
L
ABORATORIUM FIZYCZNE
Instytut Fizyki Politechniki Krakowskiej
Obliczanie i wyrażanie niepewności pomiaru
wersja podstawowa
opracował: Jan Kurzyk

2
Spis treści
1.
WPROWADZENIE
3
2.
BŁĄD POMIARU
4
2.1
Błędy przypadkowe
4
2.2
Błędy systematyczne
4
2.3
Błędy grube
5
3.
NIEPEWNOŚĆ POMIARU
5
3.1
Niepewność standardowa
6
3.2
Niepewność rozszerzona
6
4.
POMIARY BEZPOŚREDNIE I POŚREDNIE
6
5.
OBLICZANIE NIEPEWNOŚCI POMIARÓW BEZPOŚREDNICH
7
5.1
Obliczanie niepewności standardowej metodą A
7
5.2
Obliczanie niepewności standardowej metodą B
7
5.2.1
Opis ogólny
7
5.2.2
Obliczanie niepewności standardowej wynikającej z dokładności przyrządu pomiarowego
8
6.
SUMOWANIE SKŁADNIKÓW NIEPEWNOŚCI
9
7.
OBLICZANIE NIEPEWNOŚCI POMIARÓW POŚREDNICH
9
8.
ZAPIS WYNIKÓW POMIARÓW
10
8.1
Zaokrąglanie wyników
10
8.2
Formy podawania wyniku
10
8.3
Przykłady zaokrągleń i zapisów wyniku
12
9.
UŚREDNIANIE WYNIKÓW
12
10.
OPRACOWYWANIE WYNIKÓW POMIARU WIELKOŚCI ZALEŻNYCH
12
10.1
Graficzna prezentacja wyników
12
10.2
Regresja liniowa
13
11.
PRZYKŁADY OBLICZEŃ I ZAPISU WYNIKÓW POMIARU
15
LITERATURA
17

3
Obliczanie i wyrażanie niepewności pomiaru
Jan Kurzyk
1.
Wprowadzenie
W wielu dziedzinach nauki i techniki staramy się ilościowo opisywać zjawiska oraz cechy
badanych obiektów. W przypadku właściwości fizycznych zjawisk lub obiektów, do ich opisu używamy
tzw.
wielkości fizycznych
. Przykładowymi wielkościami fizycznymi są np. długość (jakiegoś obiektu),
czas (trwania jakiegoś zjawiska) czy natężenie prądu elektrycznego. Aby móc porównywać wielkości
fizyczne (tego samego typu) musimy im w sposób jednoznaczny przypisać wartości liczbowe. Liczby te
określają ile razy dana wielkość fizyczna jest większa (lub mniejsza) od jej
jednostki miary
, czyli
wielkości fizycznej (tego samego typu co wielkość mierzona), której umownie przypisaliśmy wartość
1. Proces mający na celu znalezienie wartości danej wielkości fizycznej (jako iloczynu liczby
określającej wartość tej wielkości fizycznej i jej jednostki miary) nazywamy
pomiarem
. W ogólności
wynik pomiaru jest tylko estymatą (oszacowaniem) wartości wielkości mierzonej. Dlatego podając
wynik pomiaru musimy podać jednocześnie ilościową informację o jakości podanego wyniku. Dopiero
wtedy będziemy mogli określić jego wiarygodność lub porównać z innym wynikiem. Miarą tej
wiarygodności jest wartość tzw.
niepewności pomiaru
, którą podajemy w tych samych jednostkach
miary, co wynik pomiaru. Wartość niepewności w połączeniu z wartością zmierzoną, pozwala nam
wyznaczyć przedział, w którym z określonym prawdopodobieństwem, nazywanym
poziomem ufności
mieści się rzeczywista wartość mierzonej wielkości. Należy podkreślić, że niepewność pomiaru nie
jest wielkością fizyczną i w związku z tym nie da się jej zmierzyć. Metodami wyznaczania niepewności
pomiaru zajmuje się tzw. teoria niepewności pomiaru. Ponieważ niepewność pomiaru nie może być
jednoznacznie zdefiniowana (gdyż nie jest to wielkość fizyczna), procedury wyznaczania niepewności
pomiaru w dużej mierze opierają się na międzynarodowych umowach. Metody określania
niepewności pomiaru opisywane przez teorię niepewności pomiaru nie ograniczają się jedynie do
fizyki. Stosowane są one we wszystkich dziedzinach nauki i techniki stosujących pomiar jako źródło
informacji. Zarówno procedury obliczania niepewności, jak i samo nazewnictwo stosowane w teorii
niepewności ewoluuje. Społeczność naukowa od dawna dążyła do ujednolicenia nazewnictwa i
metod wyznaczania niepewności pomiarów. W 1980 roku została powołana Grupa Robocza do spraw
Określania Niepewności. Wynikiem prac członków Grupy Roboczej, wytypowanych przez
Międzynarodowe Biuro Miar
1
, Międzynarodową Komisję elektrotechniczną
2
, Międzynarodową
Organizację Normalizacyjną
3
i Międzynarodową Organizacje Metrologii Prawnej
4
jest wydany w 1993
roku przez ISO dokument: Guide to the Expression of Uncertainty Measurement [1]. Dokument ten
zawiera zalecenia dotyczące wyrażania niepewności pomiaru. Polskie tłumaczenie tego dokumentu
zostało wydane przez Główny Urząd Miar w 1999 roku pod tytułem Wyrażanie niepewności pomiaru.
Przewodnik [2]. W dalszej części tego tekstu powołując się na ten dokument będziemy nazywać go w
skrócie Przewodnikiem.
1
BIPM – Bueaur International des Poids et Mesures.
2
IEC – International Electrotechnical Commission.
3
ISO – International Organization for Standarization.
4
OIML – International Organization of Legal Metrology.
4
2.
Błąd
pomiaru
Niedoskonałości pomiaru powodują, że wynik pomiaru różni się od rzeczywistej wartości
wielkości mierzonej. Różnicę między wartością zmierzoną a wartością rzeczywistą
nazywamy
błędem pomiaru
łą
= − .
Oczywiście wartości rzeczywistej nigdy nie znamy, ale w praktyce możemy jej wartość utożsamiać z
wynikiem pomiaru wykonanego za pomocą metody znacznie dokładniejszej niż nasza. Dla przykładu
wykonując w laboratorium studenckim pomiar wartości jakiejś stałej fizycznej, możemy za wartość
rzeczywistą przyjąć wartość tej stałej wziętą z tablic fizycznych.
Błędy pomiaru mogą mieć charakter systematyczny lub przypadkowy.
2.1
Błędy przypadkowe
Przyjmuje się, ze
błędy przypadkowe
wynikają z tego, że wielkości mające wpływ na wynik
pomiaru nie mają stałych wartości w czasie wykonywania pomiaru, lecz zmieniają się w sposób
nieprzewidywalny (przypadkowy, stochastyczny). Czynniki wywołujące te zmiany nazywamy
oddziaływaniem przypadkowym
. Efektem działania tych czynników są zmiany wyników powtarzanych
obserwacji mierzonej wielkości (kolejny wynik pomiaru może różnić się od poprzedniego). Innymi
słowy błędy przypadkowe prowadzą do rozrzutu wyników pomiaru, przy czym szansa uzyskania
wyniku mniejszego niż wartość rzeczywista jest porównywalna z szansą uzyskania wyniku większego.
A zatem wyniki pomiarów są rozrzucone wokół wartości rzeczywistej (patrz rysunek 1.1. a).
Najczęściej, najlepszym oszacowaniem wartości wielkości mierzonej jest
średnia arytmetyczna
otrzymanych wyników pomiaru, czyli suma tych wartości podzielona przez ich liczbę. Błąd takiego
pomiaru jest różnicą między wartością średnią arytmetyczną i wartością rzeczywistą. Wartości tego
błędu nie znamy, ale możemy go zmniejszyć poprzez zwiększenie liczby pomiarów. Błąd tego typu
maleje do zera, gdy liczba pomiarów dąży do nieskończoności.
