
1
PROJEKTOWANIE PODNOŚNIKA ŚRUBOWEGO ZWYKŁEGO Z
NAPĘDZANĄ ŚRUBĄ
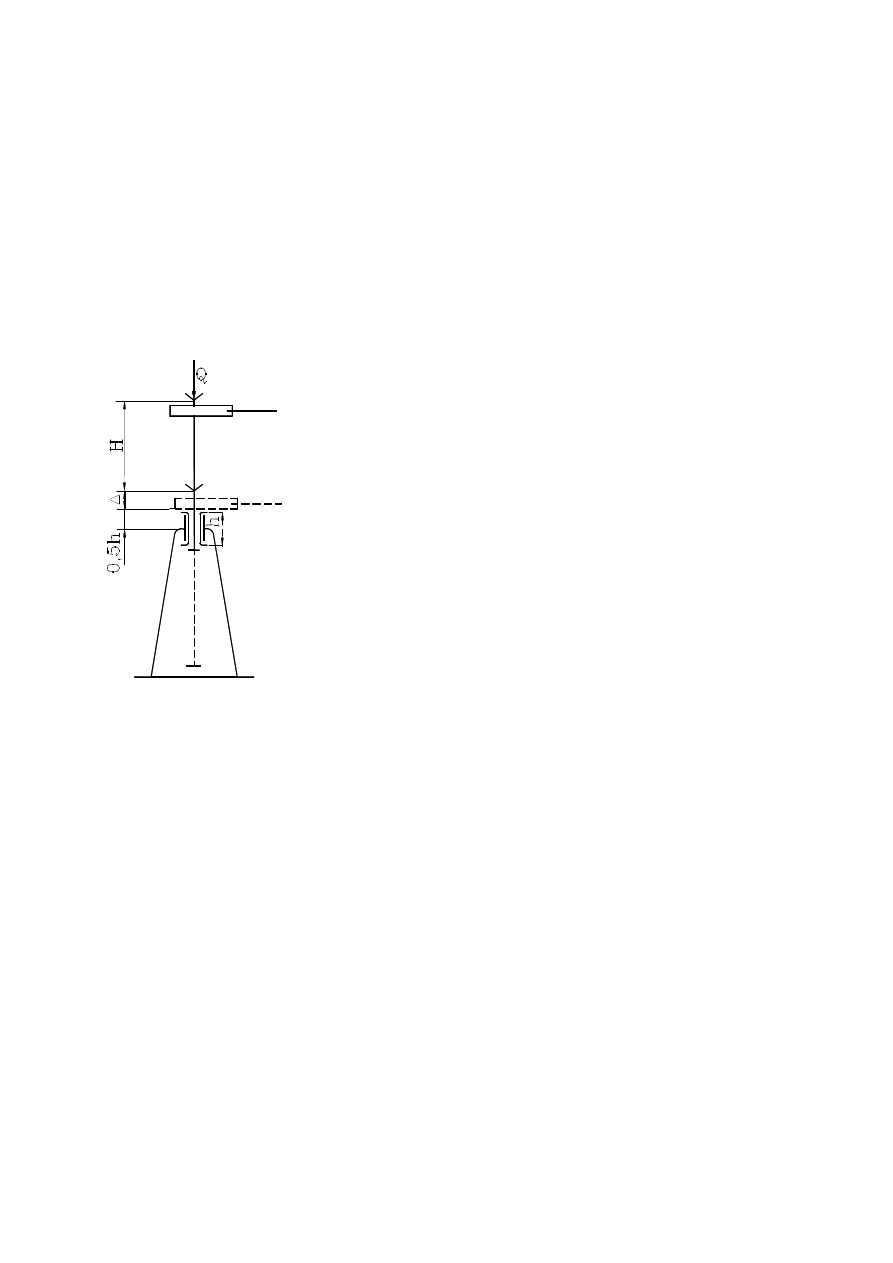
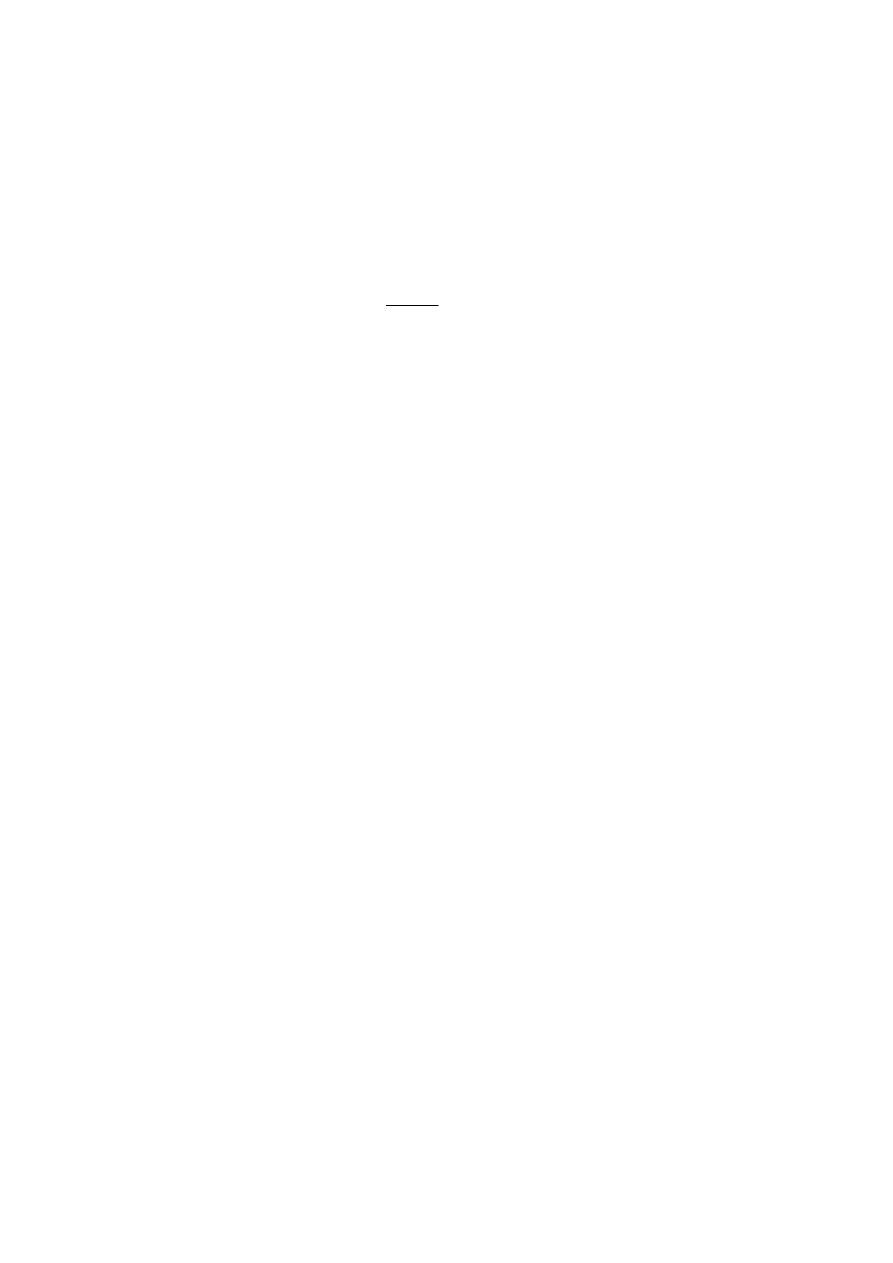
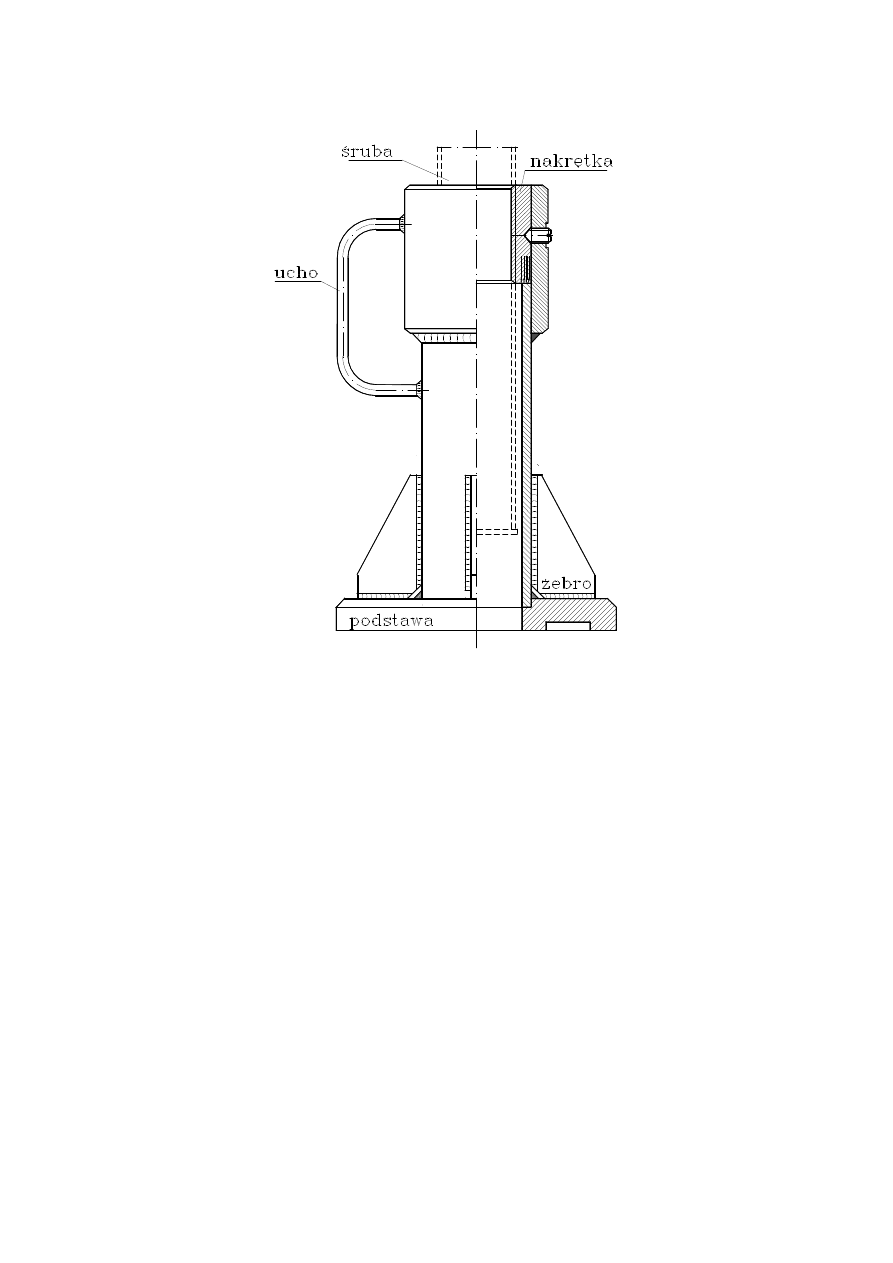
Zadaniem projektującego będzie zaprojektowanie podnośnika, którego schemat
konstrukcyjny pokazano na rys. 12.
Oznaczenia:
Q - ciężar podnoszony [N],
M
c
- moment potrzebny do podniesienia ciężaru Q - [Nmm],
M
t
- moment tarcia w głowicy [Nmm],
M
s
- moment skręcający śrubę w czasie podnoszenia ciężaru [Nmm].
1. Cel pracy
Celem niniejszego projektu jest zapoznanie się ze sposobem projektowania i
obliczania podstawowych elementów maszyn jak:
•
połączenia śrubowego przenoszącego obciążenia w ruchu,
•
obliczania drąga napędzającego śrubę ,
•
zagadnień kontaktowych
oraz sposobu wymiarowania i tolerowania części wchodzących w skład podno-
ś
nika śrubowego. Ponadto projektujący zapoznaje się z doborem materiałów
i dopuszczalnych naprężeń przy obliczaniu elementów, które często wchodzą
w skład bardziej złożonych konstrukcji. Projektujący poznaje w jaki sposób bu-
dować urządzenie, które ma spełniać założone zadania.
Ze względów dydaktycznych wybrano do projektowania konstrukcję pod-
nośnika w skład, której wchodzą elementy, których obliczenia omówiono w I
części wykładów PKM.
2. Założenia do projektu
•
Podnośnik śrubowy z napędem śruby przy pomocy drąga, pracujący piono-
wo,
•
