2012-06-23
1
Kinematyka i dynamika układów
mechatronicznych
Część B
Wykład 1
Klasyfikacja mechanizmów
Właściwie opracowana klasyfikacja mechanizmów pozwoliłaby na
odpowiedni dobór mechanizmów do określonych zastosowań.
Umożliwiłaby opracowanie ogólnych metod analizy kinematycznej i
dynamicznej oraz ogólnych podstaw i metod syntezy nowych mechanizmów.
Nie istnieje jak dotąd w pełni zadowalająca klasyfikacja jednocześnie
spełniająca warunki:
- naukowo uzasadniona,
- metodologicznie racjonalna,
- użyteczna w praktyce inżynierskiej.
Obecnie stosowane są dwie wersje klasyfikacji: funkcjonalna i strukturalna.
JCieślik 2012
2
Klasyfikacja mechanizmów
Obecnie stosowane są dwie wersje klasyfikacji: funkcjonalna i strukturalna.
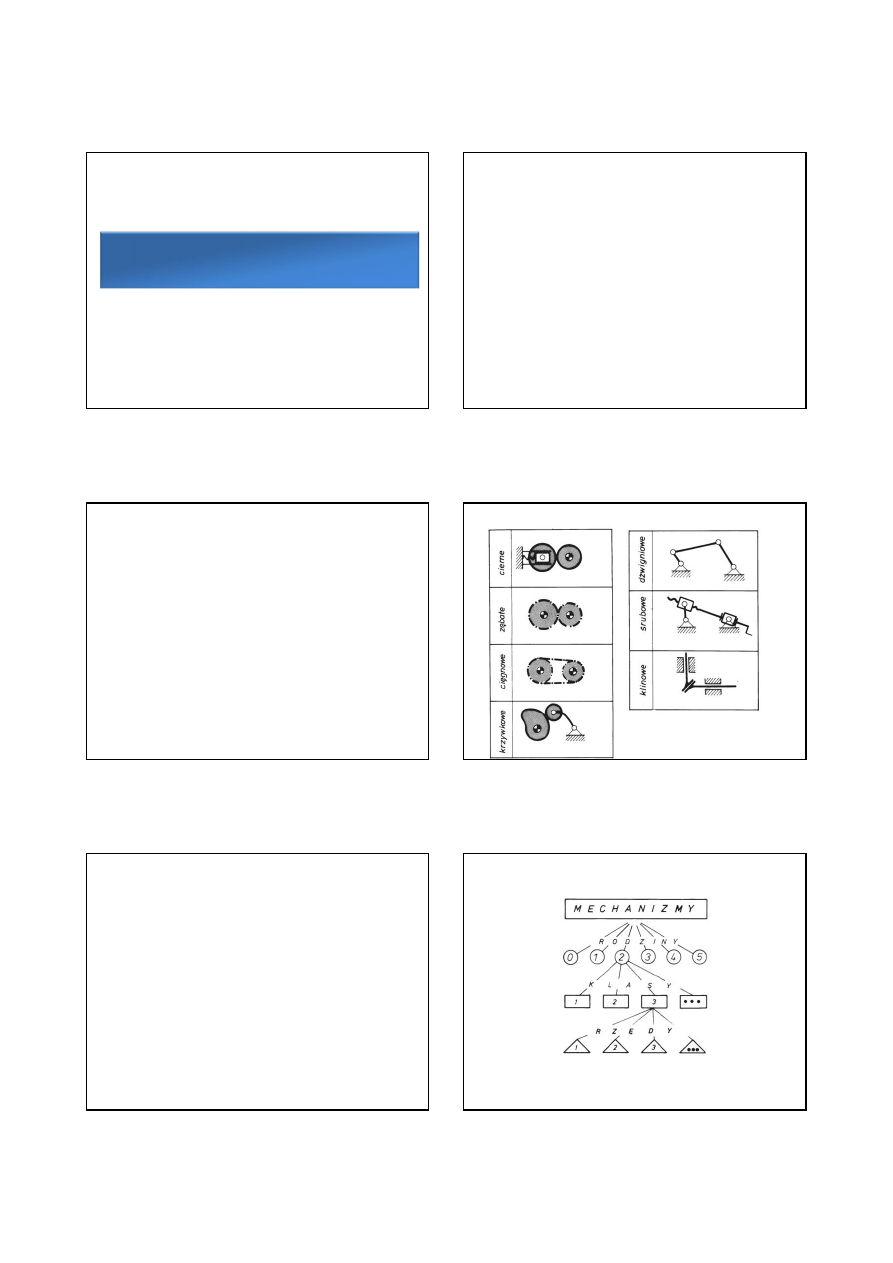
Klasyfikacja funkcjonalna otwiera historyczny już (rok 1875) podział
mechanizmów zasugerowany przez Reuleaux. Klasyfikacja ta nie spełnia
podstawowych kryteriów każdej klasyfikacji naukowej, a mianowicie:
a) kryterium podziału według jednej zasady,
b) kryterium wyłączności,
c) kryterium zupełności.
Pozostając przy tej klasyfikacji sporo kłopotu przysparza zakwalifikowanie
ogromnej liczby mechanizmów bardziej złożonych.
Taki podział mechanizmów nie sugeruje odpowiedniego podziału metod ich
analizy.
JCieślik 2012
3
Klasyfikacja mechanizmów
Przykład klasyfikacji funkcjonalnej.
JCieślik 2012
4
Klasyfikacja mechanizmów
Klasyfikacja strukturalna. Klasyfikacja sugerująca możliwość podziału
wszystkich mechanizmów według cech strukturalnych.
Klasyfikacja ta została zapoczątkowana przez Assura (rok 1914) i była
kolejno uzupełniana. Podstawowe jej zasady prześledzimy na przykładzie
opracowania I. I. Artobolewskiego.
Wszystkie mechanizmy dzieli się na rodziny (rys), przy czym kryterium
takiego podziału jest liczba ogólnych więzów nałożonych na człony
mechanizmu.
