Janusz KOWAL
Janusz KOWAL
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza
Hutnicza
Podstawy Automatyki
Podstawy Automatyki
Wykład 2
Modelowanie matematyczne
układów dynamicznych
Wykład 2
Wykład 2
Modelowanie matematyczne
Modelowanie matematyczne
układów dynamicznych
układów dynamicznych
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
2
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
9
Wprowadzenie
9
Modele układów mechanicznych
9
Transmitancja operatorowa
9
Modele w przestrzeni stanów
9
Linearyzacja
9
Modele układów elektrycznych
9
Modele układów elektromechanicznych
9
Modele układów cieplnych i przepływowych
Plan wykładu:
Plan wykładu:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
3
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
9
9
Modelowanie
Modelowanie
jest matematycznym opisem zachowania
się elementów automatyki i obiektów regulacji,
niezbędnym do przeprowadzenia analizy i syntezy ich
działania
9
Tworząc model wykorzystujemy
prawa fizyczne
prawa fizyczne
rządzące
konkretnym układem (np. prawa Newtona, prawa
Kirchhoffa, równanie bilansu masy, zasadę zachowania
energii, itp.)
Model matematyczny obiektu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
4
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
9
Do opisu modelu najczęściej wykorzystuje się
równania
równania
różniczkowe
różniczkowe
9
Jeden układ może mieć
wiele
wiele
różnych modeli
matematycznych, w zależności od potrzeb badającego
i konkretnego zastosowania
9
Ważne jest zachowanie kompromisu pomiędzy prostotą
modelu a dokładnością wyników jego analizy
Model matematyczny obiektu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
5
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
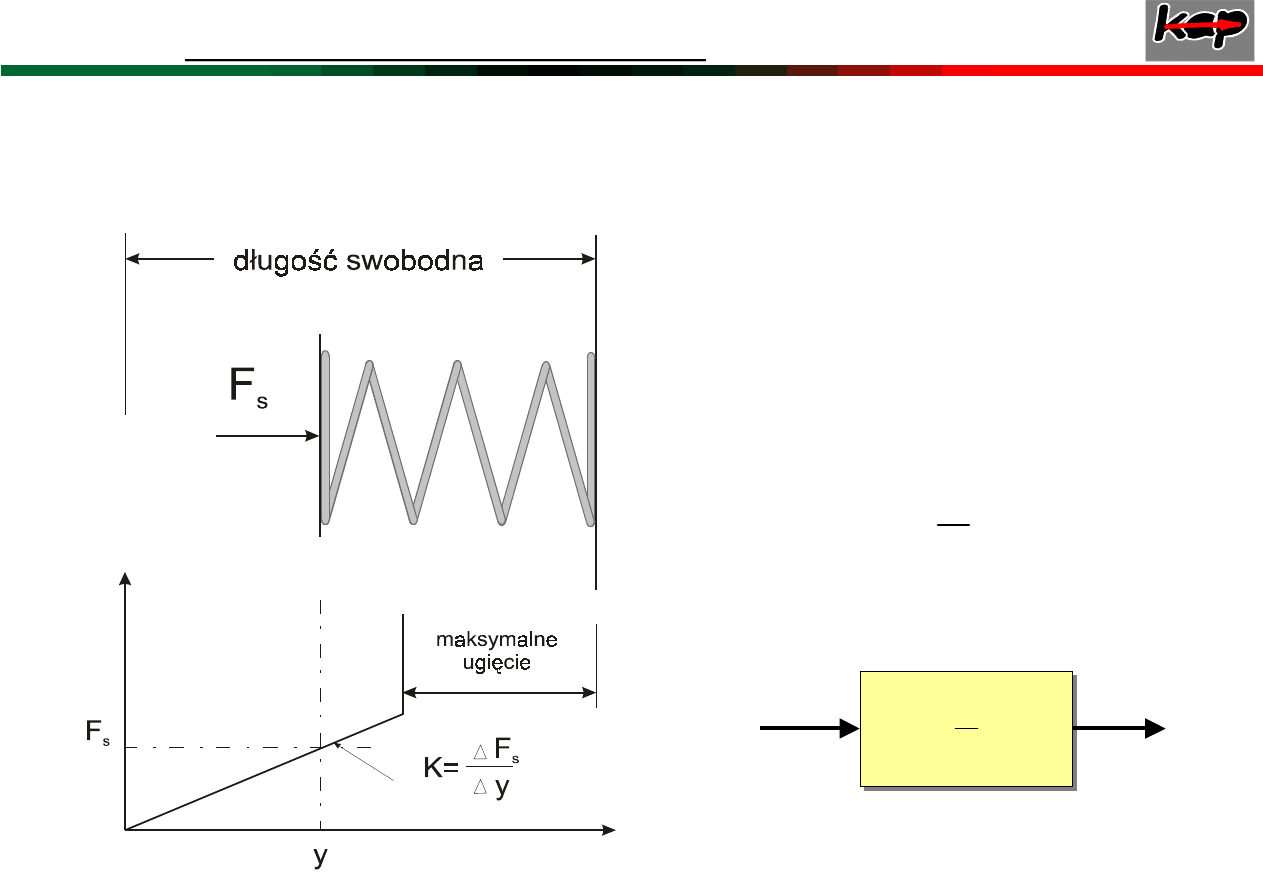
9
Sprężyna poddana działaniu siły F
s
y
k
F
S
⋅
=
S
F
k
y
1
=
Modelowanie układów mechanicznych
czyli
F
S
y
k
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
6
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
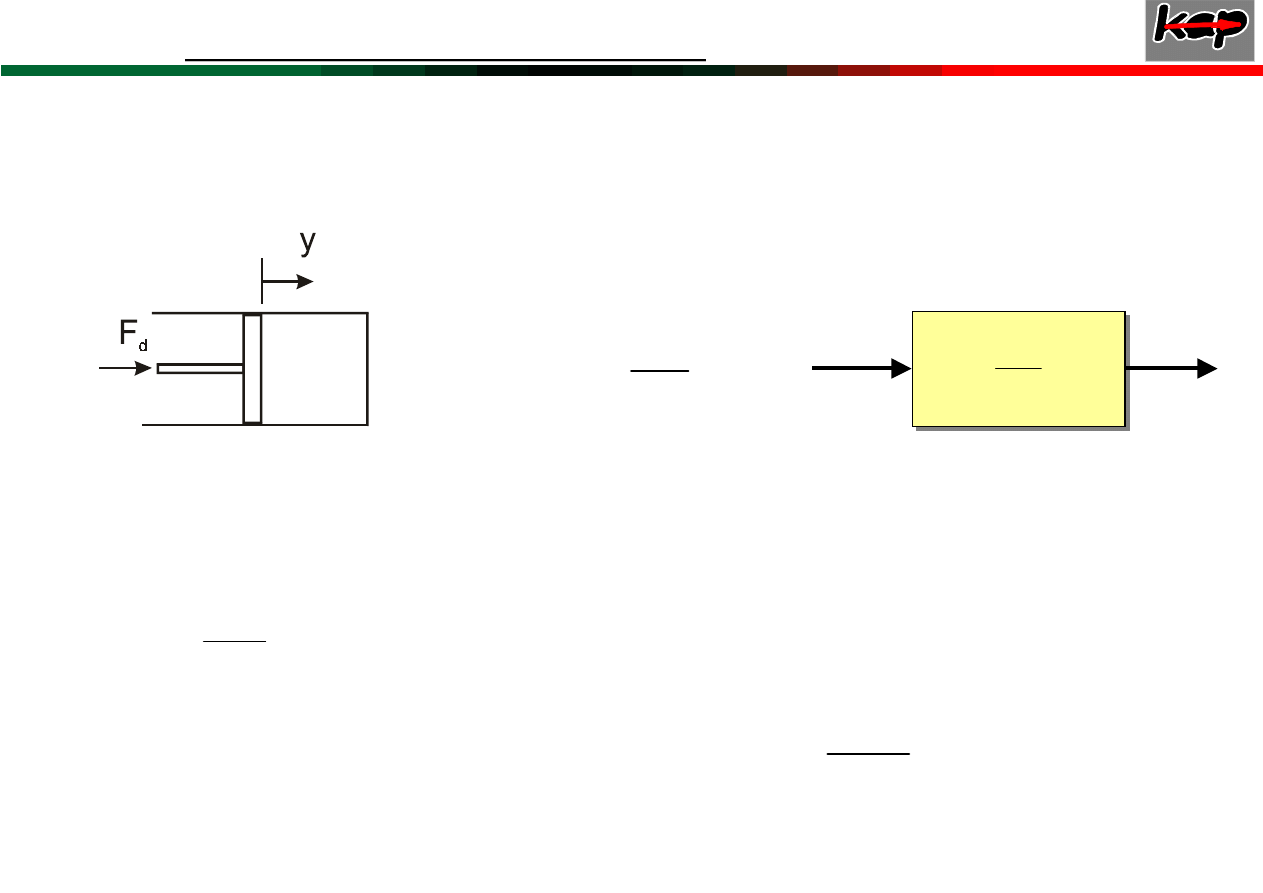
9
Tłumik hydrauliczny
wprowadzając operator różniczkowania D
dt
dy
c
F
d
=
cDy
F
d
=
d
F
cD
1
y
=
,...
2
,
1
,
=
=
n
dt
d
D
n
n
n
Modelowanie układów mechanicznych
otrzymamy
czyli
F
d
y
cD
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
7
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
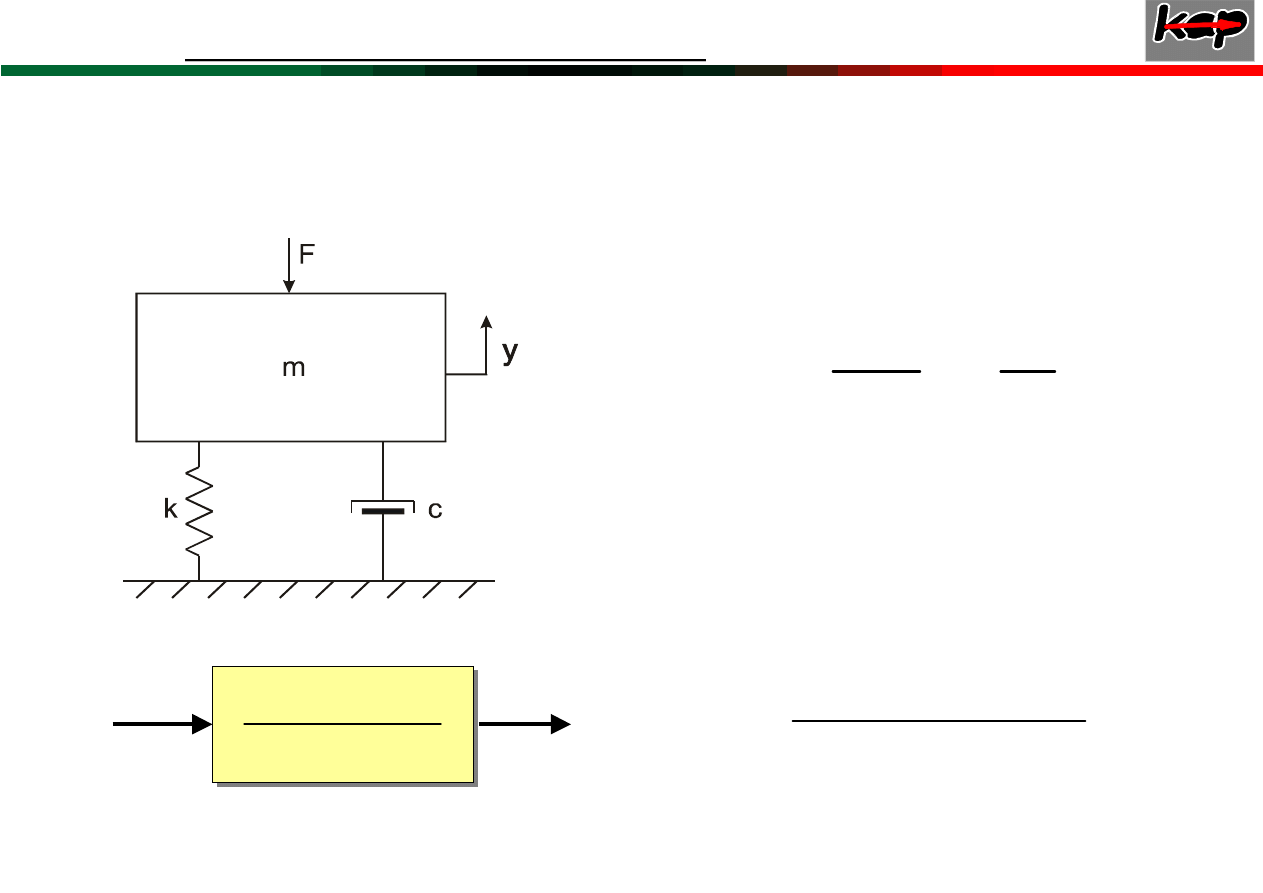
ky
dt
dy
c
dt
y
d
m
F
+
+
=
2
2
(
)
y
k
cD
mD
F
+
+
=
2
F
k
cD
mD
y
+
+
=
2
1
Modelowanie układów mechanicznych
9
Zespół masa-tłumik-sprężyna
F
y
k
cD
mD
+
+
2
1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
8
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
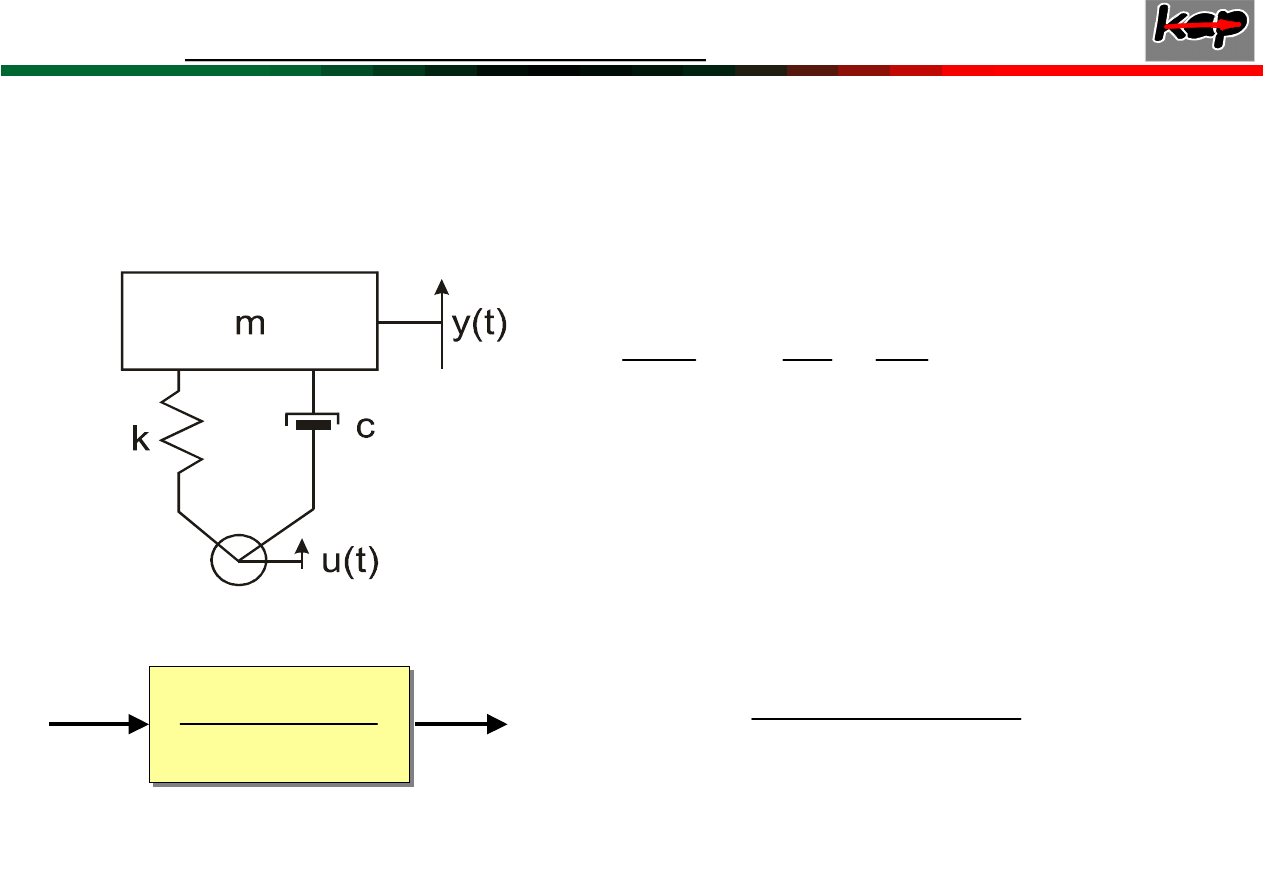
(
)
0
2
2
=
−
+
−
+
u
y
k
dt
du
dt
dy
c
dt
y
d
m
ku
cDu
ky
cDy
y
mD
+
=
+
+
2
u
k
cD
mD
k
cD
y
+
+
+
=
2
Modelowanie układów mechanicznych
9
Model zamocowania jednego koła pojazdu
u
y
k
cD
mD
k
cD
+
+
+
2
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
9
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Rozważmy liniowy, stacjonarny układ zdefiniowany przez
następujące równanie różniczkowe
)
(
...
...
)
(
0
1
0
1
s
X
a
s
a
s
a
b
s
b
s
b
s
Y
n
n
m
m
+
+
+
+
+
+
=
x
b
dt
x
d
b
dt
x
d
b
y
a
dt
y
d
a
dt
y
d
a
m
m
m
m
m
m
n
n
n
n
n
n
0
1
1
1
0
1
1
1
,...,
,...,
+
+
+
=
+
+
+
−
−
−
−
−
−
Transmitancja operatorowa
Dokonując przekształceń Laplace’a otrzymamy
gdzie n
≥
m
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
10
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Symbol graficzny elementu automatyki
)
(
)
(
...
...
)
(
0
1
1
1
0
1
1
1
s
X
s
Y
a
s
a
s
a
s
a
b
s
b
s
b
s
b
s
G
n
n
n
n
m
m
m
m
=
+
+
+
+
+
+
+
+
=
−
−
−
