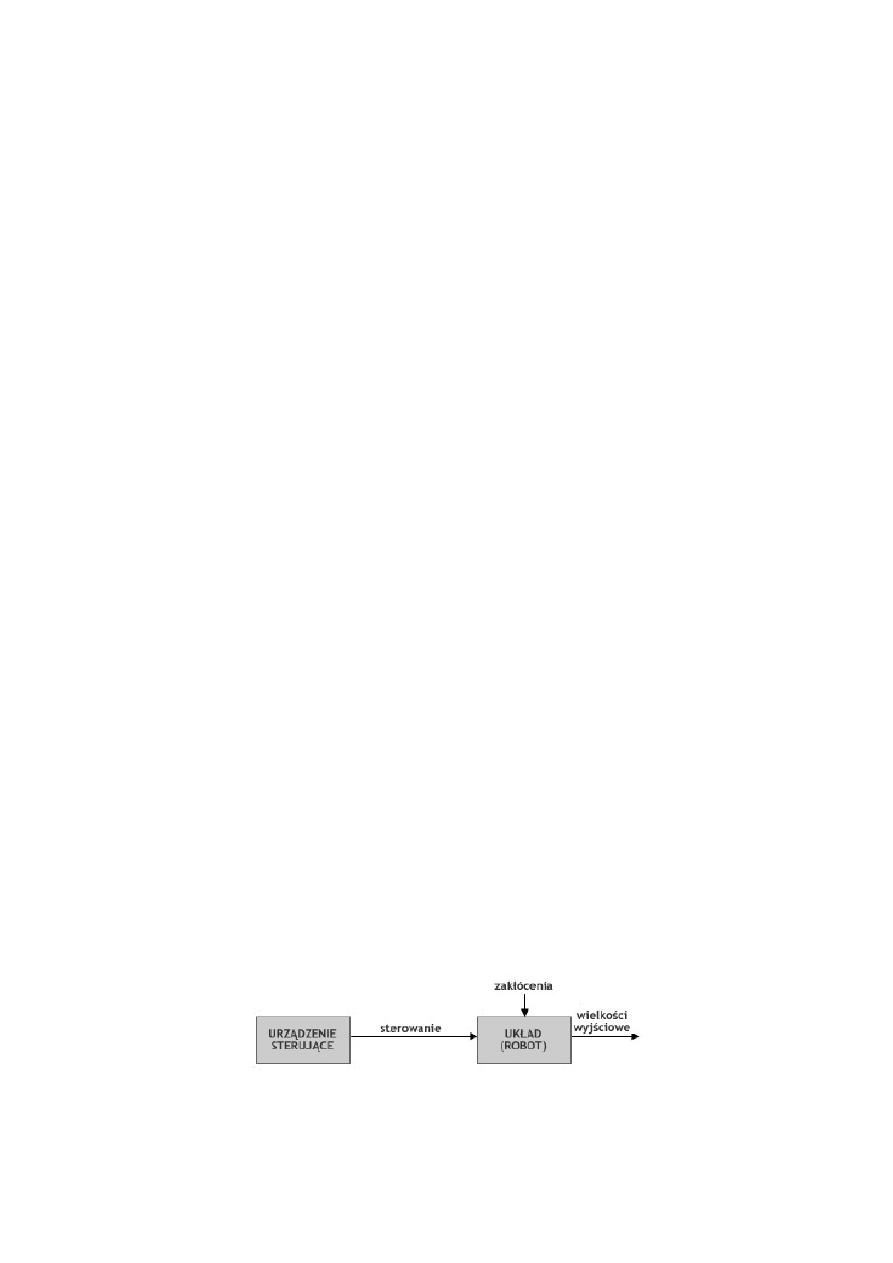
Schemat blokowy ukladu pracujacego w petli sprzezenia zwrotnego. Zaleznosci wejscie -
wyjscie.
1.2
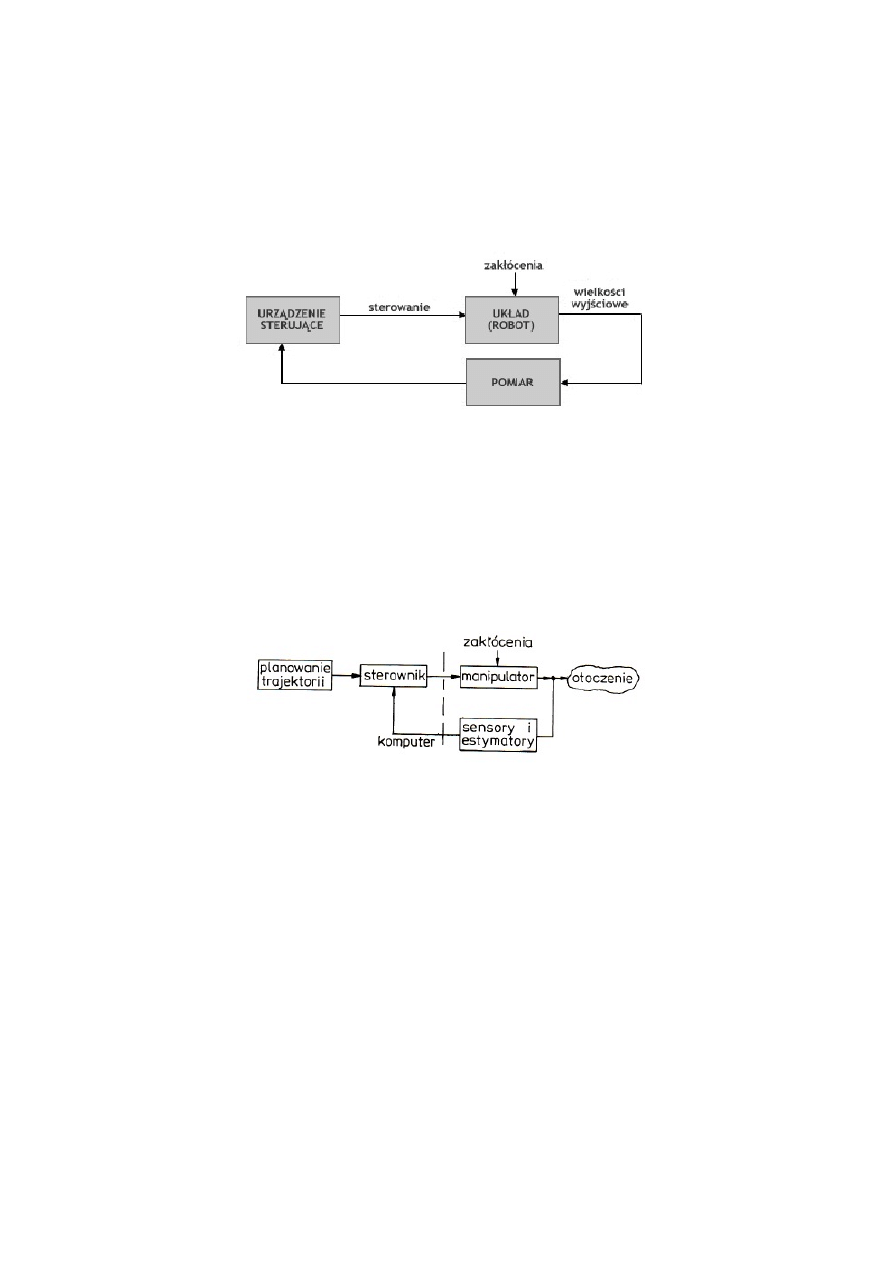
Klasyczny uklad regulacji - schemat, zasada dzialania
Układ regulacji składa się z :
1. Sumator - element porównujący
2. Regulator
3. Element wykonawczy
4. Obiekt regulowany
5. Element pomiarowy
Sumator wyznacza różnicę między sygnałem wejściowym i wyjściowym, różnica ta nazywana jest uchybem. W
stanie nieustalonym wartość uchybu powinna być jak najmniejsza, zaś w ustalonym równa 0. Sygnał przechodzi
jak na rysunku, gdzie przy obiekcie regulowanym brane są pod uwagę zakłócenia.
2

1.3
Układy liniowe. Definicje.
Układ jest liniowy kiedy spełniona jest superpozycja względem pobudzenia oraz względem parametrów, tzn:
y(p, λu
1
+ µu
2
, t) = λy(p, u
1
, t) + µy(p, u
2
, t)
(1)
y(λp
1
+ µp
2
, u, t) = λy(p
1
, u, t) + µy(p
2
, u, t)
(2)
1.4
Układy nieliniowe. Definicje.
Układ jest nieliniowy gdy nie jest spełniona zasada superpozycji względem pobudzenia i/lub parametru, tj :
y(p, λu
1
+ µu
2
, t) 6= λy(p, u
1
, t) + µy(p, u
2
, t)
(3)
y(λp
1
+ µp
2
, u, t) 6= λy(p
1
, u, t) + µy(p
2
, u, t)
(4)
Układy fizyczne są w istotcie układami nieliniowymi. Jednakże często zakłada się liniowość układu lub
linearyzuje się jego nieliniową charakterystykę w otoczeniu pewnego punktu pracy.
1.5
Właściwości systemów żywych (biomedycznych)
Systemy żywe są :
• Otwarte - istnieje wymiana materii i energii z otoczeniem
• Samosterowalne - ma miejsce ciągła wymiana informacji z otoczeniem, wewnętrzne przetwarzanie i wy-
korzystanie tej informacji.
• Samoregenerujące - są zdolne do długotrwałego zachowania struktury i funkcji. Cechę tą ma zarówno
cały ustrój, jak i komórka, jednakże nie ma np. narząd oczekujący na przeszczep.
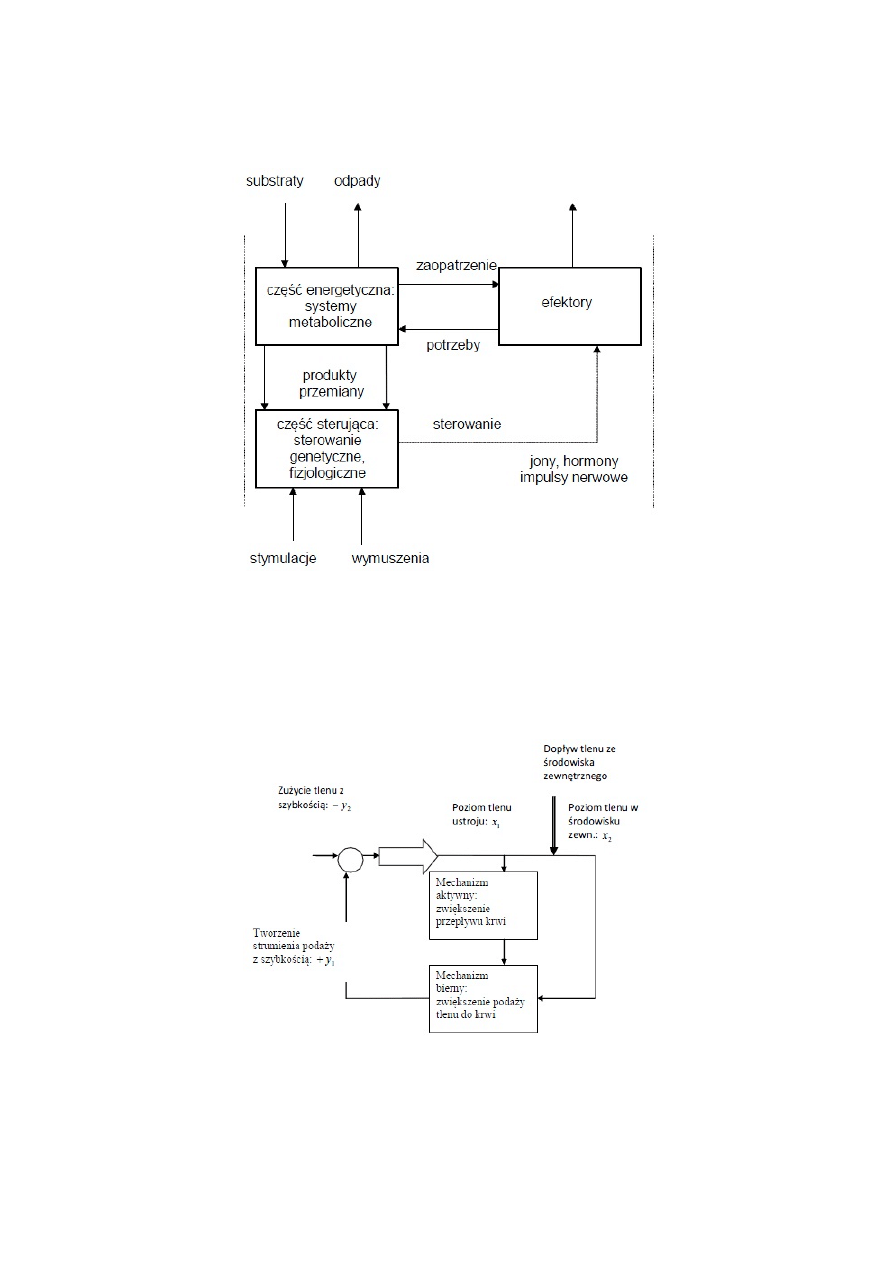
Wyroznia sie dwa podstawowe aspekty funkcjonowania systemow zywych: pierwszy zwiazany jest z pobiera-
niem, gromadzeniem, przekazywaniem i wykorzystaniem energii, drugi dotyczy przechowywania, przetwarza-
nia i wykorzystania informacji. Ten drugi aspekt sluzy zachowaniu stabilnosci procesow energetycznych. Wy-
roznienie dwoch wspolpracujacych podsystemow, energetycznej i informatycznej, jest podstawa systemowego
podejscia do analizy systemow zywych. Struktura organizmu jest utrzymywana za pomoca sterowania genetycz-
nego. Procesy w czesci genetycznej przebiegaja wolno. Sterowanie fizjologiczne zapewnia wlasciwe funkcjono-
wanie efektorow i podsystemow zuzywajacych energie i materie. Zuzycie musi zyc skompensowane zwiekszona
synteza w systemie metabolicznym. Procesy w tej czesci przebiegaja szybciej. Sterowanie genetyczne definiuje
strukture systemu, a procesy fizjologiczne wyznaczaja jego funkcje: "To, co nazywamy struktura, podlega bar-
dzo powolnym zmianom. To, co nazywamy funkcja, jest procesem podlegajacym szybkim zmianom ". Istnieja
dwa glowne cele regulacji w systemach zywych:
• Podtrzymanie homeostazy
• Podttrzymanie właściwego dpoływu z zewnątrz drogą regulacji strumieni materii i energii
Systemy żywe to zawsze systemy otwarte, oraz posiadają wbudowane bierne i czynne mechanizmy stero-
wania.
3
1.6
Przedstaw schematycznie strukture systemu zywego z wyróznieniem czesci energetyczna i
informatyczna
1.7
Epimorfizm biologiczny. Przykład
Epimorfizmem nazywamu zasadę, gdzie jednemu mechanizmowi regulacji automatycznej w organizmach niż-
szego rzędu odpowiada kilka mechanizmów regulacjii w organizmach złożonych. W prostych organizmacm
zazwyczaj regulacja jest bierna, a w złożonych na te pierwotne mechanizmy biernej regulacji nakłaadają się
dodatkowe mechanizmy regulacji, także aktywne. Przykład:
1.8
Porównanie właściwości systemów inżynierskich i systemów biomedycznych
• W podejściu inżynierskim sstem jest projektowany i optymalizowany, tak, aby spełniał precyzyjnie okre-
ślone zadanie. Systemy fizjologiczne są uniwersalne, np układ krwionośny zaopatruje ustrój w tlen, oraz
uczestyniczy w wymianie ciepła.
4

• System inżynierski, jako zaprojektowany, ma znana strukturę.
• Strutkura sstemu fizjologicznego jest nieznania i musi być wcześniej zidentyfikowana zanim będzie moż-
liwa analiza właściwości systemu i sterowanie jego zachowaniem.
• W systemach fizjologicznych występują znaczne sprzężenia skrośne: np. funkcjownowanie systemu sercowo-
naczyniowego jest bardzo silnie zależne międzyinnymi od stanu nerek, układu oddechowego i endokry-
nologii. To bardzo komplikuje znalizę i sterowanie.
• Systemy fizjologiczne w ogólności są adaptacyjne. Oznacza to, że system dopasowuje się do zmian wa-
runków i to nie tylko na drodze ewentualnego sprzężenia zwrotnego, ale także na drodze zmiany wartości
parametrów fizjlolgoicznych.