zaopatrzony w głowicę, która ma zapewnić m.in. niezależny obrót śruby
względem podnoszonego ciężaru,
•
praca podnośnika na podłożu o twardości minimum drewna,
•
wymagana jest łatwość montażu i demontażu,
•
konstrukcja prosta, składająca się z minimalnej ilości części prostych techno-
logicznie do wykonania,
•
w projekcie wykorzystać części znormalizowane.
2
3. Wymagania
♦
Kompletne obliczenia wraz ze szkicami elementów i zespołów podnośnika,
♦
Rysunek zestawieniowy całości konstrukcji z wymiarami gabarytowymi,
pasowaniami, wykonany w systemie AUTOCAD
♦
rysunki warsztatowe wskazanych części,
♦
znajomość zagadnień wiążących się z tematem pracy projektowej.
4. Dane do projektu
Q - maksymalny ciężar podnoszony [N],
H - wysokość podnoszenia [mm],
h - orientacyjna wysokość nakrętki [mm].
Rys.12. Schemat podnośnika
3
5. Obliczenia śruby
W zależności od przeznaczenia podnośnika, śruba może pracować na ściskanie
( siła Q obciąża śrubę osiowo), lub na zginanie ze ściskaniem ( siła Q działa pod
kątem
α
do osi śruby).
Rozpatrzmy obydwa przypadki obliczania śruby z warunku na stateczność.
5.1. Siła Q działa w osi śruby
W czasie obciążenia siłą osiową, w śrubie jako
elemencie smukłym może dojść do utraty stateczności
(podstawowej postaci równowagi) i utworzenia się
nowej postaci, której towarzyszą zazwyczaj duże od-
kształcenia i naprężenia. Aby nie nastąpiła utrata sta-
teczności podstawowej, śrubę liczymy z warunku na
wyboczenie.