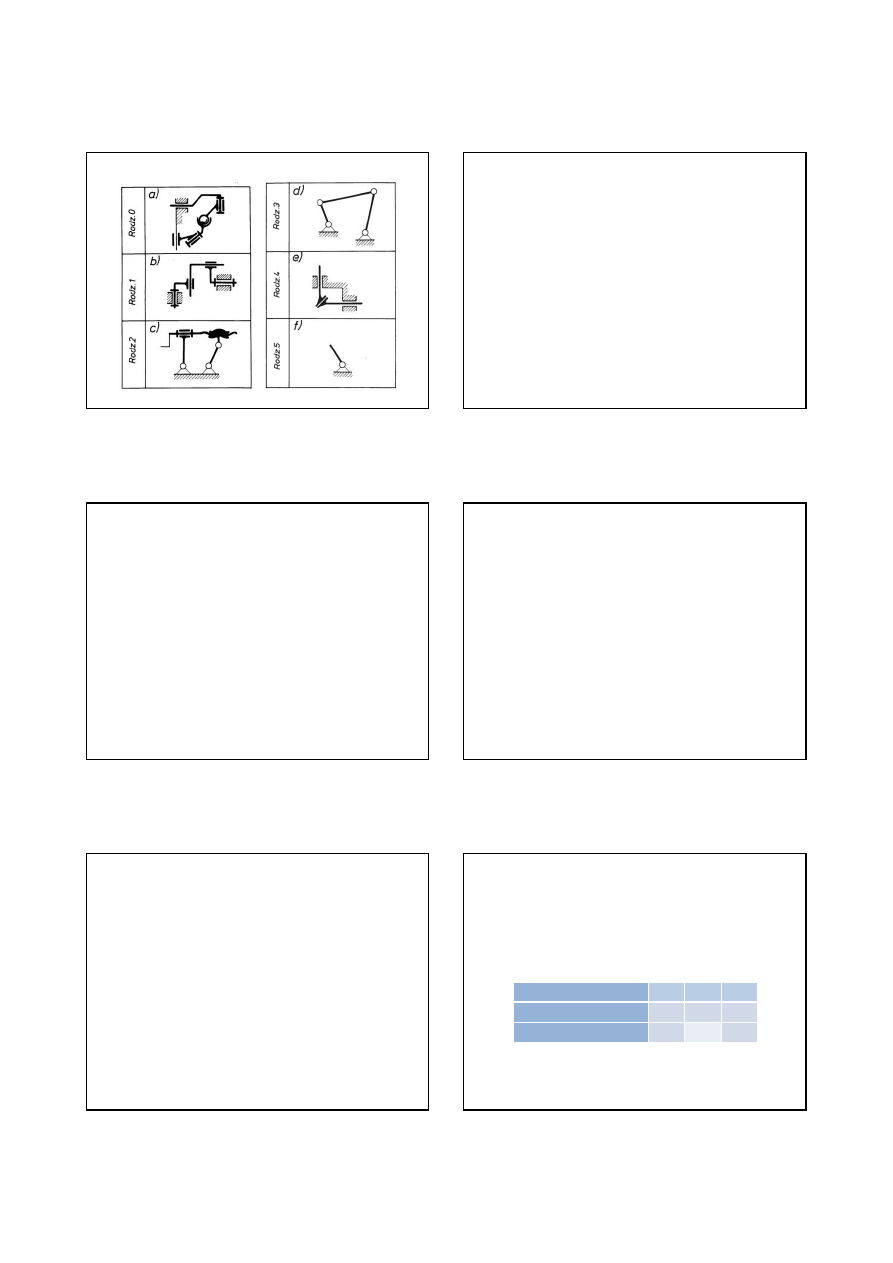
Istotę tego podziału wyjaśniają przykłady mechanizmów reprezentujących
poszczególne rodziny (rys). Do rodziny 0 należą więc wszystkie
mechanizmy przestrzenne, na które nie nałożono żadnych ograniczeń (rys).
Rodzinę 1 tworzą mechanizmy, których człony nie mogą korzystać z
jednego (tego samego) stopnia swobody.
Na przykład w mechanizmie z rys. b żaden z członów nie może wykonywać
obrotu wokół osi prostopadłej do płaszczyzny rysunku.
JCieślik 2012
5
Klasyfikacja mechanizmów
Ilustracja klasyfikacji strukturalnej.
JCieślik 2012
6
2012-06-23
2
Klasyfikacja mechanizmów
Przykłady mechanizmów z podziałem na rodziny.
JCieślik 2012
7
Klasyfikacja mechanizmów
Do rodziny 3 należą między innymi mechanizmy płaskie (rys), gdyż członom
takich mechanizmów odebrano generalnie 3 stopnie swobody itd.
W ramach każdej rodziny dzieli się mechanizmy na klasy, przy czym o klasie
mechanizmu decyduje najwyższa klasa grupy.
Pojęciem grupy określa się łańcuch kinematyczny, w którym ruchowe
połączenie wolnych członów z podstawą zamienia go w układ sztywny.
Oznacza to, że dla grup zwanych dalej grupami Assura, obowiązuje
równanie strukturalne w postaci:
w = 3n – p
4
– 2p
5
gdzie
n – liczba członów ruchomych łańcucha kinematycznego,
p
4
– liczba par kinematycznych klasy 4-tej,
P
5
– liczba par kinematycznych klasy 5-tej,
JCieślik 2012
8
Klasyfikacja mechanizmów
Kolejność postępowania przy klasyfikacji strukturalnej mechanizmów :
–
należy sporządzić schemat kinematyczny mechanizmu w postaci
zamkniętego łańcucha kinematycznego,
–
w przypadku występowania w mechanizmie par kinematycznych
wyższych (klasy 4) należy sporządzić schemat zastępczy, w którym
występują wyłącznie pary niższe (klasy 5),
–
obliczyć ruchliwość „w” tak utworzonego łańcucha kinematycznego,
wybrać człony napędzające w liczbie równej ruchliwości „w” i oddzielić
je od łańcucha kinematycznego,
–
pozostałą część łańcucha podzielić na grupy strukturalne,
–
określić klasę mechanizmu, która jest równa najwyższej klasie grupy
strukturalnej.
JCieślik 2012
9
Klasyfikacja mechanizmów
Przy zamianie par wyższych (kl. 4-tej) na niższe (kl.5-tej) muszą być
spełnione warunki:
–
ruch chwilowy łańcucha musi pozostać niezmieniony,
–
ruchliwość łańcucha musi pozostać niezmieniona, dlatego każdą parę
klasy 4 należy zastąpić dwiema parami klasy 5, wprowadzając dodatkowy
człon łączący się z nowo utworzonymi parami niższymi.