• Systemy fizjlologiczne z natury są nieliniowe(choć częsta są linearyzowane), podczas gdy inżynierskie
mogą być liniowe lub nieliniowe.
1.9
Wymien i omów rodzaje modeli systemów biomedycznych fizjologicznych
Rodzaje modeli:
• Model konceptualny - ma postać schematu blokowego. Opisuje on procesy w sposób jakościowy.
• Model matematyczny - służy bardziej zaawansownej analizie, w tym przypadku proponuje się sposób
funkcjonowania bloków schematu, matematyczny opis ich działania.
• Model black-box - modeel którego struktura wewnętrzna nie jest znana, jednakże zależności wejście -
wyjście jest badane na drodze eksperymentalnej. Inaczej zwany empirycznym lub nieparametrycznym.
• Model strukturalny - Posiada wewnetrzną strukturę i zbiór parametrów. Inaczej znany jako model gray-
box lub parametryczny.
Rodzaje modelowania :
• Modelowanie teoretyczne
• Modelowanie empiryczne
• Z wykorzystaniem funkcji sklejanych
• Samomodelowanie (ang.: self-modeling)
• Wykorzystujace funkcje przenoszenia
• Wykorzystujace calke splotowa
• Metoda skonczonych poziomow (elementow), inne
1.10
Transmitancja operatorowa
Transmitancją operatorową G(s) nazywamy stosunek transformaty Laplace’a sygnału wejściowego Y (s) =
L[y(t)]
do transformaty sygnału wejściowego układu U(s) = L[u(t)], przy zerowych warunkach początkowych.
G(s) =
Y (s)
X(s)
(5)
Transmitancja okresla ogolne wlasciwosci stacjonarnego ukladu liniowego o jednym wejsciu i jednym wyj-
sciu, niezalezne od rodzaju wymuszenia. Dla ukladu wielowymiarowego o n wejsciach i m wyjsciach mozna
okreslic m x n transmitancji wiazacych kazde wyjscie z kazdym wejsciem przedstawianych w postaci macierzy
transmitancji operatorowych.
5

1.11
Podaj definicje i właściwości jedynki Heaviside’a oraz delty Diraca
1.11.1
Jedynka Heaviside’a
Funkcja skokowa Heaviside’a (skok jednostkowy) jest funkcją nieciągłą która przyjmuje wartość 0 dla ujemnych
argumentów i wartość 1 w pozostałych przypadkach:
1(t) =
(
0
dla t < 0
1
dla t ≥ 0
1.11.2
Delta Diraca
Delta Diraca (albo funkcja impulsowa) ? to, mówiąc intuicyjnie, obiekt matematyczny o następujących własno-
ściach:
δ(t) =
(
+∞
dla t = 0
0
dla t 6= 0
Właściwości delty diraca:
L[δ(t)] = 1
(6)
Z
+∞
−∞
δ(t)dt = 1
(7)
Z
+∞
−∞
f (t)δ(t) = f (0)
(8)
1.12
Człony układów automatyki. Stosowany opis w dziedzinie czasu.
Czlony dynamiczne opisujemy w dziedzinie czasu na pomoca odpowiedzi impulsowej oraz odpowiedzi skoko-
wej. Odpowiedż impulsowa jest to odpowiedź układu na pobudzenie delta Diraca δ(t) przy zerwoych warunkach
początkowych. Odpowiedź impulsowa układu zdefiniowana jest następująco:
y(t) = h(t)|
u(t)=δ(t)
(9)
Odpowiedź skokowa to odpowiedź układu na pobudzenie jedynką Heaviside’a 1(t), tj:
y(t)|
u(t)=1(t)
= g(t)
Z
∞
0
h(τ )dτ
(10)
1.13
Człony układów automatyki. Stosowane opis w dziedzinie częstotliwości
Czlony dynamiczne w dziedzinie czestotliwosci obrazuje sie za pomoca charakterystyk czestotliwosciowych.
Charakterystki częstotliwościowe:
G(s)|
s=jω
=
(
X(ω) + jY (ω)
M (ω) ∗ e
jϕ(ω)
Gdzie :
• X(ω) - część rzeczywista
• Y (ω) - część urojona
• M(ω) - charkaterystyka amplitudowa (moduł)
• ϕ(ω) - charkaterystyka fazowa (faza)
6
Własności charakterystyk :
M (ω) =
p
X
2
(ω) + Y
2
(ω)
ϕ(ω) = arctan
Y (ω)
X(ω)
X(ω) = M (ω) cos ϕ(ω)
Y (ω) = M (ω) sin ϕ(ω)
X(ω) = Re[G(s)|
s=jω
]
Y (ω) = Im[G(s)|
s=jω
]
Charakterystki częstotliwościowe są często przedstawiane w formie graicznej. Charakterystyka amplitudowa
M (ω)
przestawiana jest w układzie prostokątnym, gdzie na osiach znajduje sie M w skali logarytmicznej oraz
ω
wyrażone w dB. Charakterystka fazowa ϕ(ω) podobnie, przestawiana jest w układzie z logarytmicznąskalą
ω
oraz z ϕ wyrażonem w stoponiach. Charakterystyki M(ω) oraz ϕ(ω) to charakterystki Bodego,tj :
• M(ω) - amplitudowa charkaterystyka Bodego
• ϕ(ω) - fazowa charkaterystyka Bodego
1.14
Czlon proporcjonalny. Odpowiedzi impulsowa i skokowa
Człon proporcjonlany, to taki, dla którego, charakterystki w dziedzienie czasu są następujące:
1.14.1
Odpowiedź impulsowa
h(t) = k ∗ δ(t)
(11)
H(s) = k
(12)
1.14.2
Odpowiedź skokowa
g(t) = k ∗ 1(t)
(13)
G(s) =
k
s
(14)
1.14.3
Charakterystki w dziedzinie częstotliwości
M (ω) = k
(15)
ϕ(ω) =
(
0
gdy k ≥ 0
−π
gdy k < 0
X(ω) = k
(16)
Y (ω) = 0
(17)
7
1.15
Człon całkujący idealny. Odpowiedzi impulsowa i skokowa
Człon całkujący (idealny) daje na swoim wyjściu sygnał y(t ) proporcjonalny do całki sygnału wejściowegou(t
):
y(t) = k ∗
Z
t
0
u(τ )dτ
(18)
Gdzie k to współczynnik proporcjonalności, wartość stała. Poprzez przeprowadzenie obustronnej transformacji
Laplace’a powyższego wyrażenia daje następujące zależności:
Y (s) =
k
s
U (s)
(19)
G(s) =
Y (s)
U (s)
=
k
s
(20)
Y (s) =
k
s
gdy U(s) = 1, u(t = δ(t))
(21)
Y (s) =
k
s
2
gdy U(s) =
1
s
, u(t) = 1(t)
(22)
1.15.1
Odpowiedź impulsowa
y(t)|
u(t)=kδ(t)
= L
−1
[
k
s
∗ 1] = k1(t)
(23)
1.15.2
Odpowiedź skokowa
y(t)|
u(t)=k1(t)
= L
−1
[
k
s
1
s
] = kt1(t)
(24)
1.15.3
Charakterystyki w dziedzinie częstotliwości
M (ω) =
k
ω
(25)
ϕ(ω) = −
π
2
(26)
oraz
X(ω) = 0, Y (ω) = −
k
ω
(27)
1.16
Człon całkujący rzeczywisty. Odpowiedź impulsowa i skokowa
Człon całkujący rzeczywisty posiada transmitancję operatorową w następującej postaci:
Y (s) =
k
s(1 + sT )
U (s)
(28)
G(s) =
Y (s)
X(s)
=
k
s(1 + sT )
(29)
Y (s) =
k
s(1 + sT )
gdy U(s) = 1, u(t) = δ(t)
(30)
Y (s) =
k
s
2
(1 + sT )
gdy U(s) =
1
s
, u(t) = 1(t)
(31)
8
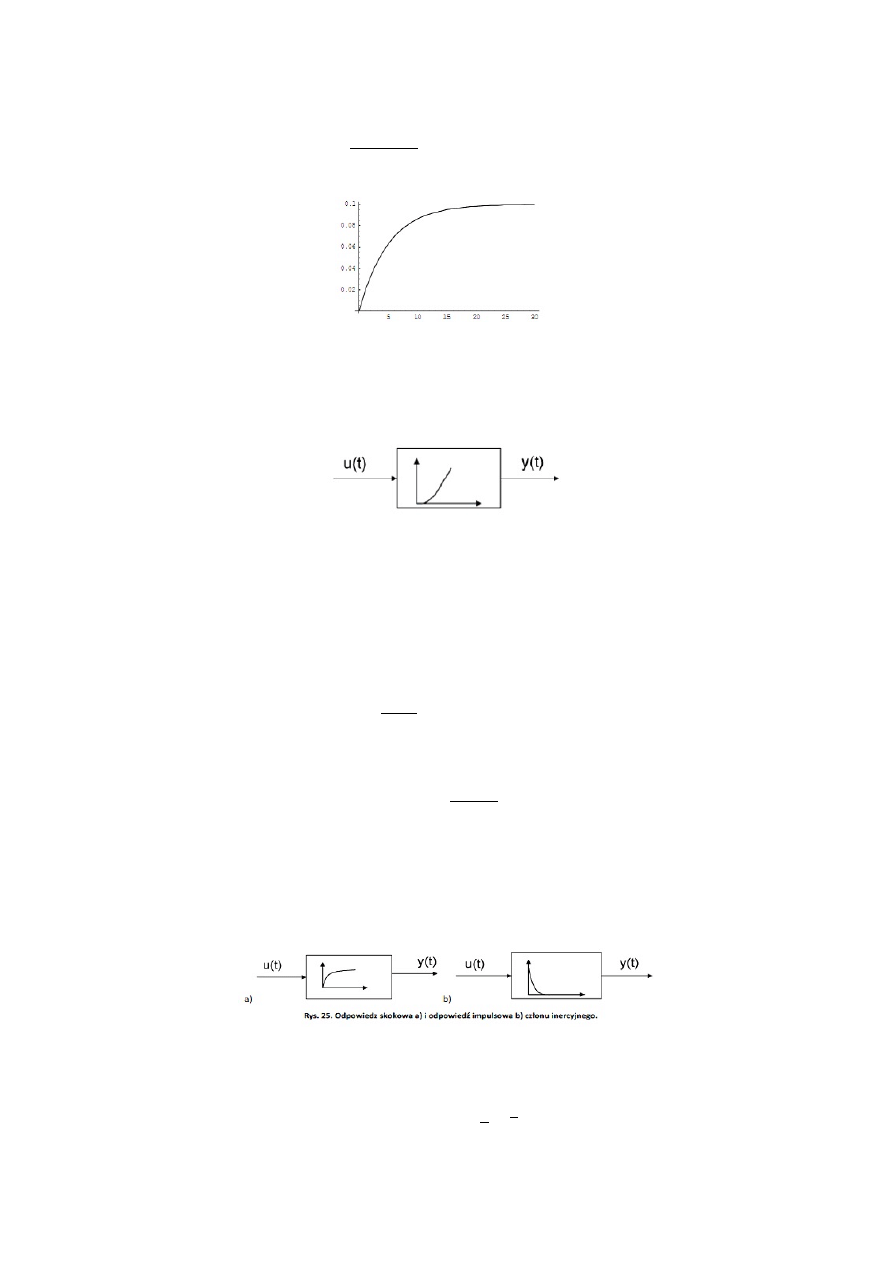
1.16.1
Odpowiedź impulsowa
Y (s) =
k
s(1 + sT )
gdy U(s) = 1, u(t) = δ(t)
(32)
1.16.2
Odpowiedż skokowa
Ogólna postać charakterystki skokowej:
Dla pobudzenia skokowego:
y(t) = k(t − T + e
−t/T
T )
(33)
1.17
Człon inercyjny pierwszego rzędu. Odpowiedzi impulsowa i skokowa
Równanie różniczkowe członu inercyjnego pierwsze rzędu ma postać:
T ∗
dy(t)
dt
+ y(t) = k ∗ u(t)
(34)
Po przeprowadzeniu obustronnej transformacji Laplace’a tego wyrażenia otrzymuejmy transmitacje operato-
rową w postaci:
G(s) =
k
1 + sT
(35)
Gdzie:
• k - stały współczynnik wzmocnienia
• T - stała czasowa
1.17.1
Odpowiedź impulsowa
y(t)|
u(t)=δ(t)
=
k
t
e
−
t
T
(36)
9
1.17.2
Odpowiedź skokowa
y(t)|
u(t)=1(t)
= k(1 − e
−
t
T
)
(37)
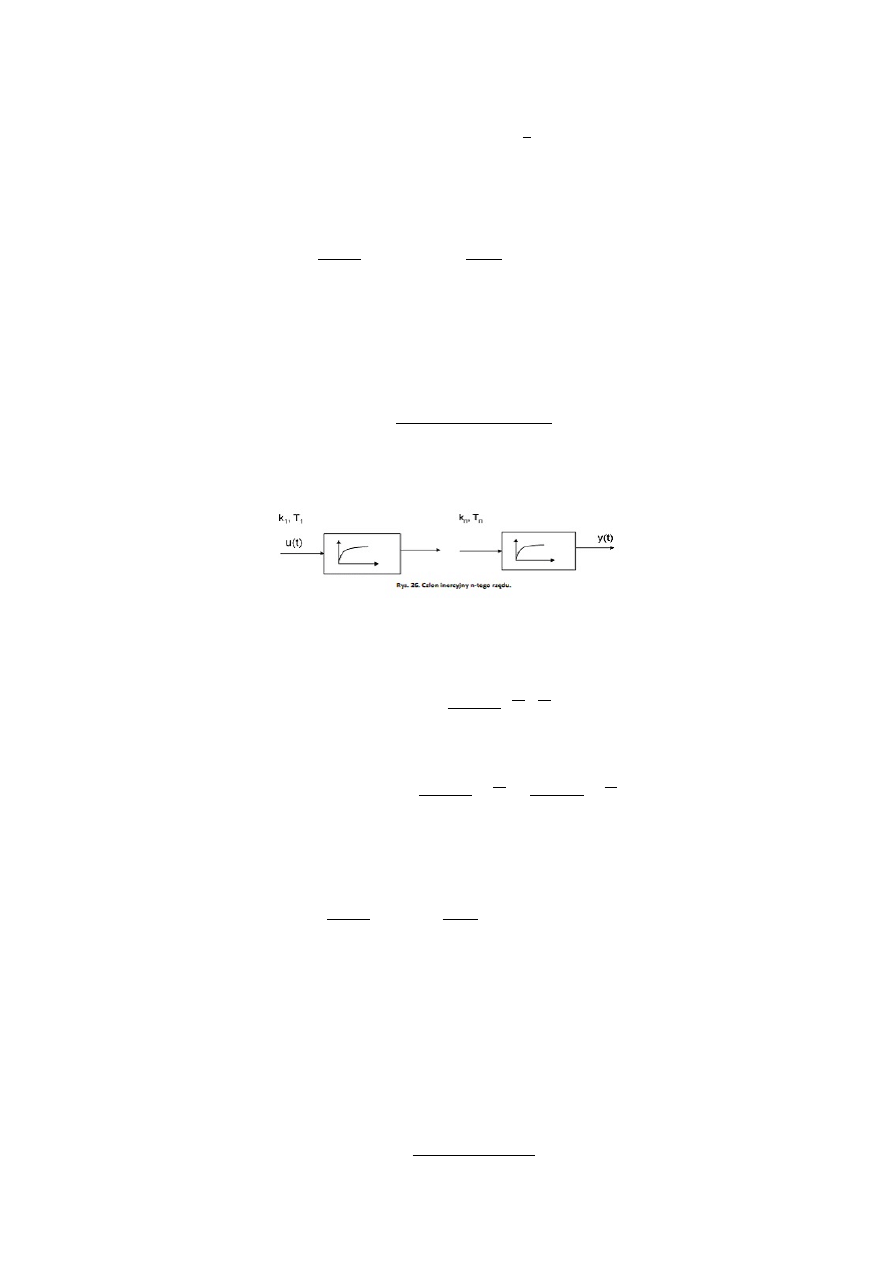
1.18
Człon inercyjny drugiego rzędu. Odpowiedź impulsowa i skokowa
Równanie różniczkowe członu inercyjnego drugiego rzędu ma postać:
T
1
T
2
∗
d
2
y(t)
dt
2
+ (T
1
+ T
2
) ∗
dy(t)
dt
+ y(t) = k ∗ u(t)
(38)
Gdzie:
• k - wzmocznienie układu
• T
1
i T
2
- stałe czasowe układu
Transmitancja operatorowa członu ma postać :
G(s) =
k
T
1
T
2
+ (T
1
+ T
2
)s + 1
(39)
W ogólności możemy mówić o członach inercyjnych n-tego rzędu. Odpowiada to sytuacji, gdy człony inercyjne
pierwszego rzędu połączone są szeregowo tj:
1.18.1
Odpowiedź impulsowa
y(t)|
u(t)=δ(t)
=
k
T
1
− T
2
e
t
T1
−
t
T2
(40)
1.18.2
Odpowiedź skokowa
y(t)|
u(t)=1(t)
= k(1 −
T
1
T
1
− T
2
e
−
t
T2
+
T
2
T
1
− T
2
e
−
t
T2
)
(41)
1.19
Człon oscylacyjny. Odpowiedź skokowa
Równanie różniczkowe człlonu oscylacyjnego ma postać:
T
2
0
∗
d
2
y(t)
dt
2
+ 2T
0
ζ ∗
dy(t)
dt
+ y(t) = k ∗ u(t)
(42)
Gdzie:
• T
0
- okres drań nie tłumionych
• ζ - współczynnik tłumienia
• k- wzmocnienie równe stosunkkow ustalonej wartości sygnału wyjściowego do ustalonej wartości sygnału
wejściowego.