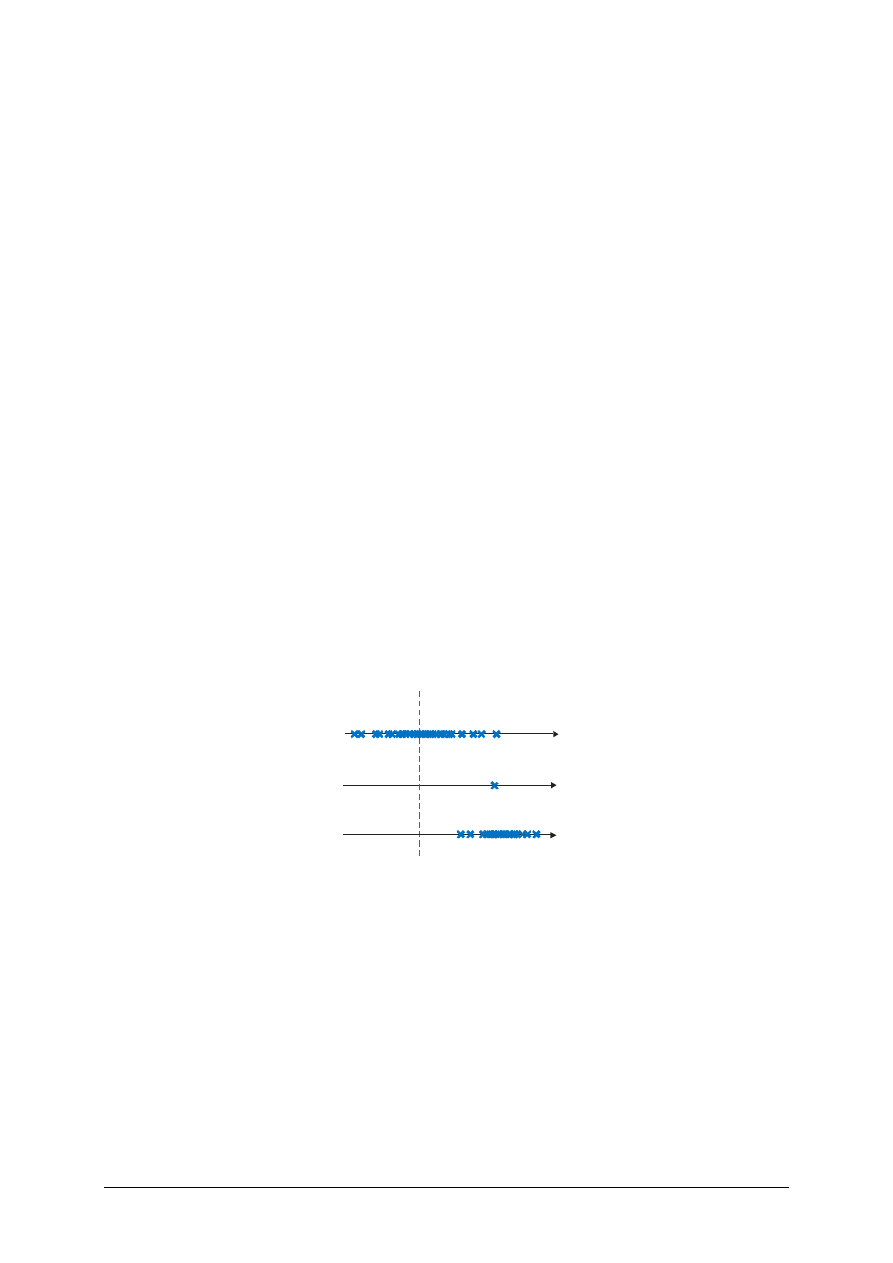
x
x
x
0
x
a)
b)
c)
Rys. 2.1. Schematycznie przedstawione wyniki pomiarów dla różnych przypadków błędów
pomiaru. Wyniki pomiarów reprezentowane są przez niebieskie krzyżyki. Zielona przerywana linia
reprezentuje wartość rzeczywistą. a) rozrzut wyników pomiaru wywołany błędami
przypadkowymi. b) systematyczny błąd pomiaru w przypadku braku błędów przypadkowych. c)
połączenie błędu systematycznego z błędami przypadkowymi.
2.2
Błędy systematyczne
W przeciwieństwie do czynników odpowiedzialnych za powstawanie błędów przypadkowych,
czynnik lub czynniki prowadzące do
błędu systematycznego
(tzw.
oddziaływanie systematyczne
) mają
w każdym pomiarze taki sam wpływ na wynik pomiaru. Jeśli podczas pomiarów z oddziaływaniem
systematycznym nie występują oddziaływania przypadkowe (wszystkie wyniki pomiaru są
jednakowe), to różnica między wartością zmierzoną a rzeczywistą jest stała i równa błędowi
systematycznemu (patrz rysunek 2.1. b). Jeśli na oddziaływania systematyczne nakładają się
5
Niepewność
pomiaru
jest
parametrem
związanym z
rezultatem
pomiaru,
charakteryzującym rozrzut wartości, które można w uzasadniony sposób przypisać
wielkości mierzonej.
oddziaływania przypadkowe, to wyniki pomiarów nie będą rozrzucone wokół wartości rzeczywistej,
lecz wokół wartości przesuniętej względem wartości rzeczywistej o wartość błędu systematycznego
(patrz rysunek 2.1. c). Gdybyśmy w tym przypadku wykonali bardzo dużą liczbę pomiarów eliminując
w ten sposób błąd przypadkowy, to różnica miedzy średnią arytmetyczną wyników pomiarów i
wartością rzeczywistą byłaby równa błędowi systematycznemu.
Jeśli znamy przyczynę błędu systematycznego (lub błędów systematycznych), to powinniśmy
ją usunąć lub jeśli to nie jest możliwe określić ilościowo wpływ oddziaływania systematycznego na
wynik pomiaru i skompensować ten wpływ wprowadzając odpowiednią
poprawkę
. Może to być
poprawka addytywna (do wyniki musimy dodać poprawkę) lub multiplikatywna (wynik musimy
przemnożyć przez odpowiedni współczynnik) lub obie poprawki jednocześnie.
2.3
Błędy grube
Oprócz dwóch typów błędów wymienionych powyżej możemy jeszcze wyróżnić tzw.
błędy
grube
zwane również pomyłkami. Powstają one głównie na skutek pomyłek w odczycie lub zapisie
wyników pomiaru, niewłaściwego użycia przyrządu, błędach w obliczeniach, stosowaniu
niewłaściwych jednostek miar itp. Tego typu błędy prowadzą na ogół do bardzo drastycznych różnic
między wynikiem pomiaru a wartością rzeczywistą przez co są stosunkowo łatwo zauważalne, a tym
samym łatwe do usunięcia. Dalszy opis nie dotyczy tego typu błędów.
3.
Niepewność pomiaru
Termin
niepewność pomiaru
jest używany w dwóch znaczeniach. W pierwszym znaczeniu
używa się go jako określenie ogólnej cechy pomiarów i oznacza wątpliwość co do wartości wyniku
pomiaru. W drugim znaczeniu oznacza on ilościową miarę tej wątpliwości. W dalszej części tekstu
będziemy używać tego pojęcia w tym drugim znaczeniu. W Przewodniku niepewność pomiaru
definiowana jest następująco:
Nie należy mylić pojęcia niepewności pomiarowej z pojęciem błędu pomiaru. Przypomnijmy, że przez
błąd pomiaru rozumiemy różnicę między wartością zmierzoną a rzeczywistą. Wartości błędu (na ogół)
nie znamy. Naszym zadaniem jest określenie stopnia wiarygodności naszego wyniku pomiaru, czyli
określenie
niepewności pomiaru
. Niepewność pomiaru określa szerokość przedziału, w którym mieści
się znaczna część wyników pomiaru (tych, które wykonaliśmy i ewentualnych przyszłych pomiarów
wykonanych tą samą metodą w tych samych warunkach), co pozwala nam wierzyć, że z dużym
prawdopodobieństwem przedział ten zawiera również wartość rzeczywistą (oczywiście jeśli udało się
nam wyeliminować błędy systematyczne). Jednak sama szerokość tego przedziału nie może być
interpretowana jako błąd pomiaru. Nawet w przypadku dużej niepewności pomiaru wartość
zmierzona może być bardzo bliska wartości rzeczywistej.
Określając niepewność pomiaru zakładamy, że pomiar jest wolny od nierozpoznanych
oddziaływań systematycznych. Nierozpoznane oddziaływania systematyczne z natury rzeczy nie
mogą być uwzględnione przy szacowaniu niepewności pomiaru. Rozpoznane oddziaływania
systematyczne powinniśmy usunąć (jeśli jest to możliwe) lub skompensować odpowiednią poprawką.

6
3.1
Niepewność standardowa
Niepewność pomiarową podajemy w postaci tzw. odchylenia standardowego
5
i nazywamy
niepewnością standardową
. Symbolem niepewności standardowej jest mała litera
6
. Wielkość,
której dotyczy niepewność standardowa podajemy w postaci symbolu lub opisu słownego w nawiasie
za literą , np.
( ), ( ), (poziom hemoglobiny we krwi). W przypadku, gdy rozkład statystyczny
zmiennej losowej jest tzw. rozkładem Gaussa, niepewność standardowa określa przedział, który
obejmuje ok. 68% wszystkich wyników pomiarów.
Przewodnik opisuje dwie metody szacowania niepewności standardowej: metodę A i metodę
B. Metoda typu A wykorzystuje statystyczną analizę serii wyników pomiaru. Stosujemy ją w sytuacji,
gdy wykonaliśmy w tych samych warunkach serię co najmniej 5. pomiarów i wyniki tej serii nie są
identyczne. Metodę B oceny niepewności standardowej stosujemy wówczas, gdy zastosowanie
metody A opartej na analizie statystycznej nie jest możliwe, np. wówczas, gdy
•
Dysponujemy zbyt małą liczbą wyników pomiarów (w szczególnym przypadku tylko jednym).
•
Wyniki pomiarów nie wykazują rozrzutu (taka sytuacja ma miejsce wówczas, gdy wpływ
czynników losowych na wyniki pomiaru jest dużo mniejszy od dokładności użytego przyrządu
pomiarowego).
W szczególności metoda B znajduje zastosowanie do oceny niepewności wynikającej z dokładności
użytego przyrządu pomiarowego.
3.2
Niepewność rozszerzona
W szczególnych przypadkach, zwłaszcza wtedy, gdy od wyniku pomiaru zależy zdrowie lub
bezpieczeństwo ludzi lub koszty popełnienia błędu są duże z innych powodów, konieczne jest
podawanie niepewności określającej przedział obejmujący znaczną (większą niż w przypadku
niepewności standardowej) część uzyskiwanych w wyniku pomiaru wartości. Taką niepewność
nazywamy niepewnością rozszerzoną i oznaczamy dużą literą
%. Niepewność rozszerzoną liczymy
mnożąc niepewność standardową przez współczynnik rozszerzenia
&:
%( ) = & ∙ ( ).
Współczynnik rozszerzenia zawiera się zwykle w granicach od 2 do 3. Najczęściej przyjmuje się
& = 2.