−
Transmitancja operatorowa
Transmitancja operatorowa G(s)
Transmitancja operatorowa G(s)
jest zdefiniowana jako
stosunek transformaty Laplace’a sygnału wyjściowego Y(s)
do transformaty Laplace’a sygnału wejściowego X(s), przy
założeniu, że wszystkie warunki początkowe są zerowe
G(s)
G(s)
G(s)
X(t)
Y(t)
)
(
)
(
)
(
s
X
s
Y
s
G
=
)
(
)
(
)
(
s
X
s
Y
s
G
=
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
11
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Elementy wielowymiarowe określa macierz transmitancji, na
przykład
( )
( )
( )
( )
( )
( )
( )
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
s
G
s
G
s
G
s
G
s
G
s
G
s
G
nm
n
m
m
1
2
1
12
11
- przy założeniu, że wszystkie
pozostałe wartości wejściowe i
warunki początkowe są równe
zero
( )
( )
( )
s
X
s
Y
s
G
k
i
ik
=
Transmitancja operatorowa
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
12
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
9
Transmitancja układu automatyki jest jego modelem
matematycznym
9
Transmitancja jest własnością samego układu, niezależną
od wielkości i natury sygnału wejściowego
9
Transmitancja przedstawia związki pomiędzy sygnałami
wyjściowym i wejściowym, nie dostarcza natomiast żadnej
informacji dotyczącej fizycznej struktury układu
9
Transmitancje wielu fizycznie różnych układów mogą być
identyczne
Własności transmitancji
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
13
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
9
Jeśli transmitancja układu jest znana, to możemy określić
sygnał wyjściowy dla różnych sygnałów wejściowych
9
Raz określona transmitancja daje pełny opis charakterystyk
dynamicznych układu, w odróżnieniu od jego opisu
fizycznego
9
Postać transmitancji operatorowej stanowi kryterium
klasyfikacji elementów automatyki
Właściwości transmitancji
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
14
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Modelowanie w przestrzeni stanów
9
9
Stan uk
Stan uk
ł
ł
adu dynamicznego
adu dynamicznego
to najmniejszy zbiór
zmiennych
zmiennych
stanu
stanu
takich, że ich znajomość w chwili t = t
0
,
wraz ze znajomością sygnału wejściowego u(t) dla t
≥
t
0
w pełni określa zachowanie układu w każdej chwili t
≥
t
0
,
9
9
Wektor stanu
Wektor stanu
określa jednoznacznie stan x(t) układu
w każdej chwili t
≥
t
0
, gdy tylko stan przy t=t
0
jest dany
i określony jest sygnał wejściowy u(t) dla t
≥
t
0 ,
9
9
Przestrze
Przestrze
ń
ń
stan
stan
ó
ó
w
w
to n-wymiarowa przestrzeń, w której
każdy stan może być przedstawiony przez punkt w tej
przestrzeni.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
15
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Dynamika układu
Stan x(t)
Dynamika układu
Dynamika układu
Stan
x(t)
Wejście
u(t)
Wyjście
y(t)
Warunki
początkowe
x(0)
Dynamika układu
W układach fizycznych zmiennymi stanu
x(t)
są takie wielkości
fizyczne jak: napięcie, prąd, prędkość, pozycja, temperatura,
ciśnienie, itp.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
16
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
9
Liczba zmiennych stanu, które w pełni określają własności
dynamiczne układu jest równa liczbie elementów, które są
zdolne magazynować energię w układzie (np. sprężyna,
tłumik, pojemność, indukcyjność) lub rzędowi równania
różniczkowego opisującego wspomniany układ,
9
Stosując metodę zmiennych stanu można przedstawić
równanie różniczkowe n-tego rzędu (opisujące model
układu) jako n równań różniczkowych pierwszego rzędu
Własności metody zmiennych stanu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
17
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Równania przestrzeni stanów