Tansmitancja operatorowa tego członu, wyznaczona z wykorzystaniem obustronnej transformaty Laplace’a
powyższego równania , jest następująca:
G(s) =
k
T
2
0
s
2
+ 2ζT
0
s + 1
(43)
10
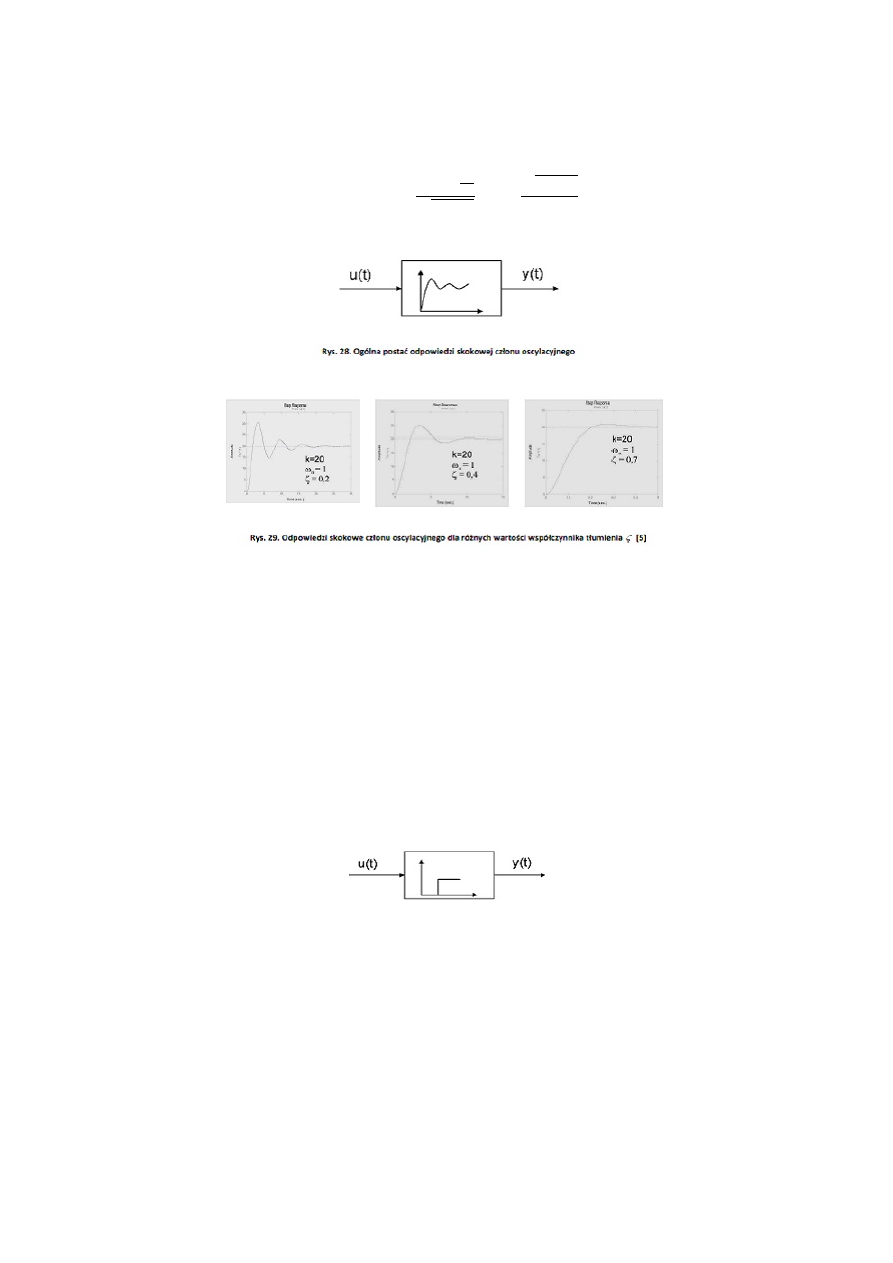
1.19.1
Odpowiedź skokowa
Odpowiedź skokowa ma charaktery oscylacyjyny, gdy 0 < ζ < 1. Ogólna postać odpowiedzi skokowej jest
następująca:
y(t)|
u(t)=1(t)
= k(1 −
exp[−
ζ
T
0
√
1 − s
2
∗ sin(
√
1 − s
2
T
0
t + ψ))
(44)
1.20
Człon opóźniający. Odpowiedź skokowa
Transmitancja operatorowa członu opóźniającego jest następująca:
G(s) = ke
−sT
0
(45)
1.20.1
Odpowiedź skokowa
Odpowiedź skokowa ma postać:
y(t) = ku(t − T
0
)
(46)
1.21
Simulink. Numeryczne wyznaczanie odpowiedzi modelu na zadane pobudzenie.
1.22
Praca z programem Simulink (model, funkcja przenoszenia, pobudzenie, symulacje, ob-
serwacje)
. Simulink odpala się z poziomu linii komend matlaba wpisując komendę śimulink". Funkcją przenoszenia nazy-
wamy transmitancję operatorową, tj stosunek transformaty Laplace’a wyjścia do transformaty wejścia. Blok ten
jest opisany w programie jako "transfer function", parametry są macierzami licznika i mianownika transofrmaty,
tj wypisujemy tylko współczynniki od s
n
do s
0
- który jest wyrazem wolnym. Pobudzenie ustawiamy z funkcji
generatora, często używa się prostego pobudzenia śtep". Obserwacje możemy dowolnie przeglądać na oscy-
loskopach i innych manualnie zdefiniowanych urządzeniach pomiarowych, które mogą monitorować dowolną
zmienną występującą w funkcji.
11
1.23
W jaki sposób wartosci parametrów systemów biomedycznych (fizjologicznych) utrzymy-
wane sa przy zmieniajacych sie znacznie parametrach otoczenia
• Istnieja pewne poziomy odniesienia sluzace do porównania. W wyniku porównania powstaje sygnal ró-
znicowy wykorzystywany do regulacji. W systemach biomedycznych trudno wskazac takie mechanizmy
dzialania. Nie udalo sie takze znalezc odpowiednika komparatora, czyli czlonu porównujacego poziom
zadany z poziomem aktualnym.
• Istnieja wbudowane wlasciwosci petli sprzezenia zwrotnego. Takie mechanizmy udalo sie zidentyfikowac
w systemach biomedycznych. Mechanizm ten umozliwia utrzymanie okreslonego punktu pracy, czyli
tzw. homeostazy (zdolnosc do utrzymania stanu równowagi dynamicznej srodowiska, w którym zachodza
procesy biologiczne).
1.24
Regulacja z otwartą pętlą sprzężenia zwrotnego
• sygnał na wejściu układu - u(t)
• sygnał na wyjściu układu - y(t) = G
1
G
2
u(t)
• wzmocnienie układu - G
0
=
y(t)
u(t)
= G
1
G
2
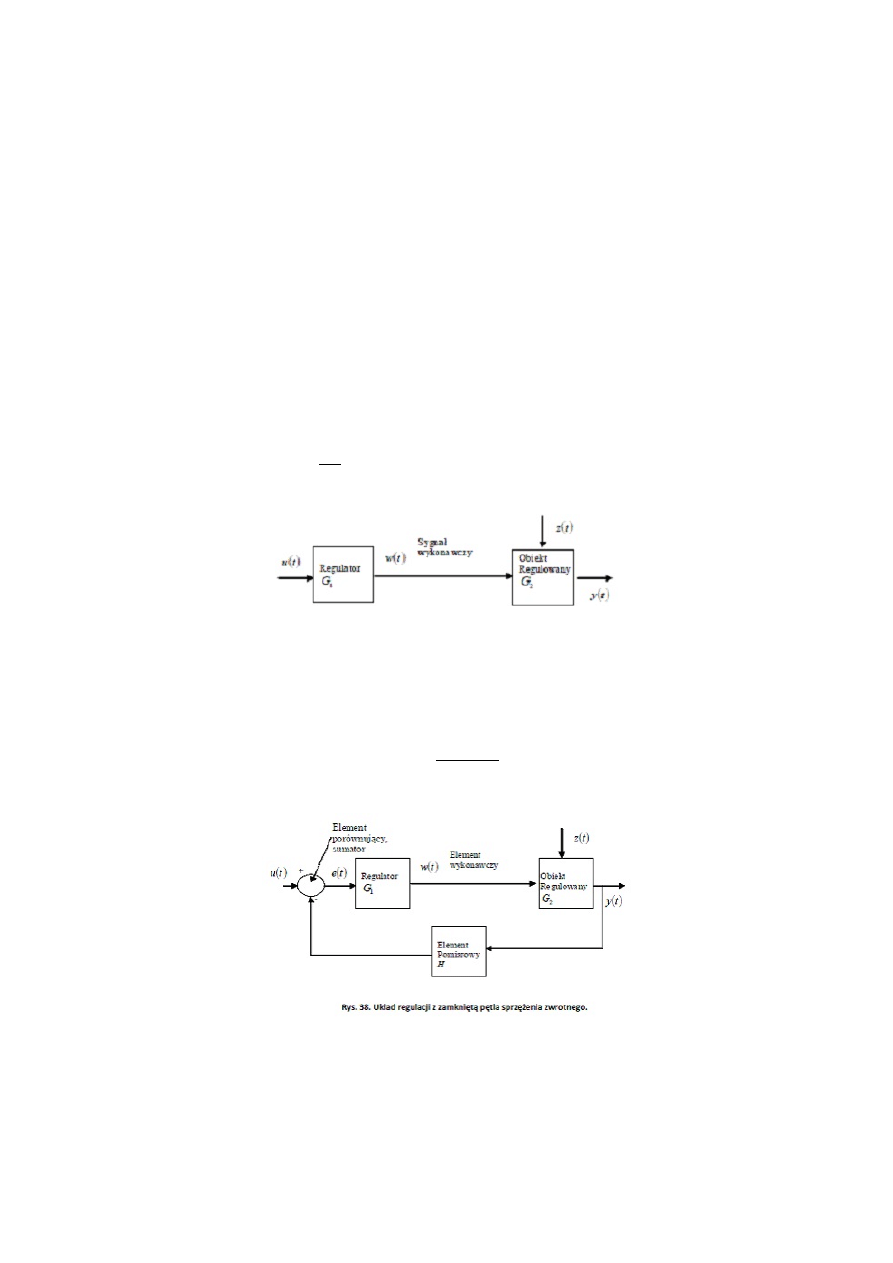
1.25
Regulacja z zamkniętąpętlą sprzężenia zwrotnego
Dla układu z zamkniętąpętląsprzężenia zwrotnego , po odpowiednich obliczeniach otrzymujemy następującą-
postaćwyrażenia na wzmocnienie G
z
z zamkniętą pętlą:
G
z
=
G
0
1 + G
0
H
(47)
Zauważmy, że zawsze zachodzi G
z
< G
0
Redukcja wzmocnienia przy zakniętej pętli sprzężenia w stosunku
do wzmocnienia z pętląotwartąmusi prowadzić do reukcji wpływu zakłóceńna system.
12
1.26
Ujemne sprzężenie zwrotne w biomedycznych systemach regulacji. Regulacja stężenia
glukozy, wymień główne składowe biorące udział w procesie regulacji.
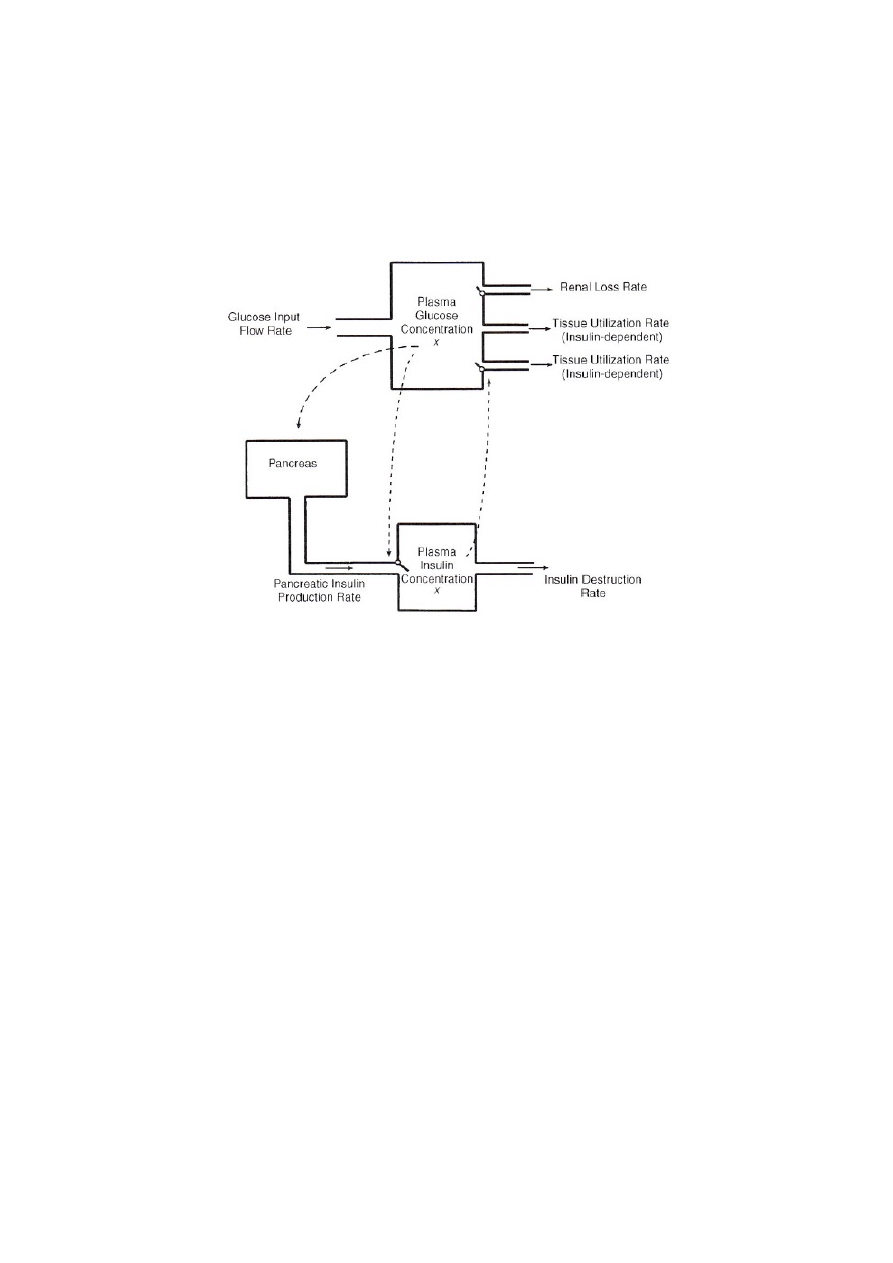
Stezenie glukozy jest w stanie ustalonym stale. Aby pozostalo stalo przy dostarczaniu glukozy do organizmu z
pozywieniem, doplyw glukozy musi byc zrównowazony jej odplywem (zuzyciem). Mechanizm regulacji przed-
stawia rusunek:
Glukoza dostarczana jest z pozywieniem. Jej eliminacja moze zachodzic na trzy sposoby: zuzycie w tkan-
kach oraz wydalanie przez nerki (tylko w cukrzycy). Wzrost stezenia glukozy we krwi powoduje zwiekszone
wydalanie (po wyczerpaniu zapasów takze wydzielanie) insuliny do krwi. Wzrost stezenia insuliny we krwi
poteguje mechanizm zuzycia glukozy. Poziom stezenia glukozy we krwi maleje, powraca do stanu ustalonego.