W przypadku, gdy rozkład naszej zmiennej losowej jest rozkładem Gaussa, niepewność rozszerzona
ze współczynnikiem rozszerzenia równym 2 określa przedział, który obejmuje ok. 95% wszystkich
wyników pomiarów. Podając niepewność rozszerzoną powinniśmy podać również wartość
współczynnika rozszerzenia.
4.
Pomiary bezpośrednie i pośrednie
Pomiary możemy podzielić na
bezpośrednie
i
pośrednie
. Wykonując pomiar bezpośredni
porównujemy mierzoną wielkość wprost z jej miarą wzorcową (jednostką) zrealizowaną za pomocą
przyrządu pomiarowego (mówiąc prościej odczytujemy wartość mierzoną wprost z przyrządu
pomiarowego). Przykładem może być pomiar szerokości kartki papieru za pomocą miarki
milimetrowej (linijki), pomiar czasu trwania jakiegoś zjawiska za pomocą stopera lub pomiar napięcia
elektrycznego za pomocą woltomierza.
5
Odchylenie standardowe jest pojęciem statystycznym. Ogólnie mówiąc jest to miara rozrzutu statystycznego
wartości zmiennej losowej wokół jej wartości średniej.
6
Od angielskiego słowa uncertainty (niepewność).
7
W pomiarze pośrednim wykonujemy pomiary (bezpośrednie lub pośrednie) innych wielkości
fizycznych, takich, które wiążą się z naszą wielkością fizyczną znaną nam zależnością funkcyjną.
Przykładem może być pomiar objętości V kuli poprzez pomiar (bezpośredni) jej średnicy d i
skorzystanie ze wzoru na objętość kuli:
) =
*+
,
-
, czy pomiar wartości przyspieszenia ziemskiego g
poprzez pomiar długości l tzw. wahadła prostego oraz jego okresu T, a następnie skorzystanie ze
wzoru (w tym przypadku przybliżonego) na okres drgań harmonicznych tego wahadła
. = 2/0
1
2
,
skąd dostajemy:
3 =
4*
5
1
6
5
.
5.
Obliczanie niepewności pomiarów bezpośrednich
5.1
Obliczanie niepewności standardowej metodą A
Załóżmy, że wykonaliśmy serię
7 ≥ 5 pomiarów wielkości i otrzymaliśmy wyniki
:
,
<
, … ,
>
. Jako
estymatę
(oszacowanie) wartości wielkości mierzonej przyjmujemy średnią
arytmetyczną wyników pomiaru:
̅ =
1
7 A
B
>
BC:
.
Niepewność standardową wynikającą z zaobserwowanego rozrzutu statystycznego wyników pomiaru
liczymy ze wzoru
7
:
D
( ) = E
∑ (
B
− ̅)
<
>
BC:
7(7 − 1) .
5.2
Obliczanie niepewności standardowej metodą B
5.2.1
Opis ogólny
a)
Oceniamy granice przedziału (granicznego), w których według naszej wiedzy mieszczą się
aktualne i ewentualne przyszłe wyniki pomiarów. Niech
Δ oznacza połowę szerokości
przedziału granicznego.
b)
Środek przedziału granicznego jest (najczęściej) estymatą wartości wielkości mierzonej.
c)
Przyjmujemy uproszczony rozkład prawdopodobieństwa wyników pomiaru na przedziale
granicznym. Najczęściej jest to rozkład prostokątny lub trójkątny symetryczny, zależnie od
sytuacji. Rozkład prostokątny przyjmujemy, jeśli według nas każdy wynik pomiaru w
przedziale granicznym jest równie prawdopodobny, a rozkład trójkątny wtedy, gdy
prawdopodobieństwo wyników w pobliżu środka przedziału jest największe i spada do zera w
miarę zbliżania się do granic przedziału.
d)
Dla rozkładu prostokątnego, niepewność standardowa wyznaczona metodą B wynosi
H
( ) =
Δ
√3
.
7
Jest to estymata wartości tzw. odchylenia standardowego średniej arytmetycznej.
8
e)
Dla rozkładu trójkątnego, niepewność standardowa wyznaczona metodą B wynosi
H
( ) =
Δ
√6
.
5.2.2
Obliczanie niepewności standardowej wynikającej z dokładności przyrządu
pomiarowego
Proste analogowe przyrządy pomiarowe (np. przymiar kreskowy)
W tym przypadku szacujemy naszą zdolność odczytu wyniku pomiaru ze skali przyrządu, np.
1/2, 1/4, 1/5 (najczęściej 1/2) najmniejszej działki przyrządu. Stanowi to jednocześnie połowę
szerokości przedziału granicznego. Następnie postępujemy tak, jak opisano w punkcie 5.2.1.
Analogowe elektryczne przyrządy pomiarowe (np. woltomierz analogowy)
Na niepewność pomiaru składają się dwa czynniki: niepewność odczytu położenia wskazówki
i niepewność wynikająca z wzorcowania przyrządu przez producenta. Pierwszy wkład do niepewności
obliczamy tak jak opisano w poprzednim punkcie. Oznaczmy ten składnik niepewności przez
KLMNM
( ). Drugi obliczamy na podstawie znajomości tzw. klasy przyrządu & i zakresu pracy przyrządu
O. Niepewność standardową związaną z tym czynnikiem liczymy ze wzoru
P1QRQ
( ) =
& ∙ O
100 ∙ √3
Oba wkłady do niepewności sumujemy zgodnie z regułą składana niepewności standardowych i
ostatecznie niepewność pomiaru analogowym, elektrycznym przyrządem pomiarowym wynosi:
H
( ) = 0
RPQ1Q
<
+
P1QRQ
<
.
Cyfrowe przyrządy pomiarowe
Obliczenia rozpoczynamy od wyznaczenia połowy szerokości przedziału granicznego. Robimy
to korzystając ze wzoru podanego przez producenta przyrządu. Wzór podawany przez producenta
zależy od: funkcji przyrządu (np. pomiar napięcia stałego DC V) i zakresu przyrządu w momencie
pomiaru (np. 2000 mV). Wzór może mieć postać:
±(0.05%rdg + 3dgt)
lub
±0.5% of rdg ± 2D
Symbol rdg oznacza odczytaną z wyświetlacza wartość wielkości mierzonej. Symbol dgt lub D oznacza
rozdzielczość przyrządu, czyli wartość odpowiadającą ostatniej pozycji na wyświetlaczu. Rozdzielczość
przyrządu zależy od zakresu na jakim pracuje przyrząd w momencie pomiaru. Np. jeśli wyświetlacz
przyrządu może wyświetlać 4 cyfry, to na zakresie 2000 mV – dgt=1 mV, a jeśli może wyświetlać 5
cyfr, to na zakresie 2000 mV – dgt=0,1 mV).
Sposób wykorzystania wzorów producenta pokazuje poniższy przykład.
Wykonano pomiar cyfrowym miernikiem ustawionym na funkcję pomiaru oporności elektrycznej i
pracującym na zakresie 2000 Ω. Rozdzielczość przyrządu na tym zakresie wynosi 1 Ω. Z wyświetlacza
przyrządu odczytano wynik pomiaru: 1562 Ω. Załóżmy, że w warunkach wykonywania pomiaru wzór
na dokładność pomiaru podany przez producenta ma postać
±0.8% of rdg ± 2D. Wobec tego
połowa szerokości przedziału granicznego wynosi:
Δ\ =
0,8
100 ∙ 1562 Ω + 2 ∙ 1 Ω ≈ 14,496 Ω.
9
Zakładamy, że na przedziale granicznym rozkład naszej zmiennej losowej jest rozkładem
prostokątnym, a zatem niepewność standardowa pomiaru oporności
\ wynosi
(\) =
14,496 Ω
√3
≈ 8,4 Ω.
6.
Sumowanie składników niepewności
Niepewność wyniku pomiaru na ogół składa się z szeregu składników. Każdy z nich
przedstawiamy w postaci niepewności standardowej. Niektóre z nich mogą być wyznaczone metodą
A, a inne metodą B. Po ich wyliczeniu musimy je zsumować. Sumowanie niepewności standardowych
wykonujemy sumując kwadraty tych niepewności, a następnie pierwiastkując otrzymaną sumę. Jeśli
np. obliczyliśmy metodą A niepewność
D
( ) uwzględniającą rozrzut statystyczny wartości
mierzonych oraz metodą B, niepewność
H
( ) wynikającą z dokładności użytego przyrządu i są to
jedyne składniki niepewności, to ostatecznie niepewność standardowa pomiaru wyniesie
( ) = 0
D
<
( ) +
H
<
( ).
7.
Obliczanie niepewności pomiarów pośrednich
Niech wielkość fizyczna
a, mierzona pośrednio, jest powiązana z innymi wielkościami
fizycznymi
b
:
, b
<
, … , b
c
związkiem
a = d(b
:
, b
<
, … , b
c
).
Wykonujemy pomiary wielkości
b
:
, b
<
, … , b
c
znajdujemy estymaty ich wartości
:
,
<
, … ,
c
oraz
niepewności standardowe tych estymat
(
:
), (
<
), … (
c
).
Estymatę wartości wielkości
a znajdujemy wstawiając do powyższego związku estymaty wartości
wielkości
b
:
, b
<
, … , b
c
:
e = d(
:
,
<
, … ,
c
).
Niepewność standardową pomiaru, nazywaną złożona niepewnością standardową wyliczamy ze
wzoru
8
:
f
(e) = gA(h
B
(
B
))
<
c
BC:
,
gdzie
h
B
, są tzw. współczynnikami wrażliwości, które są wartościami pochodnych cząstkowych funkcji
d po poszczególnych zmiennych w punkcie
:
,
<
, … ,
c
, czyli
h
B
≡
jd
j
B
k
l
m
,l
5
,…,
n
.