JCieślik 2012
10
Klasyfikacja mechanizmów
Grupa strukturalna jest częścią łańcucha kinematycznego mechanizmu speł-
niającą dwa warunki:
1. połączenie ruchowe z podstawą wszystkich członów zewnętrznych grupy
zamienia ją w układ sztywny tj. układ o ruchliwości w = 0; (układ o
ruchliwości w = 0 jest zawsze układem statycznie i dynamicznie
wyznaczalnym),
2. wyodrębniona część łańcucha kinematycznego spełniająca warunek 1 nie
da się podzielić na prostsze układy (np. poprzez odłączenie członów)
również spełniające ten warunek.
Grupę strukturalną definiuje się w sposób umowny na podstawie liczby czło-
nów i par oraz sposobu przyłączenia ich do podstawy.
Definiuje się pojęcie rzędu i klasy grupy.
O klasie grupy decyduje najbardziej rozbudowany wielobok występujący w
schemacie grupy. Klasa grupy jest równa liczbie boków tego wieloboku.
Rząd grupy strukturalnej jest określony poprzez liczbę półpar kinematycznych
zewnętrznych, za pomocą, których łączy się grupę z podstawą, aby zamienić ją
w układ sztywny.
JCieślik 2012
11
Klasyfikacja mechanizmów
Ruchliwość grupy (po uwzględnieniu faktu, że występują w niej wyłącznie pary
klasy 5) określona jest dla mechanizmów płaskich zależnością:
w
gr
= 3n – 2p
5
= 0
Równanie (1.5) spełniają pary liczb podane w tabeli
Tabela
Grupa strukturalna klasy 1 nie występuje w praktyce. W niektórych podręczni-
kach człon napędzający uznaje się za grupę klasy 1.
liczba członów n
2
4
6
liczba par kinematycznych p
5
3
6
9
klasa grupy
2
3
4
JCieślik 2012
12
2012-06-23
3
Klasyfikacja mechanizmów
W grupie strukturalnej liczba członów n jest zawsze parzysta, a liczba par p
5
jest wielokrotnością liczby 3.
Dołączenie jednej lub więcej grup strukturalnych do istniejącego łańcucha
kinematycznego nie zmienia nigdy ruchliwości nowo utworzonego łańcucha,
ponieważ ruchliwość grupy w
gr
= 0.
W ten sposób dołączając do istniejącego mechanizmu nowe grupy
strukturalne w układzie szeregowym, równoległym bądź szeregowo-
równoległym można utworzyć nowe mechanizmy nie zmieniając przy tym
ruchliwości, a zatem i liczby wymaganych członów napędzających.
Połączenie członów zewnętrznych grupy strukturalnej z podstawą (rys.)
powoduje zamianę wyodrębnionej część łańcucha kinematycznego w układ
sztywny w
gr
= 0.
Taki układ członów jest statycznie i dynamicznie wyznaczalny.
JCieślik 2012
13
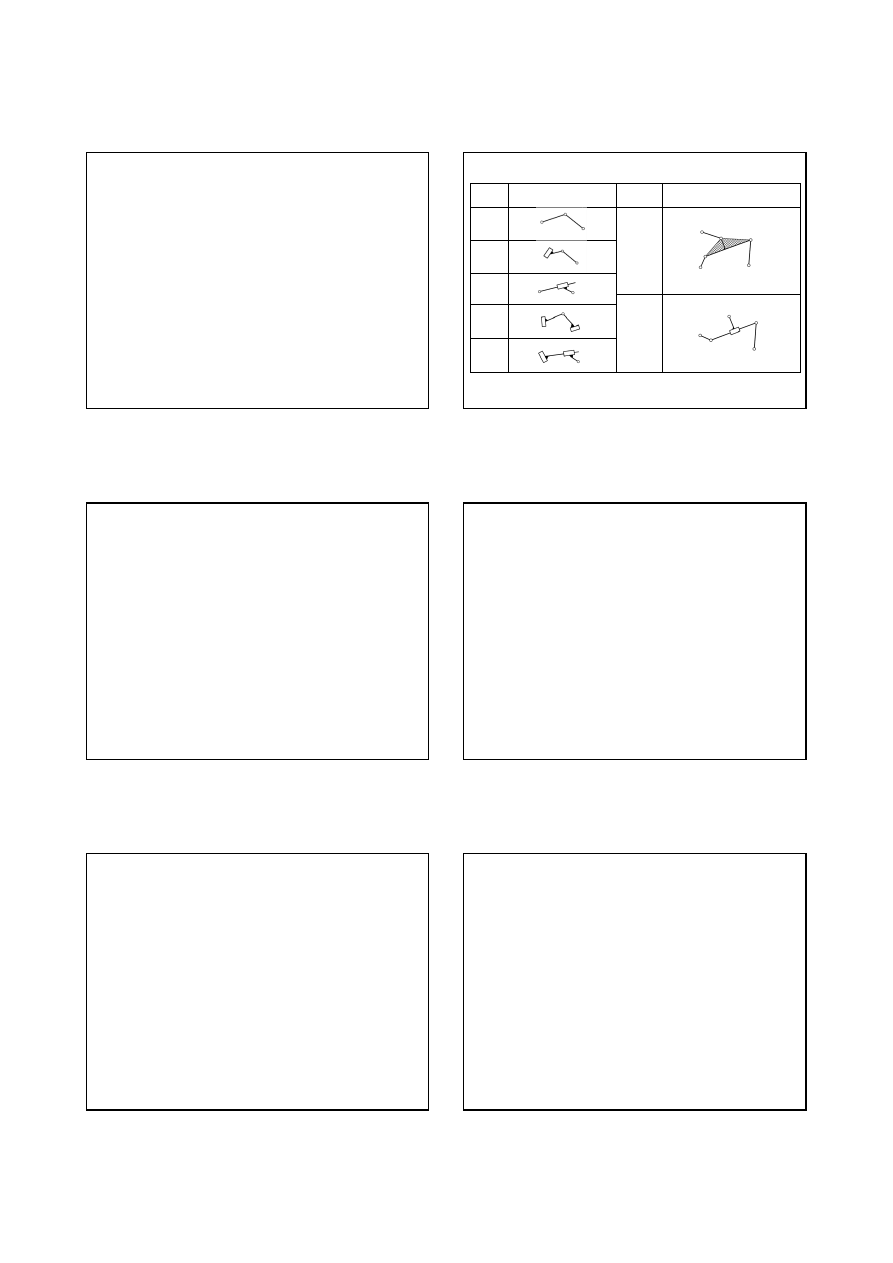
Typowe grupy strukturalne
Postać
grupy
Schemat grupy klasy 2,
rząd 2
Postać
grupy
Schemat grupy klasy 3, rząd 3
1
1
2
3
2
4
5
JCieślik 2012
14
Kinematyka mechanizmów
Kinematyka mechanizmów obejmuje zagadnienia związane z badaniem
ruchu mechanizmów, przy założeniu, że człony mechanizmów są sztywne
i nie uwzględnia się ani wpływu ich mas, ani działających sił.