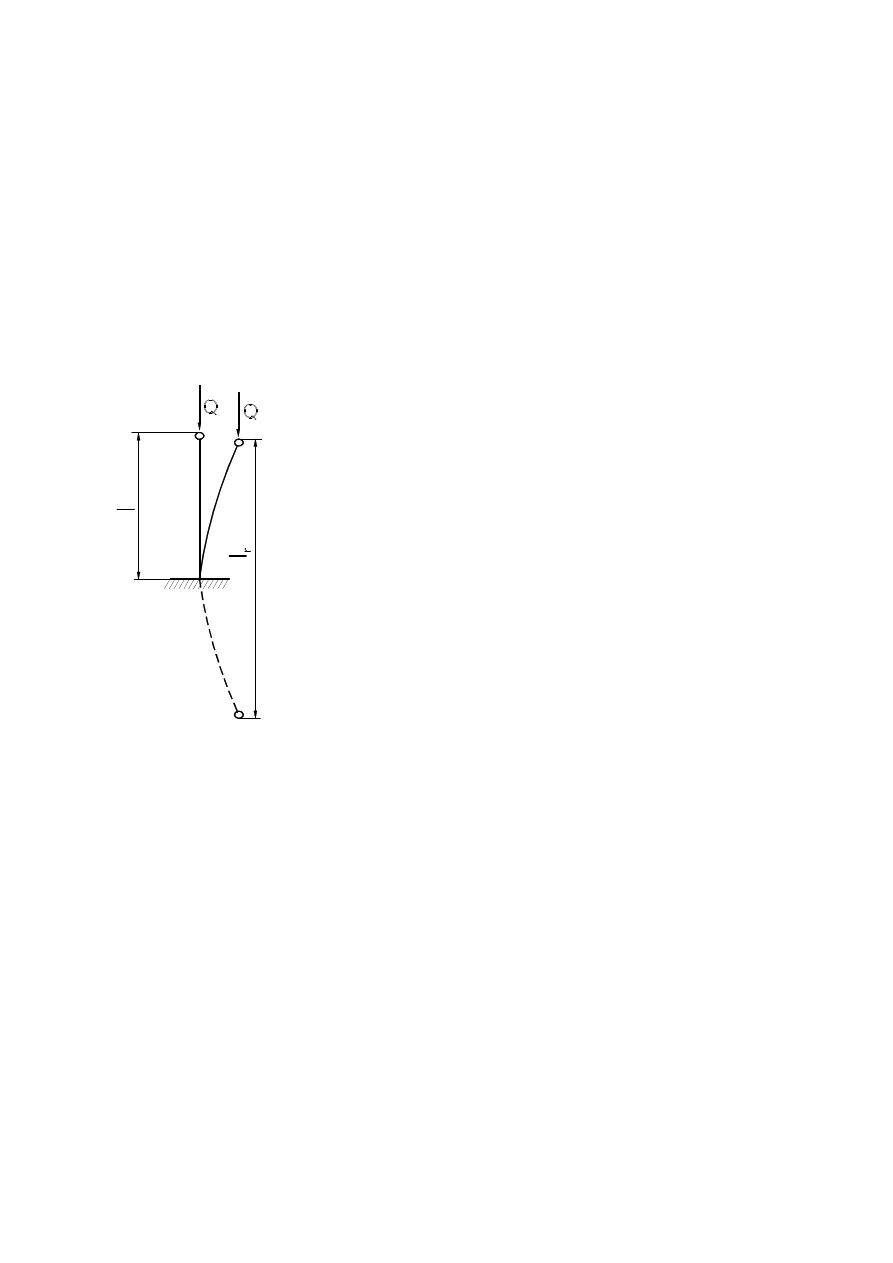
Dla podnośnika przedstawionego schematycz-
nie na rys.12 przyjmujemy schemat zamocowania
ś
ruby pokazany na rys.13 .
W rzeczywistości śruba w nakrętce nie jest zamoco-
wana sztywno jak przyjęto na rys.13. Błąd schematy-
zacji korygujemy przyjmując dość duży współczyn-
nik bezpieczeństwa x przy obliczaniu średnicy śruby.
Rys. 13. Schemat
zamocowania śruby
Dla podnośników zwykłych przyjmujemy
x = 4
÷
6,
dla podnośników teleskopowych x = 6
÷
8.
Długość zredukowana
l
r
=
β
l , gdzie
β = 2
l - długość śruby podlegająca wyboczeniu.
Zgodnie z rys.12
l = H + 0,5 h +
∆
, (1)
gdzie:
∆
- suma wysokości mechanizmu zapadkowego i części śruby wchodzącej w
otwór głowicy.
4
W rozwiązaniach podobnych konstrukcyjnie do projektowanego podnośnika
można przyjąć
∆
= (1,2
÷
1,5) h
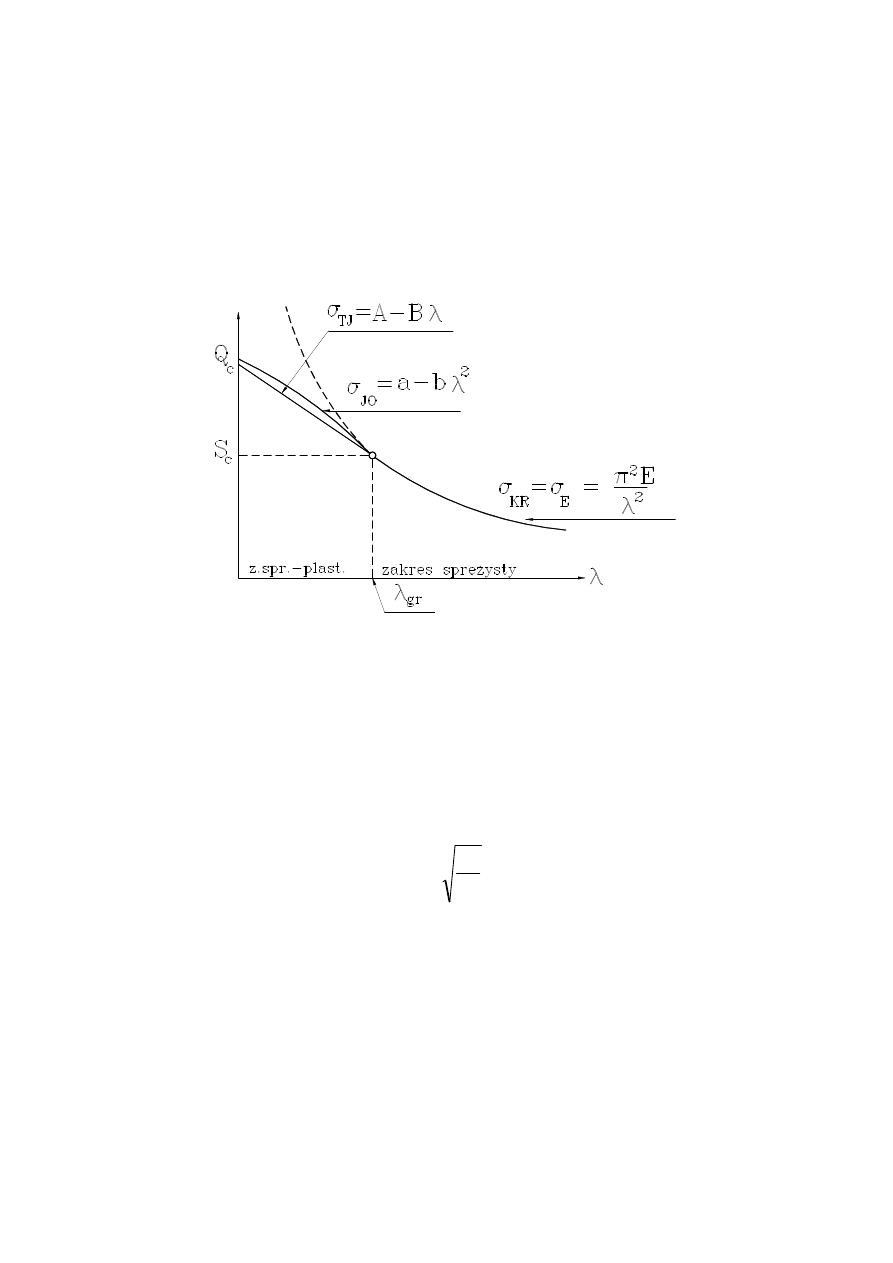
5.1.1 Określenie zakresu wyboczenia
Rys. 14 Wykres wyboczenia ; sprężystego - hiperbola Eulera.
sprężysto-plastycznego - krzywa Johnsona Ostenfelda i prosta Tetmajera-
Jasińskiego.
Zakres wyboczenia na rys.14 rozgraniczony jest smukłością graniczną
λ
gr
Dla
λ
≥
λ
gr
- zakres sprężysty,
dla
λ
<
λ
gr
- zakres sprężysto-plastyczny, gdzie
λ
gr
c
E
S
=
, (2)
S
c
- granica proporcjonalności przy ściskaniu [N/mm
2
]
Zakres wyboczenia można określić również za pomocą długości Eulerowskiej.