Przypadki szczególne
a)
e = d(
:
,
<
, … ,
c
) =
: :
+
< <
+
o o
+ ⋯ = A
B B
>
BC:
.
8
Zakładamy, że wszystkie wielkości
b
:
, b
<
, … , b
c
są niezależne (nieskorelowane).

10
Wówczas
h
B
=
B
, a zatem
(e) = gA(
B
(
B
))
<
c
BC:
,
b)
e = d(
:
,
<
, … ,
c
) = q ∙
:
r
m
∙
<
r
5
∙ … ∙
c
r
n
= q s
B
r
t
>
BC:
.
Wówczas
h
B
= e
r
t
l
t
, a zatem
(e) = |e| ∙ Evw
:
(
:
)
:
x
<
+ vw
<
(
<
)
<
x
<
+ ⋯ + vw
c
(
c
)
c
x
<
.
8.
Zapis wyników pomiarów
8.1
Zaokrąglanie wyników
Po obliczeniu estymaty wartości wielkości mierzonej i niepewności pomiaru, musimy
zaokrąglić otrzymane liczby. Zaokrąglanie wyniku pomiaru zaczynamy od zaokrąglenia niepewności
pomiaru. Niepewność pomiaru zaokrąglamy zawsze do drugiej cyfry znaczącej, czyli drugiej cyfry
(licząc od lewej strony) różnej od zera. Następnie zaokrąglamy estymatę wartości wielkości
mierzonej. Zaokrąglamy ją do tego samego miejsca rozwinięcia dziesiętnego, do którego
zaokrągliliśmy niepewność.
UWAGA:
Jeżeli po zaokrągleniu niepewności, jej drugą cyfrą znaczącą jest zero, to należy ją zapisać.
Podobnie jest z zaokrągleniem wartości mierzonej. Jeśli jej ostatnią cyfrą (lub ostatnimi cyframi) jest
zero, to należy ją (należy je) zapisać.
8.2
Formy podawania wyniku
Zapisując wynik pomiaru musimy podać zarówno estymatę wartości wielkości mierzonej, jak i
niepewność pomiaru. Obowiązkowo musimy podać jednostki, w jakich podajemy obie wartości.
Wynik pomiaru nie musi być podawany w jednostkach podstawowych układu SI. Jeśli czytelniejszy
będzie zapis w jednostkach wtórnych np. w g/cm
3
zamiast w kg/m
3
albo w μm zamiast w m, to
powinniśmy użyć jednostek wtórnych.
Jeśli podawaną miarą niepewności pomiaru jest niepewność standardowa, to możemy podać
wynik pomiaru w postaci:
3 = 9,88 m s
<
⁄ , (3) = 0,35 m s
<
⁄
lub w tzw. postaci skróconej
3 = 9,88(35) m s
<
⁄ .
Cyfry zapisane w nawiasie, w skróconej postaci zapisu, są dwiema znaczącymi cyframi niepewności,
które pozostały po zaokrągleniu. Pozycje dziesiętne tych cyfr odpowiadają pozycjom dziesiętnym
ostatnich cyfr wartości wielkości mierzonej podanej przed nawiasem. W nawiasie nie umieszczamy
przecinka. Jeśli np. mamy wynik:
{ = 533,8 m, ({) = 1,2 m,

11
to zapis skrócony będzie miał postać:
533,8(12) m.
UWAGA:
W zapisie skróconym w nawiasie znajdują się zawsze dwie cyfry, przy czym pierwsza z nich
nie może być zerem (jest to konsekwencja reguły zaokrąglania niepewności).
Jeśli podawaną miarą niepewności pomiaru jest niepewność rozszerzona, to możemy podać
wynik pomiaru w postaci:
3 = 9,88 m s
<
⁄ , %(3) = 0,70 m s
<
⁄ , & = 2
lub w postaci
3 = (9,88 ± 0,70) m s
<
⁄ , & = 2.
UWAGI:
1)
Zapis skrócony z zapisem dwóch cyfr niepewności w nawiasach stosujemy tylko dla
niepewności standardowej.
2)
Zapis z użyciem symbolu
± stosujemy tylko dla niepewności rozszerzonej.
3)
Zgodnie z Rozporządzeniem Rady Ministrów z dnia 30 listopada 2006 r. w sprawie
legalnych jednostek miar:
a.
przy zapisywaniu wartości wielkości należy zostawić odstęp między wartością liczbową
a oznaczeniem jednostki miary. Wyjątkiem są oznaczenia jednostki miary kąta: stopnia,
minuty i sekundy.
b.
nazwę jednostki miary pisze się małą literą
9
, jeżeli ogólne reguły pisowni polskiej nie
stanowią inaczej
10
.
c.
w druku jednostki piszemy czcionką prostą.
d.
nazwy jednostek miar odmienia się zgodnie z zasadami deklinacji polskiej, np. 100
gramów, a nie 100 gram.
Oprócz niepewności standardowej lub rozszerzonej dobrze jest podać również bezwymiarową miarę
niepewności, np. standardową niepewność względną procentową wyliczoną ze wzoru:
( )
∙ 100.
Niepewność względną zaokrąglamy do dwóch cyfr znaczących.
9
Np. gram, metr, sekunda, niuton, tesla, amper, ale w skrótach g, m, s, N, T, A.
10
Np. w zdaniu „Metr jest jednostką długości w układzie SI” – metr jest napisany z dużej litery, gdyż słowo to
rozpoczyna zdanie.
12
8.3
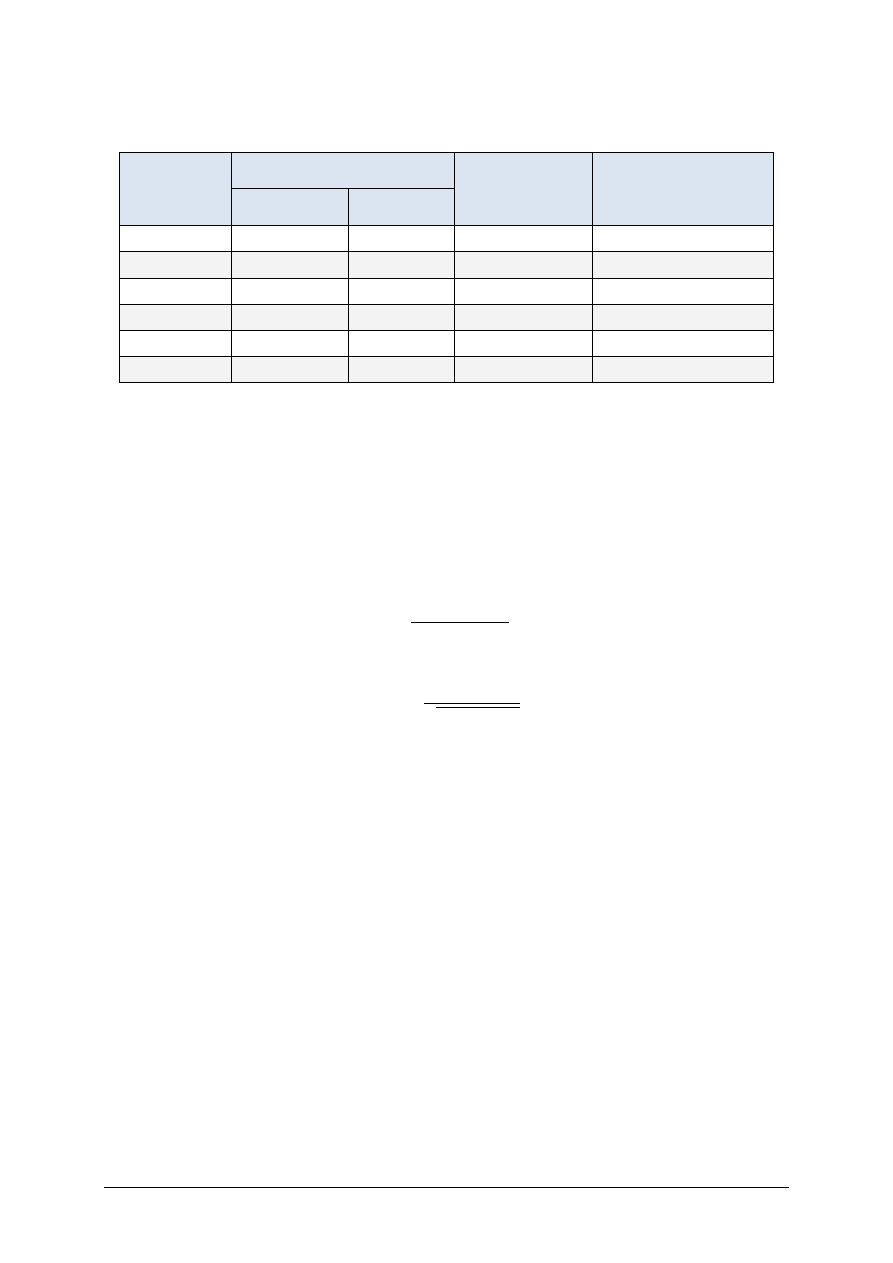
Przykłady zaokrągleń i zapisów wyniku
Wartość
zmierzona
przed
zaokrągleniem
Niepewność pomiaru
Wartość zmierzona
po zaokrągleniu
Zapis wyniku w wersji
skróconej
przed
zaokrągleniem
po zaokrągleniu
7,34553 V
0,02876 V
0,029 V
7,346 V
% = 7,346(29) V
1356,033 mT
18,761 mT
19 mT
1356 mT
~ = 1356(19) mT
1000,023 kg/m
3
0,9952 kg/m
3
1,0 kg/m
3
1000,0 kg/m
3
€ = 1000,0(10) kg/m
o
0,0880134 mm
0,0035872 mm
0,0036 mm
0,0880 mm
= 0,0880(36) mm
342753,22 Pa
1388,201 Pa
14 hPa
3428 hPa
= 3428(14) hPa
34,999 Hz
0,22345 Hz
0,22 Hz
35,00 Hz
d = 35,00(22) Hz
9.