Przedmiotem rozważań są więc:
- położenia członów,
- trajektorie punktów,
- prędkości liniowe i kątowe,
- przyspieszenia liniowe i kątowe.
JCieślik 2012
15
Kinematyka mechanizmów
Do określenia tych parametrów można korzystać z różnorakich metod, np.:
- graficznych,
- analitycznych,
- numerycznych,
- kombinowanych.
O wyborze metody decydują: rodzaj badanego problemu, potrzeby
dotyczące szybkości otrzymanych wyników i ich dokładności.
Rozwój współczesnych środków obliczeniowych (komputery) promuje
metody analityczne i numeryczne.
Jednak stosowane są wciąż jeszcze metody graficzne (np. metoda toru
ocechowanego daje szybkie i dokładne wyniki w porównaniu z
rozwiązywaniem złożonych równań trygonometrycznych).
JCieślik 2012
16
Kinematyka mechanizmów
Metody graficzne
Metody graficzne, dziś już klasyczne, umożliwiają w pewnych przypadkach
określenie parametrów ruchu mechanizmów w sposób prosty i bardzo
poglądowy.
Mają niezaprzeczalny aspekt dydaktyczny, łatwiej też z ich pomocą wyjaśnić
pewne pojęcia kinematyczne.
Znajomość metod graficznych ułatwia zwykle dokonanie zapisu
analitycznego.
Stanowią one cenne uzupełnienie pozostałych metod przez to również, że
umożliwiają sprawdzenie poprawności wyników uzyskanych na innej drodze.
Podstawową wadą metod graficznych jest to, że uzyskane wyniki dotyczą
zwykle jednego położenia mechanizmu i charakteryzują się określoną
dokładnością.
JCieślik 2012
17
Kinematyka mechanizmów
Metody graficzne
Podziałki
Stosując graficzne metody analizy kinematycznej przedstawiamy
występujące wielkości, np. przemieszczenie, czas, prędkość, przyspieszenie,
w postaci odcinka linii prostej. Aby to przedstawienie było jednoznaczne,
wprowadza się pojęcie podziałki.
Podziałką będziemy nazywać stosunek wartości wielkości rzeczywistej do
wartości wielkości rysunkowej.
JCieślik 2012
18
2012-06-23
4
Kinematyka mechanizmów
Metody graficzne
Położenia i trajektorie
Określanie położeń członów w poszczególnych fazach ruchu mechanizmu
oraz trajektorii (torów), jakie zakreślają pewne charakterystyczne punkty
związane z członami ruchomymi, należy do najprostszych zadań analizy
kinematycznej.
Położenia
Każdy mechanizm można rozłożyć na grupy członów, z których każda po
przyłączeniu wolnymi pół-parami do podstawy tworzy układ sztywny.
Taki podział mechanizmu umożliwia badanie jego parametrów poprzez
analizę poszczególnych grup. Jest to pewne udogodnienie, gdyż pozwala
zarówno na uogólnienie metod badania, jak również ograniczenie rodzajów
omawianych mechanizmów.
Jednymi z prostszych (według klasyfikacji strukturalnej) są mechanizmy 4
klasy. Najbardziej elementarnymi grupami są grupy 4 klasy, tzn. grupy
składające się z dwóch członów typu 2 oraz trzech par 5 klasy postaci
obrotowej lub postępowej.
JCieślik 2012
19
Kinematyka mechanizmów
Metody graficzne
Trajektorie
Trajektorią lub torem punktu nazywamy miejsce geometryczne jego
kolejnych położeń w przyjętym układzie odniesienia.
Tor można wyznaczyć metodą geometryczną, określając kolejne położenia
członu, do którego rozpatrywany punkt należy (rys.), lub metodą
wzornikową (rys.).
Jeżeli na wykreślonej drodze punktu M nanieść kolejne jego położenia
wyznaczające odcinki drogi przebyte w jednakowych odstępach czasu, to
otrzymamy tzw. tor ocechowany (rys.). Wykreślanie jego jest ułatwione, gdy,
jak to zwykle bywa, człon napędzający pozostaje w ruchu obrotowym
jednostajnym. W mechanizmie z (rys.C) tak jest, i wtedy jednakowym
przedziałom czasu można przyporządkować takie same drogi kątowe korby
AB lub odcinka toru punktu B.
JCieślik 2012
20
Kinematyka mechanizmów
Metody graficzne
Trajektorie
Znajomość kształtu trajektorii niektórych punktów mechanizmu jest czasem
niezbędna do określania kolejnych położeń mechanizmu (rys. A). Często
kształt wykreślanej trajektorii decyduje o istocie działania całego
mechanizmu.
Tor ocechowany może być wykorzystany do określania parametrów ruchu
rozpatrywanego punktu, np. prędkości i przyspieszenia. Np. metoda toru
ocechowanego lub metoda wykresów czasowych.
JCieślik 2012
21
Kinematyka mechanizmów
Metody graficzne
Wykreślanie trajektorii metodą geometryczną.
JCieślik 2012
22
Kinematyka mechanizmów
Metody graficzne
Wykreślanie trajektorii metodą toru ocechowanego.