1.27
Ujemne sprzezenie zwrotne w biomedycznych systemach regulacji. Odruch kolanowy, wy-
mien glówne skladowe odpowiedzialne za ten odruch.
Odruch kolanowy jest przykladem odruchu neuro-miesniowego (tzw. odruch rzepkowy). Jest on odruchem bez-
warunkowym, reakcja na uderzenie mloteczkiem w sciegno rzepki. To powoduje napiecie miesnia czworoglo-
wego uda i wyprostowanie podudzia w stawie kolanowym. Impulsy nerwowe, które zamieniaja w kod informa-
cje o wielkosci napiecia miesni, sa przesylne do rdzenia kregowego. To z kolei powoduje wysylanie ipulsów z
powrotem do tego samego miesnia prostownika i powrót nogi od poczatku polozenia w zgieciu. Osrodki odpo-
wiedzialne za mechanizm odruchu kolanowego:
13
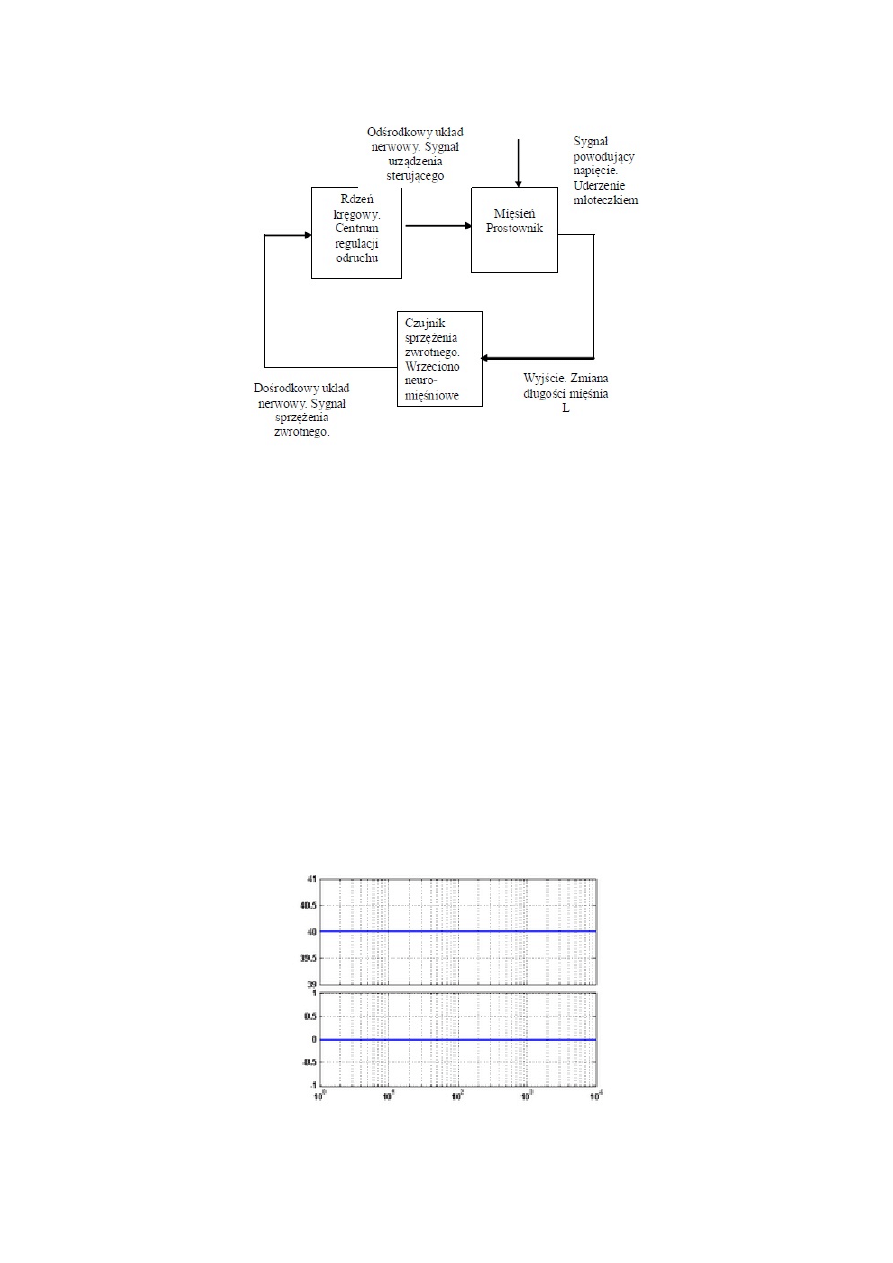
Powyższy odruch jest przykładem ujemnego sprzężenia zwrotnego występującego w biomedycznych sys-
temach regulacji. Początkowe zaburzenie w układzie tj. uderzenie młoteczka w kolano jest zakłóceniem pracy
systemu – jest stanem odbiegającym od normy. To powoduje uruchomienie działania układu mającego na celu
przeciwdziałanie skutkom zakłócenia (tj. uderzenia i skurczu mięśni) i powrót do stanu równowagi.
1.28
Analiza czestotliwosciowa liniowych systemów regulacji. Charakterystyki Bode’ego. Na-
szkicuj charakterystyki Bode’ego dla czlonów: proporcjonalnego, calkujacego i róznicz-
kujacego.
Charakterystyka Bode’ego to logarytmiczna zaleznosc amplitudy i fazy transmitancji operatorowej. Sklada sie
ona z charakterystyki amplitudowej oraz fazowej. Dolna charakterystyka jest fazowa, a górna amplitudowa.
1.28.1
Człon proporcjonalny
H(s) = k
(48)
dla k = 100
14
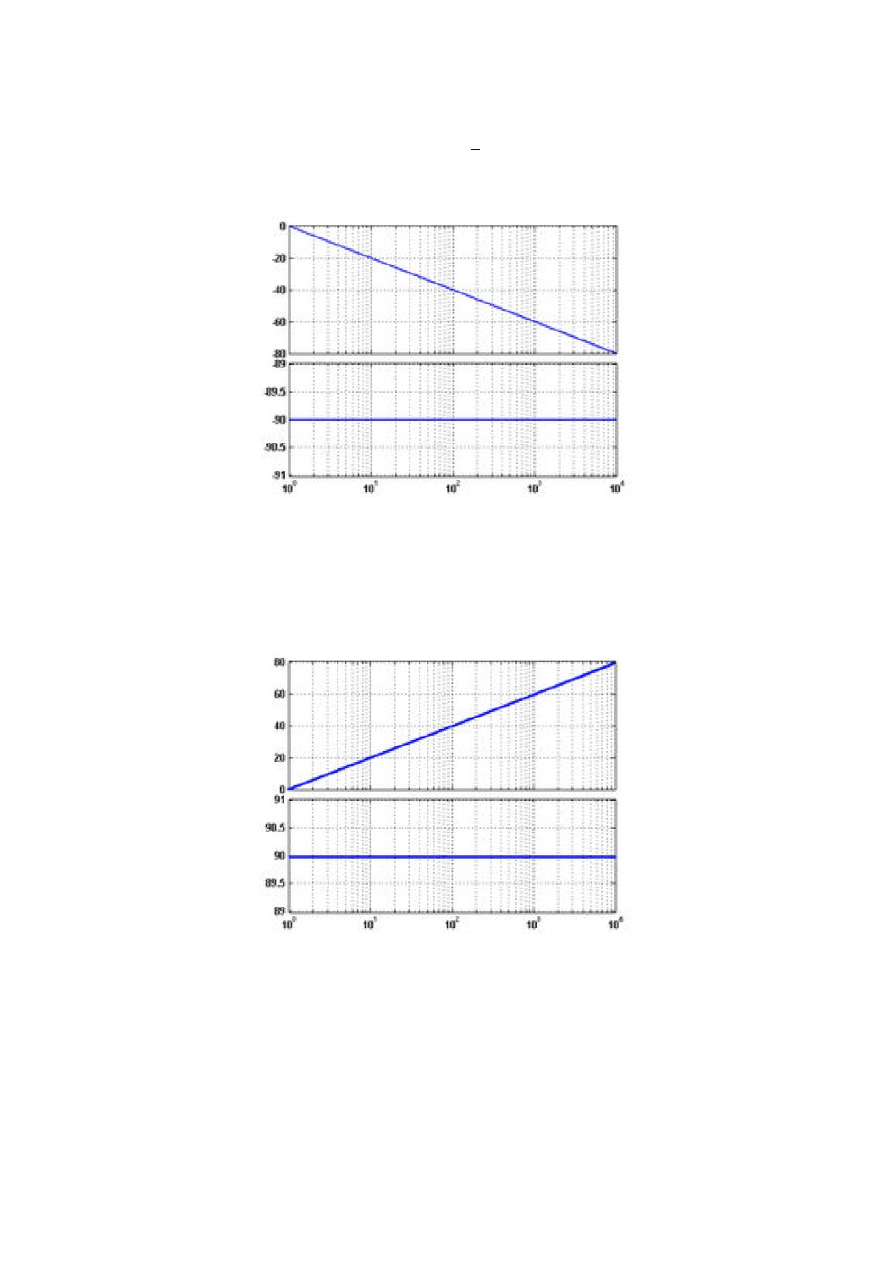
1.28.2
Człon całkujący
H(s) =
k
s
(49)
dla k = 1;
1.28.3
Człon różniczkujący
H(s) = ks
(50)
dla k = 1:
1.29
. Analiza czestotliwosciowa liniowych systemów regulacji. Charakterystyki Nyquista. Na-
szkicuj charakterystyki Nyquista dla czlonów: proporcjonalnego, calkujacego i róznicz-
kujacego.
Charakterystyki Nyquista = wykresy biegunowe. Odpowiedz w dziedzinie czestotliwosci H(ω) wykreslana jest
na plaszczyznie, na której os pozioma pokazuje wielkosc czesci rzeczywistej H(ω) a os pionowa pokazuje jej
czesc urojona.
15
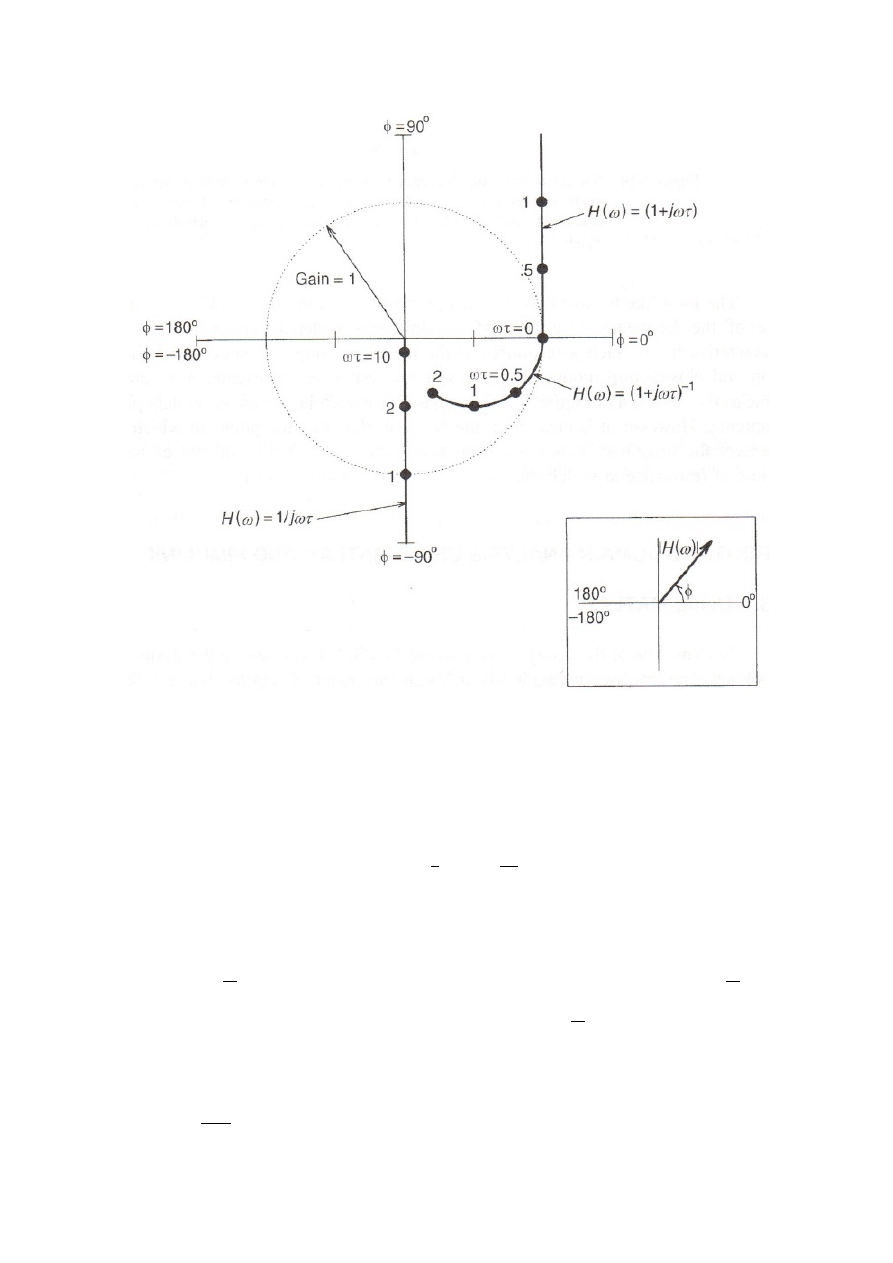
Dla kazdej wartosci ω, H(ω) jest reprezentowana przez wektor, którego dlugosc jest równa wielkosci H(ω).
Okrag narysowany linia kropkowana pokazuje punkty, dla których wzmocnienie |H(ω)| = 1. Przyjeta konwen-
cja, ze rotacji wektora H(ω) w kierunku przeciwnym do kierunku ruchu wskazówek zegara towarzysza dodatnie
wartosci ϕ. Rys. 46 pokazuje wykresy Neguista dla trzech podstawowych funkcji przenoszenia H(ω):
1
s
|
s=jω
=
1
jω
(51)
(1 + s)|
s=jω
= (1 + jω)
(52)
(1 + s)
−1
s=jω
= (1 + jω)
−1
(53)
Sa to kolejno uklady calkujacy, rózniczkujacy oraz inercyjny pierwszego rzedu.
Wykres dla H(ω) =
1
jω
pokrywa się z ujemną częścią osi urojonej. Gdy ω = 0 , wówczas H(ω) =
1
jω
→ −j∞
,
czego rysunek nie pokazuje, gdy. na osi zaznaczono większe wartości odpowiadające kolejno ω = 1, 2, 10. Gdy
ω
rośnie i staje się coraz większe, wowczas punkt odpowiadający H(ω) =
1
jω
zmierza do środka układu wzdłuż
ujemnej części osi urojonej.
Wykres H(ω) = (1 + jω) rozpoczyna się dla ω = 0 na osi rzeczywistej, w punkcie gdzie |H(ω)| = 1. Wraz ze
wzrostem wartości ω , wykres podąża pionowo w gorę, wyznaczając drogę, ktora jest rownoległa do dodatniej
części osi urojonej.
Wykres H(ω) =
1
1+jω
z kolei, rozpoczyna się dla ω = 0 na osi rzeczywistej, w punkcie gdzie |H(ω)| = 1, lecz
ze wzrostem ω zmierza do początku układu współrzędnych po torze w kształcie łuku.
16
1.30
Stabilność układów automatycznej regulacji, kryteria
1.30.1
Kryterium Nyquista
Układ zamknięty jest stabilny, jeżeli charakterystyka amplitudowo-fazowa układu otwartego nie obejmuje punktu
(-1, j0).
1.30.2
Kryterium logarytmiczne Nyquista
Układ zamknięty jest stabilny, jeżeli logarytmiczna charakterystyka amplitudowa układu otwartego posiada war-
tość ujemną dla pulsacji odpowiadającej przesunięciu fazowemu −π.
1.31
Co oznacza utrata stabilności układu regulacji odruchu źrenicy na światło?
????
1.32
Na czym polega i co oznacza utrata stabilności układu regulacji oddechu w zespole Cheyne’a-
Stokesa?