Dla
l
r
≥
l
E
- zakres sprężysty,
l
r
< l
E
- zakres sprężysto-plastyczny, gdzie długość Eulerowska
5
l
E
Qx
E
gr
=
λ
π
2
3
1
4
[mm] (3)
W zakresie sprężystym do wymiarowania śruby wykorzystamy wzór Eu-
lera, natomiast w zakresie sprężysto-plastycznym wzór Johnsona Ostenfelda.
Dla obydwu zakresów warunek bezpieczeństwa można zapisać jednolicie w po-
staci
Q
F
k
x
w
kr
1
≤
=
σ
, (4)
gdzie F
1
- pole przekroju rdzenia śruby [mm
2
],
k
w
- naprężenie dopuszczalne na wyboczenie zależne od smukłości
λ
.
5.1.2 Zakres sprężysty - wzór Eulera
Naprężenia krytyczne
σ
σ
π
λ
kr
E
E
=
=
2
2
(5)
uwzględniając, że
λ
ξ
2
2
2
2
1
=
=
⋅
l
i
l
F
r
r
min
, (6)
warunek bezpieczeństwa przyjmie postać
Q x
F
EF
l
⋅ ≤
⋅
1
2
1
1
2
π
ξ
,
stąd
F
Q x
l
E
r
1
2
2
≥
⋅ ⋅ ⋅
ξ
π
.
Ponieważ dla przekroju kołowego
ξ
π
=
4
,
zatem średnica rdzenia śruby
d
Qxl
E
r
1
2
3
4
64
≥
π
. (7)
6
5.1.3 Zakres sprężysto-plastyczny - wzór Johnsona Ostenfelda
Naprężenie krytyczne
σ
σ
λ
kr
JO
a
b
=
= −
2
(8)
Uwzględniając (4)
2
2
w
B
A
x
b
x
a
k
λ
−
≡
λ
−
=
(9)
Stałą „a” wyznacza się z warunku, by dla
λ
= 0 parabola Johnsona Ostenfelda
przechodziła przez punkt
σ
= Q
c
(Q
c
- granica plastyczności przy ściskaniu).
Stałą „b” można wyznaczyć dwoma sposobami:
•
żą
dając styczności paraboli JO i hiperboli E, co daje pewien punkt styczności
odpowiadający smukłości
λ
t
, dla realnych materiałów na ogół większej od
smukłości granicznej
λ
gr
- oryginalny sposób JO.
•
żą
dając jedynie zgodności wartości naprężeń krytycznych na granicy zakre-
sów (dla
λ
=
λ
gr
) co ma z kolei tę niedogodność, że wzór JO może dawać w
pewnym zakresie smukłości wartości krytyczne nieco większe niż wynikające
ze wzoru Eulera.
W praktycznych obliczeniach wygodnie jest wyznaczać bezpośrednio stałe A i
B różnicując przy tym wartości współczynnika bezpieczeństwa dla zakresu ma-
łych smukłości, w którym decyduje warunek wytrzymałościowy (współczynnik
bezpieczeństwa x
c
dla ściskania) oraz dla zakresu wyboczenia (x > x
c
). Przy ta-
kim podejściu różnice między dwoma sposobami wyznaczania stałych we wzo-
rze JO są niewielkie.
Przyjmując sposób drugi otrzymamy
•
dla
λ
= 0,
k
k
Q
x
w
c
c
c
=
=
- dla obciążeń statycznych
(10)
lub
k
k
Z
x
w
cj
cj
cj
=
=
- dla obciążeń jednostronnie zmiennych
(11)
•
dla
λ
=
λ
gr
, stąd
A = k
c,
B
k
k
c
E
gr
=
−
λ
2
(13)
Warunek bezpieczeństwa ma tutaj postać
Q
F
k
k
k
c
c
E
gr
1
2
2
≤
−
−
λ
λ
.
(14)
7
Uwzględniając (6) otrzymamy
Q
F
k
k
k
l
F
c
c
E
gr
r
1
2
2
1
≤ −
−
⋅
⋅
λ
ξ
.
(15)
Stąd przekrój rdzenia śruby
F
Q
k
k
k
k
l
c
c
E
c
r
gr
1
2
≥
+
−
ξ
λ
(16)
Ponieważ dla przekroju kołowego
ξ
= 4
π
, średnica rdzenia śruby
2
gr
r
c
E
c
c
1
l
k
k
k
4
k
Q
2
d
λ
−
+
π
≥
.
(17)
5.2 Śruby ściskane i zginane
W przypadku nieosiowego obciążenia siłą Q, śrubę należy obliczać z warunku
stateczności z uwzględnieniem zginania. Najprostsze wzory obliczeniowe dla
tego przypadku obciążenia oparte są na tzw. metodzie współczynnika zmniej-
szającego i sprowadzają się do warunku bezpieczeństwa w postaci:
k
k
M
W
P
F
k
c
g
g
v
c
+
≤
ψ
1
,
(18)
gdzie M - maksymalny moment zginający
M = P
h
l ,
W
d
=
π
1
3
32
- wskaźnik zginania przekroju rdzenia śruby,
( )
ψ
ψ λ
≡
=
k
k
w
c
- współczynnik wyboczeniowy zależny od smukłości.
8
Wykorzystanie tego wzoru do bezpośredniego oblicza-
nia średnicy śruby jest kłopotliwe (konieczna jest tu me-
toda iteracji). Dlatego w praktyce łatwiej jest go stoso-
wać jako warunek sprawdzający, względnie przy obli-
czaniu średnicy wykorzystując metodę kolejnych przy-
bliżeń. Współczynnik wyboczeniowy można przyjmo-
wać wg normy PN-76/B-03200, gdzie podano go w
formie tablicy w funkcji sztywności.
W obliczeniach można też przyjąć k
g
= k
c
(przyjęcie na
korzyść pewności obliczeń). Korzystając z wzoru (18)
dla przyjętej zgodnie z normą śruby można określić tak-
ż
e dopuszczalny z warunku wytrzymałościowego Q =
f(
α
,l) w funkcji wysokości podnoszenia zgodnie z (1),
gdzie 0
≤
α ≤
α
g
.
Rys. 15. Schemat podnośnika obciążonego
siłą odchyloną od pionu o dopuszczalny kąt
α
g
.
Po obliczeniu średnicy rdzenia śruby, przyjmujemy gwint trapezowy niesyme-
tryczny wg PN-65/M-02019.
Oznaczenie przyjętego gwintu SdxP, np. S40x6 .
Wymiary gwintu i nakrętki wpisujemy do tabeli.
Śruba
Skok
Nakrętka
ś
rednica
F
1
d
2
=D
2
ś
rednica
gwintu
rdzenia
P
D
1
D
d
d
1
Po przyjęciu wymiarów gwintu śruby i nakrętki sprawdzamy smukłość śruby
wg wzorów:
λ
=
l
i
r
, gdzie i - promień bezwładności (19)
9
i
J
F
=
; J - moment bezwładności
64
d
J
4
1
π
=
, stąd i
d
=
1
4
.
•
Jeżeli obliczone
λ
określa zakres, w którym liczyliśmy śrubę, obliczenia na
wyboczenie uważamy za zakończone.
•
Jeżeli
λ
określa zakres przeciwny należy dla tego zakresu przeprowadzić ob-
liczenia z warunku na wyboczenie.
