Definiowanie prototypu o nazwie BOSH:
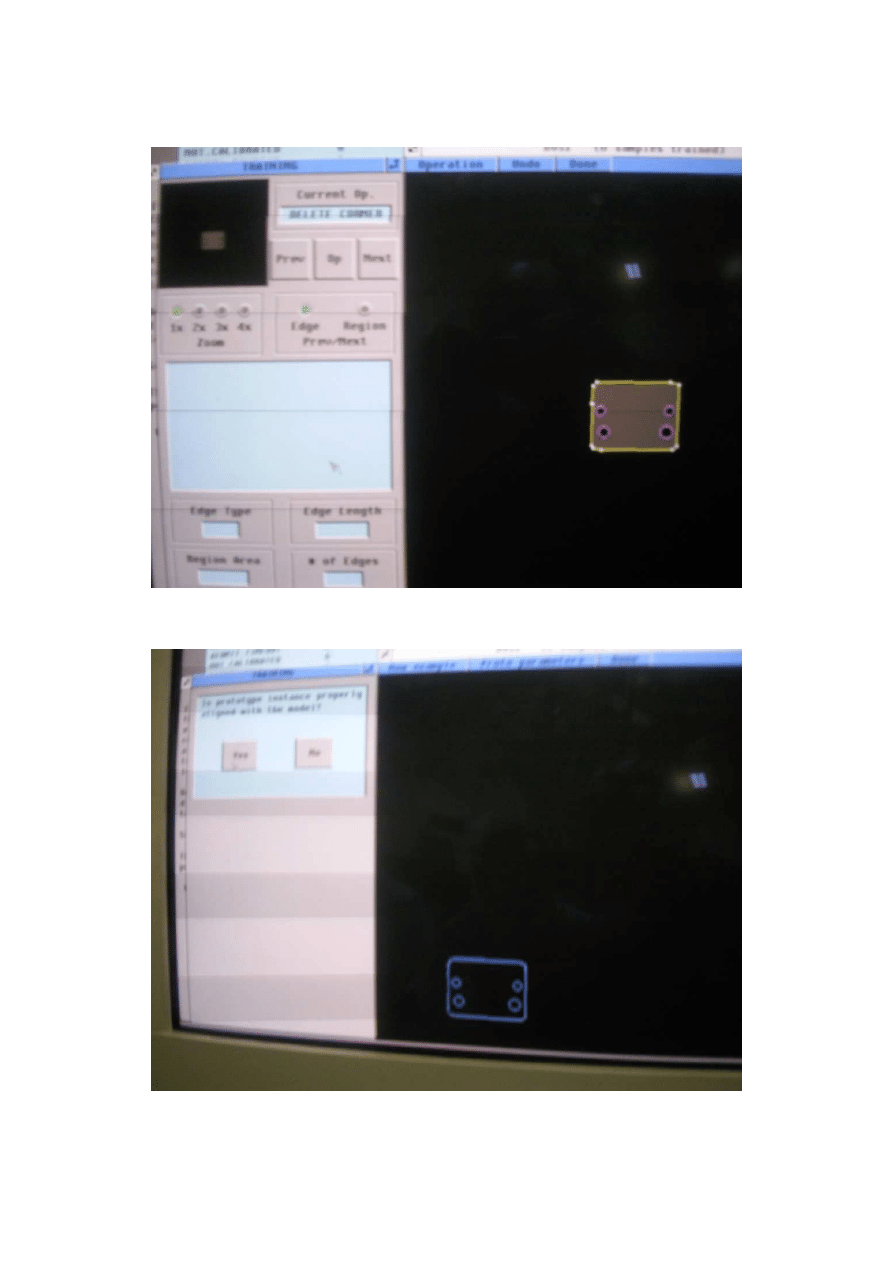
Rys. 1 – Edycja pierwszego wzorca
Rys. 2 – Potwierdzenie dopasowania wzorca do modelu – pokrywające się krawędzie
wyświetlane są w kolorze jasnoniebieskim
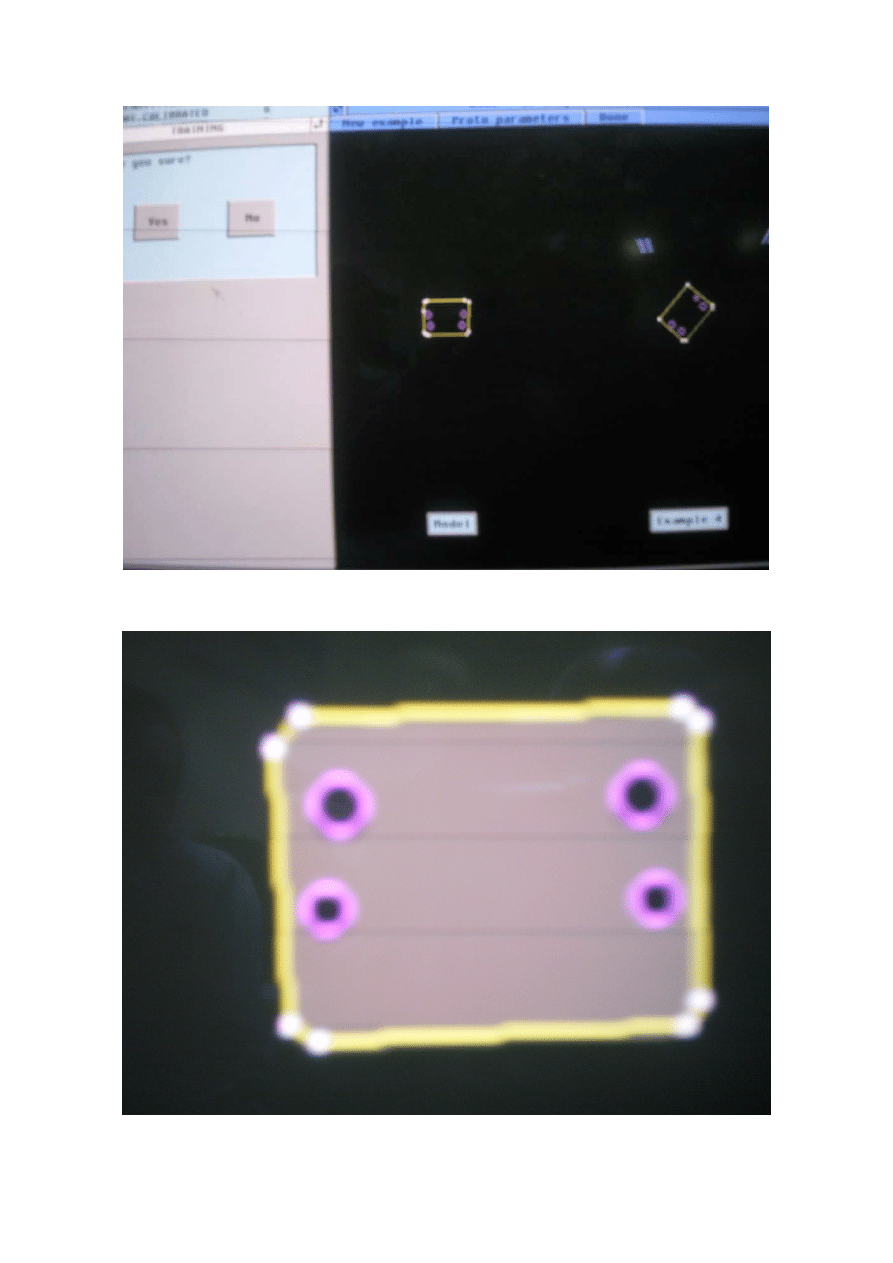
Rys. 3 – Edycja przykładu wzorca nr 4 (Example 4)
Rys. 4 – Wzorzec nr 4 po przeredagowaniu szczegółów
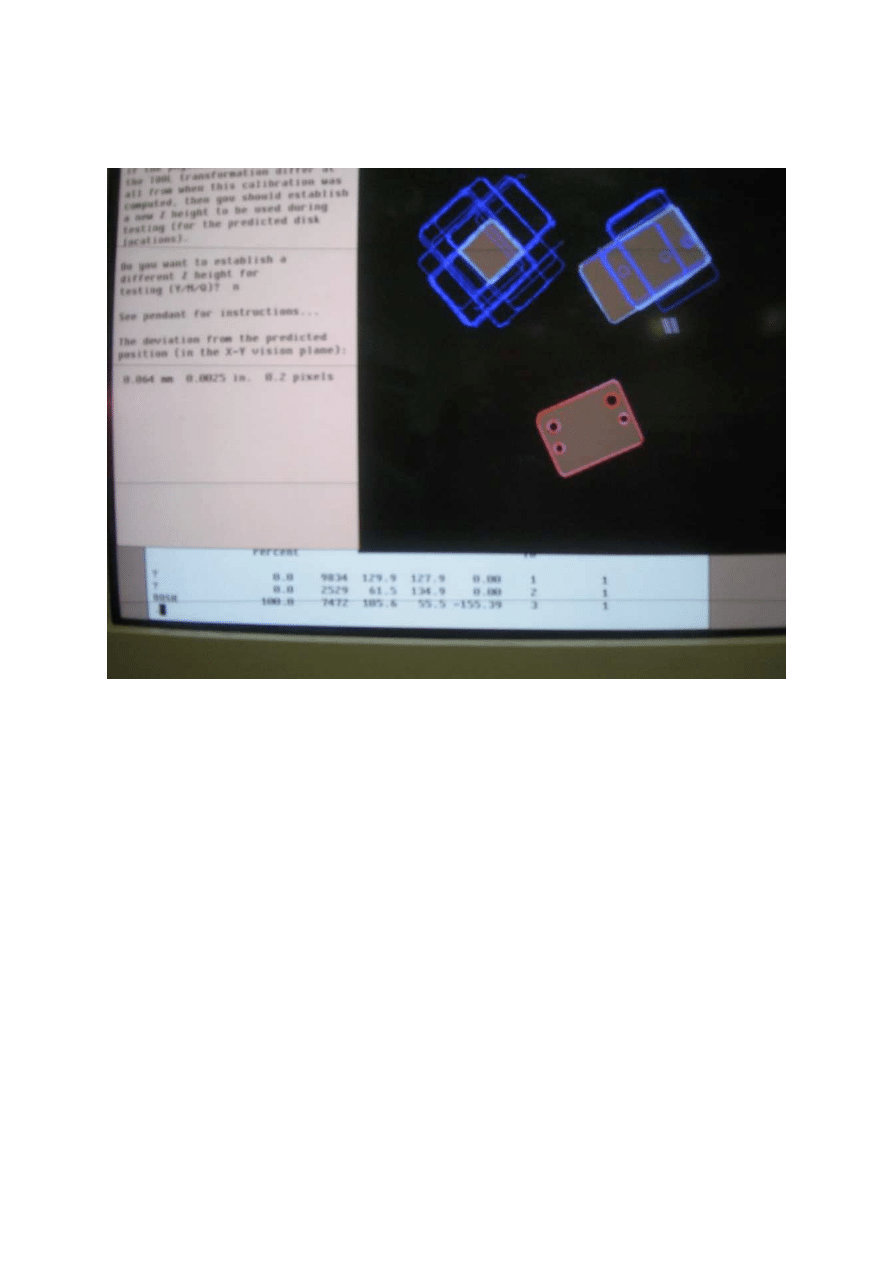