Oddech Cheyne’a-Stokesa (oddech periodyczny) – patologiczny tor oddychania, polegający na występowaniu
bezdechów trwających kilkanaście sekund, po których pojawia się oddech, który jest coraz szybszy i głębszy,
następnie po osiągnięciu maksimum - ulega stopniowemu zwolnieniu i spłyceniu, aż do kolejnego epizodu bez-
dechu. Jest związany z niewydolnością ośrodka oddechowego.
Ośrodek oddechowy jest wrażliwy na stężenie dwutlenku węgla. W momencie wystąpienia bezdechu wzra-
sta jego stężenie, co powoduje jego pobudzenie i pojawienie się coraz szybszego i głębokiego oddychania. Po
zmniejszeniu stężenia dwutlenku węgla we krwi zmniejsza się pobudzenie ośrodka oddechowego, co powo-
duje spowolnienie oddechu aż do jego zatrzymania, co powoduje znów narastanie stężenia CO
2
i powoduje
rozpoczęcie następnego cyklu oddychania.
1.33
Prawa robotyki wg. Isaaca Asimova.
1. Robot nie może skrzywdzić człowieka, ani przez zaniechanie działania dopuścić, aby człowiek doznał
krzywdy.
2. Robot musi być posłuszny rozkazom człowieka, chyba, że stoją one w sprzeczności z pierwszym prawem.
3. Robot musi chronić sam siebie, jeśli tylko nie stoi to w sprzeczności z pierwszym lub drugim prawem.
1.34
Roboty pierwszej generacji – schemat blokowy, właściwości.
Roboty pierwszej generacji (nauczane): urządzenia wyposażone w pamięć, do której są wprowadzane rozkazy, a
następnie, bez ingerencji człowieka, zdolne do wykonania zaprogramowanych czynności. Roboty I-szej genera-
cji nie są zdolne do samodzielnego zbierania informacji o zewnętrznym środowisku pracy oraz mają ograniczone
właściwości funkcyjne. Zalicza się do nich m.in. roboty przemysłowe przeznaczone do podawania i odbierania
obiektów z linii produkcyjnej.
17
1.35
Roboty drugiej generacji – schemat blokowy, właściwości
Roboty drugiej generacji (uczące się). Są to urządzenia, które potrafią rozpoznać obiekt w zbiorze, bez względu
na jego położenie i kształt. Możliwa jest zmiana miejsca pracy robota względem poszukiwanego elementu. Ro-
boty II-giej generacji mają, (choć ograniczoną) możliwość rozróżniania kształtów i położeń dzięki zastosowaniu
układów czujnikowych oraz systemów wizyjnych (kamer), połączonych z jednostką komputerową, analizującą
i przetwarzającą dostarczane sygnały.
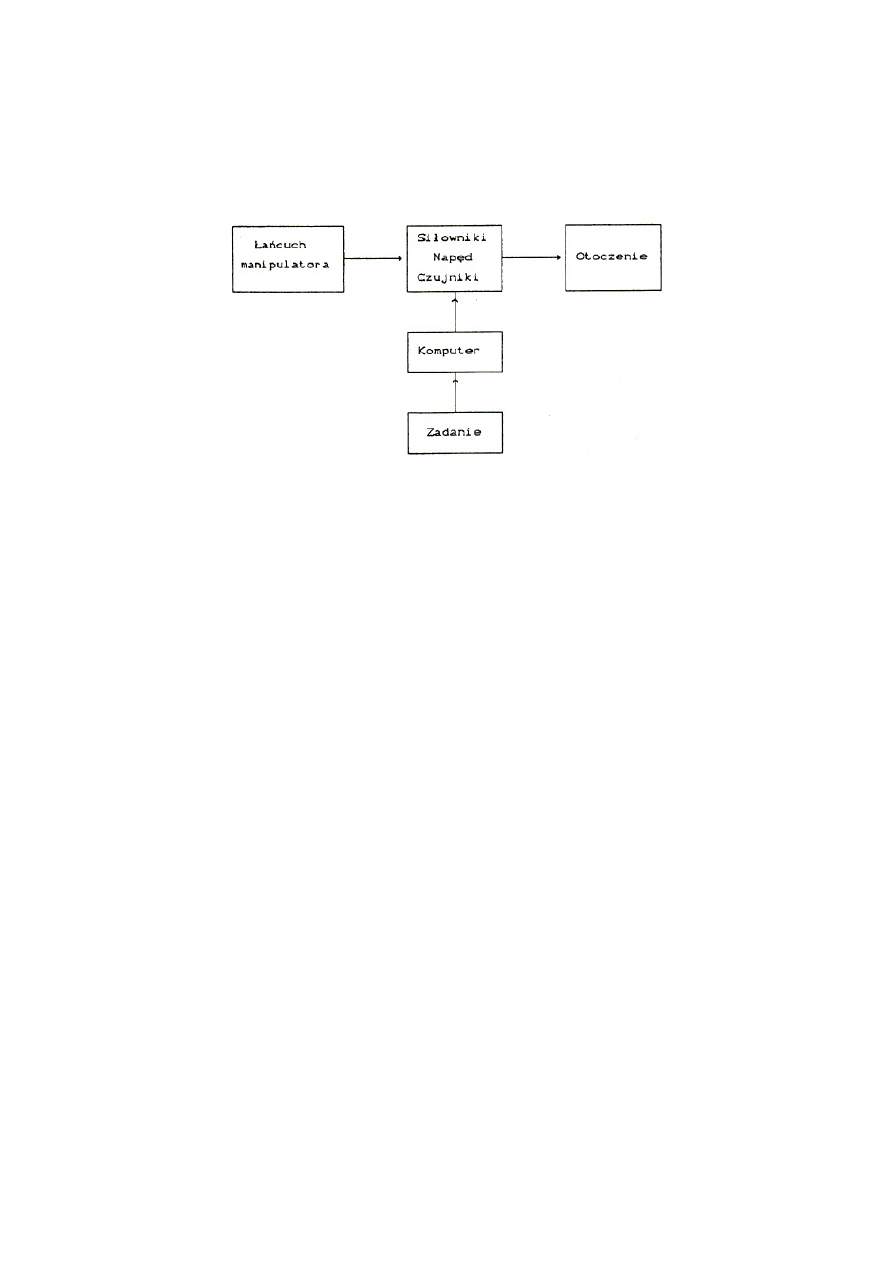
1.36
Roboty trzeciej generacji – schemat blokowy, właściwości
Roboty trzeciej generacji (inteligentne), to urządzenia wyposażone w sztuczną inteligencję. Charakteryzują się
możliwościami „intelektualnymi”, pozwalającymi na działania w zmieniających się warunkach oraz na pracę w
nieznanym wcześniej środowisku. Wyposażenie robota w zaawansowane technologicznie układu czujnikowe,
odpowiedzialne za odbieranie z otoczenia sygnałów wizyjnych, głosowych i dotykowych pozwalają na rozpo-
znawanie przedmiotów w przestrzeni, która została zapisana w pamięci robota. Roboty III-ciej generacji potrafią
działać w nieznanym środowisku.
1.37
Klasyfikacja robotów ze względu na ich zastosowanie
1.37.1
Roboty przemysłowe
Zwykle są programowane do wykonywania wciąż tych samych, powtarzających się czynności, które mogą wy-
konywać bezbłędnie w bardzo długim czasie. W fabrykach pracuje 90 % produkowanych robotów, połowa z tego
używana jest przy produkcji samochodów. Zadania, które wymagają dużej szybkości, dokładności, niezawod-
ności i wytrzymałości mogą być wykonywane znacznie szybciej przez robota niż przez człowieka. W rezultacie
wiele zadań w zakładach produkcyjnych, które dawniej były wykonywane przez ludzi, teraz są zrobotyzowane.
Efektem tego jest zmniejszenie cen towarów masowej produkcji - przede wszystkim części samochodowych i
elektroniki.
1.37.2
Roboty militarne
Najczęstszym zastosowaniem w tej dziedzinie jest rozbrajanie bomb. Roboty produkowane do tego celu mają
postać bardzo stabilnej ruchomej platformy, na której zamocowana jest kamera i silne źródło światła. Robot taki,
kontrolowany zdalnie przez operatora, jest w stanie rozbroić bombę lub przy pomocy manipulatora przenieść ją
w miejsce gdzie detonacja nie wyrządzi nikomu szkody.
18

1.37.3
Roboty medyczne
przykład: Bloodbot to robot wyszukujący naczynia krwionośne i niemal bezboleśnie wykonujący nakłucie.
Według twórcy tego urządzenia – (Alex Zivanovic z Imperial College w Londynie) jego Bloodbot robi to lepiej
niż najbardziej doświadczona pielęgniarka. Roboty medyczne odgrywają wielką rolę w chirurgii. Zwiększają
precyzję działania i ułatwiają małoinwazyjny dostęp do obszaru operacji.
1.38
Trzy główne roboty chirurgiczne (aktualnie w użyciu) do wspomagania zabiegów chirur-
gicznych. Krótka charakterystyka
1.38.1
Da Vinci
charakteryzuje się tym, że dzięki specjalnemu systemowi redukuje efekt drżenia rąk i dokonuje kompensacji
gwałtownych ruchów operatora-chirurga. Urządzenie to w czasie rzeczywistym przekształca ruchy dłoni, nad-
garstka i kciuka chirurga na ruchy instrumentów chirurgicznych umieszczonych w ramionach robota. Chirurg
natomiast podczas operacji wykonywanej przez robota obserwuje przebieg zabiegu w obrazie trójwymiarowym,
dzięki kamerze w jaka wyposażony jest robot.
1.38.2
Zeus
Zeus przeznaczony jest do wykonywania zabiegów małoinwazyjnych. Jest wyposażony w trzy ramiona. Jedno
jest sterowane przez głos, natomiast pozostałe pełnią funkcję rąk chirurga. Bardzo ważną funkcją Zeusa jest
zdolność do wykonywania tzw. mikroruchów, niemożliwych do wykonania ludzką ręką. Ma to ogromne znacze-
nie dla bezpiecznego przebiegu operacji i dla zmniejszenia ewentualnych komplikacji pooperacyjnych. Ponadto
Zeus może przeprowadzić operację kardiochirurgiczną na bijącym sercu bez rozcinania klatki piersiowej. Przez
niewielkie nacięcia wprowadza się do klatki piersiowej mikronarzędzia chirurgiczne i kamerę.
1.38.3
AESOP (od ang. Automated Endoscopic System for Optimal Positioning)
AESOP amerykańskiej firmy Computer Motion to medyczny, zrobotyzowany system endoskopowy służący do
trzymania i stabilizacji kamer podczas małoinwazyjnych operacji chirurgicznych. W pierwszych generacjach
tego urządzenia ruchome ramię robota trzymające laparoskop było sterowane przez chirurga ręcznie lub zdalnie
przyciskami, nowsze modele są kontrolowane za pomocą głosu. Robot ten znalazł już zastosowanie w wielu
dziedzinach medycyny zabiegowej, począwszy od urologii, poprzez ginekologię, aż do chirurgii ogólnej. Do
roku 1999 przeprowadzono ponad 90 000 procedur chirurgicznych z wykorzystaniem technologii AESOP.
1.39
Wymień nie mniej niż 10 rodzajów robotów znajdujących obecnie zastosowanie w różnych
dziedzinach życia.
• Roboty spawalnicze
• Roboty paletyzujące i transportujące
• Roboty malarskie
• Roboty montażowe
• Roboty do przenoszenia materiałów i załadunku palet
• Roboty stosowane do obróbki materiałów
• Roboty do owijania palet (owijarki)
• Roboty policyjne i wojskowe
• Roboty poszukujące i rozbrajające niebezpieczne materiały (np. wybuchowe, radioaktywne, środki bo-
jowe itd.)
19

• Roboty szpiegowskie
• Roboty inspekcyjno – zwiadowcze
• Roboty antyterrorystyczne
• Roboty interwencyjne, do misji poszukiwawczo – ratunkowych
• Roboty do ochrony budynków, roboty patrolujące
• Roboty czynnego ataku
• Roboty defensywne
• Roboty transportujące do zastosowań militarnych
• Roboty edukacyjne, laboratoryjne i badawczo - rozwojowe
• Roboty medyczne i roboty chirurgiczne
• Roboty rehabilitacyjne
• Roboty diagnostyczne
• Roboty do transportu próbek i lekarstw w szpitalach
• Roboty do rozrywki, roboty - zabawki
• Roboty kosmiczne
• Roboty usługowe i osobiste, roboty sektora publicznego
• Roboty sprzątające
• Roboty dla osób starszych i niepełnosprawnych
• Roboty osobiste do zastosowań w gospodarstwach domowych
• Roboty kosiarki
• Roboty strażnicy
• Roboty w budownictwie
• Roboty rolnicze
• Roboty leśne
• Roboty do utylizacji i zabezpieczania odpadów
• Roboty gaszące pożary
• Roboty w biurach i administracji
• Roboty ratunkowe
• Roboty eksploracyjne
• Roboty eksploracyjne pracujące na Ziemi
• Roboty eksploracyjne pracujące w Kosmosie oraz na innych planetach
• Roboty inspekcyjne
20
1.40
Manipulator. Definicja, schemat blokowy
Manipulator to mechanizm cybernetyczny, który jest przeznaczony do wykonywania niektórych funkcji koń-
czyny górnej, ręki (manus – ręka). Wyróżnia się dwa rodzaje manipulatorów: przeznaczony do chwytania (chwy-
tak) oraz przeznaczony do sięgania (wysięgniki).
1.41
Manipulatory antropomorficzne i nieantropomorficzne. Przykłady
Do grupy manipulatorów antropomorficznych zalicza się te manipulatory, które posiadają strukturę składającą
się z trzech przegubów obrotowych. Noszą one nazwę manipulatorów z łokciem. Manipulatory tej klasy posia-
dają często dodatkowe człony w celu zwiększenia liczby stopni swobody, jednak jest to konfiguracja antropo-
morficzna, ponieważ trzy pierwsze pary kinematyczne, licząc od podstawy, są obrotowe. Istnieje także grupa
manipulatorów, które nie spełniają warunku podobieństwa anatomicznego do ręki, lecz mimo to realizują funk-
cje sięgania i chwytania.
1.41.1
Antromorficzne
• Manipulatory pracujące w kosmosie
• Sztucne ramie
1.41.2
Nieantromorficzne
• PUMA
• Manipulator kopiujący
1.42
Telemanipulator. Definicja, zastosowanie
Telemanipulator to zdalny manipulator, to urządzenie, które za pośrednictwem połączeń elektronicznych, hy-
draulicznych lub mechanicznych pozwala, aby mechanizm manipulatora był sterowany przez człowieka – ope-
ratora. Celem może być wykonanie zabiegu chirurgicznego, ale także np. przemieszczenie niebezpiecznych
materiałów. Telemanipulatory chirurgiczne staną się w przyszłości niezbędne do prowadzenia operacji miniin-
wazyjnych. Telemanipulatory chirurgiczne pozwalają na zmniejszenie kosztów zabiegu w stosunku do kon-
wencjonalnej operacji oraz na skrócenie czasu hospitalizacji, i co najważniejsze, zmniejszenie liczby powikłań
pooperacyjnych. Roboty kardiochirurgiczne są manipulatorami.
21
1.43
Wymień i scharakteryzuj trzy podstawowe rodzaje napędów stosowane współcześnie w
robotach.
Współcześnie w robotach stosowane są trzy podstawowe rodzaje napędów: pneumatyczny, hydrauliczny, elek-
tryczny oraz ich kombinacje.
1.43.1
Napędy pneumatyczne
Stosowane są przy niewielkim udźwigu, do 20kg. Pracują w układzie otwartym bez sprzężenia zwrotnego). Na
układ napędu pneumatycznego składają się:
• Blok przygotowania sprężonego powietrza
• Blok sterowania przepływem sprężonego powietrza
• Blok elementów wykonawczych
Główne zalety napędów pneumatycznych to: niski koszt, prosta konstrukcja, odporność naprzeciążenia i wibra-
cje, możliwość pracy w środowisku agresywnym, wystarczająca dokładność pozycjonowania.
1.43.2
Napędy elektrohydrauliczne
Stosowane przy dużym i bardzo dużym udźwigu. Wykorzystywane są w 30przemysłowych. Główne zalety napę-
dów elektrohydraulicznych to: duża szybkość działania, duża dokładność pozycjonowania, łatwość sterowania,
duża trwałość, spokojny, płynny ruch.
1.43.3
Napędy elektryczne
Zastosowanie znajdują:
• Napędy prądu stałego z wysokomomentowymi komutatorowymi silnikami prądu stałego
–
wolnoobrotowe o stałym wzbudzeniu od magnesów stałych,
–
szybkoobrotowe z wirnikiem tarczowym,
• Napędy prądu stałego z bezszczotkowymi silnikami prądu stałego,
• Napędy prądu przemiennego z silnikami asynchronicznymi i synchronicznymi,
• Napędy z silnikami skokowymi (krokowe).