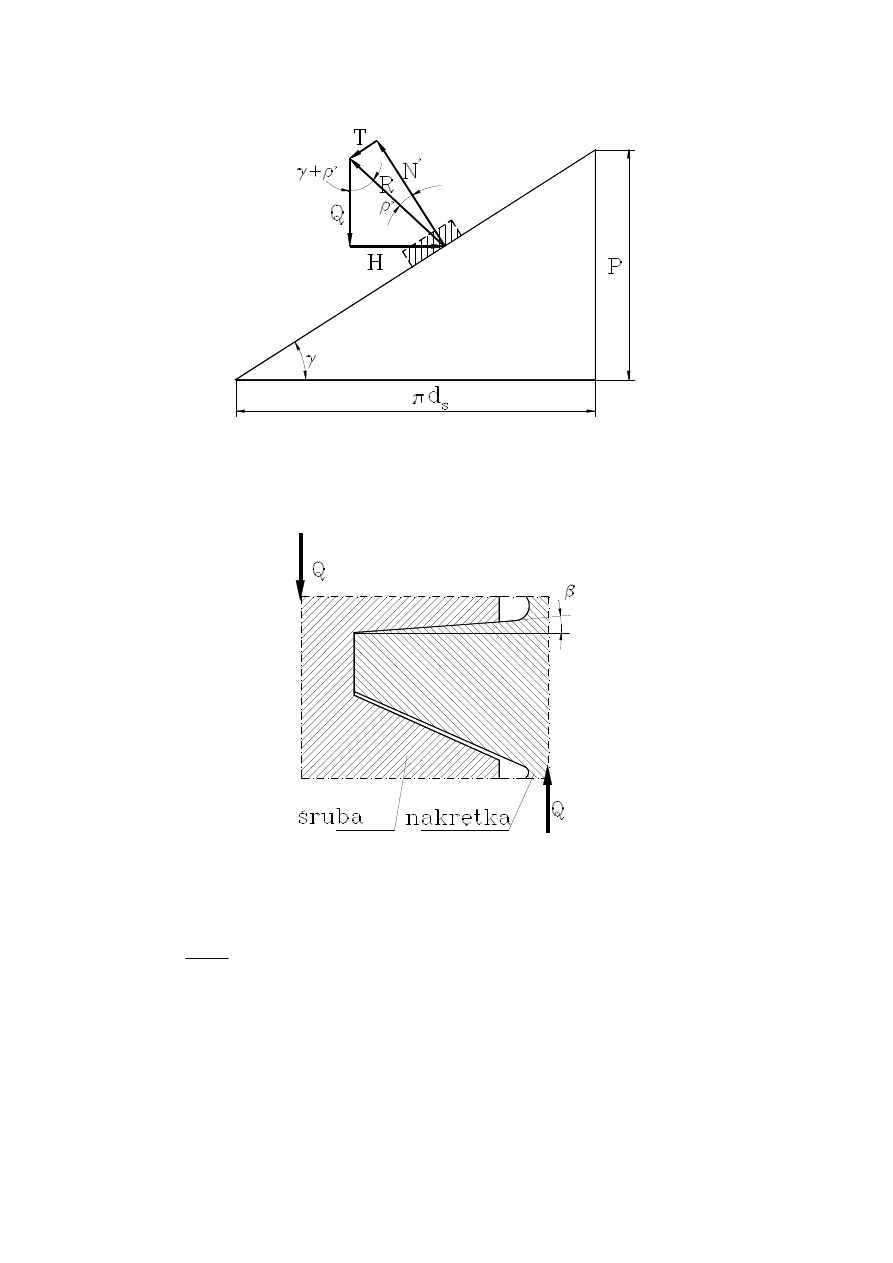
6. Moment skręcający śrubę przy podnoszeniu ciężaru
Szczegółową analizę sił w obciążonej śrubie oraz pełny opis podano w [8]
Na rys.16 pokazano schematycznie rozkład sił na średniej średnicy współpra-
cy śruby z nakrętką d
s
,gdzie
d
D
d
s
=
+
1
2
,
(
)
H
Q tg
= ⋅
′ +
ρ
γ
,
gdzie
γ
- kąt pochylenia linii śrubowej gwintu,
P
h
- skok gwintu,
s
h
d
P
tg
⋅
π
=
γ
ρ
’ - pozorny kąt tarcia gwintu śruby i nakrętki,
H - siła obracająca nakrętkę przyłożona na średniej średnicy d
s
.
10
Rys. 16. Rozkład sił na średniej średnicy współpracy gwintu śruby i nakrętki
Rys.17. Kąt pochylenia ścianki nośnej gwintu
′ =
ρ
µ
β
artg
cos
, gdzie
β=3
0
- kąt pochylenia ścianki nośnej gwintu (rys. 17).
Należy przyjąć współczynnik tarcia µ=0,1 (dla tarcia półsuchego).
Moment skręcający śrubę w czasie podnoszenia ciężaru Q
(
)
γ
+
ρ′
⋅
⋅
=
tg
Qd
5
,
0
M
s
s
(20)
11
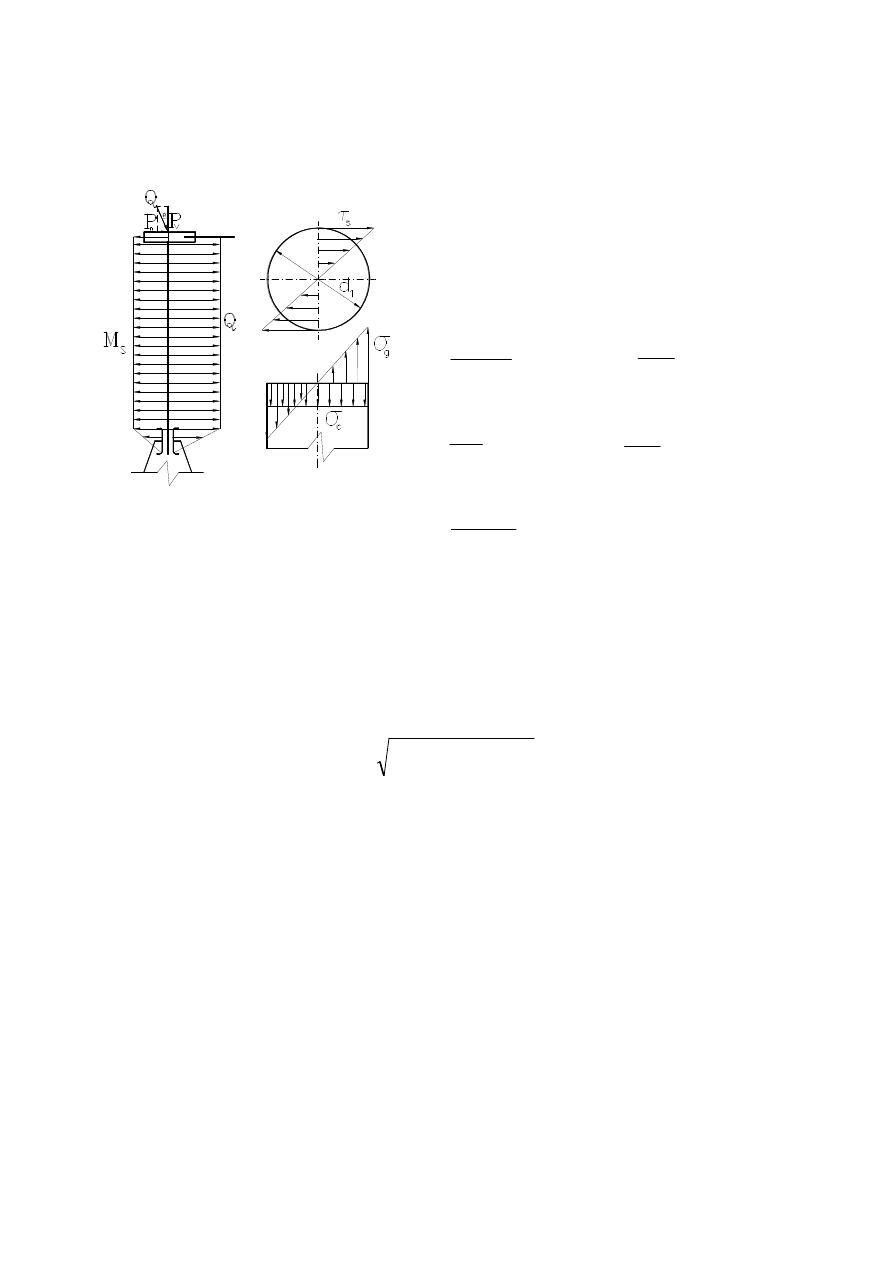
7. Sprawdzenie naprężeń zastępczych w śrubie.
Schemat obciążenia śruby, oraz rozkład na-
prężeń w przekroju rdzenia pokazano na
rys.18.