układ dynamiczny może być opisany równaniami
różniczkowymi
( )
(
)
( )
(
)
( )
(
)
t
u
u
u
x
x
x
f
t
x
t
u
u
u
x
x
x
f
t
x
t
u
u
u
x
x
x
f
t
x
r
n
n
n
r
n
r
n
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
2
1
2
1
2
1
2
1
2
2
2
1
2
1
1
1
K
K
&
K
K
&
K
K
&
=
⋅
⋅
⋅
=
=
Zakładając, że
u
1
(t),u
2
(t),...,u
r
(t) – sygnały wejściowe
y
1
(t),y
2
(t),...,y
m
(t) – sygnały wyjściowe
x
1
(t),x
2
(t),...,x
n
(t) – zmienne stanu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
18
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Sygnały wyjściowe
( )
( )
( )
( )
(
)
(
)
(
)
(
)
⋅
⋅
⋅
=
⋅
⋅
⋅
=
t
u
u
u
x
x
x
f
t
u
u
u
x
x
x
f
t
u
u
u
x
x
x
f
t
,
t
x
t
x
t
x
t
r
n
n
r
n
r
n
n
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
,
,
2
1
2
1
2
1
2
1
2
2
1
2
1
1
2
1
K
K
K
K
K
K
u
x
f
x
( )
(
)
( )
(
)
( )
(
)
t
;
u
,
,
u
,
u
;
x
,
,
x
,
x
g
t
y
t
;
u
,
,
u
,
u
;
x
,
,
x
,
x
g
t
y
t
;
u
,
,
u
,
u
;
x
,
,
x
,
x
g
t
y
r
n
m
m
r
n
r
n
K
K
K
K
K
K
2
1
2
1
2
1
2
1
2
2
2
1
2
1
1
1
=
⋅
⋅
⋅
=
=
Równania przestrzeni stanów
Definiując
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
19
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
( )
( )
( )
( )
(
)
(
)
(
)
(
)
( )
( )
( )
( )
⋅
⋅
⋅
=
⋅
⋅
⋅
=
⋅
⋅
⋅
=
t
u
t
u
t
u
t
t
u
u
u
x
x
x
g
t
u
u
u
x
x
x
g
t
u
u
u
x
x
x
g
t
t
y
t
y
t
y
t
r
r
n
m
r
n
r
n
m
2
1
2
1
2
1
2
1
2
1
2
2
1
2
1
1
2
1
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
;
,
,
,
,
,
,
u
u
x
g
y
K
K
K
K
K
K
równania przybierają postać
oraz
–
r
r
ó
ó
wnanie stan
wnanie stan
ó
ó
w
w
–
r
r
ó
ó
wnanie wyj
wnanie wyj
ść
ść
( )
(
)
t
t
,
, u
x
f
x
=
&
( )
(
)
t
t
,
, u
x
g
y
=
Równania przestrzeni stanów
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
20
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Po linearyzacji wokół wybranego punktu pracy, równania te
można zapisać w postaci
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
( )
+
=
+
=
t
u
t
u
t
u
d
d
d
d
t
x
t
x
t
x
c
c
c
c
c
c
c
c
c
t
y
t
y
t
y
t
u
t
u
t
u
b
b
b
b
t
x
t
x
t
x
a
a
a
a
a
a
a
a
a
t
x
t
x
t
x
r
mr
m
r
n
mn
n
m
m
m
m
r
nr
n
r
n
nn
n
n
n
n
n
M
L
M
M
L
M
L
M
M
L
L
M
M
L
M
M
L
M
L
M
M
L
L
&
M
&
&
2
1
1
1
11
2
1
2
1
2
22
21
1
12
11
2
1
2
1
1
1
11
2
1
2
1
2
22
21
1
12
11
2
1
Równania przestrzeni stanów
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
21
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Dla układu niestacjonarnego
Dla układu niestacjonarnego
Zlinearyzowana postać równania stanów i równania wyjść w
postaci wektorowo-macierzowej jest następująca
( )
( )
( )
( )
( )
( )
+
=
+
=
t
t
t
t
t
t
Du
Cx
y
Bu
Ax
x&
Równania przestrzeni stanów
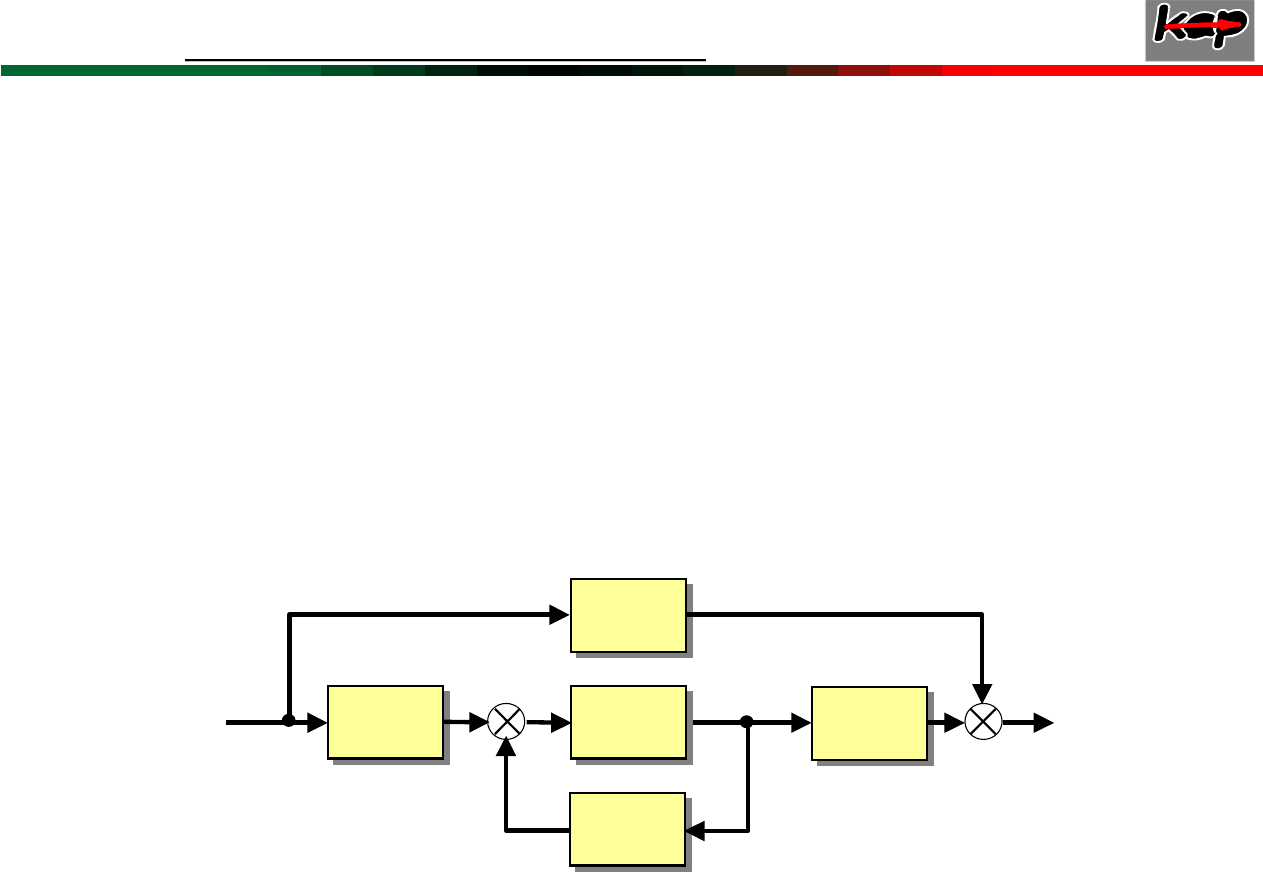
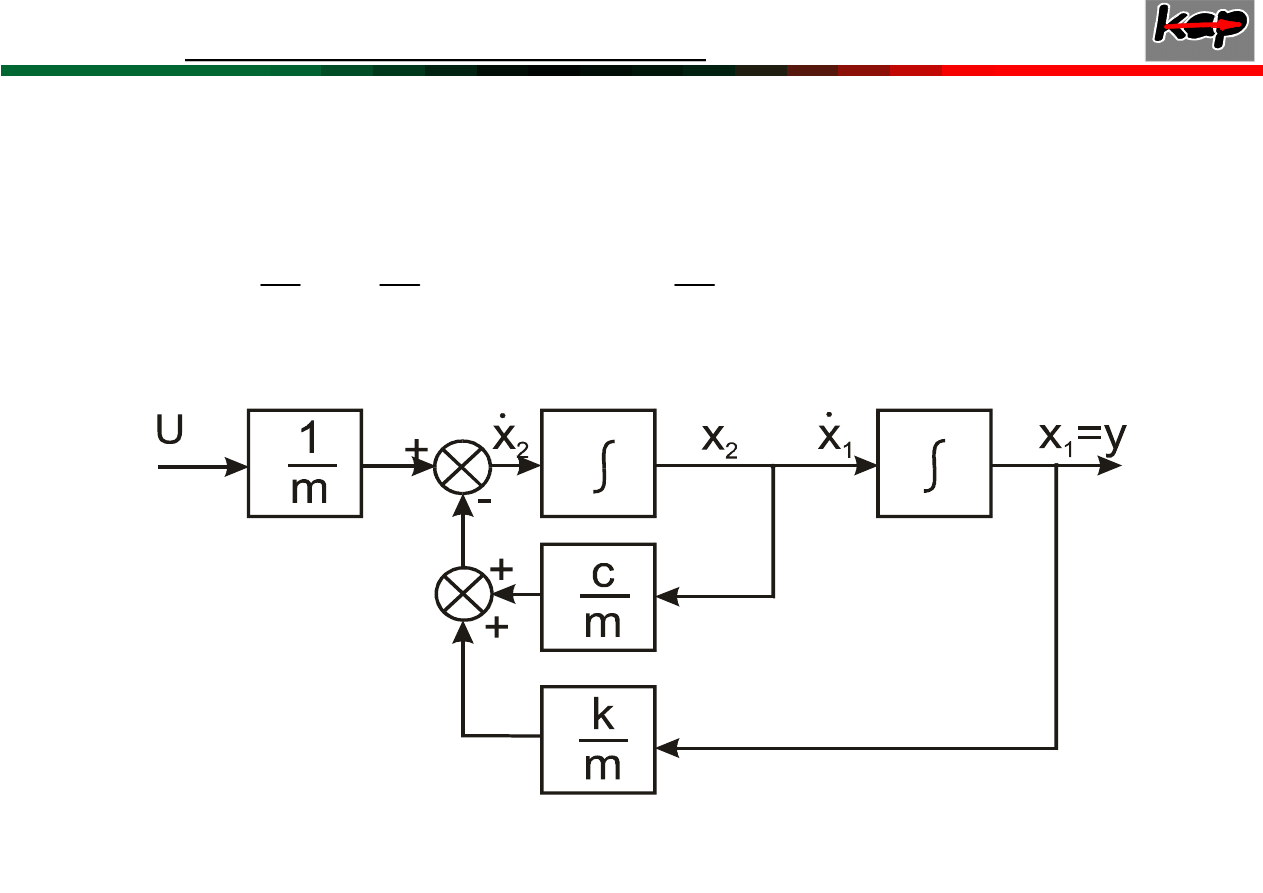
Schemat blokowy liniowego układu sterowania w przestrzeni
stanów
u
u
(
(
t
t
)
)
x
x
(
(
t
t
)
)
+
+
+
+
.
D(t)
D(t)
D(t)
B(t)
B(t)
B(t)
A(t)
A(t)
A(t)
C(t)
C(t)
C(t)
∫
dt
∫
∫
dt
dt
y(t)
x(t)
u(t)
x(t)
.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
22
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Dla uk
Dla uk
ł
ł
adu stacjonarnego
adu stacjonarnego
( )
( )
( )
( )
( )
( )
+
=
+
=
t
t
t
t
t
t
Du
Cx
y
Bu
Ax
x&
Równania przestrzeni stanów
gdzie:
A
–
macierz stanu n×n
B
–
macierz wejścia (sterowania) n×r
C
–
macierz wyjścia (odpowiedzi) m×n
D
–
bezpośrednia macierz transmisji m×r
n – ilość stanów, r – ilość wejść, m – ilość wyjść
x(t)
–
wektor stanu, u(t)
–
wektor wejść, y(t)
–
wektor wyjść
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
23
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
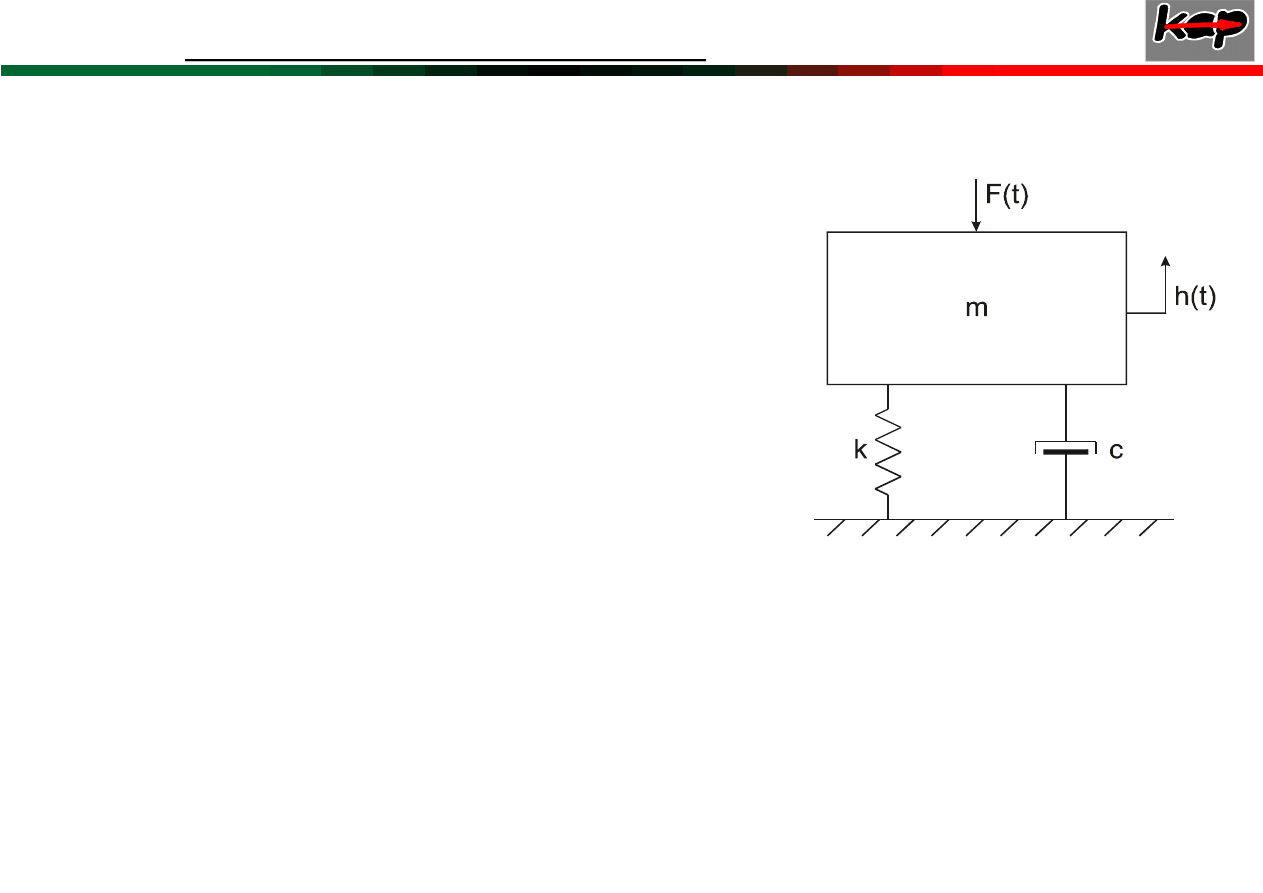
Przykład 1. Układ wibroizolacji
F(t) – wejście (siła zewnętrzna)