Uśrednianie wyników
Czasami zdarza się, że dysponujemy kilkoma wynikami pomiaru, tzn. mamy kilka estymat
wartości wielkości mierzonej oraz ich niepewności, np.
:
,
:
( ),
<
,
<
( ) … ,
>
,
>
( ) i chcemy
uśrednić te wyniki, tzn. znaleźć jedną, uśrednioną estymatę wartości wielkości mierzonej i jej
niepewność
, ( ). Musimy przy tym uwzględnić fakt, że estymaty o niższej niepewności są
ważniejsze od tych z większymi niepewnościami. Dlatego zamiast średniej arytmetycznej powinniśmy
policzyć tzw. średnią ważoną z wagami faworyzującymi wyniki pomiarów o niższej niepewności. W
tym przypadku najodpowiedniejszą będzie średnia ważona liczona według wzoru
=
∑
B B
…<
( )
>
BC:
∑
B
…<
( )
>
BC:
.
Niepewność standardowa takiej średniej ważonej wyraża się wzorem
( ) =
1
0∑
B
…<
( )
>
BC:
.
10.
Opracowywanie wyników pomiaru wielkości zależnych
10.1
Graficzna prezentacja wyników
Niekiedy dokonujemy pomiaru jakiejś wielkości fizycznej w funkcji innej wielkości, np. opór
elektryczny przewodnika w funkcji temperatury, natężenie oświetlenia w funkcji odległości od źródła
światła itp. Wyniki takich pomiarów powinniśmy przedstawić za pomocą wykresu.
W dobie komputerów rzadko kto rysuje jeszcze wykresy ręcznie na papierze milimetrowym,
jednak nawet używanie programów komputerowych do tworzenia wykresów nie zwalnia nas z
obowiązku stosowania zasad rysowania wykresów, zwłaszcza w przypadku używania programów, w
których użytkownik sam decyduje o wielu elementach wykresu. Te zasady można ująć w
następujących punktach:
•
Wykres musi mieć opis (tytuł), który wyjaśnia, co ten wykres przedstawia.
•
Każda z osi wykresu musi być opisana. W opisie znajduje się nazwa lub symbol zmiennej,
której oś dotyczy oraz jednostka, w której oś jest wyskalowana.
13
•
Należy odpowiednio dobrać skale na osiach oraz początek układu współrzędnych tak, aby
wykres pokrywał znaczną część kartki w obu kierunkach (osie układu współrzędnych nie
muszą na wykresie zaczynać się od zera).
•
Na osiach nanosimy skalę w postaci równooddalonych opisanych kresek
odpowiadających czytelnym wartościom (np. 1, 2, 3 itd., a nie np. 1,24; 2,48; 3,62 itd.).
•
Nie nanosimy na osiach kresek odpowiadających współrzędnym punktów pomiarowych!
•
Punkty pomiarowe nanosimy w postaci wyraźnych znaków graficznych, takich jak
krzyżyki, kółka, kwadraty itp. (punkt pomiarowy powinien leżeć w geometrycznym środku
danej figury).
•
Jeśli na jednym arkuszu rysujemy kilka wykresów, wówczas punkty należące do każdego z
nich oznaczamy w inny sposób (innym kolorem lub inną figurą).
•
Wokół punktów pomiarowych (wszystkich lub najbardziej charakterystycznych) nanosimy
prostokąty niepewności.
•
Ostatnią czynnością jest wykreślenie krzywej. Robimy to za pomocą przeźroczystych
krzywików i/lub linijek) w taki sposób, aby otrzymać gładką krzywą przechodząca przez
prostokąty niepewności. Liczby punktów pomiarowych leżących o obu stronach krzywej
powinny być zbliżone do siebie.
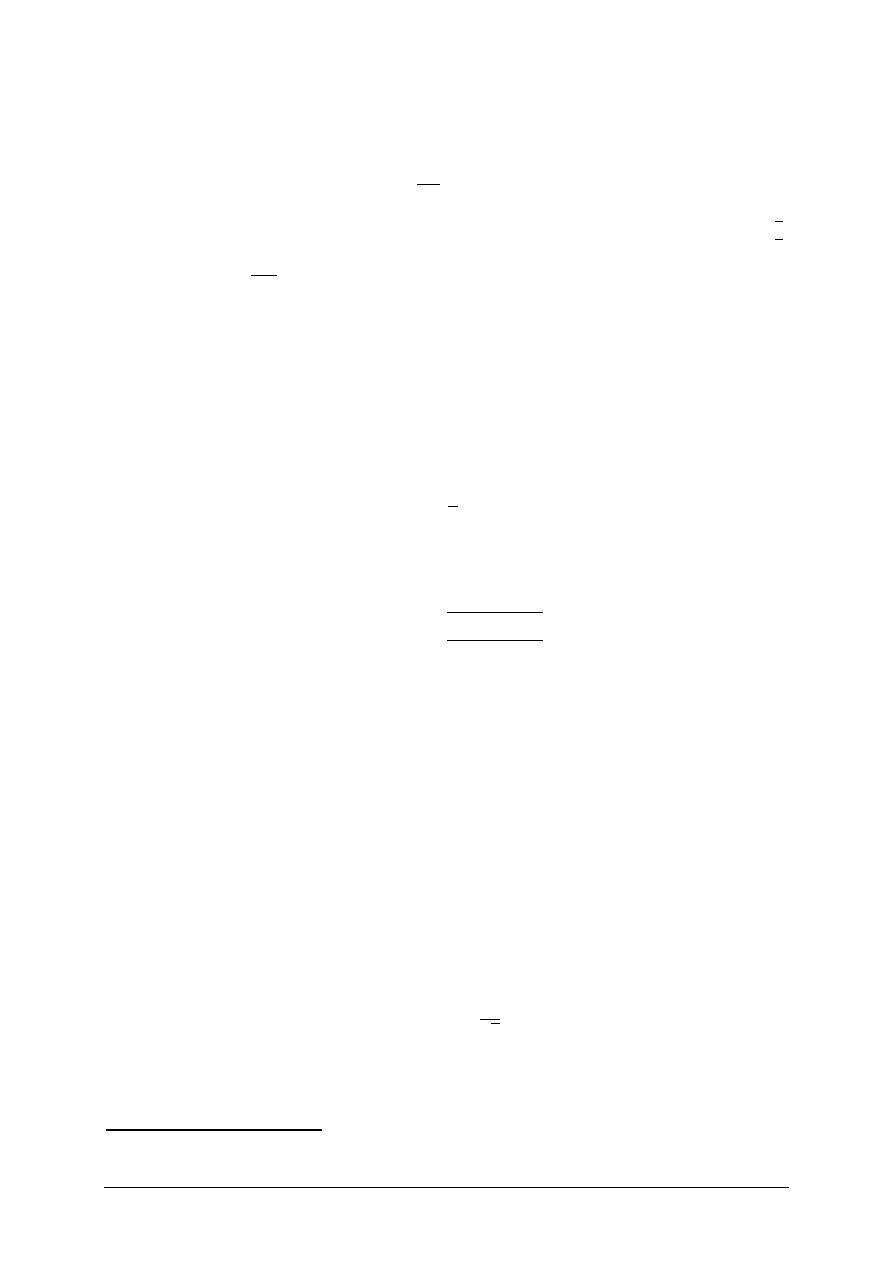
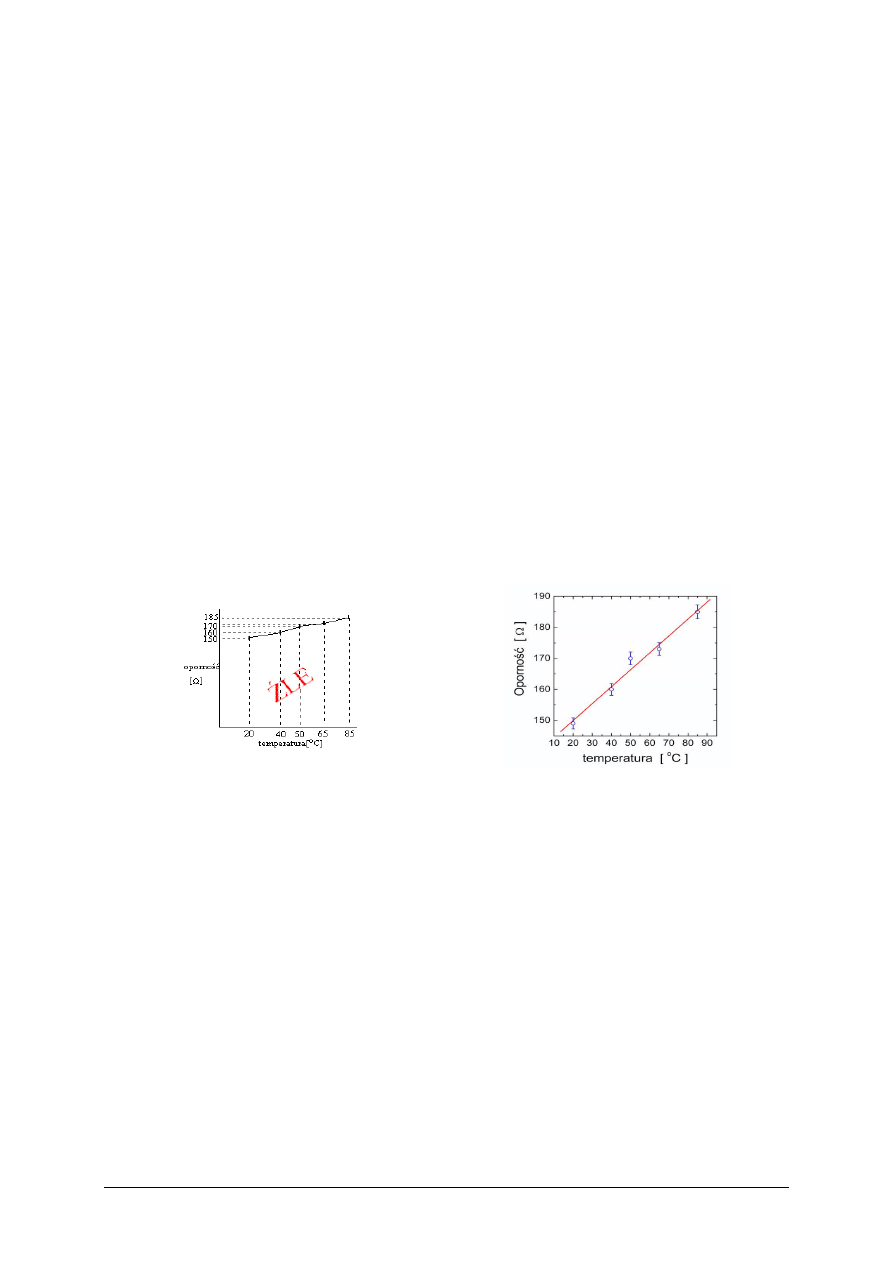
Przykład źle i poprawnie sporządzonego wykresu pokazano na rysunku 7.1.