JCieślik 2012
23
Kinematyka mechanizmów
Metody graficzne
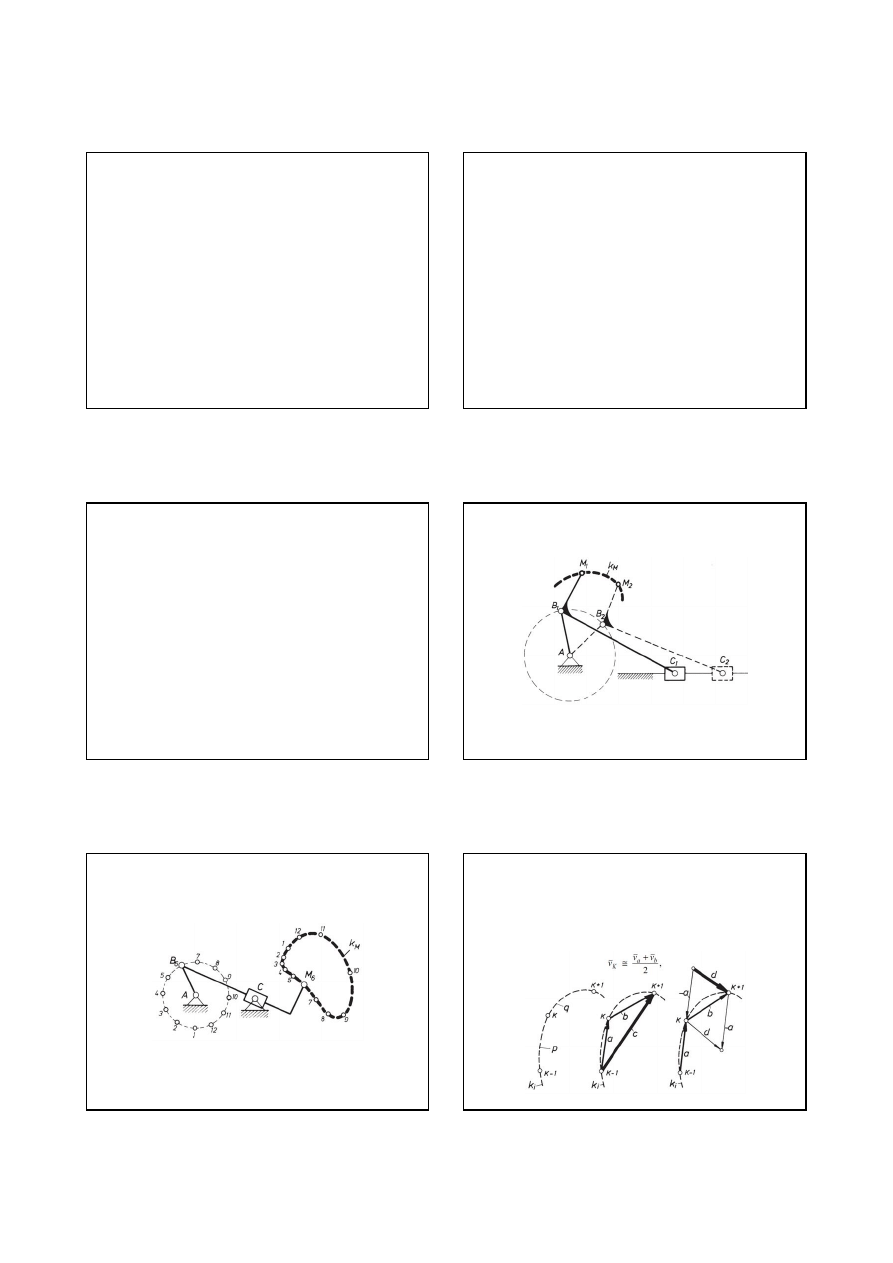
Dana trajektoria k
i
punktu K (rys. a), należącego do członu mechanizmu.
Przemieszczenia po fragmentach trajektorii p i q, pomiędzy punktami K-1, K
oraz K, K+1, odpowiadają równym przedziałom czasowym Δt. Po zastąpieniu
rzeczywistych przemieszczeń p i q odpowiednio wektorami a i b (rys. b),
średnią prędkość punktu I w położeniu K można wyrazić zależnością
Wykreślanie trajektorii metodą toru ocechowanego.
JCieślik 2012
24
2012-06-23
5
Kinematyka mechanizmów
Metody graficzne
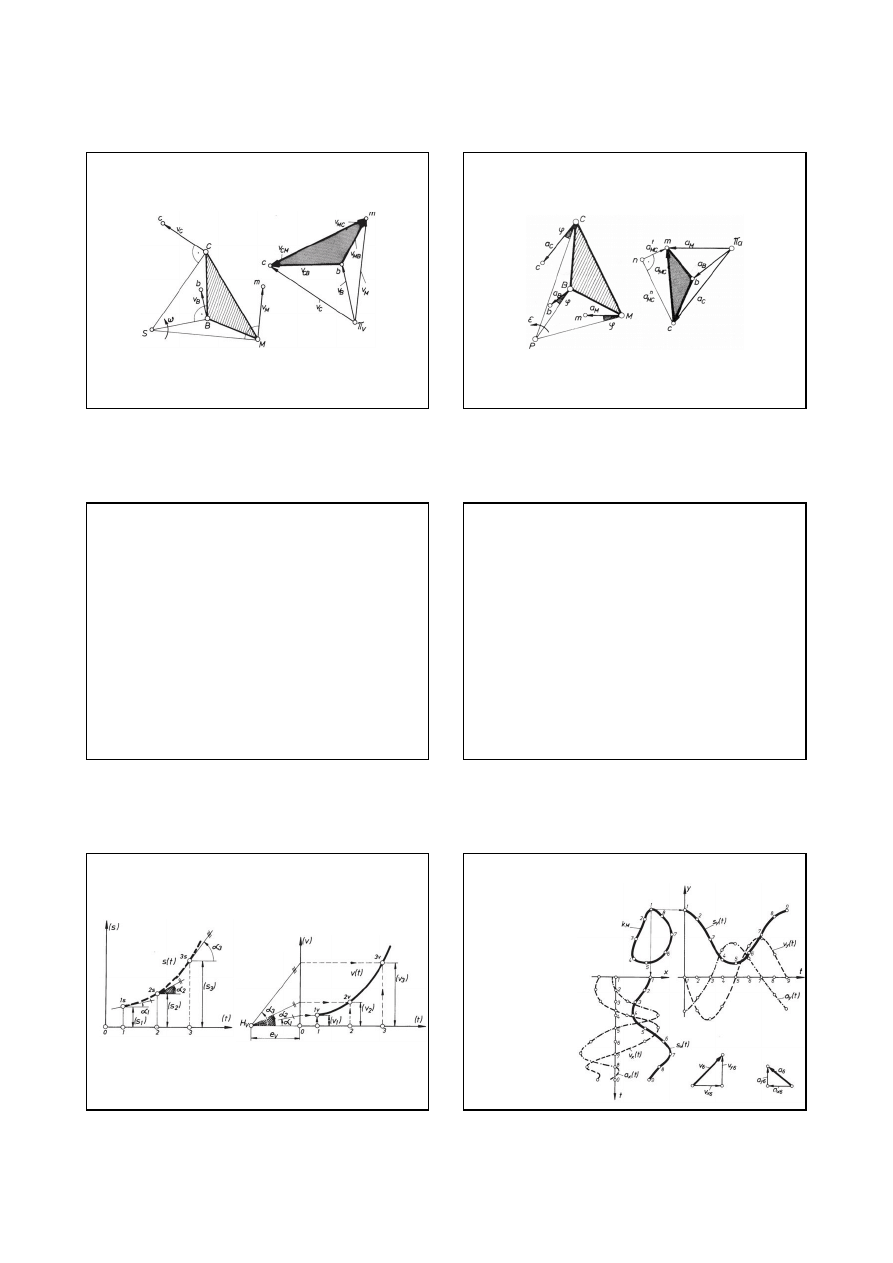
Metoda planów (plan prędkości)
Plan prędkości: a) człon BCM w ruchu złożonym płaskim, b) plan prędkości
członu BCM
JCieślik 2012
25
Kinematyka mechanizmów
Metody graficzne
Metoda planów (plan przyspieszeń)
Plan przyspieszeń: a) człon BCM w ruchu złożonym płaskim, b) plan
przyspieszeń członu BCM
JCieślik 2012
26
Kinematyka mechanizmów
Metody graficzne
Metoda wykresów kinematycznych
Wykresy kinematyczne są graficznym przedstawieniem zależności drogi,
prędkości liniowej i przyspieszenia liniowego lub kąta obrotu, prędkości
kątowej i przyspieszenia kątowego członu od określonego parametru.