h(t) – wyjście (przemieszczenie masy)
( )
( )
( )
( )
t
F
t
kh
t
h
c
t
h
m
=
+
+ &
&&
( )
( )
=
=
=
1
2
1
x
t
h
x
t
h
x
&
&
– zmienne stanu
F(t)
u =
– zmienna wejściowa
Zamiana zmiennych
– zmienna wyjściowa
h(t)
y
=
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
24
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
+
−
−
=
=
u
m
x
m
c
x
m
k
x
x
x
1
2
1
2
2
1
&
&
Równanie wyjść ma
postać
1
x
y
=
( )
( )
h(t)
m
k
(t)
h
m
c
t
F
m
1
t
h
−
−
=
&
&&
Zastępujemy równanie różniczkowe drugiego rzędu układem
dwóch równań pierwszego rzędu
u
m
x
x
m
c
m
k
x
x
+
−
−
=
1
0
1
0
2
1
2
1
&
&
[
]
=
2
1
0
1
x
x
y
W postaci wektorowo-macierzowej równania stanów i wyjść
mogą być zapisane jako
Przykład 1. Układ wibroizolacji
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
25
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Schemat blokowy układu wibroizolacji
−
−
=
m
c
m
k
A
1
0
[
]
0
1
=
C
=
m
B
1
0
Przykład 1. Układ wibroizolacji
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
26
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Zależność pomiędzy równaniami stanu i wyjścia
a transmitancją operatorową, dla układu z jednym wejściem
i jednym wyjściem
[
]
BU(s)
A
sI
X(s)
1
−
−
=
+
=
+
=
)
(
)
(
)
(
)
(
)
(
)
(
s
DU
s
CX
s
Y
s
BU
s
AX
s
sX
[
]
DU(s)
BU(s)
A
sI
C
Y(s)
+
−
=
−1
Przekształcając
Równania stanu
⇔
Transmitancja
( )
[
]
D
B
A
sI
C
U(s)
Y(s)
s
G
+
−
=
=
−1
( )
[
]
D
B
A
sI
C
U(s)
Y(s)
s
G
+
−
=
=
−1
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
27
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Linearyzacja
9
Model matematyczny układu jest zawsze przybliżeniem
rzeczywistego charakteru zjawisk fizycznych w nim
zachodzących,
9
Równania otrzymane w modelu najczęściej są równaniami
nieliniowymi,
9
Ze względu na łatwość analizy dąży się do zastąpienia
równań nieliniowych równaniami liniowymi,
9
9
Linearyzacja
Linearyzacja
jest procesem tworzenia modelu liniowego,
który aproksymuje model nieliniowy.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
28
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
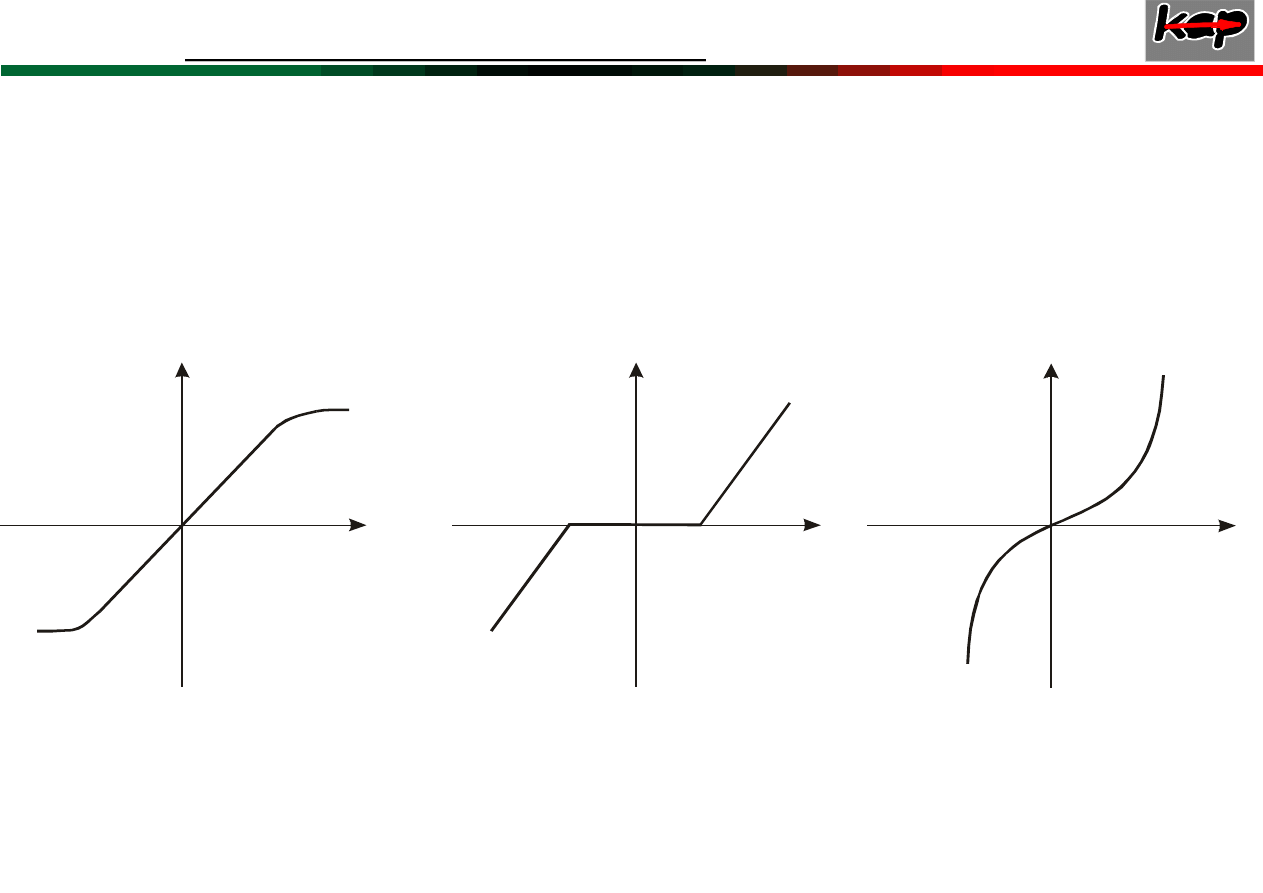
Charakterystyki statyczne elementów nieliniowych
wy
we
wy
we
wy
Strefa nieczułości
Nasycenie
Nieliniowość kwadratowa
we
Linearyzacja
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
29
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
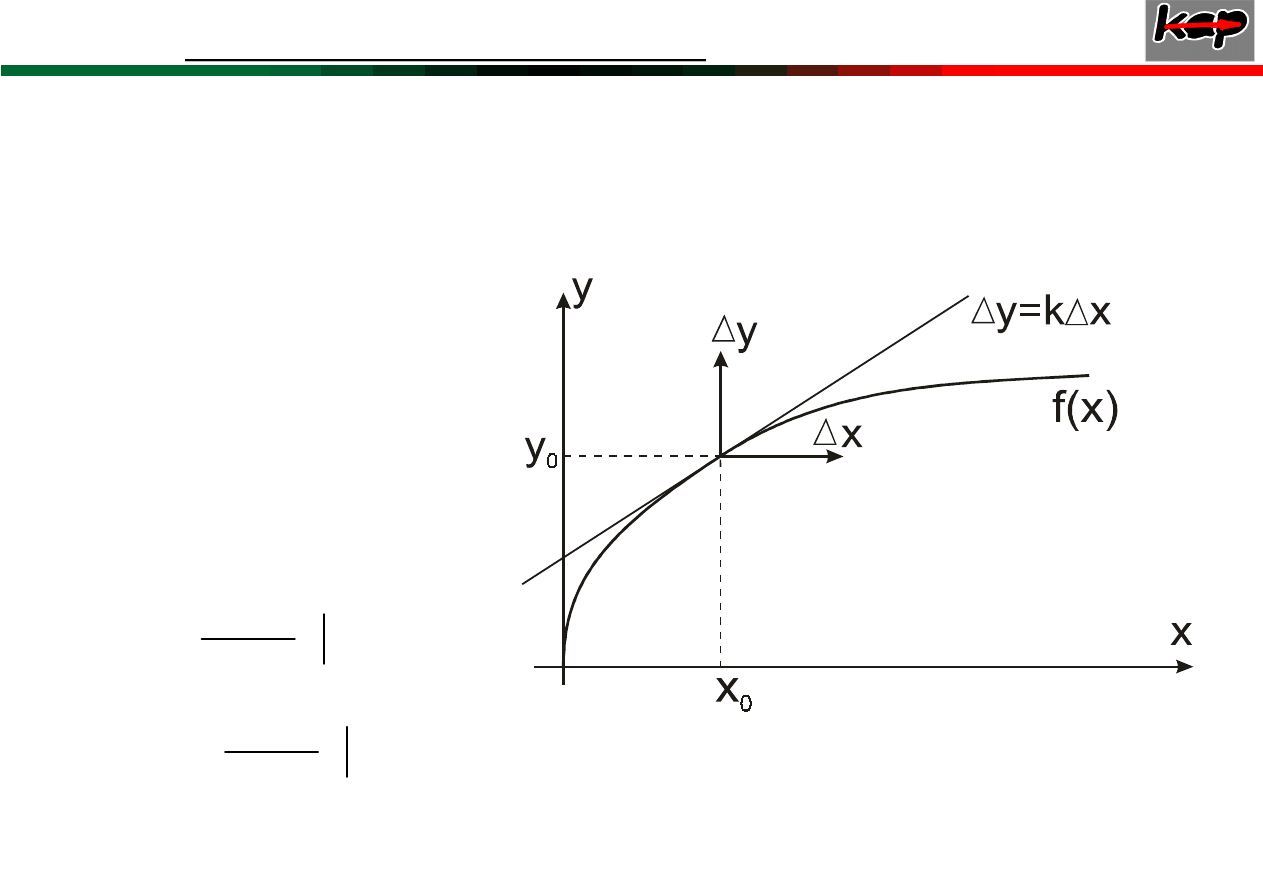
Linearyzacja statyczna polega na:
9
przeniesieniu układu współrzędnych do punktu pracy,
9
zastąpieniu sygnałów w opisie matematycznym
odchyleniami tych wartości w punkcie pracy,
9
zastąpieniu krzywej, reprezentującej zależności y od x,
styczną do niej w punkcie pracy.
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
30
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Niech y = f (x)
0
0
y
y
y
x
x
x
−
=
−
=
∆
∆
( )
( )
x
dx
x
df
y
dx
x
df
k
x
k
y
x
x
x
x
∆
=
∆
=
∆
=
∆
=
=
0
0
Linearyzacja statyczna
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
31
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
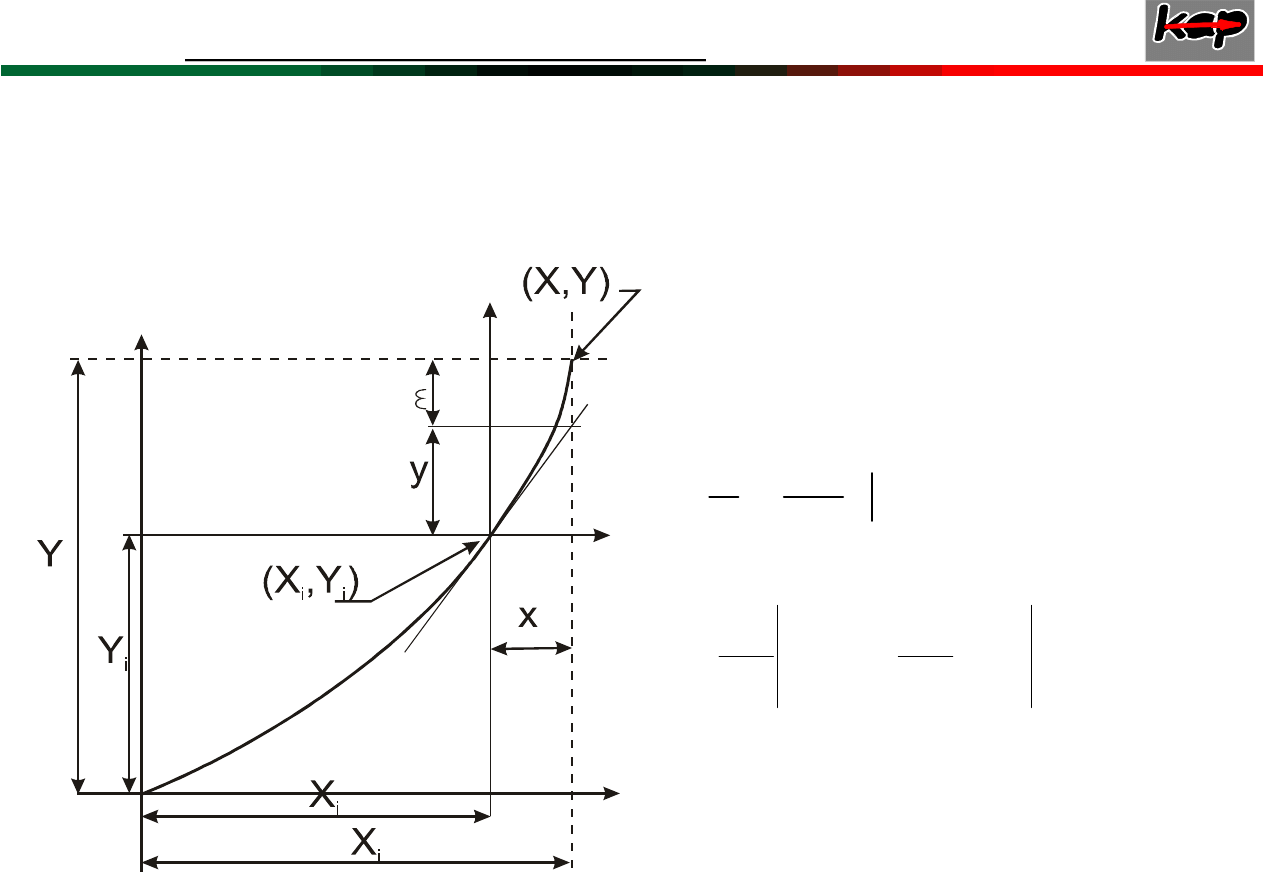
Przykład 2. Linearyzacja funkcji y = x
2
y
Y
y
Y
Y
i
i
+
≈
+
+
=
ε
x
X
Y
Y
i
i
2
+
≈
( )
x
X
x
X
dX
d
x
dX
dY
y
i
i
y
i
x
i
y
i
x
2
)
,
(
)
,
(
2
=
=
=
)
(
, i
i
y
x
dX
dY
x
y =
- nachylenie w
punkcie (X
i
, Y
i
),
Wybieramy punkt pracy (X
i
, Y
i
) i rysujemy styczną do krzywej
w tym punkcie.
Y
X
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
32
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Linearyzacja dynamiczna
Linearyzacja dynamiczna polega na rozwinięciu nieliniowych
funkcji w
szereg
szereg
Taylora
Taylora
w otoczeniu punktu pracy.