(a)
(b)
Rys. 10.1. Przykład źle (a) i dobrze (b) narysowanego wykresu zależności oporu elektrycznego od
temperatury. Oba wykresy powstały na tych samych punktach pomiarowych.
10.2
Regresja liniowa
Załóżmy, że między mierzonymi wielkościami
, e występuje zależność linowa
e =
+ .
Graficznym obrazem tej zależności jest prosta o współczynniku nachylenia przecinająca oś
rzędnych w punkcie . Parametry
, mają na ogół interpretację fizyczną. Na przykład zależność
napięcia na oporniku
% od natężenia prądu , zgodnie z prawem Ohma ma postać % = \ . W tym
przypadku współczynnik kierunkowy prostej ma łatwą fizyczną interpretację – jest on równy oporowi
elektrycznemu opornika i, jeśli napięcie podamy w woltach, a prąd elektryczny w amperach, to
współczynnik kierunkowy naszej prostej będzie wielkością wyrażoną w omach. W większości
przypadków interpretacja fizyczna parametrów a i b prostej jest bardziej złożona. Na przykład
14
zależność między niewielkim wydłużeniem drutu o długości początkowej
{ i średnicy † od wartości
przyłożonej do drutu siły
‡ ma zgodnie z prawem Hook’a postać
Δ{ =
4{
/†
<
ˆ ∙ ‡,
gdzie
ˆ jest modułem Younga materiału, z którego wykonany jest drut. A zatem współczynnik
kierunkowy prostej
‰{ = ‡ jest równy
=
4{
/†
<
ˆ.
Wykonując pomiary długości i średnicy drutu oraz jego wydłużenia dla różnych sił, możemy po
wyznaczeniu współczynnika obliczyć moduł Younga materiału, z którego wykonano drut
ˆ =
4{
/†
<
.
Parametry
, prostej dopasowującej punkty pomiarowe dwóch wielkości zależnych od siebie
liniowo możemy oszacować metodą graficzną rysując na oko prostą przechodzącą możliwie blisko
punktów pomiarowych (wśród punktów pomiarowych nieleżących bezpośrednio na tej prostej, mniej
więcej połowa z nich powinna znajdować się nad, a połowa pod prostą). Do oszacowania
niepewności parametrów i musimy na wykres nanieść dwie skrajne proste oparte na
wierzchołkach skrajnych prostokątów błędów. Taka metoda da nam jednak bardzo niedokładne
oszacowanie parametrów prostej i ich niepewności. Znacznie lepszą metodą szacowania wartości
parametrów funkcji dopasowywanej do punktów pomiarowych jest tzw.
metoda najmniejszych
kwadratów
. Zgodnie z tą metodą najlepszymi parametrami naszej funkcji będą takie parametry, dla
których suma kwadratów odchyleń wartości tej funkcji i wartości zmierzonych będzie minimalna. W
przypadku funkcji liniowej staramy się tak dobrać parametry
, , aby zminimalizować funkcję
11
d( , ) = A(
B
+ − e
B
)
<
>
BC:
= minimum.
Spełnienie tego warunku dostajemy dla wartości
, wyliczonych według następujących wzorów
=
7 ∑
B
e
B
>
BC:
− ∑
B
>
BC:
∑ e
B
>
BC:
7 ∑
B
<
>
BC:
− ‹∑
B
>
BC:
Œ
<
, = e• − ̅,
gdzie
̅ =
:
>
∑
B
>
BC:
i
e• =
:
>
∑ e
B
>
BC:
.
Niepewności standardowe obu parametrów wyliczamy ze wzorów
( ) = E
7
7 − 2 ∙
∑ (
B
+ − e
B
)
<
>
BC:
∑
B
<
>
BC:
− ‹∑
B
>
BC:
Œ
<
, ( ) = ( ) ∙ g
1
7 ∙ A
B
<
>
BC:
.
W szczególnym przypadku zależność liniowa ma postać
e = . W takim przypadku wzory na
współczynnik i jego niepewność standardowa przyjmują następującą postać
11
Kryterium daje nam najlepsze (w sensie metody najmniejszych kwadratów) oszacowanie parametrów
dopasowania przy założeniu, że wszystkie punkty pomiarowe są obarczone jednakowymi błędami
przypadkowymi o rozkładzie Gaussa, a błędy systematyczne są małe w porównaniu z błędami przypadkowymi.
15
=
∑
B
>
BC:
∑ e
B
>
BC:
∑
B
<
>
BC:
, ( ) = E
1
7 − 1 ∙
∑ e
B
<
− ∑
B
∑ e
B
>
BC:
>
BC:
>
BC:
∑
B
<
>
BC:
.
W przypadku wielu funkcji nieliniowych jesteśmy w stanie dokonać transformacji, po których
dostaniemy zależność liniową, do której będziemy mogli zastosować opisaną wyżej metodę. Na
przykład Jeśli mamy zależność
e( ) =
<
+ ,
to po wprowadzeniu pomocniczej zmiennej
w( ) = 1
<
⁄ dostaniemy zależność liniową
e(w) = w + .
Przy czym interesujące nas parametry
, nowej zależności są takie same jak naszej zależności
podstawowej. W innych sytuacjach otrzymana po transformacji zależność może mieć inne parametry,
które jednak będą w prosty sposób wiązać się z naszymi parametrami
, .