1.44
Wymien i scharakteryzuj 2 przykladowe roboty mobilne (mozliwosci, zastosowanie,itp.).
1.44.1
ASIMO (ang. Advanced Step in Innovative MObility)
to robot humanoidalny stworzony przez japonska firme Honda. Nazwa robota nie jest zwiazana z nazwiskiem
pisarza science fiction Isaaca Asimova. ASIMO jest uwazany za jeden z najbardziej rozwinietych technicznie
chodzacych robotow. Projekt rozwija sie od roku 1986. W pierwszej wersji umial chodzic do przodu, do tylu, w
bok, biegac, omijac przeszkody, zawracac i wchodzic w interakcje z otoczeniem. W kolejnych wersjach otrzymal
mozliwosc skretu bioder, zginania karku, nadgarstkow i palcow. Rozpoznaje ludzi w ruchu oraz ich twarze, po-
trafi podazac za czlowiekiem, przychodzi na zawolanie i rozpoznaje 50 japonskich zwrotow. Asimo najwierniej
z dotychczas stworzonych robotow odtwarza ruchy, jakie wykonuja ludzie przy chodzeniu. Projektem powaznie
zainteresowana jest NASA i zamierza wykorzystac Asimo w lotach na Marsa. Aktualnie predkosci biegu Asimo
wynosi 6 km/h, moze takze biegac po okregu o srednicy 2,5 metra z predkoscia 5 km/h. Predkosc chodu wynosi
2,7 km/h. Asimo potrafi spacerowac trzymajac za reke osobe towarzyszaca.
Dane techniczne
• Waga: 54 kg (pierwotnie 52 kg)
22

• Predkosc chodu: 2,7 km/h (we wczesniejszych wersjach kolejno 1,6 km/h i 2,5 km/h)
• Predkosc biegu na wprost: 6 km/h (pierwotnie 3 km/h),
• Predkosc biegu po okregu (o srednicy 2,5 m) - 5 km/h
• Wysokosc: 130 cm (pierwotnie 120 cm)
• Szerokosc: 45 cm
• Glebokosc: 44 cm
• Czas dzialania: 1 godzina (pierwotnie 30 minut). Ograniczenie wynika z wytrzymalosci baterii.
1.44.2
Actroid
Zostal zaprojektowany przez inzynierow z Osaka University i wyprodukowany przez Kokoro Company. Po raz
pierwszy Actroid zostal pokazany w 2003 roku podczas miedzynarodowej wystawy robotow w Tokio. Od tam-
tej pory stworzono kilka modeli urzadzenia, z ktorych wiekszosc posiada wyglad mlodej japonskiej kobiety.
Actroid potrafi wykonywac czynnosci typowe dla ludzi - mruga oczami, mowi i oddycha. Powstalo kilka modeli
Actroida: Repliee Q1, Repliee Q2, Repliee R1, DER, DER2, Simroid oraz meska wersja robota (Male Ac-
troid czyli Geminoid HI-1), rozniace sie miedzy soba stopniem zawansowania technologicznego i wygladem.
Przykladowo, Actroid-DER, skonstruowany do obslugi klientow, zaprezentowany zostal na 2005 Expo Aichi
Japan. Robot mowi po japonsku, chinsku, koreansku i angielsku. Producent Actroida - firma Kokoro umozli-
wia wynajecie robota wraz z odpowiednim przebraniem i charakteryzacja do roznych celow komercyjnych, np.
do kawiarni, barow, punktow informacyjnych, zespolow biurowych, hoteli czy muzeow - wszedzie tam gdzie
moze okazac sie pomocny przy witaniu gosci i wskazywaniu kierunkow. Robot moze tez okazac sie przydatny w
celach szkoleniowych, np. dla stomatologow. Model Actroid Simrod zostal przerobiony na manekina treningo-
wego dla dentystow. Ludzki wyglad i reakcje Simroid maja pomóc studentom stomatologii i mlodym dentystom
nauczyc sie jak obchodzic sie z przyszlymi pacjentami.
1.45
Czujniki stosowane w robotach. Klasyfikacja ze wzgledu na wielkosc mierzona i rodzaj
kontaktu z otoczeniem.
Czujnik to fizyczne (biologiczne) narzedzie, bedace czesto elementem skladowym innego ukladu, ktorego za-
danie polega na pobieraniu sygnalow z otoczenia, ich rozpoznawanie oraz rejestrowaniu. Klasyfikacji czujnikow
mozna dokonac ze wzgledu na:
1.45.1
Wielkosc mierzona
• Czujniki do pomiaru stanu wewnetrznego robota. Mierza one wielkosci wewnetrzne robota, np.: napiecie
zasilania lub predkosc obrotowa silnika.
• Czujniki do pomiaru stanu zewnetrznego robota. Sluza one do pomiaru takich wielkosci jak odleglosc lub
natezenie swiatla.
1.45.2
Rodzaj kontaktu z otoczeniem
• Czujniki kontaktowe, ktore wysylaja sygnal, gdy robot ma bezposredni kontakt z otoczeniem.
• Czujniki bezkontaktowe, ktore nie maja bezposredniego kontaktu z otoczeniem, np. czujniki swiatla.
23
1.46
Klasy czujników stosowanych w robotyce.
• Czujniki odleglosci, ktore mierza odleglosc pomiedzy robotem (jego czujnikiem) a wybranymi przed-
miotami lub obiektami.
• Czujniki polozenia bezwzglednego, ktore umozliwiaja okreslenie polozenia robota w przestrzeni np. przez
podanie dlugosci i szerokosci geograficznej.
• Czujniki kierunku, ktore pozwalaja na „zorientowanie” robota np. wzgledem biegunow pola magnetycz-
nego.
• Czujniki srodowiska, aby mozna bylo zmierzyc temperature srodowiska, jego wilgotnosc itd.
• Czujniki inercyjne do pomiaru przyspieszenia robota.
1.47
Czujniki dotyku. Skóra sensoryczna
Sztuczna skóra androidów powinna byc zarówno elementem ochronnym jak i dekoracyjnym. Aby zapewnic ro-
botowi funkcjonalnosc musi byc wyposazony w sensory, które beda pelnily role polaczen nerwowych. Znaczne
powierzchnie czule na dotyk uzyskuje sie poprzez zgrupowanie duze liczby sensorów dotyku w postaci matrycy
sensorów (sztuczna skóra=skóra sensoryczna). Skóra androida musi ochraniac jego wnetrze, byc elastyczna, za-
chowywac stabilnosc termiczna (rysy twarzy musza byc niezmienne przy zmianie temperatury). Skóra musi byc
wodoodporna i nie ulegac zniszczeniu w kontakcie z wieloma chemikaliami (kwasy, detergenty...). Materialy
stosowane do produkcji skóry androidów w chwili obecnej sa polimery silikonowe, które pod wieloma wzgle-
dami przewyzszaja polimery piankowo-gumowe (latex). Sa one odporne na wode i wiele rozpuszczalników, sa
mocniejsze, bardziej wytrzymale i mozna z nich zrobic ciensza skóre co pozwoliloby androidom nasladowac
mimike ludzkiej twarzy. Najlepsze cechy z wszystkich silikonów wykazuje ten z domieszkami platyny, który
rozciaga sie bez utraty wlasciwosci i bez deformacji, do rozmiarów znacznie przekraczajacych jego pierwotne
wielkosci. Czujniki dotyku sa takze wykorzystywane w chwytakach manipulatorów. Wyróznia sie tutaj czujniki
dotyku przelaczników i czujniki dotyku ciaglego dzialania.
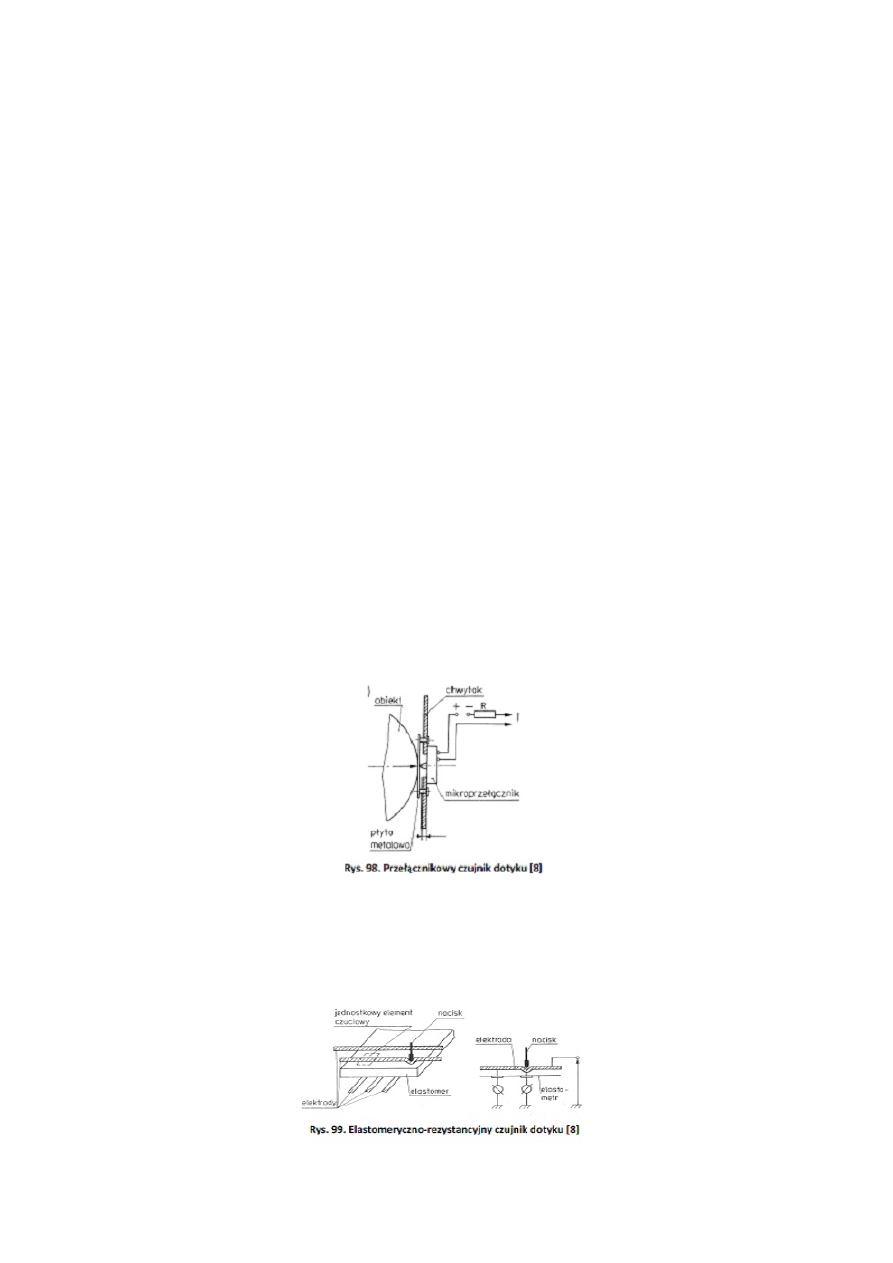
Czujnik przelacznikowy zbudowany jest z plytki metalowej, która odksztalca sie w kontakcie z obiektem.
Odksztalcajac sie pod wplywem nacisku plytka dociska z kolei mikroprzelacznik, co powoduje zmiane wartoosci
pradu wyjsciowego.
24
Zasade dzialania czujnika dotyk°u ciaglego wykorzystujacego tzw. efekt elastomeryczno-rezysstancyjny
przedstawia rys.99. Efekt ten polega na zmianie rezystancji przejscia pomiedzy dwoma elektrodami przylozo-
nymi do elastomery w wyniku zewnetrznej sily naciku. Wraz ze wzrostem sily nacisku, maleje rezystancja i
rosnie wartosc pradu plynacego przez elektrody, co powoduje wzrost sily nacisku.
1.48
Czujnik położenia. Enkodery
Jako czujniki polozenia wykorzystywane sa tzw. enkodery. Wyróznia sie dwie podstawowe grupy en koderów:
inkrementalne i absolutne, rózniace sie pod wzgledem budowy. Enkodery inkrementalne okreslaja predkosc
katowa, kierunki ruchu. Moga takze okreslic pozycje wzgledna, czyli róznice pomiedzy dwoma wartosciami
katów obrotu, oraz moga byc stosowane w ukladach zliczajacych liczbe pelnych obrotów. Enkodery optyczne sa
zaliczane wlasnie do tej grupy. Enkodery absolutne pozwalaja na okreslenie biezacej pozycji na osi. Enkodery
te wykorzystuja tarcze gdzie naniesione sa okregi tworzace dla ukladu odczytujacego kod cyfrowy (Gray’a lub
BCD). Wsród en koderów absolutnych wyróznia sie jedno i wieloobrotowe. Pierwsze powtarzaja informacje
o kacie obrotu o 360°a drugie informuja o liczbie wykonanych obrotów. Enkodery optyczne sa stosowane w
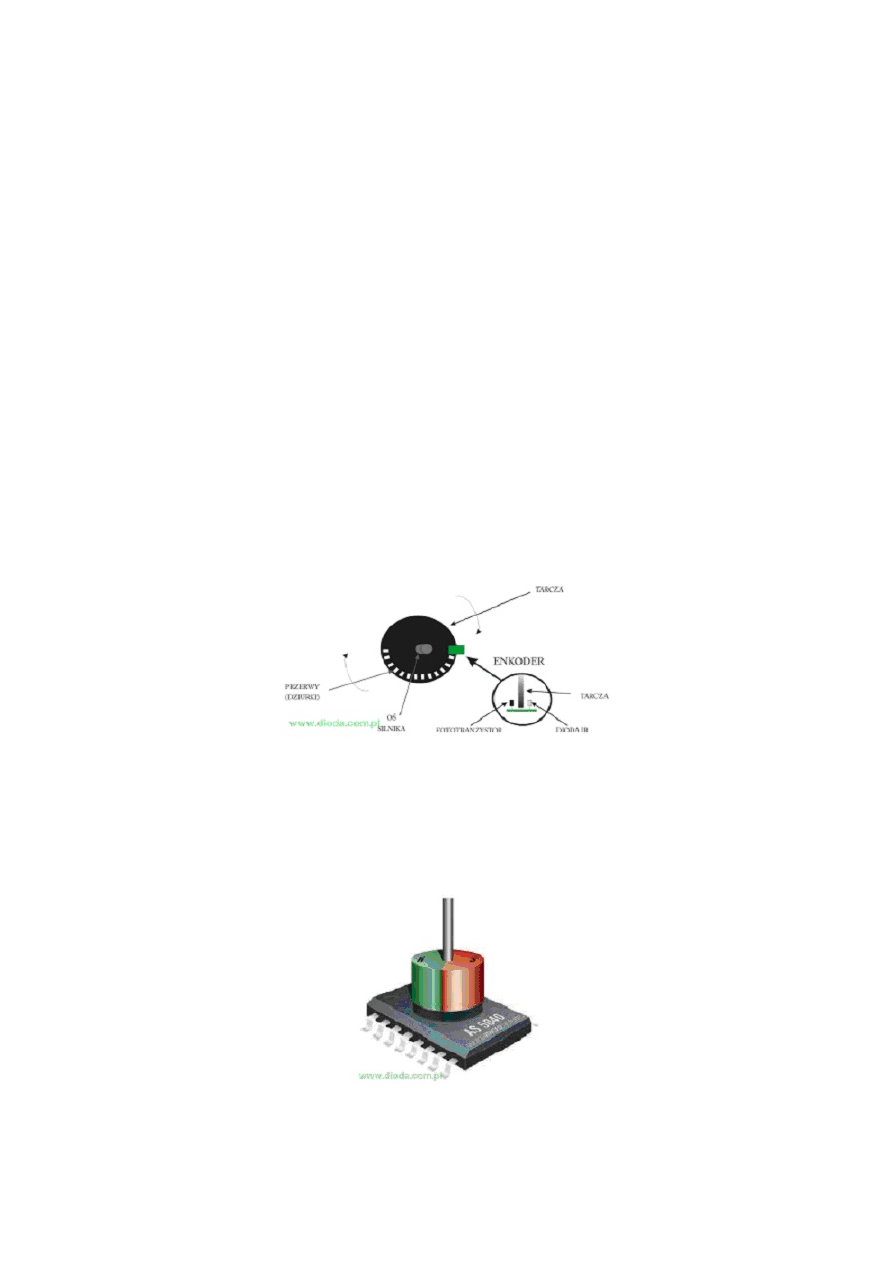
np. myszkach, drukarkach, ale takze jako czujniki polozenia w robotyce. Glównym elementem eknkodera jest
dysk (tarcza) wyposazony w szereg otworów, polaczony z poruszajaca nim czescia, oraz zródlo swiatla (zwykle
jest to dioda Ir lub LED). Enkoder umieszczany jest tak, aby swiatlo z diody przechodzilo przez otwory w
dysku. Po drugiej stronie dysku znajduje sie czujnik swiatla (fototranzystor), który wysyla impuls prostokatny do
ukladu zliczajacego. Fototranzystor wysyla impuls za kazdym razem, gdy swiatlo diody przechodzi przez otwór
tarczy. Na tej podstawie uklad zliczajacy pomaga okreslic polozenie tarczy. Takie rozwiazania sa stosowane w
manipulatorach i robotach. Na rysunku przedstawiono urzadzenie skladajace sie z en kodera, tarczy oraz ukladu
wykonawczego.