W opisie ruchu punktu lub członu mechanizmu parametrem może być czas
lub dowolna inna współrzędna uogólniona, np. droga wybranego punktu
lub kąt obrotu członu czynnego.
Podczas sporządzania wykresów kinematycznych pewne przebiegi
(np. s = s(t)) należy poddać operacji różniczkowania (np. v = ds/dt) lub
całkowania (np. v = ∫adt).
JCieślik 2012
27
Kinematyka mechanizmów
Metody graficzne
Różniczkowanie metodą stycznych
Dla zadanej krzywej przemieszczeń s(t) (rys. a) należy znaleźć przebieg zmian
prędkości v(t) w funkcji czasu. Załóżmy na początku, że znany wykres s(i)
i szukany v(t) będą miały wspólną podziałkę czasu K
t
[s/mm], co umożliwi
usytuowanie układów współrzędnych jak na rys.
Na krzywej s(i) przyjęto dowolne punkty 1s, 2s, np. odpowiadające
jednakowym odcinkom czasu Δt i do krzywej w tych punktach poprowadźmy
styczne.
JCieślik 2012
28
Kinematyka mechanizmów
Metody graficzne
Metoda wykresów kinematycznych
Przykład graficznej metody różniczkowania funkcji: a) krzywa s(t), b) rezultat
różniczkowania v(t)
JCieślik 2012
29
Kinematyka mechanizmów
Metody graficzne
Metoda wykresów kinematycznych
Analiza ruchu punktu M
metodą wykresów kinematycznych.
JCieślik 2012
30
2012-06-23
6
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Metody analityczne kinematyki mają istotne znaczenie zarówno na etapie
analizy jak i syntezy mechanizmów, ponieważ umożliwiają uzyskanie
wzorów analitycznych pozwalających na jednoznaczne określenie wpływu
parametrów geometrycznych mechanizmów na ich parametry
kinematyczne.
Metody analityczne umożliwiają określenie związków między parametrami
określającymi położenia członów a ich prędkościami i przyspieszeniami li-
niowymi oraz prędkościami i przyspieszeniami kątowymi w postaci ciągłych
funkcji czasowych, które uzyskuje się zwykle na drodze odpowiedniej
obróbki (różniczkowanie) funkcji położenia. Te funkcje położenia można
uzyskać różnymi metodami, dobieranymi stosownie do analizowanego
obiektu. Najczęściej stosuje się wtedy tzw. metodę zapisu wektorowego.
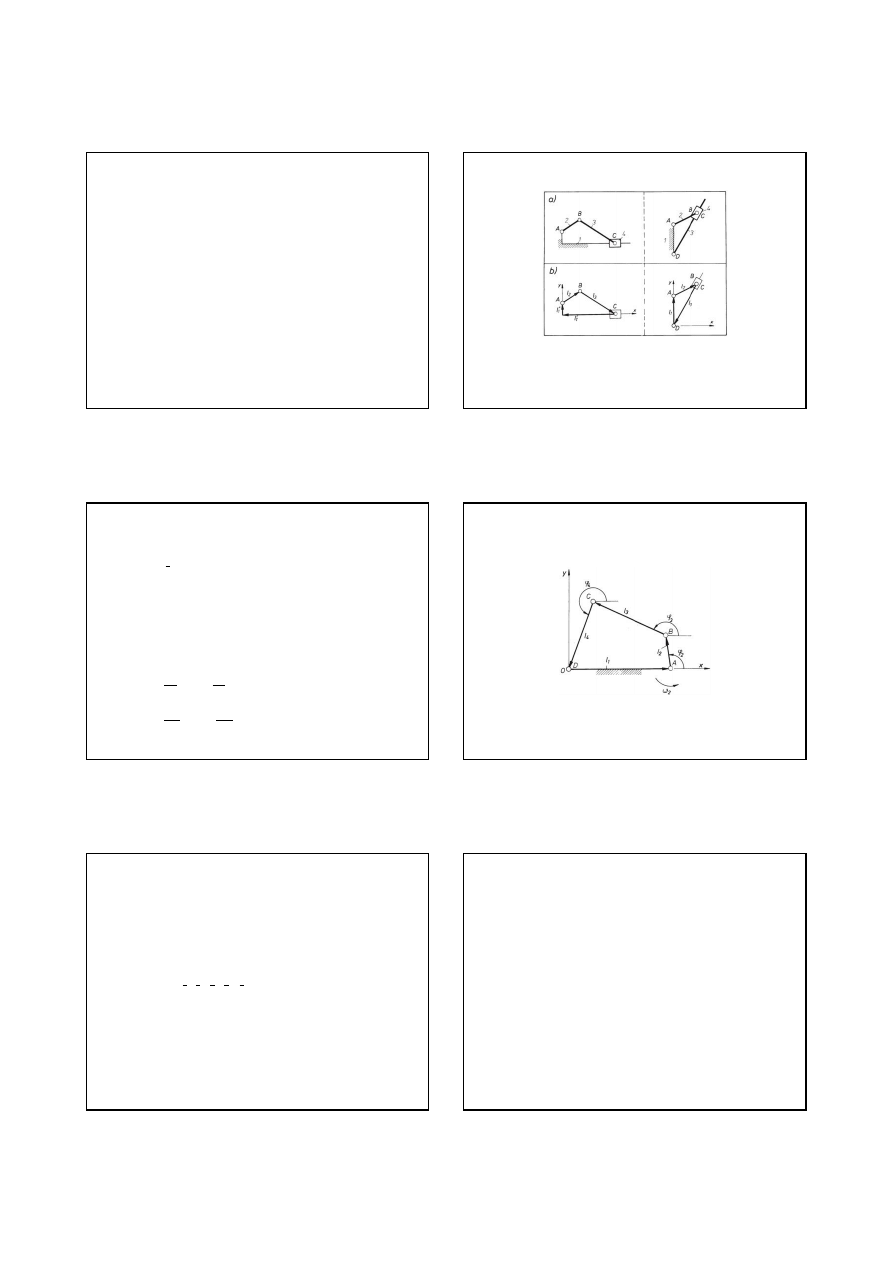
Metoda zapisu wektorowego polega na zastępowaniu łańcucha
kinematycznego członów mechanizmu odpowiednim łańcuchem
wektorowym. Przykład przedstawiono na rys.