Naprężenia ściskające
σ
α
c
Q
F
=
cos
1
, gdzie
F
d
1
1
2
4
=
π
.
Naprężenia skręcające
τ
s
s
o
M
W
=
, gdzie
W
d
o
=
π
1
3
16
.
Naprężenia gnące
σ
α
g
g
Ql
W
=
sin
.
Rys18. Wykres obciążenia śruby i rozkład
naprężeń w rdzeniu.
Ponieważ amplituda zmian naprężeń w śrubie jest minimalna, naprężenia za-
stępcze można obliczyć ze wzoru Hubera
(
)
σ
σ
σ
τ
z
c
g
s
c
k
=
+
+
≤
2
2
3
(21)
12
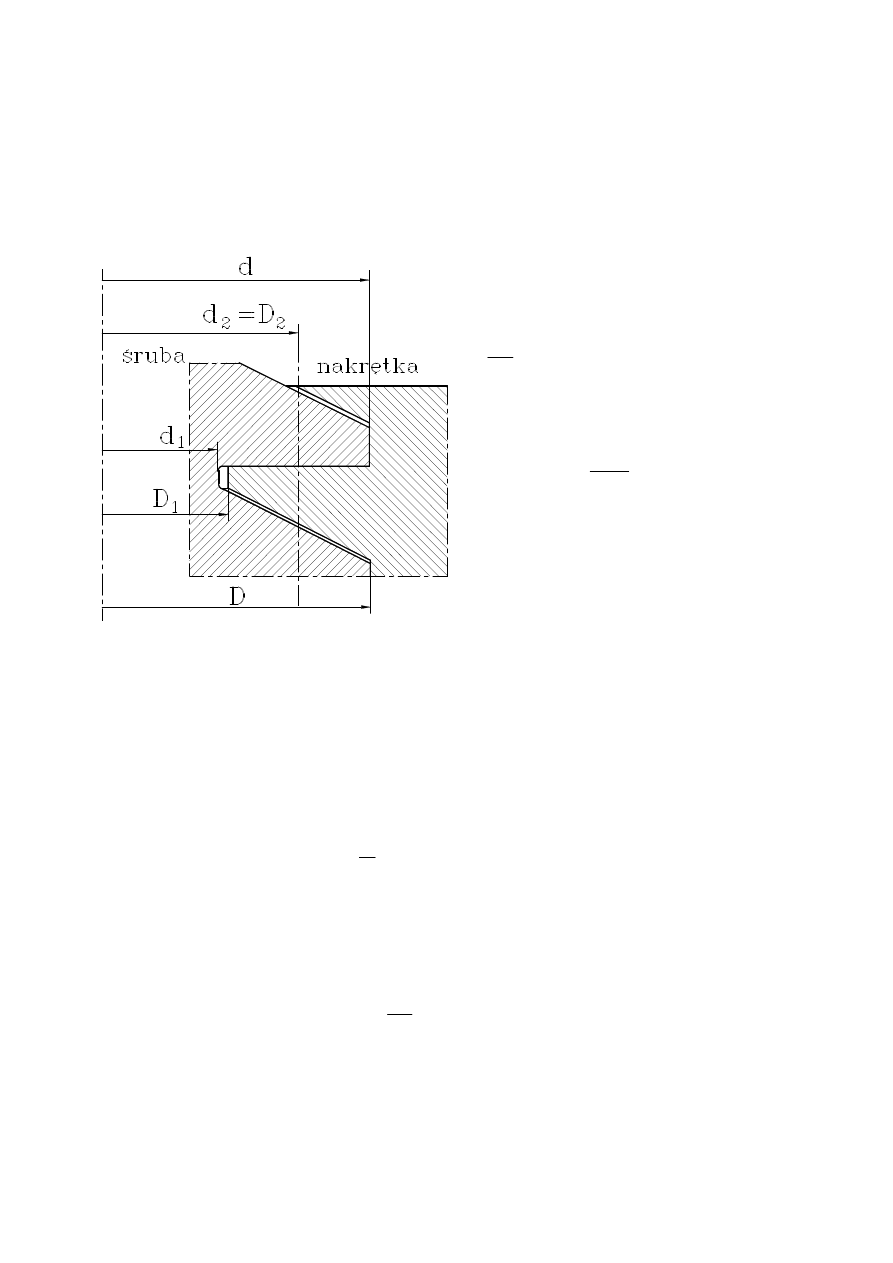
8. Obliczenia nakrętki
8.1. Wymagana całkowita powierzchnia zwojów
Z warunku na docisk powierzch-
niowy
Q
F
p
c
dop
≤
.
Stąd F
Q
p
c
dop
≥
. (22)
Rys.19 Przekrój przez gwint śruby i nakrętki
8.2. Powierzchnia współpracy jednego zwoju
gwintu
(
)
F
d
D
=
−
π
4
2
1
2
(23)
8.3 Obliczeniowa ilość zwojów nakrętki
i
F
F
o
c
≥
.
(24)
8.4 Całkowita wysokość nakrętki
H
n
≥
i
o
P.