( )
( )
0
=
)
u
,
,
u
,
u
,
y
,
,
y
,
y
(
F
m
n
K
&
K
&
(
)
( )
(
)
( )
0
0
0
0
0
,
,
=
+
∆
∂
∂
+
+
∆
∂
∂
+
n
m
u
y
m
u
y
R
u
u
F
u
u
F
K
( )
( )
(
)
(
)
(
)
(
)
( )
(
)
( )
+
∂
∂
+
+
∂
∂
+
+
∂
∂
+
=
n
u
,
y
n
u
,
y
u
,
y
0
0
m
n
∆y
y
F
y
∆
y
F
∆y
y
F
u
,
y
F
u
,
u,
,
y
,
y,
F
0
0
0
0
0
0
K
&
&
K
K
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
33
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Można przyjąć R
n
= 0 dla niewielkich przyrostów
( )
( )
( )
u
b
u
b
u
b
y
a
y
a
y
a
y
a
m
m
n
n
n
n
∆
+
∆
+
+
∆
=
∆
+
∆
+
+
∆
+
∆
−
−
0
1
0
1
1
1
&
K
&
K
(
)
(
)
( )
(
)
( )
(
)
( )
(
)
( )
0
∆u
u
F
∆u
u
F
∆y
y
F
y
∆
y
F
∆y
y
F
m
u
,
y
m
u
,
y
n
u
,
y
n
u
,
y
u
,
y
0
0
0
0
0
0
0
0
0
0
=
∂
∂
+
+
∂
∂
+
+
∂
∂
+
+
∂
∂
+
∂
∂
K
K
&
&
Linearyzacja dynamiczna
Dla układu stacjonarnego w punkcie pracy odpowiadającym
stanowi równowagi, pochodne cząstkowe występujące w
równaniu są stałe
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
34
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
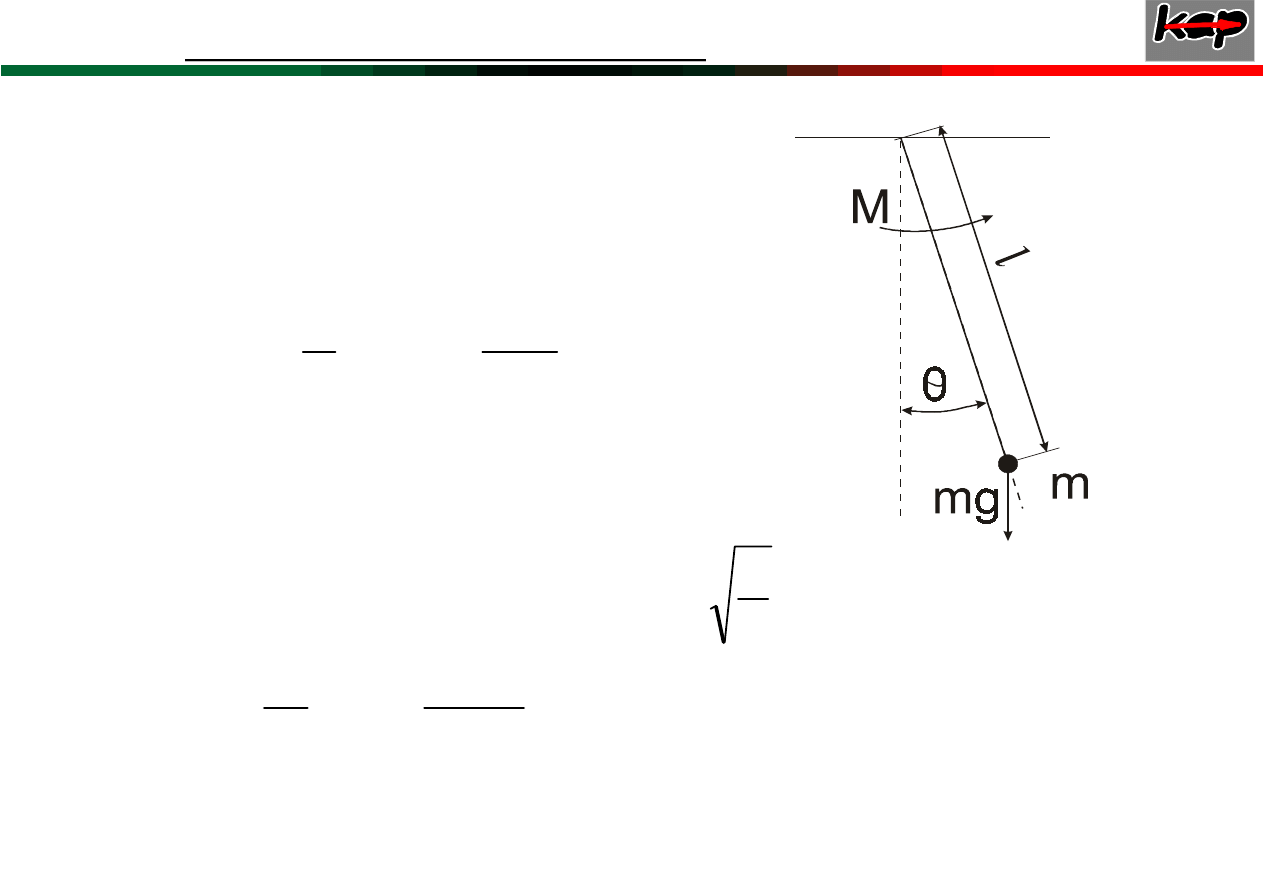
Przykład 3. Wahadło proste
M
Θ
mgl
Θ
I
=
+
sin
&&
2
sin
ml
M
Θ
l
g
Θ
=
+
&&
2
ml
M
Θ
l
g
Θ
=
+
&&
Zakładając, że dla małych kątów
sin
Θ≈Θ
l
g
=
ω
-
częstości drgań własnych
2
ml
I
=
-
moment bezwładności
względem osi obrotu
M -
przyłożony moment
zewnętrzny
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
35
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
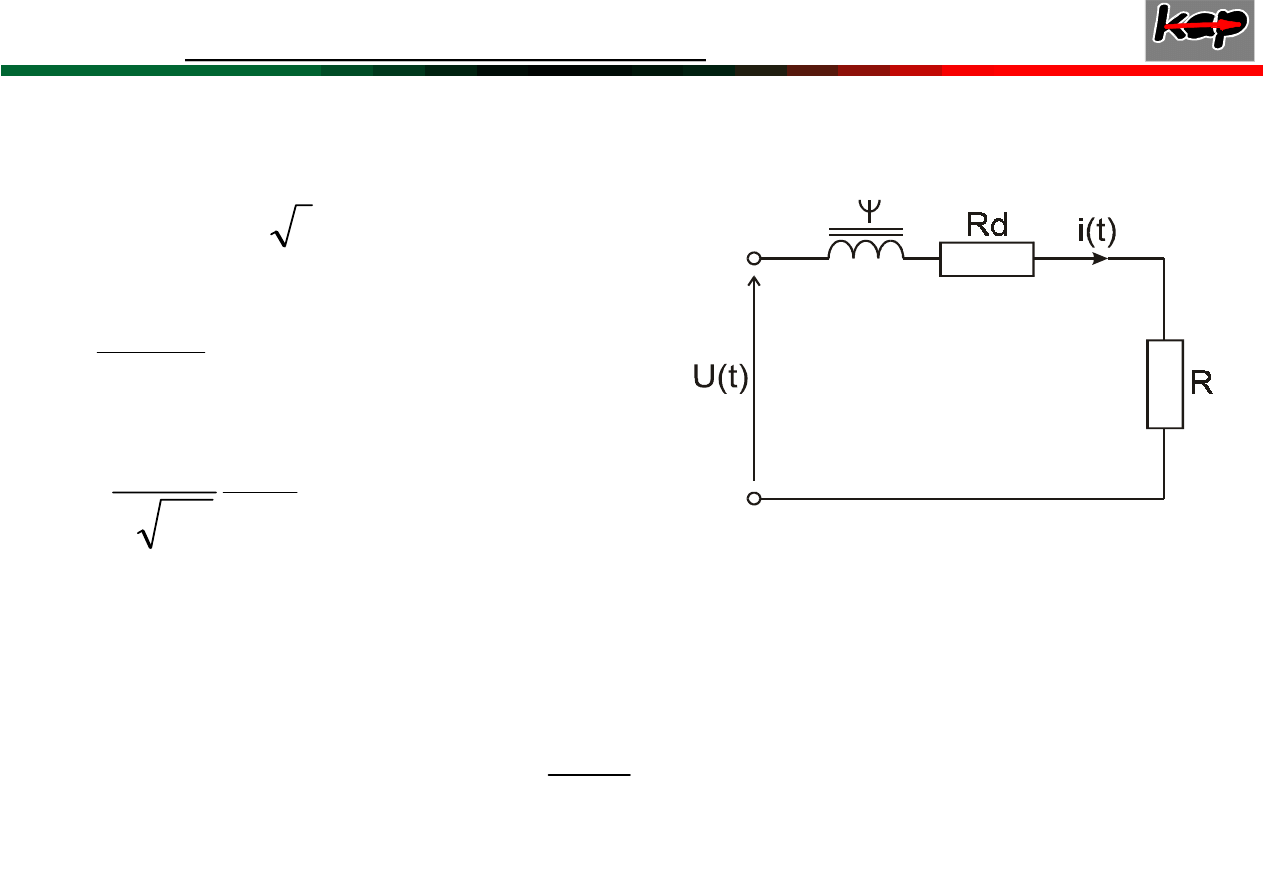
Przykład 4. Obwód elektryczny: rezystor + cewka z rdzeniem
( )
const
k
i
k
i
Ψ
=
⋅
=
,
( )
t
u
t
i
R
R
dt
t
dΨ
d
=
+
+
)
(
)
(
)
(
( )
( ) (
) ( ) ( )
t
u
t
i
R
R
dt
t
di
t
i
k
d
=
+
+
2
( ) ( ) ( )
0
,
,
=
t
u
dt
t
di
t
i
F
Powyższe równanie nieliniowe zapisujemy w postaci ogólnej
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
36
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Przyjmujemy punkt pracy ustalonej przy napięciu u
0
i prądzie i
0
(
)
d
i
u
R
R
i
F
+
=
∂
∂
0
0
,
(
)
0
,
2
0
0
i
k
dt
di
F
i
u
=
∂
∂
(
)
1
0
0
,
−
=
∂
∂
i
u
u
F
(
)
(
)
(
)
0
0
0
0
0
0
0
,
,
,
=
∆
∂
∂
+
∆
∂
∂
+
∆
∂
∂
u
u
F
dt
di
dt
di
F
i
i
F
i
u
i
u
i
u
(
)
u
dt
di
i
k
i
R
R
d
∆
=
∆
+
∆
+
0
2
Przyjmując
oraz
otrzymujemy liniowe równanie
różniczkowe
i
i
=
∆
u
u
=
∆
(
)
u
i
R
R
dt
di
i
k
d
=
+
+
⋅
0
2
Po podstawieniu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
37
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
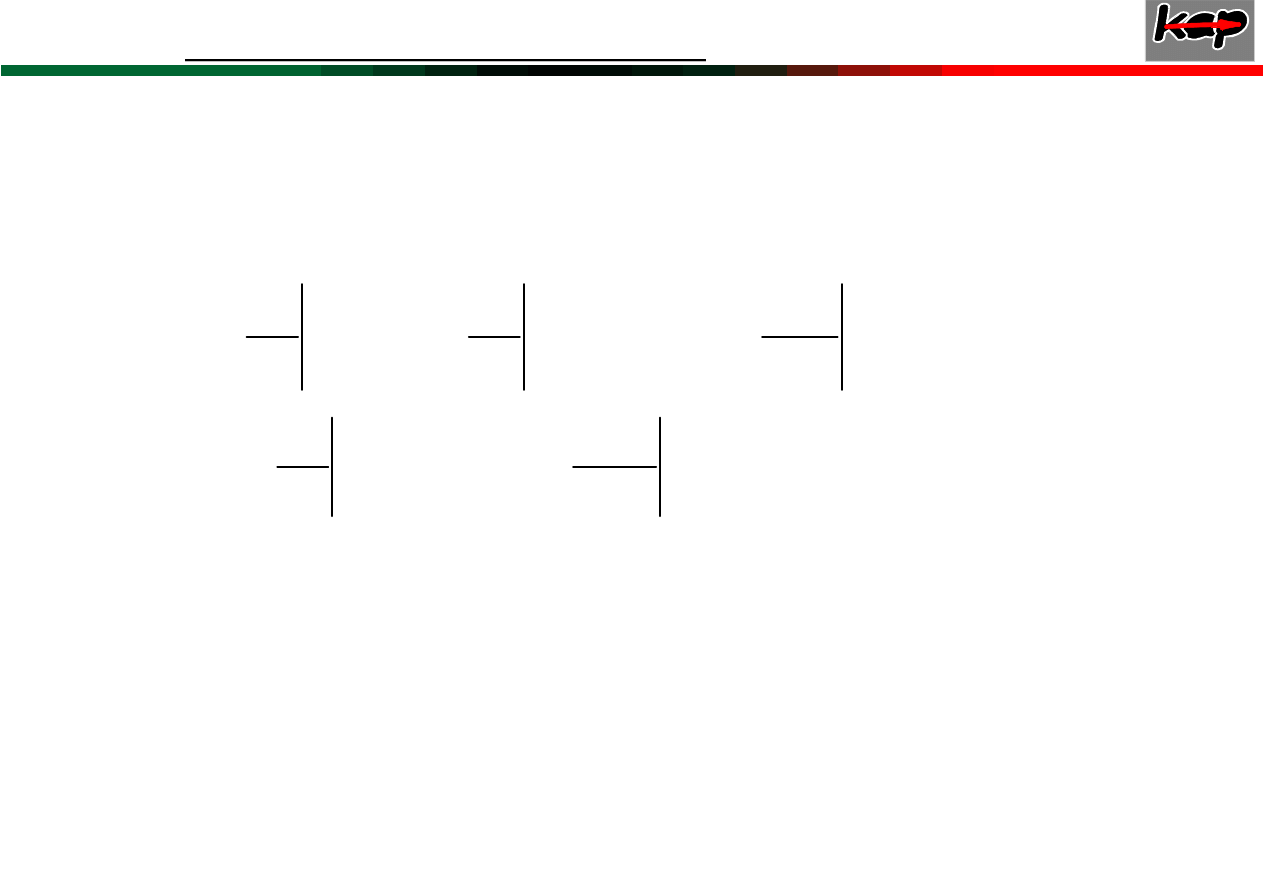
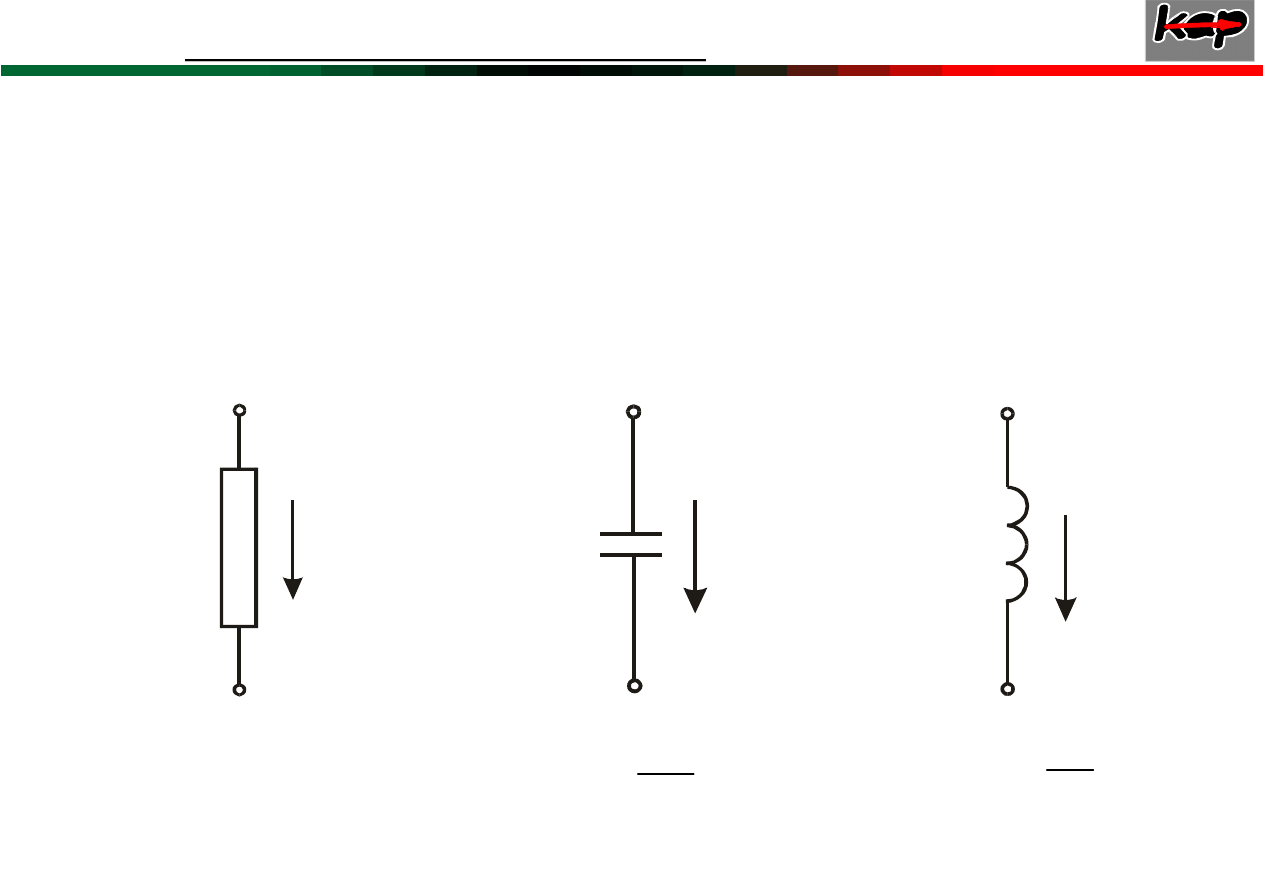
Modele układów elektrycznych
Modele układów elektrycznych budujemy przede wszystkim w
oparciu o prawo Ohma i prawa Kirchhoffa.
dt
du
C
i
=
9
Rezystor
i
R
u