Rys. 5 – Rozpoznanie stworzonego prototypu o nazwie BOSH spośród trzech obiektów
znajdujących się w polu widzenia kamery (kolejne kolumny tabeli: nazwa prototypu,
procentowy stopień rozpoznania obiektu, 3 składowe transformacji obiektu, numer indeksu
obiektu i numer kamery wirtualnej obiektu)
Definiowanie prototypu o nazwie TROJ:
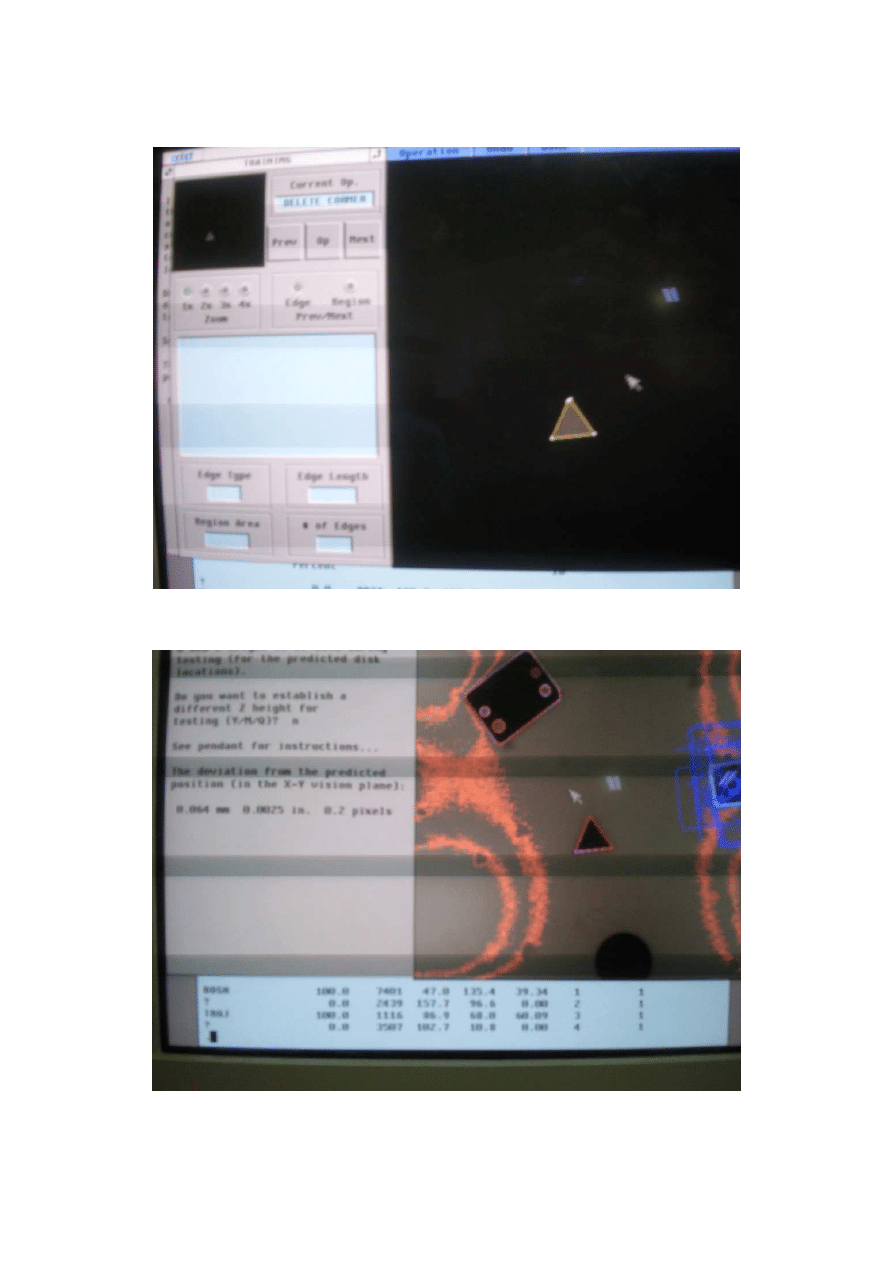
Rys. 6 - Edycja pierwszego wzorca
Rys. 7 - Rozpoznanie stworzonych dwóch prototypów o nazwach BOSH i TROJ spośród
czterech obiektów znajdujących się w polu widzenia kamery

Rys. 8 - Rozpoznanie stworzonych dwóch prototypów o nazwach BOSH i TROJ spośród
pięciu obiektów znajdujących się w polu widzenia kamery (kolejne kolumny tabeli: nazwa
prototypu, procentowy stopień rozpoznania obiektu, 3 składowe transformacji obiektu, numer
indeksu obiektu i numer kamery wirtualnej obiektu)
Wyszukiwarka
Podobne podstrony:
GW CW03 Przyklad Transport
cw03-protokol, Politechnika Wrocławska Energetyka, III semestr, Materiały
pi cw03
cw03 PS
se cw03
ELEKTRONIKA cw03 id 424651 Nieznany
GW CW03 B Transport
cw03 przetwornik ADC id 122514 Nieznany
pi cw03
GW CW03 Przyklad
Laboratorium TWN - Cw03 - Badanie przekładników prądowych i napięciowych - Skrypt , Studia dzienne -
ćw03 Dysocjacja, In?ynieria Ruchu Morskiego, rok I, gr
Cw03 1, Akademia Morska, 1 rok, Fizyka, FIZYKA1, fiza
cw03
cw03
cw03
ELEKTRONIKA cw03(2)
więcej podobnych podstron