JCieślik 2012
31
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Rys. Zastępowanie łańcuchów kinematycznych łańcuchami wektorowymi:
a) przykłady mechanizmów, b) łańcuchy wektorowe
JCieślik 2012
32
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Warunek zamykania się takich wieloboków wektorowych ma postać:
lub
W równaniach l
ix
i l
iy
oznaczają rzuty wektorów na osie x i y układu
współrzędnych. Wprowadzając umowę co do oznaczeń i odkładania kątów
kierunkowych kolejnych wektorów, to rzuty l
ix
i l
iy
można wyrazić:
Zależności na prędkości i przyspieszenia otrzymuje się z powyższych równań
różniczkując je względem czasu.
oraz
JCieślik 2012
33
0
i
l
0,
0
ix
iy
l
l
cos
,
sin
ix
i
i
iy
i
i
l
l
l
l
0 ,
0
iy
ix
dl
dl
dt
dt
2
2
2
2
0 ,
0
iy
ix
d l
d l
dt
dt
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Przypomnimy analizę na przykładzie czworoboku przegubowego:
Schemat do analitycznej metody badania parametrów ruchu czworoboku
przegubowego.
JCieślik 2012
34
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Dla danego czworoboku przegubowego ABCD (rys.) o znanych długościach
członów l
1
, l
2
, l
3
i l
4
oraz prędkości kątowej ω członu czynnego należy
określić położenia, prędkości i przyspieszenia wszystkich członów.
Przyjmujemy układ współrzędnych xOy, a człony mechanizmu zastąpimy
przez odpowiednie wektory l
1
, l
2
, l
3
i l
4
. Równanie wektorowe wieloboku
w tym przypadku ma postać:
a równania we współrzędnych x i y przy wprowadzonych oznaczeniach kątów
Dalej kolejno różniczkując i uwzględniając dane dla czworoboku otrzymujemy
prędkości liniowe punktów i prędkości kątowe członów oraz odpowiednio
przyspieszenia linowe i kątowe.
JCieślik 2012
35
1
2
3
4
0
l
l
l
l
1
2
2
3
3
4
4
cos
cos
cos
0
l
l
l
l
2
2
3
3
4
4
sin
sin
sin
0
l
l
l
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
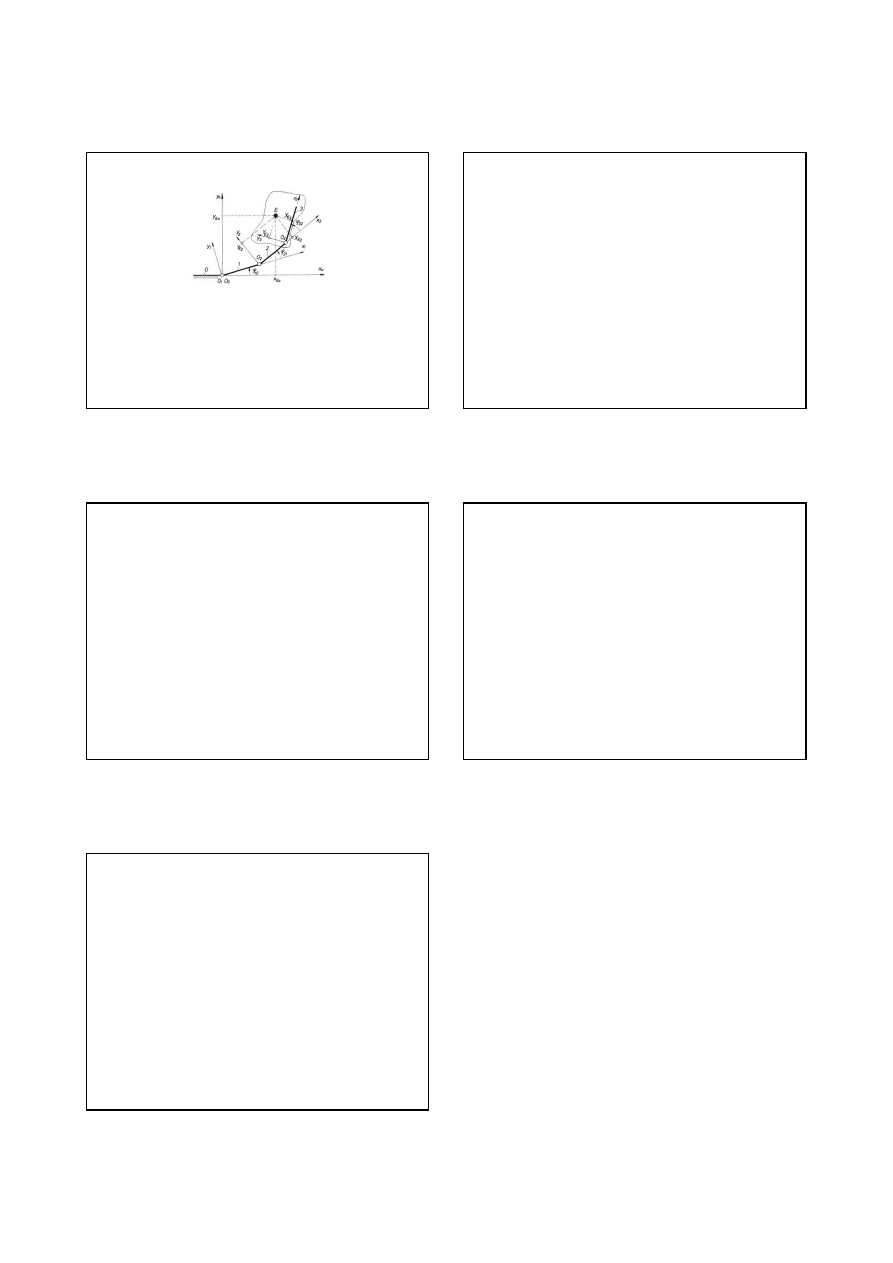
Inną metodą jest metoda macierzowa, stosowana przy wykorzystywaniu
metod obliczeniowych, opisana dalej na przykładzie analizy łańcuchów
kinematycznych otwartych (jak np. manipulatorów).