⋅
=
dt
di
L
u
=
9
Pojemność
9
Indukcyjność
L
i
C
i
R
i
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
38
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
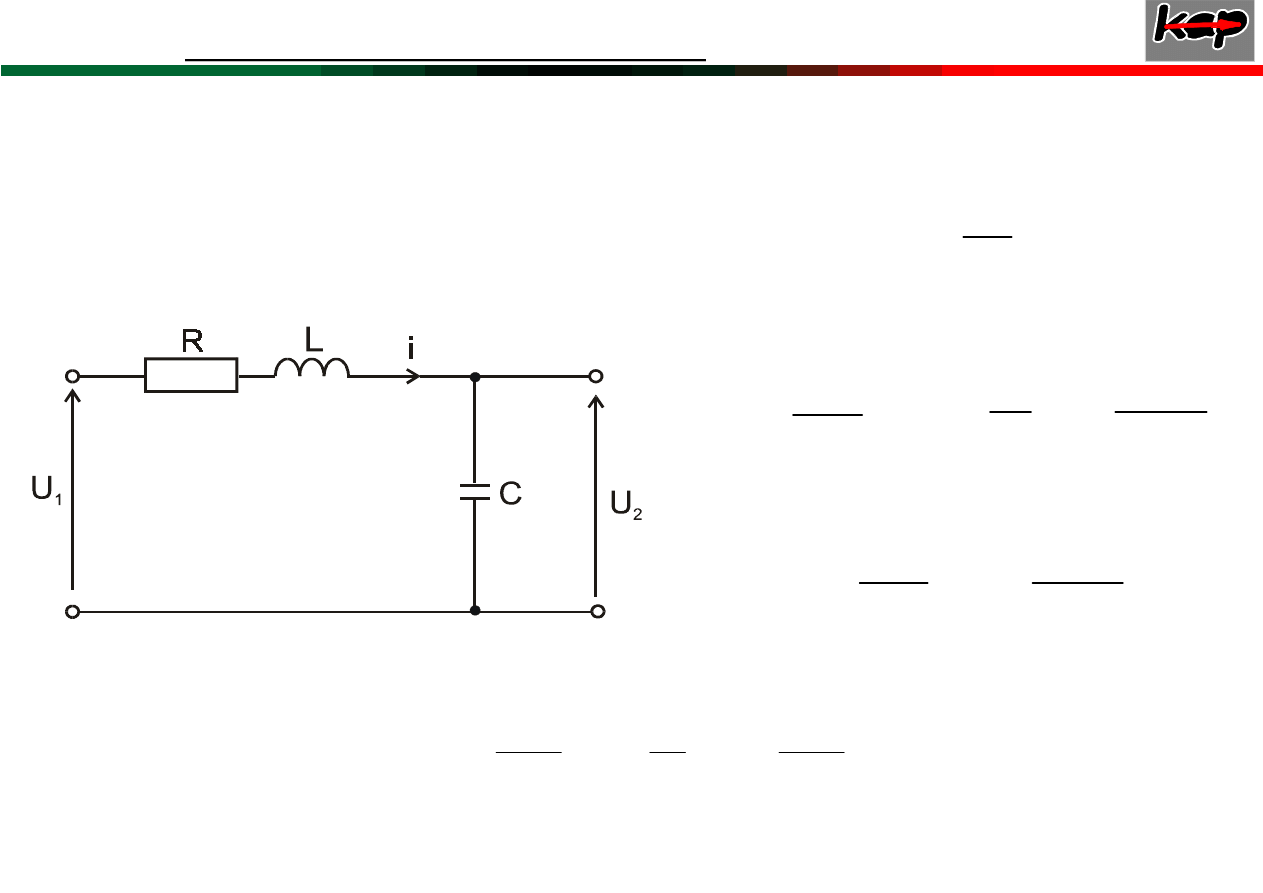
2
1
u
dt
di
L
Ri
u
+
+
=
dt
du
C
i
2
=
2
2
2
dt
u
d
C
dt
di =
2
2
2
2
2
1
u
dt
u
d
LC
dt
du
RC
u
+
+
=
2
2
1
2
1
1
u
LC
u
L
R
u
LC
u
−
−
=
&
&&
Stosujemy II prawo Kirchhoffa
Przykład 5. Obwód elektryczny RLC
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
39
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
=
=
=
1
2
2
2
1
x
u
x
u
x
&
&
−
−
=
=
1
2
2
2
1
1
1
x
LC
x
L
R
u
LC
x
x
x
&
&
u
LC
x
x
L
R
LC
x
x
+
−
−
=
1
0
1
1
0
2
1
2
1
&
&
[
]
=
2
1
0
1
x
x
y
2
0
0
2
2
0
2
)
(
ω
ξω
ω
+
+
=
s
s
k
s
G
Równanie stanu i równanie wyjścia
Transmitancja operatorowa
L
C
R
LC
k
2
1
,
1
0
=
=
=
ξ
ω
Przykład 5. Obwód elektryczny RLC
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
40
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
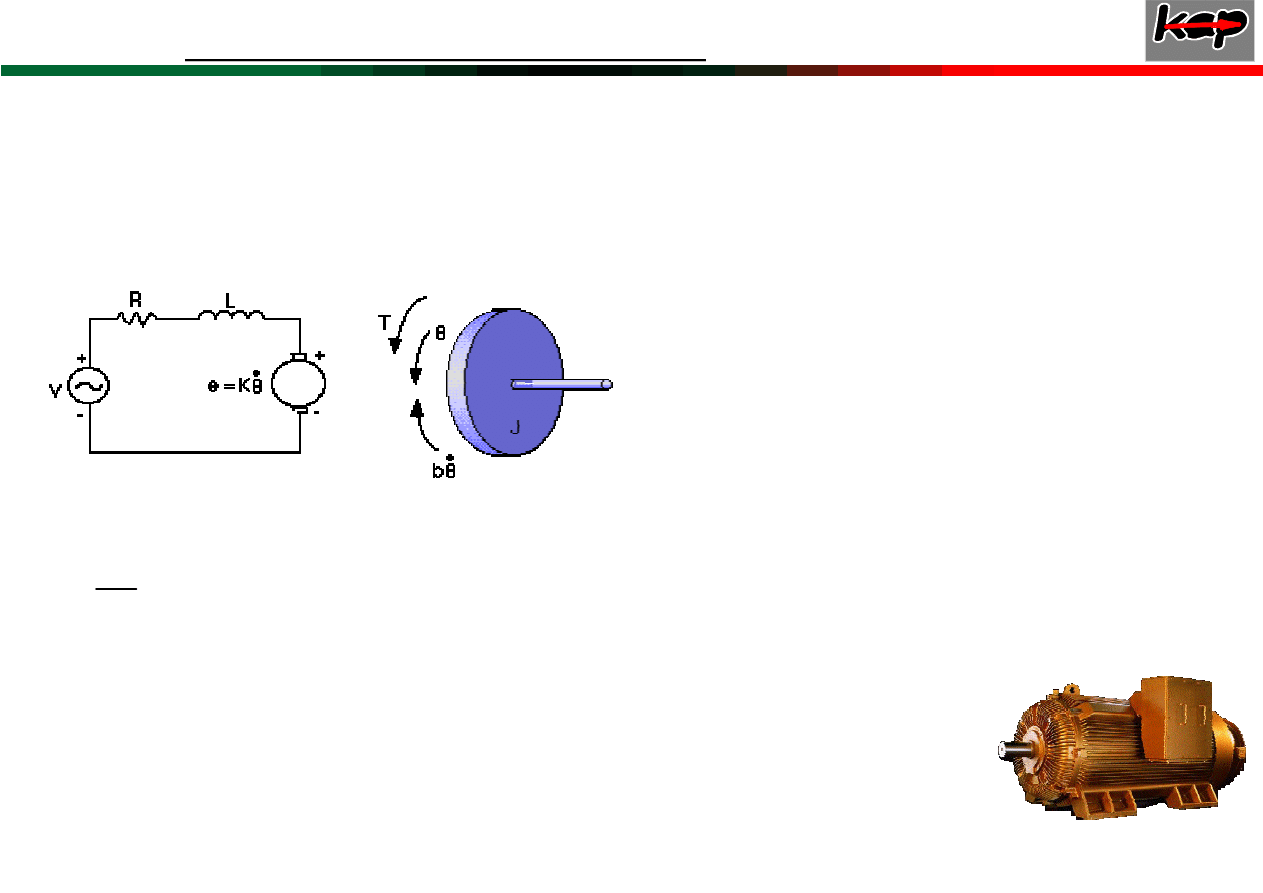
Modele układów elektromechanicznych
Przykład 6. Silnik prądu stałego sterowany od strony wirnika
V - napięcie zasilające (we)
θ
- położenie kątowe wału silnika (wy)
J - moment bezwładności
b – współczynnik tarcia lepkiego
=
=
=
+
−
=
+
i
k
T
k
e
T
b
J
e
V
Ri
dt
di
L
1
2
θ
θ
θ
&
&
&&
- równanie dynamiki wału silnika
- równanie spadków napięć w obwodzie wirnika
- siła elektromotoryczna
- moment mechaniczny silnika
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
41
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
transmitancja
Js)
sL)(b
(R
k
k
k
V(s)
(s)
G(s)
1
2
1
+
+
+
=
Ω
=
=
+
−
=
+
i
k
b
J
k
V
Ri
dt
di
L
1
2
θ
θ
θ
&
&&
&
- model silnika prądu stałego
Dla , gdzie
ω
- prędkość kątowa wału silnika
θ
ω
&
=
u
L
x
x
L
R
L
k
J
k
J
b
x
x
1
0
2
1
2
1
2
1
+
−
−
−
=
&
&
[
]
=
2
1
0
1
x
x
y
Równanie stanu i wyjścia dla zmiennych stanu
i
x
x
=
=
2
1
,
ω
Przykład 6. Silnik prądu stałego sterowany od strony wirnika
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
42
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
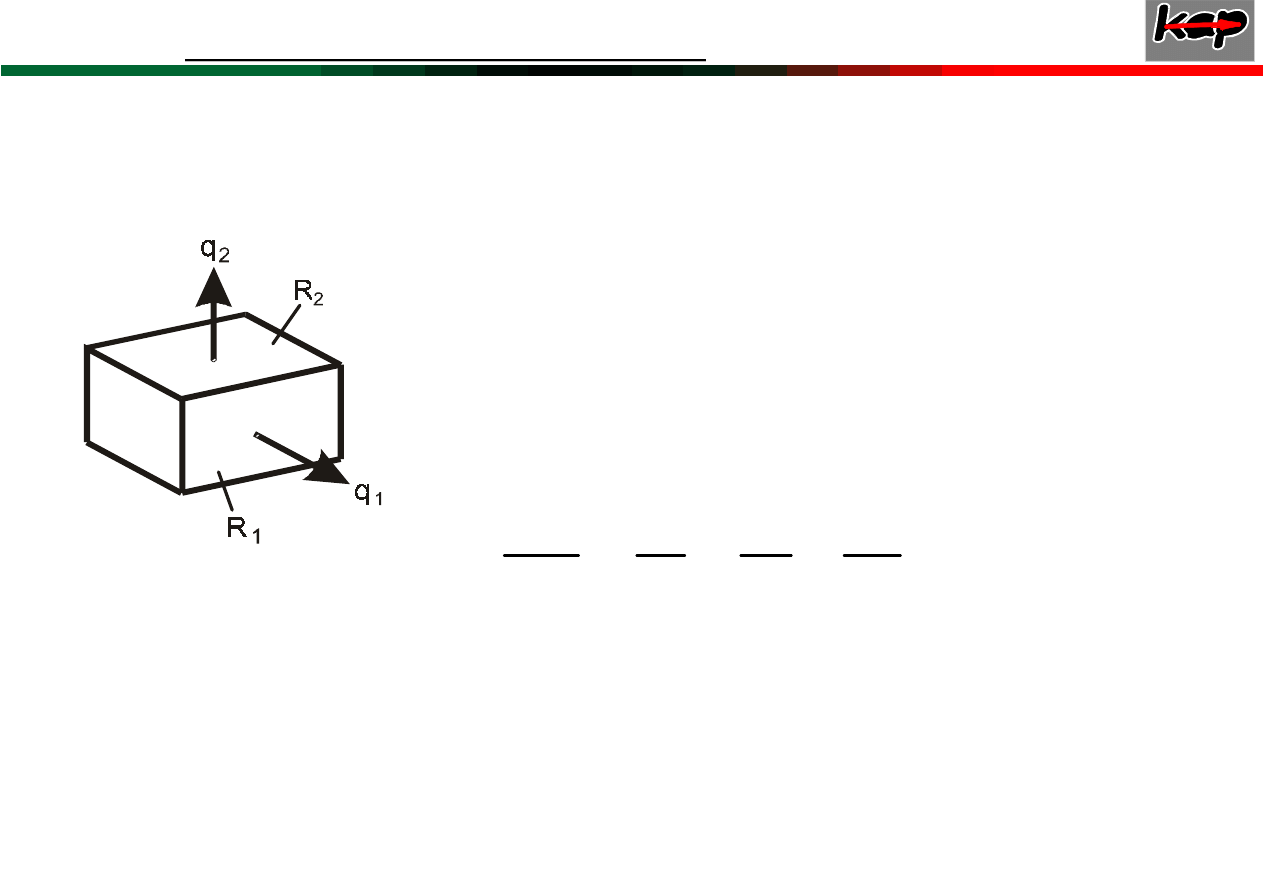
Modelowanie układów cieplnych i przepływowych
Przepływ ciepła
)
T
T
(
R
q
2
1
1
−
=
9
Energia cieplna przepływająca przez ciało jest wprost
proporcjonalna do różnicy temperatur ciała i otoczenia,
zgodnie ze wzorem
q - przepływ energii cieplnej [J/s]
R - opór cieplny [
°
C/J
⋅
s]
T - temperatura [
°
C]
9
Dopływ energii cieplnej do ciała wpływa na jego
temperaturę, zgodnie z relacją
q
C
dt
dT
⋅
=
1
C - pojemność cieplna [J/
°
C]
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
43