Enkoder umozliwia pomiar obrotu kola, dzieki temu robot moze np. ustalic predkosc, przyspieszenie czy kat
obrotu. Enkodery magnetyczne sa podobne do optycznych, lecz zamiast fototranzystora stosowany jest czujnik
magnetyczny, a na tarczy umieszczone sa na przemian magnesy N i S. Role takiego czujnika pelni np. uklad
AS5040.
Czujnik ten jest odpowiedni do pomiarów predkosci obrotowej oraz do pomiaru polozenia na osi napedowej.
Uklad ten generuje impulsy wraz ze zmiana bieguna na jego czujniku. Wewnatrz As5040 znajduje sie procesor
25
polaczony z matryca czujników pola magnetycznego.
1.49
Czujniki predkosci liniowej i katowej stosowane w robotach.
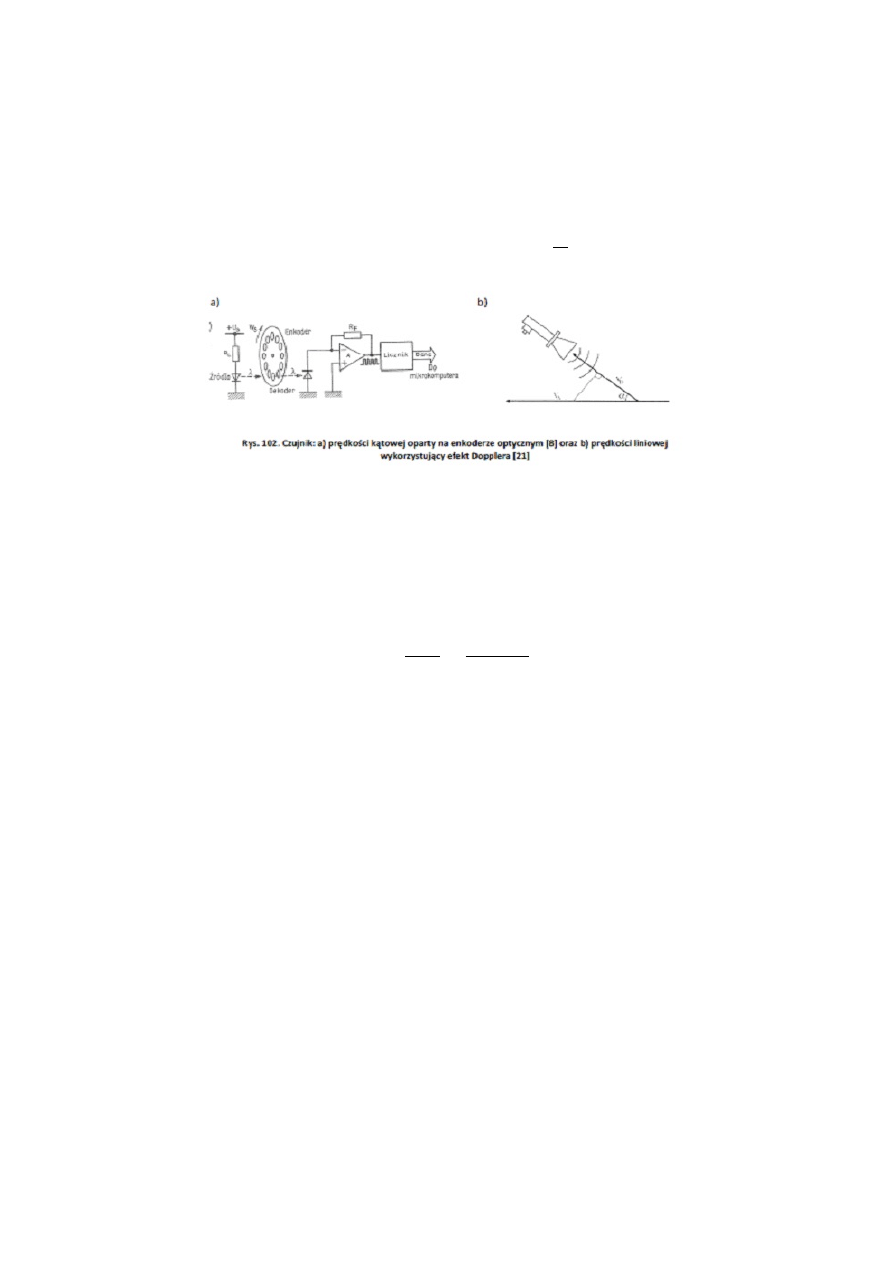
Jako czujniki predkosci w robotyce wykorzystywane sa glównie optyczne en kodery przyrostowe-tachogeneratory.
Mierza one predkosc proporcjonalna do predkosci walu obrotowego. Istnieje takze grupa czujników predkosci
wykorzystujaca czujniki polozenia (np. en koder optyczny) i uklad rózniczkujacy (predkosc to pochodna drogi
po czasi a predkosc katowa to pochodna kata obrotu α po czasie → ω =
dα
dt
). Zasadę działania ilustruje rysunek:
Do pomiaru predkosci liniowej wykorzystywane sa czujniki wykorzystujace efekt Dopplera (rys.b ) Zjawisko
Dopplera polega na powstawaniu róznicy czestotliwosci fali wysylanej przez zródlo oraz fali odebranej przez
obserwatora, w przypadku, gdy obserwator porusza sie wzgledem nieruchomego zródla lub zródlo porusza
sie wzgledem nieruchomego obserwatora. Efekt zalezy od predkosci obserwatora/zródla wzgledem osrodka, w
którym fale sie rozchodza. Zaleznosci sa nastepujace:
V
A
=
V
D
cos α
=
cF
D
2F
0
cos α
(54)
Gdzie:
• V
A
- prędkość aktualna względem ścieżki
• V
D
- zmierzona prędkość Dopplera
• α - kąt nachylenia
• c - prędkość światła
• F
D
- zmierzona zmiana częstotliwości sygnału (przesunięcie Dopplera)
• F
0
- częstotliwość nadawanego sygnału
Jak wynika z powyzszego, aktualna predkosc poruszania sie po sciezce V
A
zależy od stosunku zierzonej zmiany
częstotliości F
D
fali odebranej względem fali padającej na ruchomy obiekt, do częstotliwości nadanego sygnału,
tzn. fali padającej F
0
.
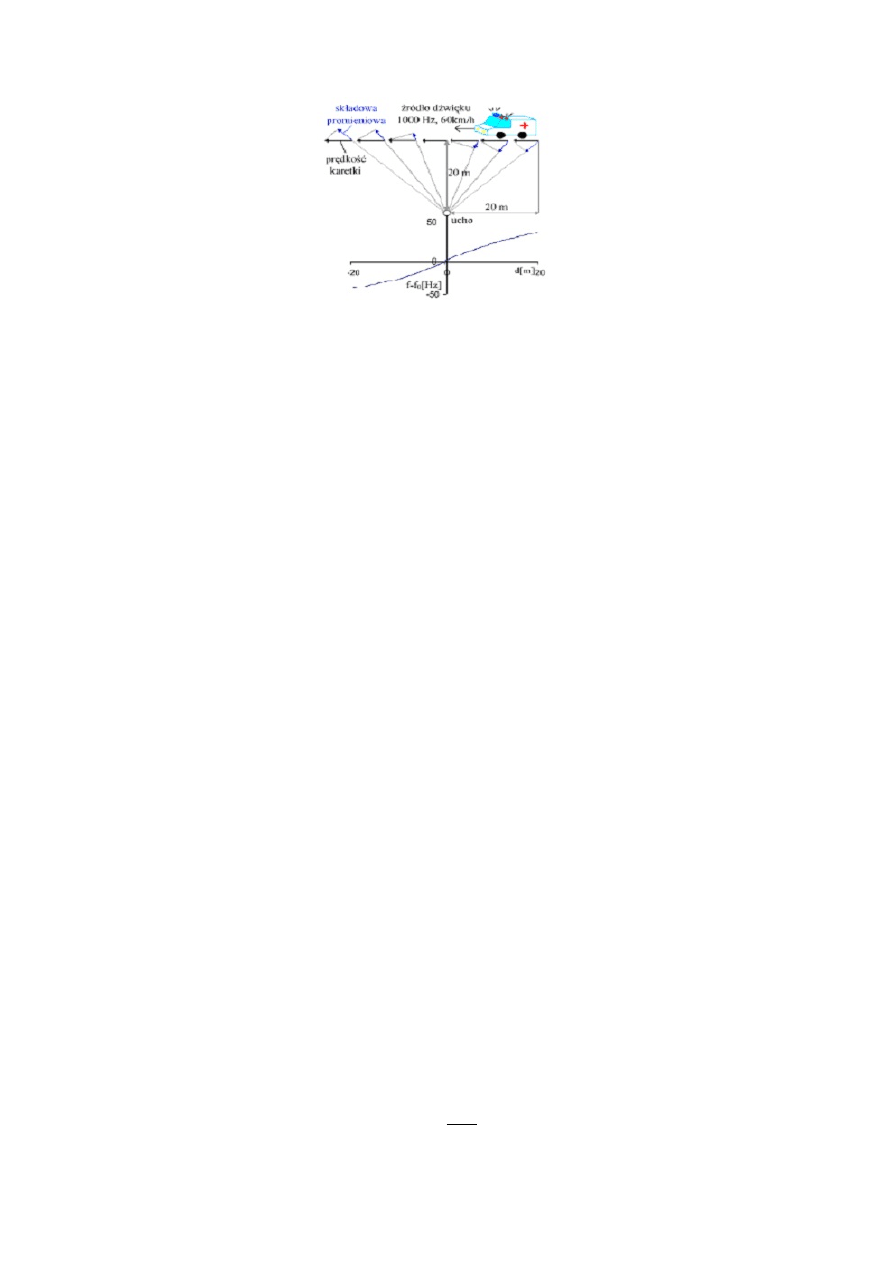
Dzwiek jadacej karetki jest wysoki, gdy karetka jest daleko, obniza sie stopniowo, gdy karetka zbliza sie, w
momencie mijania obserwatora odbierany dzwiek jest zgodny z wysylanbym w miare jazdy karetki obniza sie.
Efekt ten powstaje na skutek zmiany skladowej promieniowej predkosci karetki. Znaczenie ma tylko skladowa
promieniowania (przyblizanie/oddalanie sie od karetki). Zmienia sie ona, zaleznie od kata miedzy kierunkiem
laczacym karetke z obserwatorem, a kierunki ruchu karetki od obserwatora.
26
1.50
Czujniki sił stosowane w robotach
Czujniki sily maja zastosowanie w ukladach zabezpieczajacych przed przeciazeniami mechanicznymi. Szeroko
stosowane sa czujniki tensometryczne. Zasada dzialania tensometrycznego czujnika polega na pomiarze od-
ksztalcenia elementu sprezystego pod wplywem dzialania sily. Na takim elemencie naklejony jest czujnik ten-
sometryczny. Czujniki tensometryczne, tensometry, stosowane sa w urzadzeniach wazacych, do pomiaru sil sci-
skajacych, rozciagajacych itp. Obecnie najszersze zastosowanie znajduja tensometry oporowe. Posiadaja wiele
zalet: duza czulosc i dokladnosc, odpornosc na drgania i wstrzasy, moga byc umieszczane na powierzchniach
zakrzywionych. Zasada dzialania tensometru oporowego bazuje na zmianie wartosci opornosci drutu (folii me-
talowej) wraz ze zmiana dlugosci. Drut oporowy (lub folia) naklejany jest za pomoca specjalnego kleju na
element odksztalcajacy sie pod wplywem dzialajacych sil. Material oporowy czujnika ulega identycznym od-
ksztalceniom jak element, na którym czujnik zostal przyklejony. Najczescie spotykane sa gotowe czujniki w
postaci tensometru foliowego przyklejonego do obudowy. W zaleznosci od konstrukcji obudowy czujnik moze
sluzyc do pomiaru malych sil lub duzych sil.
1.51
Czujniki odległości stosowane w robotach
Podstawowymi czujnikami, w jakie wyposazone sa chwytaki maszyn manipulacyjnych stosowanych wspólcze-
snie w robotyzacji procesów produkcyjnych, sa:
• Czujniki zblizenia chwytaka lub koncówek chwytnych do obiektu
• Czujniki dotyku koncówek chwytnych do powierzchni obiektu
• Czujniki nacisku koncówek chwytnych na obiekt
Jako czujniki zblizenia wykorzystuje sie przewaznie przetworniki indukcyjne, pojemnosciowe oraz optyczne.
Czujniki dotyku to z reguly elementy stykowe ymieszczone w korpusie chwytaka w taki sposób, aby przemiesz-
czenie koncówki chwytnej powodowalo ich przelaczenie. Dla pomiaru nacisku koncówek chwytnych na obiekt
manipulacyjny, wykorzystuje sie przetworniki tensometryczne. Czujniki zblizenia, poza wykorzystaniem ich w
chwytakach i manipulatorach, sa niezbedne do wykrywania przeszkód na trajektorii robotów mobilnych. Takie
czujniki czesto umieszcza sie w chwytaku robota. Zakres dzialania czujników zblizenia wynosi od 1mm do
200mm
1.51.1
Pomiar odleglosci za pomoca czasu przelotu
Pomiar odleglosci d pomiedzy czujnikiem a obiektem wymaga znajomosci predkosci propagacji v fali (ultra-
dzwiekowej, radiowej, swietlnej), pomiaru czasu propagacji t oraz obliczen:
d =
v ∗ t
2
(55)
27

1.51.2
Pomiar odleglosci z wykorzystaniem pomiaru przesuniecia fazowego
W kierunku obiektu wysylana jest fala (laserowa, radiowa, akustyczna), której niewielka czesc powraca w postaci
fali odbitej. Przesuniecie fali odbitej wzgledem wyslanej wynosi:
Φ =
4πd
λ
zatem d =
Φλ
4π
=
Φc
4πf
(56)
Zatem dla znanych wartosci f fali padajacej i c predkosci swiatla, po zmierzeniu przesuniecia fazowego pomiedzy
dwoma sygnalami, mozliwe jest obliczenie odleglosci pomiedzy czujnikiem i obiektem.
1.52
Systemy wizyjne w robotyce
System wizyjny to implementacja wizji komputerowej w robotyce i w produkcji przemyslowej. Wizja kompu-
terowa dotyczy przetwarzania obrazu na poziomie sprzetowmn, natomiast systemy wizyjne wykorzystuja do-
datkowo urzadzenia input-output oraz sieci komputerowe do przesylania informacji np. do i od ramion robota.
Jednym z najczestszych zastosowac systemów wizyjnych jest kontrola produktów (mikroprocesory, samochody,
zywnosc, farmaceutyki). Pozwala to na automatyzacje procesu kontroli, na zwiekszenie dokladnosci i wydajno-
sci. W systemach kontroli jakosci wystepuje czesto koniecznosc bezdotykowej kontroli parametrów przedmiotu.
Wymaga to stosowania zaawansowanych systemów wizyjnych wykonujacych wiele pomiarów w krótkim czasie
oraz zapewniajacych wymiane informacji z systemami automatyki. Pozwalaja one na kontrole:
• Zgodnosci pomiarów z dokladnoscia do mikrometrów,
• Wykrywanie pekniec i rys w strukturze produktu,
• Sprawdzanie stanu napelnienia w opakowaniu,
• Odczyt kodów kreskowych.
• Odczyt dowolnych tekstów nadrukowanych i zatlaczanych.
• Rozpoznawanie kolorów.