(25)
13
Aby zapewnić dobre prowadzenie śruby w nakrętce przyjmujemy
H
n
≥
(1
÷
1,5) d. (26)
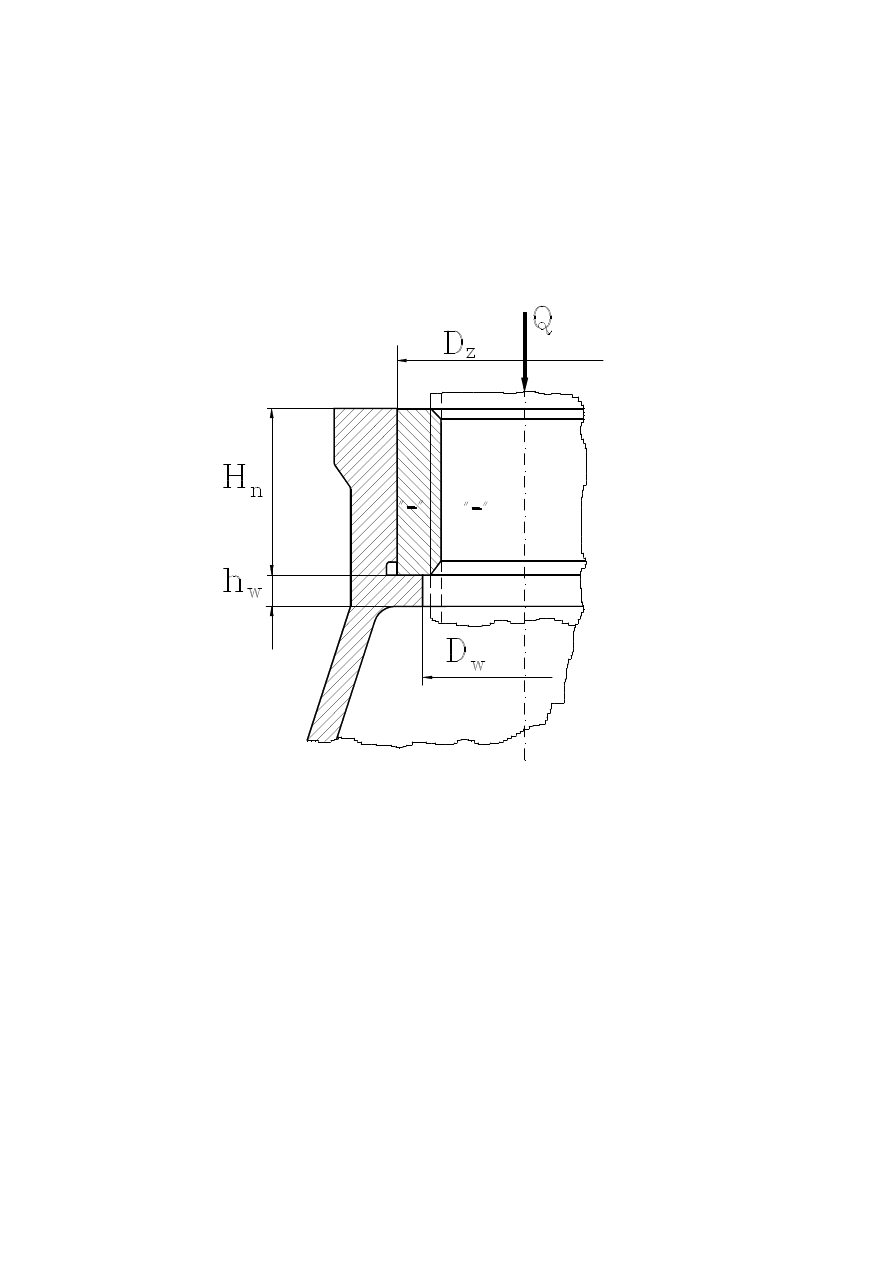
Zabudowa nakrętki w korpusie powinna zapewnić jednoimienny znak naprężeń
w obszarze współpracy śruby i nakrętki (rys. 20)
Rys. 20. Zabudowa nakrętki w korpusie
Przy tym założeniu oraz przyjęciu jednakowej podatności śruby i nakrętki moż-
na zrealizować możliwie równomierny rozkład nacisków na zwojach gwintu.
Oznaczając:
k
1
- jednostkowa podatność śruby,
14
k
2
- jednostkowa podatność nakrętki
k
E F
1
1
1
1
=
,
k
E F
2
2
2
1
=
(27)
Przyjmując
k
1
= k
2
otrzymamy
F
E
E
F
2
1
2
1
=
,
oraz
D
F E
E
D
z
=
+
4
1
1
2
2
π
(28)
Ś
rednicę D
w
liczymy z warunku na docisk powierzchniowy przyjmując
P
dop
≈
0,8 k
cj
Wysokość kołnierza h
w
liczymy z warunku na ścinanie.
tj
z
w
k
D
Q
h
⋅
π
≥
′
.
h
w
= 1,5 h
w
’
Warto
ść
h
w
przyjmujemy wi
ę
ksz
ą
ze wzgl
ę
du na zginanie wyst
ę
puj
ą
ce w koł-
nierzu. Wielko
ść
t
ę
liczy si
ę
tylko dla korpusów odlewanych.
15
9. Głowica podnośnika
Rys.21. Głowica podnośnika
Głowica w tym rozwiązaniu konstrukcyjnym podnośnika ma spełniać następu-
jące zadania:
•
w czasie pracy podnośnika zmniejszyć tarcie między śrubą a elementem pod-
noszonym,
•
uniezależnić obrót śruby od podnoszonego ciężaru.
Powyższe wymagania spełniają płytki głowicy pokazane na rys. 21.
9.1 Obliczenia średnicy d
1
płytki górnej
Ś
rednicę d
1
płytki górnej liczymy z warunku na docisk
Q
F
p
dop
≤
, gdzie p
k
dop
cj
≅
(29)
F
d
F
o
=
−
π
1
2
4
,
16
F
o
- powierzchnia przekroju otworu na wkręt (np. dla M5) (30)
9.2 Pozostałe średnice przyjmujemy konstrukcyjnie
d
2
= 0,8 d
0
,
d
3
= 0,8 d
2
, (31)
d
4
= (1,6
÷
2,0) d
0
,
gdzie
d
0
- średnica zewnętrzna gwintu lub średnia średnica gwintu d
s
.
9.3 Obliczanie promieni krzywizn płytek głowicy
Promień odkształconej powierzch-
ni przy współpracy płytek
a
Q
p
sr
=
π
(32)
p
p
sr
≅
2
3
max
(33)
Rys.22 Współpraca płytek głowicy
Jeśli materiał płytek jest idealnie sprężysty, zgodnie z założeniem Hertza naci-
ski maksymalne dopuszczalne są proporcjonalne do twardości płytek. Zgodnie z
tym założeniem możemy przyjąć
p
max
≈
(C
HB
HB) [N/mm
2
], gdzie C
HB
≈
2
÷
3,
lub
(34)
17
p
max
≈
C
HRC
H
RC
[N/mm
2
], gdzie C
HRC
≈
20
÷
30,
Twardość Brinella HB [daN/mm
2
] (przyjmujemy wg tablicy).
Promień zastępczy współpracy kuli z czaszą kulistą obliczamy ze wzoru
1
1
1
1
2
r
r
r
z
=
−
. (35)
Promień zastępczy jest to promień jaki powinna mieć kula przy współpracy z
płaszczyzną, aby przy działającej sile odkształcenia powierzchni styku miały
jeszcze charakter sprężysty.
Wartość tego promienia wynosi
r
aE
p
z
sr
=
4 28
,
. (36)
Znając r
z
z (36) , należy przyjąć np. r
1
= d
2
,
a ze wzoru (35) obliczyć promień r
2
1
z
z
1
2
r
r
r
r
r
−
⋅
=
.
9.4. Obliczenie grubości głowicy
Rys. 23 Schemat głowicy Rys. 24 Schemat obliczeniowy głowicy
Płytę głowicy traktujemy jako kołowo-symetryczną obciążoną na brzegu (na
ś
rednicy d
4
) rozłożonym obciążeniem Q i podpartą na płytce o średnicy d
1
18
(rys.23). Konstrukcja głowicy pozwala z pewnym błędem (na korzyść pewności
obliczeń) przyjąć schemat obliczeniowy pokazany na rys.24.
Ponieważ w środku płyty r = 0 i na promieniu r = d
4
/2 występują największe
naprężenia, zatem na tych średnicach obliczymy wymaganą grubość płyty gło-
wicy.
Dla r = 0 grubość płyty głowicy powinna wynosić
g
Q
k
r
1
2
0 62
1
2
′ ≥
+
,
ln
β
β
, (37)
dla
r
d
=
4
2
g
Q
k
r
1
2
0 425
1
2
″ ≥
−
,
β
. (38)
Grubość płyty głowicy
g
1
= max ( g
1
′
,
g
1
″
).
9.5. Obliczanie grubości płytek
Rys.25. Schemat obciążenia płytki górnej.
Traktując płytkę górną jak płytę kołowo-symetryczną obciążoną jak na rys.25
obliczymy jej grubość ze wzoru
(
)
[
]
g
Q
k
r
2
2
0 478
1 3
0 15 1
≥
+
−
−
,
, ln
,
δ
δ
. (39)
19
gdzie
δ
=
d
a
1
2
.
Grubość płytek g
2
i g
3
przyjmujemy z warunku konstrukcyjnego.
Grubość płytki górnej
g
2
≥
0,2 d
2
Grubość płytki dolnej
g
3
≥
0,3 d
3
.
9.6 Moment tarcia między płytkami
M
Qa
T
=
2
3
µ
. (40)
10. Moment całkowity potrzebny do podniesienia ciężaru Q
M
M
M
c
s
T
=
+
(41)
11. Sprawność śruby
η
=
L
L
u
w
, (42)
gdzie L
u
- praca użyteczna = QP
L
w
- praca włożona = 2
π
M
c
.