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Przykład 7. Dynamiczny model zjawisk cieplnych w pokoju
Ci - pojemność cieplna powietrza wewnątrz pokoju
To - temperatura otoczenia,
Ti - temperatura w pokoju
R1 - opór cieplny ścian pokoju
R2 – łączny opór cieplny sufitu i podłogi pokoju
(
)
i
o
i
i
T
T
R
R
C
dt
dT
−
⋅
+
⋅
=
2
1
1
1
1
Ciepło właściwe c
v
przy stałej objętości jest przeliczane na
pojemność cieplną C
V
c
m
C
⋅
=
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
44
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Przewodność cieplna k, która jest związana z oporem
cieplnym R, określona jest zależnością
l
A
k
R
⋅
=
1
)
(
o
i
v
T
T
c
dt
dm
q
−
⋅
⋅
=
A - pole przekroju poprzecznego
l - długość drogi przepływu ciepła
dt
dm
- szybkość przepływającej masy
powietrza o temperaturze T
i
wypływającej na zewnątrz
pokoju o temperaturze T
o
.
Przykład 7. Dynamiczny model zjawisk cieplnych w pokoju
Sumaryczny przepływ energii opisuje wymianę ciepła, która
może zachodzić pomiędzy masą ciepłą a zimną. W takim
przypadku:
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
45
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Przepływ cieczy nieściśliwych
Równanie bilansu natężenia przepływu płynu wynika z
zasady zachowania masy
wy
we
q
q
dt
dm
−
=
gdzie:
m – masa cieczy wewnątrz opisywanego układu
q
we
– masowe natężenie przepływu na wejściu układu
q
wy
– masowe natężenie przepływu na wyjściu układu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
46
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
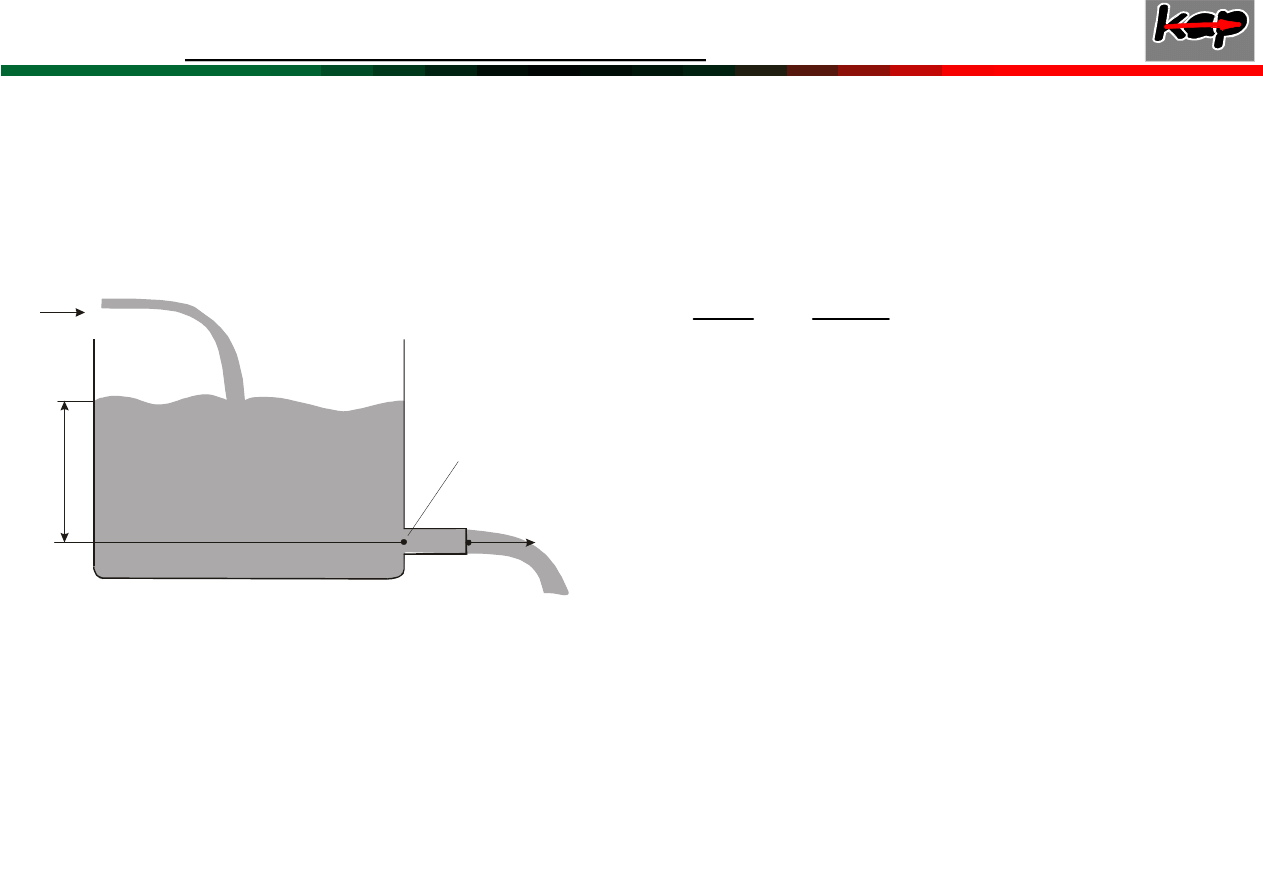
Przykład 8. Zbiornik z wodą
h
q
we
q
wy
ciśnienie p
1
(
)
wy
we
q
q
A
dt
dh
−
=
ρ
1
gdzie:
A – powierzchnia zbiornika
ρ
– gęstość wody
h = m/A
ρ
- wysokość słupa wody
m – masa wody w zbiorniku
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
47
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
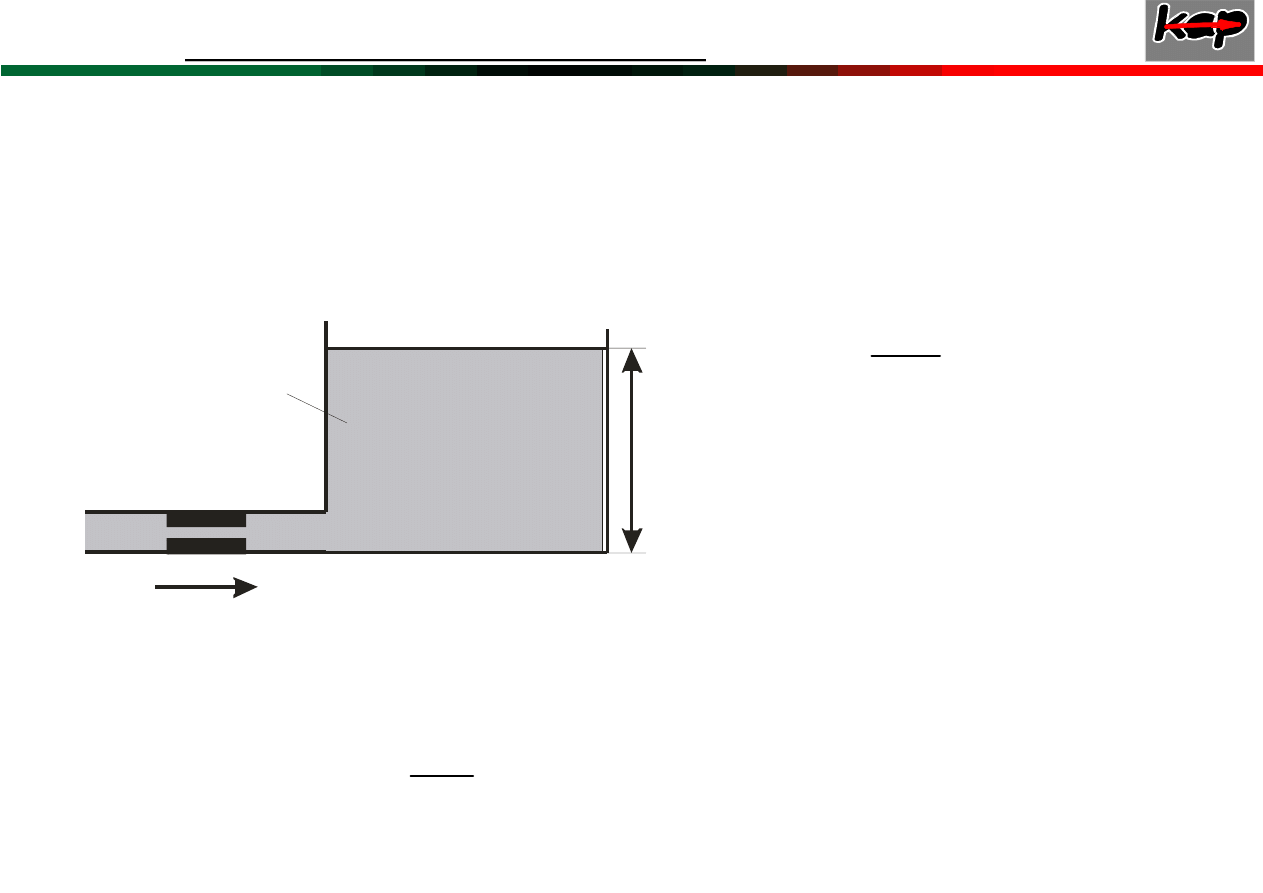
P
R
F
Q
h
P
1
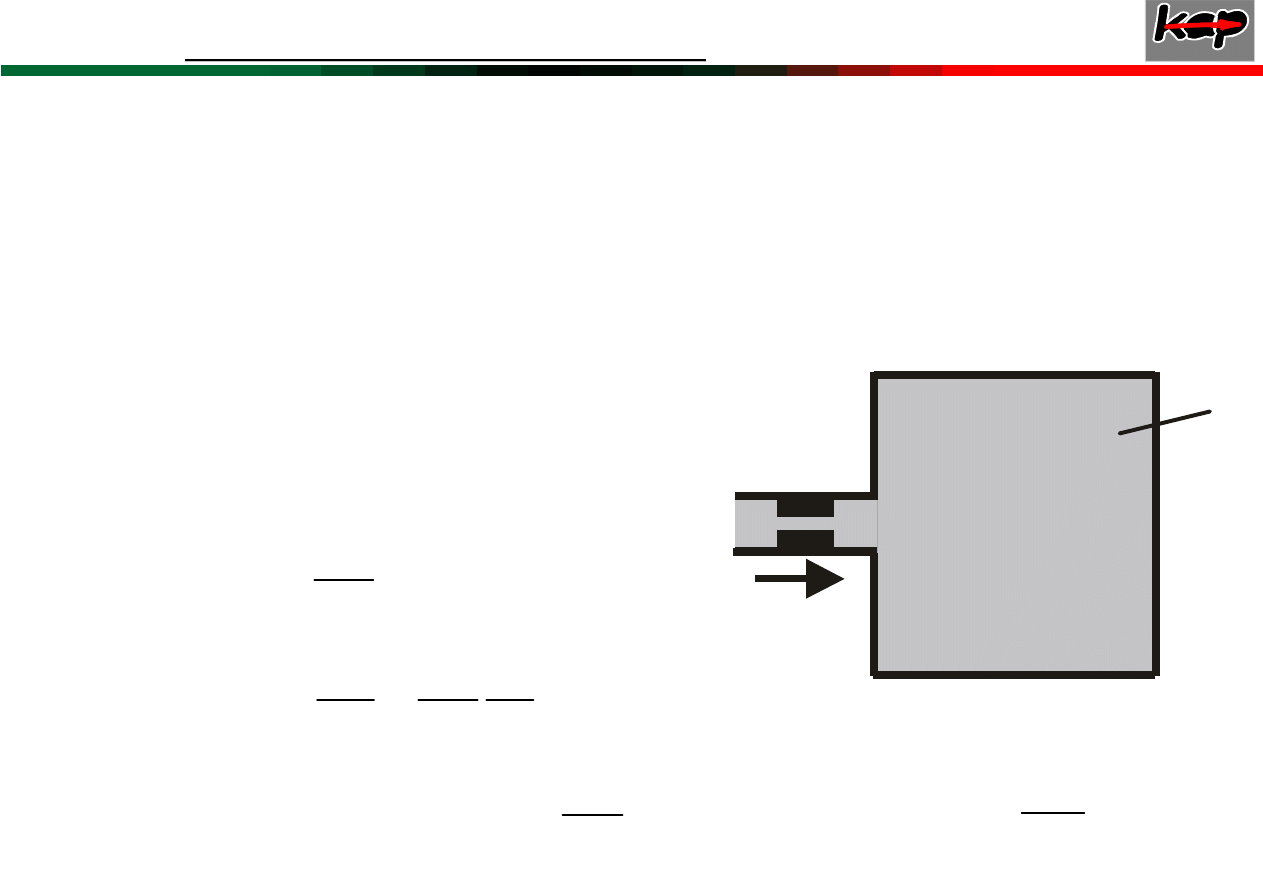
Przykład 9. Napełnianie zbiornika cieczą
Objętościowe natężenie przepływu cieczy Q przez opór
hydrauliczny R
F
)
p
p
(
R
Q
F
−
=
1
1
dt
dh
A
Q =
p
1
- ciśnienie zasilania
p - ciśnienie w zbiorniku
R
F
- opór hydrauliczny
Jest ono równe zmianie objętości cieczy w zbiorniku
A - powierzchnia przekroju zbiornika
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
48
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
dt
dp
g
A
dt
dh
A
p
p
R
F
⋅
=
=
−
ρ
)
(
1
1
F
C
g
A =
⋅
ρ
- pojemność
hydrauliczna
1
p
p
dt
dp
R
C
F
F
=
+
Ciśnienie hydrostatyczne cieczy można wyrazić jako
h
g
p
⋅
⋅
= ρ
Równanie opisujące proces napełniania zbiornika
Przykład 9. Napełnianie zbiornika cieczą