Systemy wizji maszynowej w porównaniu z inspekcja dokonywana przez ludzi sa dokladniejsze i szybsze, jed-
nak nie maja zdolnosci przystosowania sie jakie posiada czlowiek. Czujnik synchronizujacy okresla, kiedy pro-
dukt osiagnal pozycje, w której ma byc sprawdzany. Sygnal z czujnika uruchamia kamere, która rozpoczyna
pobieranie obrazu. Obraz przetworzony do postaci cyfrowej zapisany jest zapisywany do pamieci komputera,
w celu jego pózniejszego przetworzenia. Nastepuje przetwarzania obrazu (odszumianie, mierzenie rozmiarrów,
defektów itd.). Na zakonczenie procesu nastepuje raport o stanie. Test negatywny powoduje wyslanie sygnalu
do odrzucenia produktu, lub zatrzymaniu linii produkcyjnej.
1.53
Składowe systemu wizyjnego maszyny-robota
Typowy system wizyjny zawiera:
• Kamery cyfrowe lub analogowe, monochromatyczne lub kolorowe, wraz z interfejsem do digitalizacji
obrazu.
• Procesor/komputer PC.
• Urzadzenie I/O (wejscie/wyjscie) wykorzystywane do przesylania raportów z wynikami pracy systemu.
• Soczewki do robienia zblizen.
• Wyspecjalizowane zródla swiatla (diody LED, swiatla fluorescencyjne, lampy halogenowe itd).
• Program do przetwarzania obrazu i wykrywania cech obrazów.
• Czujnik synchronizujacy do wykrywania obiektów, który daje sygnal do rozpoczecia pobierania i prze-
twarzania obrazu.
• Elementy wykonawcze do usuwania lub odrzucania produktów z defektami.
28

1.54
Techniki przetwarzania stosowane w systemach wizyjnych
Na oprogramowanie systemów wizyjnych sklada sie wiele róznych technik przetwarzania obrazu, takich jak:
• Liczenie pikseli.
• Binaryzacja.
• Segmentacjia.
• Rozpoznanie obrazu
• Czytanie kodu kreskowego.
• Rozpoznanie tekstu.
• Mierzenie rozmiarów obiektu.
• Wykrywanie krawedzi.
• Dopasowanie szablonów.
• Inne.
Zazwyczaj systemy wizyjne wykorzystuja kombinacje tych technik przetwarzania.
1.55
Zastosowanie wizji maszynowej-biometria
Biometria to sposób rozpoznawania i identyfikacji osób oparty na cechach fizycznych i behawioralnych: cha-
rakterystyki linii papilarnych, ksztalt twarzy czy dloni, teczówki oka, pisma recznego, jak równiez mowy, czy
sposób uderzania w klawisze, a nawet uklad zyl nadgarstka. Biometryka moze byc wykorzystana do uniemo-
zliwienia nieautoryzowanych prób dostepu do bankomatów, komputerów osobistych, sieci komputerowych, te-
lefonów komórkowych, domowych systemów alarmowych, itd. W chwili obecnej najpopularniejsze techniki
biometrycznych mozna wymienic:
• Systemy oparte o wzór linii papilarnych.
• Systemy oparte o geometrie dloni.
• Systemy oparte o dynamike mowy.
• Systemy oparte o wzór teczówki oka.
1.56
Zastosowanie wizji maszynowej-radiologia interwencyjna
Radiologia interwencyjna, tzw chirurgia wewnatrznaczyniowa, zajmuje sie leczeniem niektórych schorzen za
pomoca metod wykorzystywanych przez radiologów do cewnikowania naczyn. Zabiegi wykonywane pod kon-
trola technik wizualnych (promieni rentgenowskich, ultrasonografii lub urzadzen MRI. Do zabiegów takich
naleza m.in.: rozszerzanie naczyn zwezonych, np. w miazdzycy, re kanalizacja naczyn, embolizacja, która jest
jedna z metod wylaczania naczyniaka (takze tetniaków). Polega ona na wewnatrznaczyniowym zaklejaniu na-
czynia za pomoca kleju, przez co w miejscu gdzie naczyniak sie rozwinal sciana naczynia ulega wzmocnieniu.
Eliminuje mozliwosc pekania i krwawienia. Zaklejanie polega na podejsciu za pomoca mikrocewnika (w pa-
chwinie) do zmienionego chorobowo miejsca (np. w mózgowiu). Zabieg trwa ok. 1-3 godzin. To nowa specjal-
nosc z pogranicza radiologii i chirurgii.
29
1.57
Zastosowanie wizji maszynowej - zdalne baranie i procedury medyczne
Wizja maszynowa znajduje szerokie zastosowanie w patomorfologii. Patomorfologia jest czescia nauki o choro-
bach, czyli patologii. Wykorzystuje takie metody jak sekcja zwlok, biopsje, mikroskopia wraz z cyfrowa analiza
obrazu, telemedycyna itd. Jest niezbedna w skutecznej diagnostyce chorób nowotworowych.
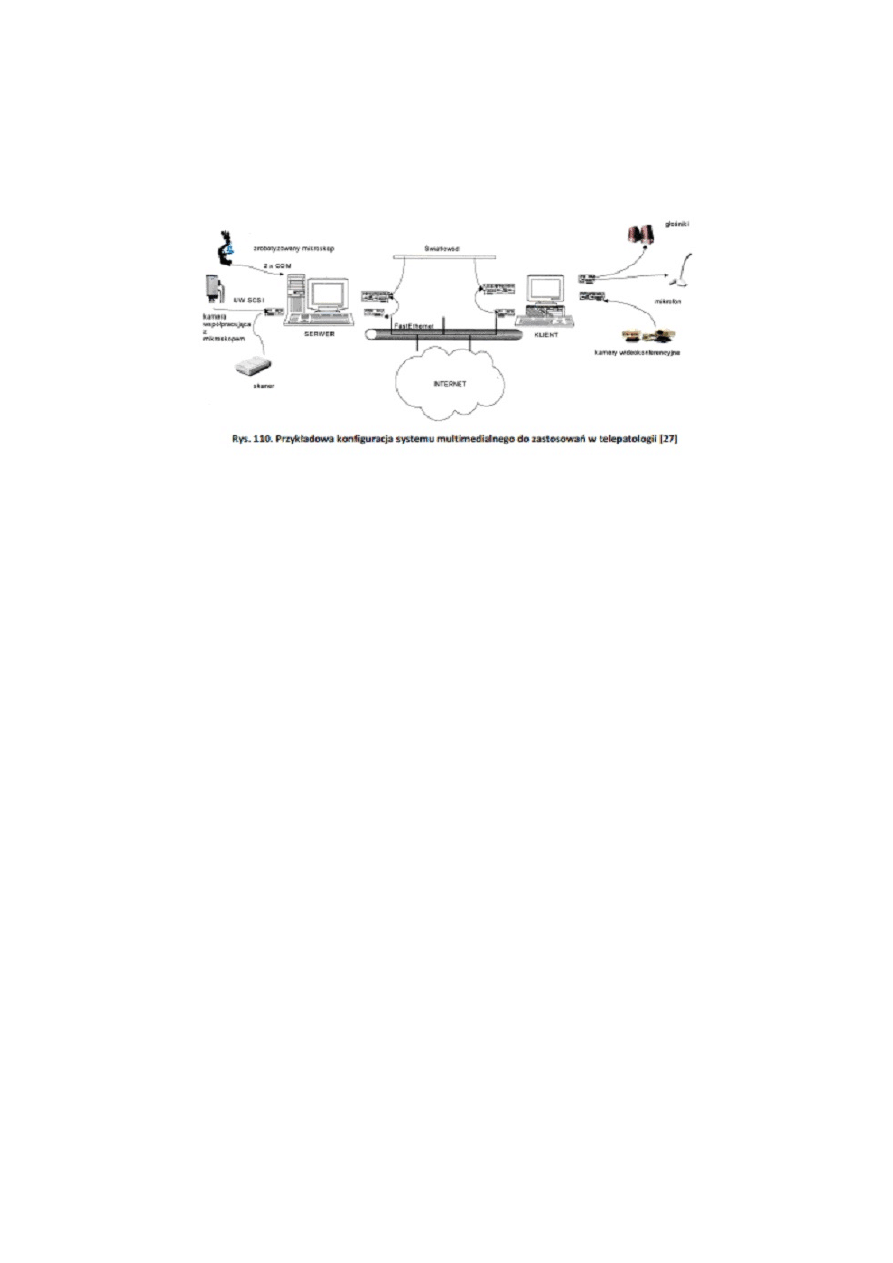
System wspólpracuje z kamerami cyfrowymi i ze skanerami. Jest on przeznaczony do wspólpracy z mikroskopem-
robotem, którego parametry pracy mozna zmieniac zdalnie. Glównym elementem systemu jest mikroskop slu-
zacy do analizy próbek tkanek. Komputer-serwer steruje mikroskopem. Polaczony jest z siecia i to pozwala
dodatkowo na zdalne sterowanie mikroskopem przez klienta oraz na biezace konsultacje, wymiane pogladów
odnosnie stanu badanej próbki. Dzieki wdrozeniu telepato logii jest mozliwe szybkie przesylanie informacji
pomiedzy szpitalami a takze mozliwa jest zdalna diagnostyka i zdalne konsultacje.
1.58
Systemy sztucznego widzenia dla osób niewidomych
System sklada sie z miniaturowej kamery video, procesora sygnalu oraz z implantów umieszczonych w mózgu
w poblizu obszarów odpowiedzialnych za widzenie. Gdy do tych obszarów nie dociera sygnal "wizji"mózg nie
widzi, czlowiek jest niewidomy. Kamera zamontowana jest w okularach. Procesor sygnalów prztwarza obraz z
kamery na szereg sygnalów, które sa podobne do tych, jakie odbiera mózg osoby widzacej. Nastepnie sygnal
przesylany do implantu w mózgu- mózg moze źobaczycóbraz.
1.59
Sterowanie manipulatorów i robotów
Jednostka sterownicza, w przypadku stosowania komputerowego sterownika, zawiera glówny pulpit sterowni-
czy maszyn ze wskaznikami oraz przyciskami do recznego sterowania i wprowadzania informacji. W obecnie
produkowanych robotach nieodlacznym elementem ukladu sterowania jest reczny panel sterujacy. Za pomoca
takiego panel mozna recznie sterowac robotem, pisac program sterujacy, kompilowac, uruchomic, zatrzymywac
programy. Dodatkowym elementem ikladu sterowania jest komputer, który moze wspólpracowac z tym ukla-
dem za pomoca odpowiednich aplikacji. Takie aplikacje umozliwiaja pelna komunikacje z robotem, ponadto
sa wygodniejsze do tworzenia programów sterujacych z wykorzystaniem komputera zamiast recznego panela
sterujacego.
30
1.60
Typowy uklad sterowania manipulatora. Schemat blokowy
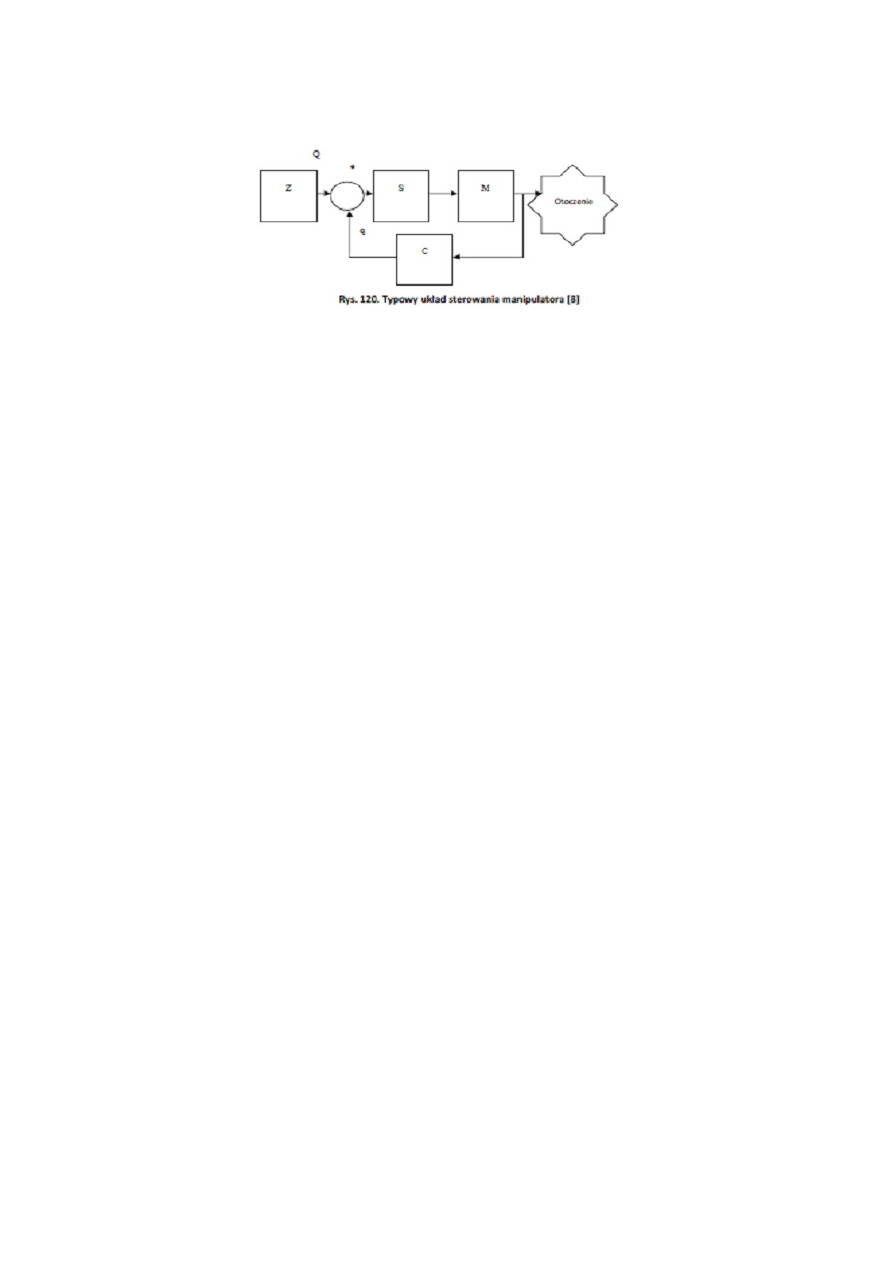
Zadaniem tego ukladu jest wyznaczenie takich sygnalów sterowania silownikami robota, aby umozliwic ro-
botowi realizacje zadanej trajektorii ruchu. Te sygnaly sterowania sa obliczane przy wykorzystywaniu zbioru
informacji-sygnalów pochodzacych z czujników w ukladzie sprzezania wrotnego.Symbole z rysunku:
• Z- zadajnik, zadaje konfiguracje (trajektorie) odniesienia Q, pozadana droge, polozenie.
• S- uklad sterowania (sterownik.
• M- manipulator.
• q- rzeczywista konfiguracja, jaka przyjal manipulator w wyniku sygnalu sterowania.
• C- zespól czujników pomiarowych (polozenia i predkosci).
• e- blad regulacji, róznica miedzy rzeczywista i pozadana konfiguracja manipulatora.
W wyniku istnienia róznicy pomiedzy zadana wielkoscia Q i rzeczywista jej realizacja q, powstaje sygnal e,
który dziala na sterownik S, a ten na manipulator M tak, aby blad e zostal zminimalizowany (zlikwidowany).
Zadanie sterowania manipulatorem robota (robotem) rozpatruje sie jako zadanie planowania trajektorii ruchu.
Wyróznia sie:
• Sterowanie lokalne, poszczególnymi czlonami manipulatora
• Programowe sterowanie ruchem w przestrzeni kartezjanskiej
• Sterowanie adaptacyjne
W kazdym z tych przypadków tworzy sie i rozwiazuje równania dynamiki ruchu manipulatora. Sa to zlozone,
nieliniowe r.r. drugiego rzedu. Do rozwiazania tych równan musza byc zdefiniowane macierze bezwladnosci
poszczególnych czlonów, wspólczynnik tarcia i dane dotyczace geometrii czlonów manipulatorów
31
Wyszukiwarka
Podobne podstrony:
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN 3
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN 2
Opracowanie pytań MC OMEN
Opracowanie pytan MC KULA MC OM Nieznany
Opracowanie Sciaga MC OMEN
Opracowanie wykladow MC OMEN
Opracowanie projektu MC OMEN
Opracowanie Sciaga MC OMEN
Opracowanie wykladow MC OMEN
więcej podobnych podstron