12. Obliczenia drąga (ramienia napędowego)
a) Obliczenia wymiarów drąga
d – średnica nominalna śruby (wg oznaczenia SdxP)
Ś
rednica drąga: d
dr
= 0,8 d
Długość drąga l
r
:
r
c
dr
P
M
l
=
,

20
Gdzie: Mc – całkowity moment napędowy,
P
r
– dopuszczalna siła dla ręki = 250 do 300 N.
b) obliczenia wymiarów nasady (gniazda draga):
Ś
rednica zewnętrzna nasady d
c
d
c
= 1,5 d
Długość nasady l
c
l
c
=1,5 d
dr
c) Sprawdzenie wytrzymałości drąga
Naciski maksymalne na brzegu nasady (dla rozkładu trójkątnego nacisków)
cj
dop
dr
2
c
c
max
k
8
,
0
p
d
d
M
6
p
⋅
=
≤
⋅
⋅
=
Naprężenia gnące w przekroju niebezpiecznym drąga
M
g
=P
r
(l
dr
-0,5d
c
)
32
d
W
3
dr
g
⋅
π
=
gj
g
g
g
k
W
M
≤
=
σ
13. Korpus odlewany

21
Korpus odlewany będziemy projektować głównie przy produkcji seryjnej
lub masowej. Minimalna grubość ścianek korpusu g
s
zależy od gatunku żeliwa,
sposobu odlewania i wynosi od 3
÷
5 [mm]. Zależy też od wielkości odlewu. W
przypadku projektowanego podnośnika grubość ścianki można przyjąć
g
s
≈
(0,01
÷
0,02) H
k,
grubość podstawy
g
p
≈
1,5 g
s
,
grubość żebra
g
z
= ( 0,6
÷
1) g
s
,
wysokość żebra
H
z
> 5 g
z
.
Projektując korpus odlewany należy zadbać o łagodne przejścia krawędzi ze
względu na powstające naprężenia skurczowe podczas stygnięcia odlewu.
Krawędzie utworzone przez połączenie ścian należy zastępować przejściem łu-
kowym o promieniu odpowiednio dobranym do grubości ścian. Ostre krawędzie
lub przejścia są przyczyną powstania jam lub pęknięć wywołanych wytwarza-
niem się krystalitów. Optymalne stosunki wymiarów przejść podano w [1].
22
Rys. 33. Korpus odlewany
13.1 Obliczanie wymiarów korpusu
Przy obliczaniu wysokości korpusu wychodzimy z założenia, że śruba
powinna całkowicie mieścić się w korpusie i nie powinna dotykać podłoża przy
całkowicie skręconym podnośniku. Luz pomiędzy śrubą a podłożem powinien
wynosić
∆
2
= (10
÷
20) [mm].
Przy większych podnośnikach należy przewidzieć ucho do przenoszenia. Wy-
miary „a” i „b” dostosować do wymiarów dłoni.
23
Rys.34. Szkic do obliczania wymiarów korpusu
Średnicę podstawy D
p
obliczamy przy założeniu, że siła Q przyłożona do gło-
wicy pod kątem
α
nie przechodzi poza obrys podstawy.
Stąd D
p
= 2 (H
k
+ l
k
+ h
gł
+ H ) tg
α
g
,
(60)
gdzie h
gł
- wysokość głowicy.
Szerokość podstawy b liczymy z warunku na docisk przyjmując, że podnośnik
w czasie pracy spoczywa na podłożu o twardości minimum drewna.
Q
F
p
p
dop
≤
, (61)
gdzie F
p
- powierzchnia podstawy podnośnika.
Jeżeli szerokość podstawy b
≥
( 4
÷
5) g
p
(62)
24
należy stosować żebra usztywniające podstawę w stosunku do ścianki korpusu.
Grubość żebra nie powinna być większa od grubości ścianki korpusu.
Powierzchnię pierścienia ograniczoną średnicami D
z’’
i D
w
sprawdzamy z wa-
runku na docisk powierzchniowy
F
Q
k
cj
≥
0 8
,
. (64)
14. Korpus spawany
Korpus spawany b
ę
dziemy projektowa
ć
dla produkcji jednostkowej lub
małoseryjnej. Przy projektowaniu korpusu nale
ż
y stosowa
ć
znormalizowane
półfabrykaty jak rury, blachy itp. Rury bez szwu (kotłowe) przyjmowa
ć
wg -
PN-85/H-74252
Jako materiał stosowa
ć
stal konstrukcyjn
ą
zwykłej jako
ś
ci
S185, S235JR, E275A
Główne wymiary nale
ż
y liczy
ć
jak w przypadku korpusu odlewanego. Grubo
ść
ś
cianki rury no
ś
nej obliczy
ć
z warunku na docisk na powierzchni styku z na-
kr
ę
tk
ą
. Dopuszczalne naciski przyjmowa
ć
w stosunku do materiału o mniejszej
twardo
ś
ci.
p
dop
= 0,8 k
cj.
(65)
25
Rys. 35. Korpus spawany
15. Literatura
[1] Dietrych J., Kocańda S., Korewa W.: Podstawy konstrukcji maszyn, cz. I.
Warszawa WNT 1973.
[2] Korewa W., Zygmunt K.: Podstawy konstrukcji maszyn, cz. II. Warszawa
WNT 1973.
[3] Łysakowski E.: Podstawy konstrukcji maszyn - Ćwiczenia konstrukcyjne.
PWN Warszawa 1974.

26
[4] Moszyński W.: Wykład elementów maszyn, t.I. PWT Warszawa 1955.
[5] Podstawy konstrukcji maszyn (pod red. M. Dietricha), tom 2. WNT War-
szawa 1955.
[6] Ryś J., Skrzyszowski Z.: Podstawy konstrukcji maszyn. Zbiór zadań. Cz.1.
Skrypt.Wydawnictwo Politechniki Krakowskiej. Kraków 1993.
[7] Ryś J., Skrzyszowski Z.: Podstawy konstrukcji maszyn. Zbiór zadań. Cz.2.
Skrypt.Wydawnictwo Politechniki Krakowskiej. Kraków 1992.
[8] Laboratorium Podstaw konstrukcji maszyn. Praca zbiorowa pod red. J. Rysia
i A. Trojnackiego. Skrypt.Wydawnictwo Politechniki Krakowskiej. Kraków
1994.
[9] śukowski S.: Sprężyny. PWT Warszawa 1955.

27
Wyszukiwarka
Podobne podstrony:
Podnośnik śrubowy rysunek złożeniowy
Projekt podnośnika śrubowego PKM
Podnośnik śrubowy
Projekt podnośnika śrubowego
podnośnik srubowy, PROJEKT PKMzzzzzzzzzzzzzz, Dane
Podnośnik śrubowy (obl.)(A.S.), 1
Projekt podnośnika śrubowego, Mechanika i budowa maszyn, PKMY, Projekt podnosnika
Podnośnik śrubowy, rysunek złożeniowy
Podnośnik śrubowy, rysunek koncepcyjny
Podnośnik śrubowy obliczenia
Podnośnik śrubowy przykład z neta
PODNOŚNIK ŚRUBOWY 2, Studia, PKM
projekt1 podnosnik srubowy, ZiIP, inne kierunki, politechnika, sem IV, PKM, Projekty PKM, Projekty P
PKM-II(obliczeniania) - podnośnik śrubowy, POLITECHNIKA W-W, PKM
Podnosnik srubowy obliczenia id 399352
Podnośnik śrubowy obliczenia
algorytm obliczen podnosnika srubowego 2013 04 07
Zaprojektować podnośnik śrubowyQ=10 H=400mm
więcej podobnych podstron