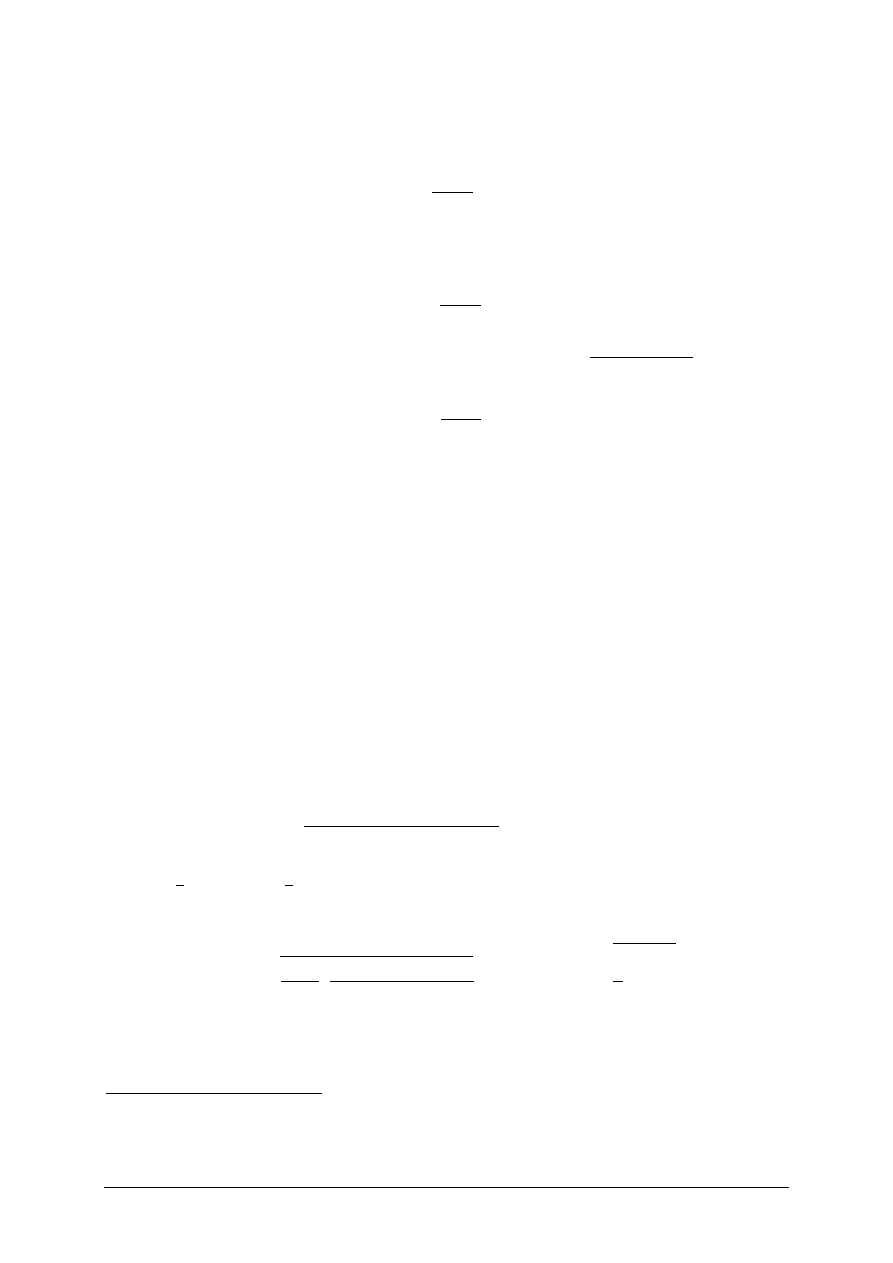
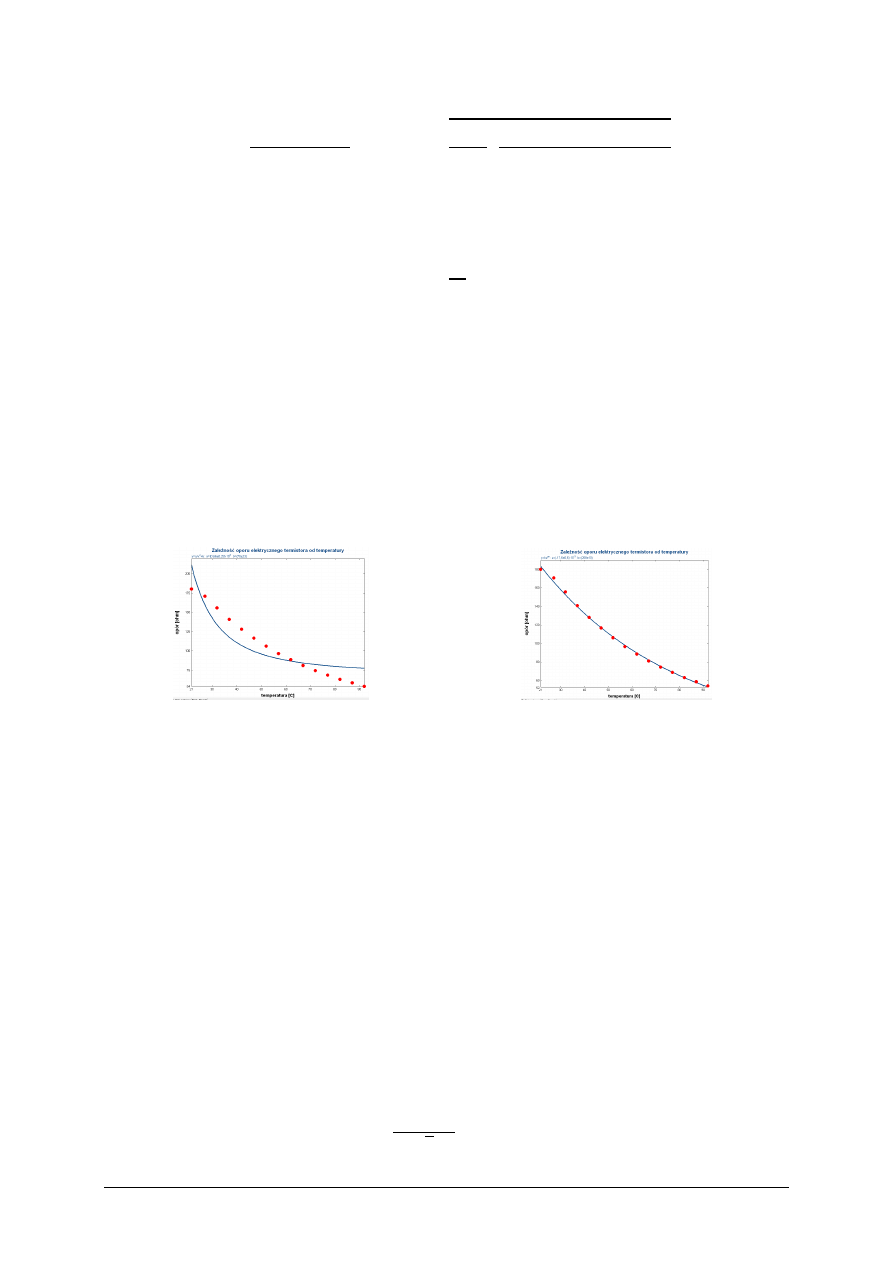
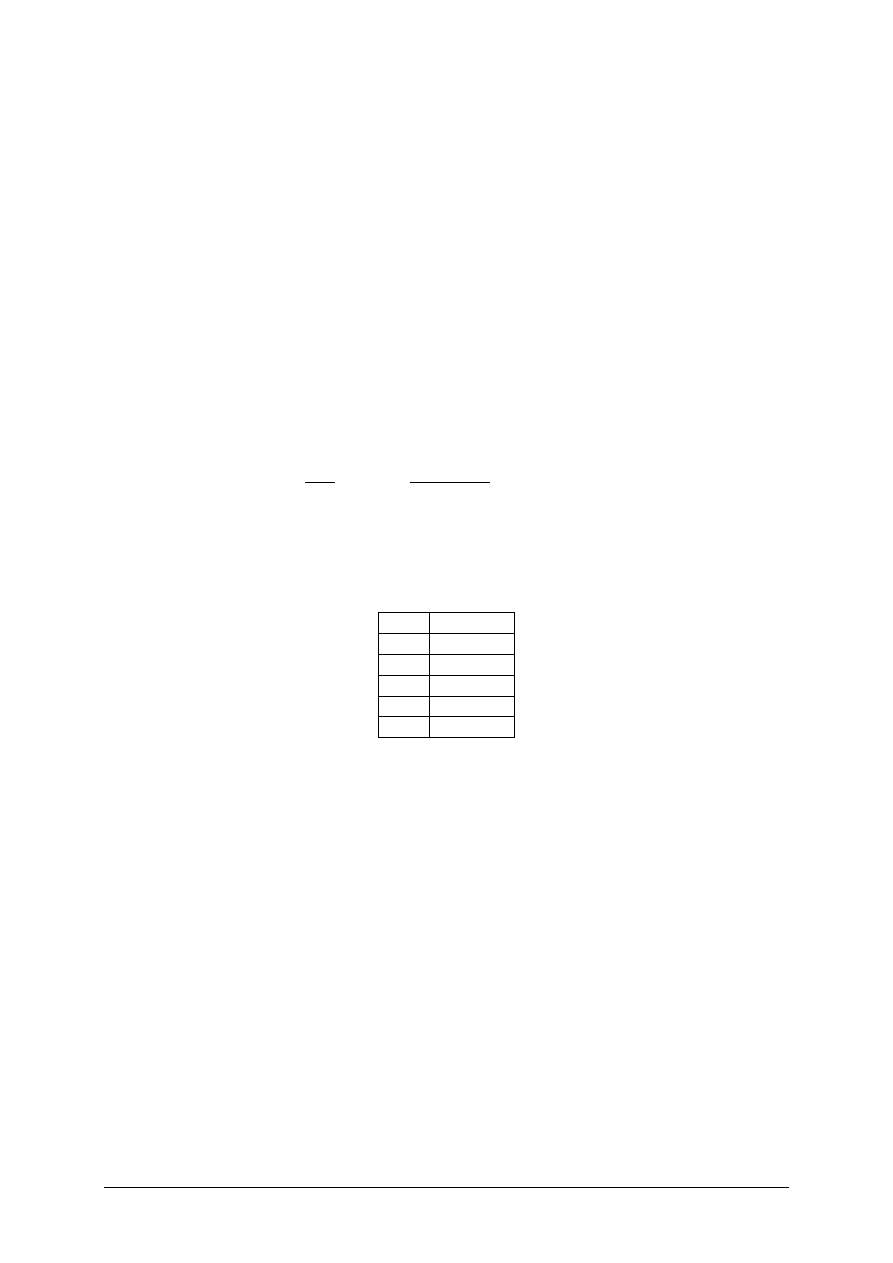
Musimy pamiętać, że metoda najmniejszych kwadratów wyliczy parametry dopasowania Gaussa
nawet w przypadku, gdy faktyczna zależność między mierzonymi wielkościami jest inna niż założona
przez nas. W takim przypadku krzywa „dopasowana” wcale nie musi przebiegać w pobliżu punktów
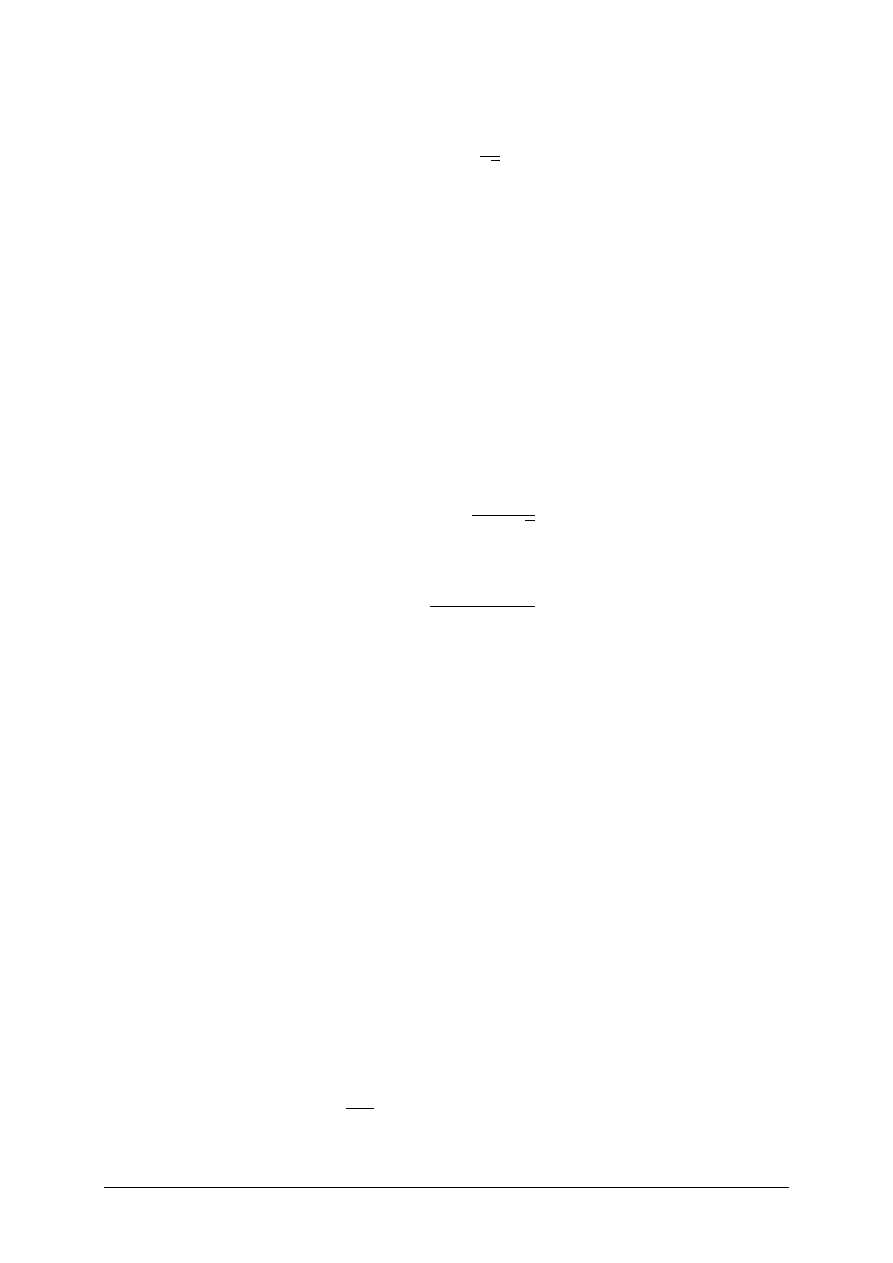
pomiarowych. Przykład takiej sytuacji pokazano na Rysunku 10.2 a.