ρ
- gęstość cieczy
g - przyspieszenie ziemskie
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
49
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
gaz
P
P
1
R
F
Q
m
V
T
Przykład 10. Napełnianie zbiornika gazem
Równanie stanu gazu
(
)
p
p
R
Q
F
m
−
=
1
1
GRT
pV
=
dt
dp
RT
V
dt
dG
Q
m
=
=
G – masa gazu
T – temperatura gazu
V – objętość gazu
R
F
– stała gazowa
RT
V
C
F
=
1
p
p
dt
dp
R
C
F
F
=
+
Masowe natężenie przepływu
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
50
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
Postacie matematycznych modeli liniowych
systemów dynamicznych
( )
( )
( )
( )
( )
( )
t
u
b
dt
t
u
d
b
dt
t
u
d
b
t
y
a
dt
t
y
d
a
dt
t
y
d
a
m
m
m
m
m
m
n
n
n
n
n
n
0
1
1
1
0
1
1
1
,...,
,...,
+
+
+
=
=
+
+
+
−
−
−
−
−
−
( )
( )
( )
( )
( )
( )
+
=
+
=
t
Du
t
Cx
t
y
t
Bu
t
Ax
t
x&
Równanie różniczkowe
Równania stanu i wyjścia
0
1
1
1
0
1
1
1
...
...
)
(
)
(
)
(
a
s
a
s
a
s
a
b
s
b
s
b
s
b
s
U
s
Y
s
G
n
n
n
n
m
m
m
m
+
+
+
+
+
+
+
+
=
=
−
−
−
−
Transmitancja operatorowa
Katedra Automatyzacji Procesów
Katedra Automatyzacji Procesów
Wydział Inżynierii Mechanicznej i Robotyki
Wydział Inżynierii Mechanicznej i Robotyki
Akademia Górniczo
Akademia Górniczo
-
-
Hutnicza w Krakowie
Hutnicza w Krakowie
Prof. dr hab. inż. Janusz KOWAL
Prof. dr hab. inż. Janusz KOWAL
Podstawy Automatyki
Podstawy Automatyki
51
Temat wykładu: Modelowanie matematyczne układów dynamicznych
Temat wykładu:
Temat wykładu:
Modelowanie matematyczne układów dynamicznych
Modelowanie matematyczne układów dynamicznych
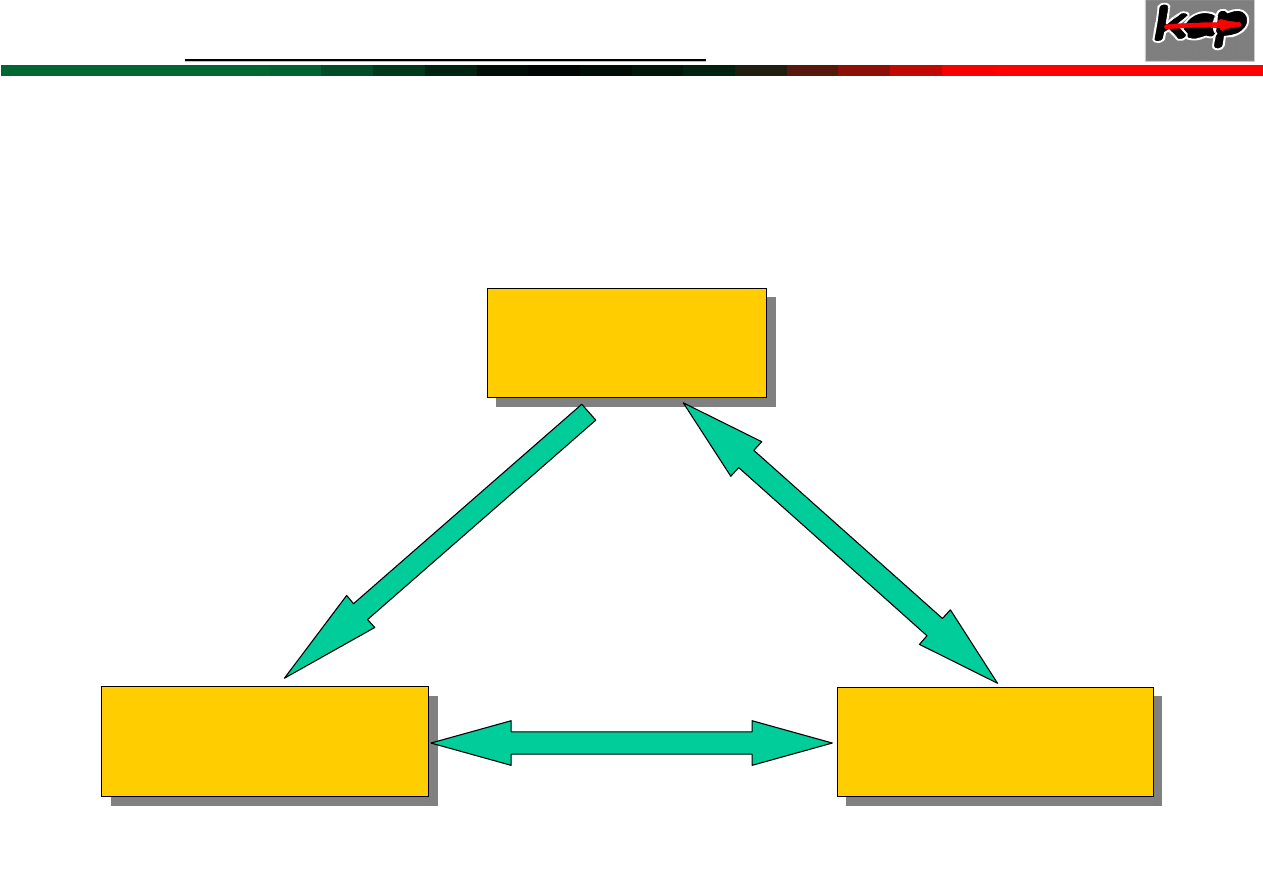
Związki pomiędzy poszczególnymi
postaciami modeli
Równanie
różniczkowe
Równanie
różniczkowe
Transmitancja
operatorowa
Transmitancja
operatorowa
Równania
stanu i wyjścia
Równania
stanu i wyjścia
Wyszukiwarka
Podobne podstrony:
02 Modelowanie matematyczne układów dynamicznych
02 Opis matematyczny układów liniowych
02 Opis matematyczny układów liniowych
Modelowanie układów dynamicznych na elektronicznej maszynie analogowej, STUDIA - Kierunek Transport,
LTS 2 Modelowanie ukladow dynamicznyc
PAcw2 Modelowanie ukladów dynamicznych
Hybrydowe modelowanie procesow demograficznych z wykorzystaniem rozmytych przylaczajacych ukladow dy
modelowanie ukladow dynamicznych material do telefonu
02 Statystyka Matematyczna Zmienna Losowa Ciągłaid 3789
MODELOWANIE MATEMATYCZNE
Modele matematyczne ukladow reg Nieznany
BADANIA OPERACYJNE wykład1, WAT, semestr IV, Modelowanie Matematyczne
12 02 S1 W Matematyka
Modelowanie i analiza modeli dynamicznych z dyskrytnym czasem
lab 10 Modelownie liniowych układów dyskretnych
więcej podobnych podstron