Dany jest płaski łańcuch kinematyczny otwarty złożony z czterech członów
tworzących kolejno ze sobą tylko pary obrotowe (rys.). Ruchliwość tego
łańcucha wynosi w = 3. Przyjmijmy, że zadane są ruchy względne ω
10
, ω
21
i
ω
32
oraz, że kąty φ
10
, φ
21
i φ
32
są określonymi funkcjami czasu. Załóżmy, że
znane są parametry geometryczne łańcucha (długość członów l
1
i l
2
oraz
współrzędne x
E3
i y
E3
punktu E, związanego na sztywno z członem (3).
Należy określić trajektorię punktu E
3
w układzie podstawy O czyli określić
współrzędne punktu E
3
w układzie podstawy – x
EO
i y
EO
.
Wprowadźmy układy pomocnicze x
1
O
1
y
1
, x
2
O
2
y
2
i x
3
O
3
y
3
związane z
kolejnymi członami i wyraźmy położenie punktu E w tych układach.
JCieślik 2012
36
2012-06-23
7
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Schemat do macierzowego zapisu położenia punktu E.
Na podstawie rysunku otrzymamy:
JCieślik 2012
37
2
3
32
3
32
2
cos
sin
E
E
E
x
x
y
l
2
3
32
3
32
sin
cos
E
E
E
y
x
y
1
2
21
2
21
1
cos
sin
E
E
E
x
x
y
l
1
2
21
2
21
sin
cos
E
E
E
y
x
y
0
1
10
1
10
cos
sin
E
E
E
x
x
y
0
1
10
1
10
sin
cos
E
E
E
y
x
y
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Uzyskano sześć równań z sześcioma niewiadomymi. Po rozwiązaniu tych
równań można otrzymać szukane x
EO
i y
EO
.
Dla uproszczenia zapisów dogodnie jest przejść na zapis macierzowy.
W tym celu przepiszmy układ dwóch pierwszych równań uzupełniony
tożsamością 1 = 1 .
Powyższy układ równań można zapisać w postaci macierzowej:
JCieślik 2012
38
2
32
32
2
3
2
32
32
3
cos
sin
sin
cos
0
1
0
0
1
1
E
E
E
E
x
l
x
y
y
2
3
32
3
32
sin
cos
0
E
E
E
y
x
y
1
1 0
1 0
1
2
3
32
3
32
2
cos
sin
E
E
E
x
x
y
l
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Przyjmując powyższą zasadę, kolejne układy równań można zapisać w postaci
macierzowej. Przyjmijmy dalej oznaczenia:
oraz
JCieślik 2012
39
32
32
2
32
32
32
cos
sin
T
sin
cos
0
0
0
1
l
21
21
1
21
21
21
cos
sin
T
sin
cos
0
0
0
1
l
10
10
10
10
10
cos
sin
0
T
sin
cos
0
0
0
1
3
2
1
3
3
2
2
1
1
0
r
,
r
,
r
,
r
1
1
1
1
E
E
E
E
E
E
E
E
E
E
E
E
x
x
x
x
y
y
y
y
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Układ sześciu wyjściowych równań można zapisać w postaci:
lub po podstawieniu
Po wykonaniu mnożenia z ostatniego zapisu otrzymamy:
gdzie
Różnice na korzyść metod macierzowych ujawniają się szczególnie podczas
badania łańcuchów przestrzennych.
JCieślik 2012
40
2
32
3
r
T r
E
E
1
21
2
r
T r
E
E
0
10
1
r
T r
E
E
0
10
21
32
3
r
T T T r
E
E
0
3
30
3
30
2
20
1
10
cos
sin
cos
cos
E
E
E
x
x
y
l
l
0
3
30
3
30
2
20
1
10
sin
cos
sin
sin
E
E
E
y
y
x
l
l
30
32
20
20
21
10
,
Analiza kinematyczna mechanizmów płaskich
metodami analitycznymi
Bardzo skuteczną i godną polecenia jest metoda polegająca na podziale
badanego mechanizmu na grupy członów (grupy Assura) i człony czynne.
Opracowane dla poszczególnych grup zapisy macierzowe umożliwiają
(w sposób niemal schematyczny) zapis funkcji położenia dla dowolnego
płaskiego mechanizmu dźwigniowego.
Dysponując zapisem funkcji położenia można otrzymać poszukiwane funkcje
prędkości i przyspieszeń poprzez odpowiednie ich przekształcenia
(różniczkowanie po czasie).
JCieślik 2012
41
Wyszukiwarka
Podobne podstrony:
af-w01
af w01
W01(Patomorfologia) II Lek
w01
IMW W01 Wstepny System produkc Nieznany
harm TSiTR 2014lato AF
AF wyklad1 id 52504 Nieznany (2)
FPA W01 v1 0
bal w01
BD 2st 1 2 w01 tresc 1 1 (2)
MB W01 PWr
AM23 w01 Całki niewłaściwe pierwszego rodzaju
PA W01 Wprowadzenie
af-wyk7, FIR UE Katowice, SEMESTR V, Analiza finansowa
Gazownictwo w01
więcej podobnych podstron