(a)
(b)
Rys. 10.2. Przykład źle (a) i dobrze (b) dobranej zależności oporu elektrycznego termistora od
temperatury.
11.
Przykłady obliczeń i zapisu wyników pomiaru
Przykład 1.
Wykonano 3 pomiary szerokości
{ kartki papieru i uzyskano za każdym razem ten sam wynik
210,5 mm. Pomiar wykonywano przymiarem kreskowym, którego najmniejsza działka jest równa
1 mm. Zarówno liczba pomiarów, jak i fakt ich powtarzalności sprawia, że niepewność pomiaru
możemy obliczyć jedynie metodą B. W tym przypadku będzie to niepewność, którego jedynym
źródłem jest dokładność użytego przyrządu i zdolności percepcyjnych osoby wykonującej pomiar.
Załóżmy, że osoba ta uważa, że była w stanie oszacować położenie krawędzi kartki z dokładnością do
¼ działki skali przyrządu, czyli 0,25 mm. A zatem osoba ta uważa, że szerokość kartki mieści się
pomiędzy 210,25 mm, a 210,75 mm, przy czym wynik 210,50 mm jest bardziej prawdopodobny niż
wartości skrajne. Innymi słowy osoba przyjęła przedział graniczny, którego połowa szerokości wynosi
0,25 mm, a rozkład prawdopodobieństwa wewnątrz tego przedziału jest rozkładem trójkątnym.
Wynika stąd, że niepewność standardowa pomiaru wynosi:
({) =
0,25 mm
√6
≈ 0,102 mm.
16
Niepewność zaokrąglamy do 2 cyfr znaczących, czyli
({) = 0,10 mm.
Niepewność pomiaru w mm zapisana jest do drugiego miejsca po przecinku. Do tego samego miejsca
musimy zapisać wartość zmierzoną. Będzie to 210,50 mm. Wynik pomiaru możemy zapisać w postaci:
{ = 210,50 mm, ({) = 0,10 mm
lub w postaci skróconej:
{ = 210,50(10) mm.
Zwróćmy uwagę na konieczność podania wartości zmierzonej w postaci 210,50 zamiast 210,5. Ten
obowiązek jest wyraźnie zrozumiały w zapisie skróconym, gdyż zapis
{ = 210,5(10) mm oznaczałby,
że niepewność standardowa wynosi
({) = 1,0 mm!
Standardowa niepewność procentowa wynosi:
Ž
1
=
({)
{ ∙ 100% =
0,10 mm
210,50 mm ∙ 100% ≈ 0,048 %
Przykład 2.
Za pomocą stopera mechanicznego o dokładności 0,2 s, wykonano 5 pomiarów czasu trwania
10. pełnych wychyleń wahadła. Otrzymane wartości podano w tabeli:
l.p.
t=10T [s]
1
14,6
2
14,4
3
14,6
4
14,6
5
14,2
Wyniki pomiaru różnią między sobą i jest ich 5, a zatem możemy zastosować metodę A oszacowania
niepewności pomiaru. Średnia arytmetyczna wynosi:
•̅ = 14,480 s.
Niepewność standardowa liczona metodą A wynosi
D
(•) = 0,0800 s.
Drugim składnikiem niepewności jest niepewność związana z dokładnością przyrządu pomiarowego.
W naszym przypadku był to stoper mechaniczny. Wskazówka takiego stopera przeskakuje co 0,2 s.
Ponieważ przez ok. 0,2 s wskazówka jest nieruchoma, to odczyt czasu np. 14,6 s oznacza, że mierzony
odcinek czasu mieści się w przedziale o szerokości 0,2 s. Ponadto możemy założyć, że środkiem tego
przedziału jest odczytana przez nas wartość oraz, że każda z wartości w tym przedziale jest równie
prawdopodobna. Wynika z tego że połowa szerokości przedziału granicznego wynosi
0,2 s 2
⁄ = 0,1 s,
a rozkład prawdopodobieństwa na tym przedziale jest rozkładem prostokątnym. A zatem niepewność
standardowa wyznaczona metodą B, związana z dokładnością przyrządu pomiarowego wynosi:

17
H
(•) =
0,1 s
√3
≈ 0,0577 s.
Sumując oba składniki niepewności pomiaru dostajemy
(•) = •0,0800
<
+ 0,0577
<
s ≈ 0,0879 s.
Po zaokrągleniu do dwóch cyfr znaczących niepewność pomiaru jest równa
(•) = 0,088 s.
Skrócony zapis wyniku pomiaru ma postać
•̅ = 14,480(88)s.
Jeśli w tym przykładzie interesuje nas czas pojedynczego okresu, to musimy skorzystać ze związku
. =
•
10.
Stąd
.• =
14,480 s
10
= 1,4480 s.
Zaś niepewność standardową wyliczymy ze wzoru (patrz przypadek (a) w rozdziale Pomiary
pośrednie):
(.) = Ev
1
10 ∙ (•)x
<
=
(•)
10 = 0,0088 s.
Ostatecznie
.• = 1,4480(88)s.
Standardowa niepewność procentowa wynosi:
Ž
6
=
0,0088 s
1,4480 s ∙ 100% = 0,61%.
Literatura
[1] Guide to the Expression of Uncertainty Measurement, Pierwsze wydanie 1993, poprawione w
1995. International Organization for Standarization 1993.
[2] Wyrażanie niepewności pomiaru. Przewodnik, Główny Urząd Miar 1999.
[3] A. Zięba, Natura niepewności pomiaru a jego nowa kodyfikacja. Postępy Fizyki 52, z. 5 (2001).
[4] H. Szydłowski, Międzynarodowe normy oceny niepewności pomiarów. Postępy Fizyki 51, z. 2
(2000).
[5] J. Kurzyk, Obliczanie niepewności i wyrażanie niepewności pomiaru – wersja dłuższa. Dokument
wewnętrzny IFPK, 2013.
Wyszukiwarka
Podobne podstrony:
Pomiarydc id 374638 Nieznany
dod podstawy pomiarow id 138636 Nieznany
9 Instrumenty pomiarowe id 4825 Nieznany (2)
65 cw wynik pomiaru id 44392 Nieznany (2)
Pomiarydc id 374638 Nieznany
pomiar wsp wydatku id 427855 Nieznany
pomiary mocy i energii id 37439 Nieznany
5 Pomiary sil skrawania id 4036 Nieznany (2)
pomiar obciazenia id 373908 Nieznany
Pomiary napiec zmiennych id 374 Nieznany
pomiar oporu id 373924 Nieznany
Pomiary oscyloskopowe id 374431 Nieznany
Pomiary tensometryczne id 37456 Nieznany
POMIAR TEMPERATURY id 374114 Nieznany
Pomiar mocy i energii id 373838 Nieznany
P5 teoria niepewnosci id 344693 Nieznany
biernat szacowanie niepew id 85 Nieznany (2)
Niepewnosci pomiaru wersja podstawowa id 319237
więcej podobnych podstron