Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 1
Temat: CHWYTAKI MANIPULATORÓW I ROBOTÓW
Wprowadzenie
Chwytak jest zabudowany na końcu łańcucha kinematycznego manipulatora
zwykle na tzw. „kiści”. Jeżeli kiść nie występuje chwytak mocowany jest do
ramienia manipulatora. W niektórych przypadkach zamiast chwytaka
mocowane jest narzędzie robocze lub człon roboczy.
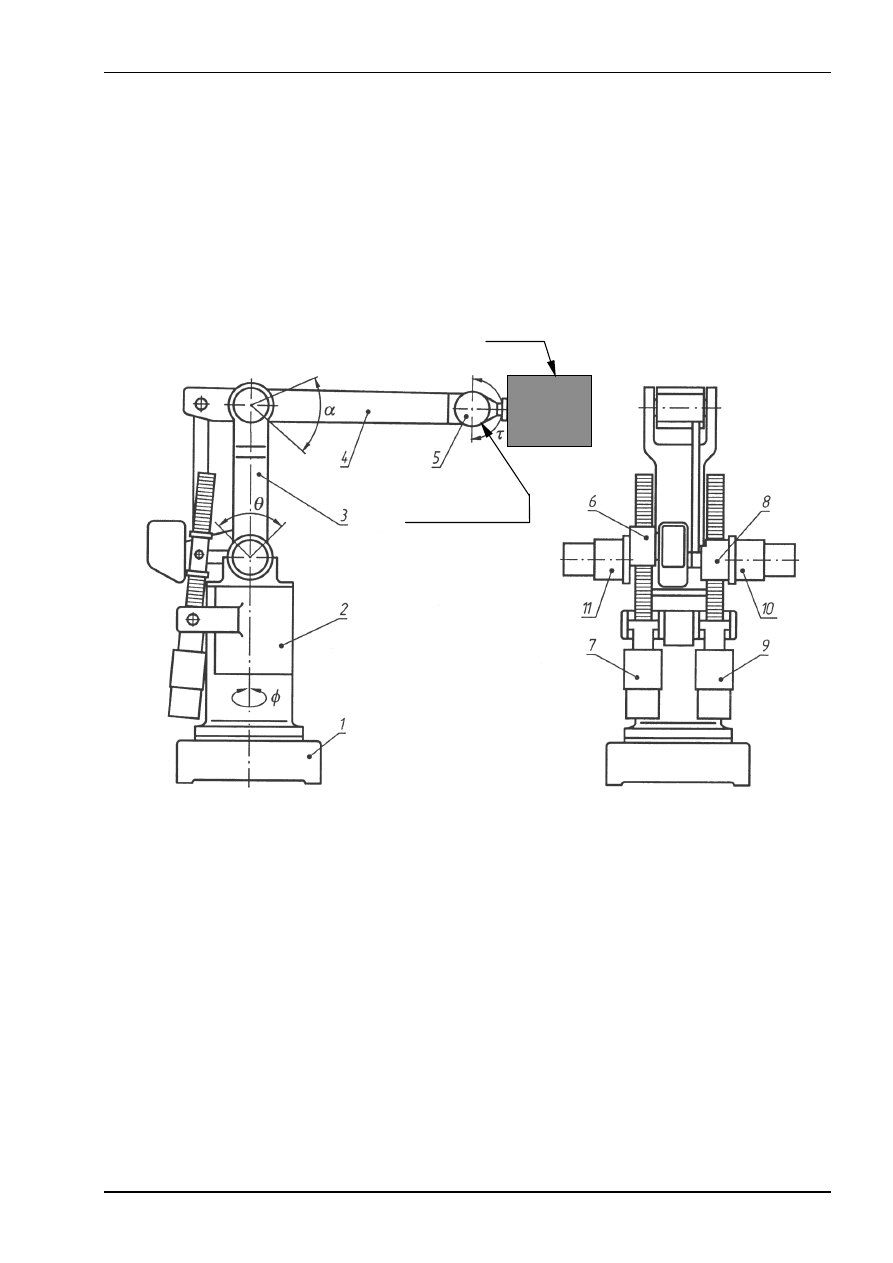
Miejsce zabudowy chwytaka
Kiść robota
Rys. 1. Miejsce zabudowy chwytaka w robocie IRb-6.
Zadania urządzenia chwytającego:
•
pobranie (uchwycenie) obiektu manipulacji w położeniu początkowym,
•
trzymanie obiektu w trakcie trwania czynności manipulacyjnych,
•
uwolnienie obiektu manipulacji w miejscu docelowym.
Unieruchomienie obiektu w chwytaku może być realizowane dwoma
sposobami:
•
poprzez wytworzenie układu sił działających na obiekt manipulacji
•
poprzez odjęcie obiektowi manipulacji wszystkich sześciu stopni
swobody odpowiednio ukształtowanymi końcówkami chwytaka.
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 2
Według kryterium sposobu uchwycenia obiektu manipulacji chwytaki można
podzielić na:
a) siłowe: naprężeniowe , adhezyjne,
b) kształtowe,
c) siłowo – kształtowe.
Chwytaki siłowe naprężeniowe wykorzystują wytworzoną za pośrednictwem
szczęk siłę tarcia, siłowe adhezyjne wykorzystują podciśnienie lub pole
elektromagnetyczne,
Chwytaki kształtowe obejmują przedmiot szczękami odpowiednio dobranym
kształcie nie powodując nacisku ,
Chwytaki siłowo – kształtowe wykorzystują zarówno siłę tarcia wywołaną
naciskiem szczęk jak i odpowiednie dopasowanie kształtu szczęk.
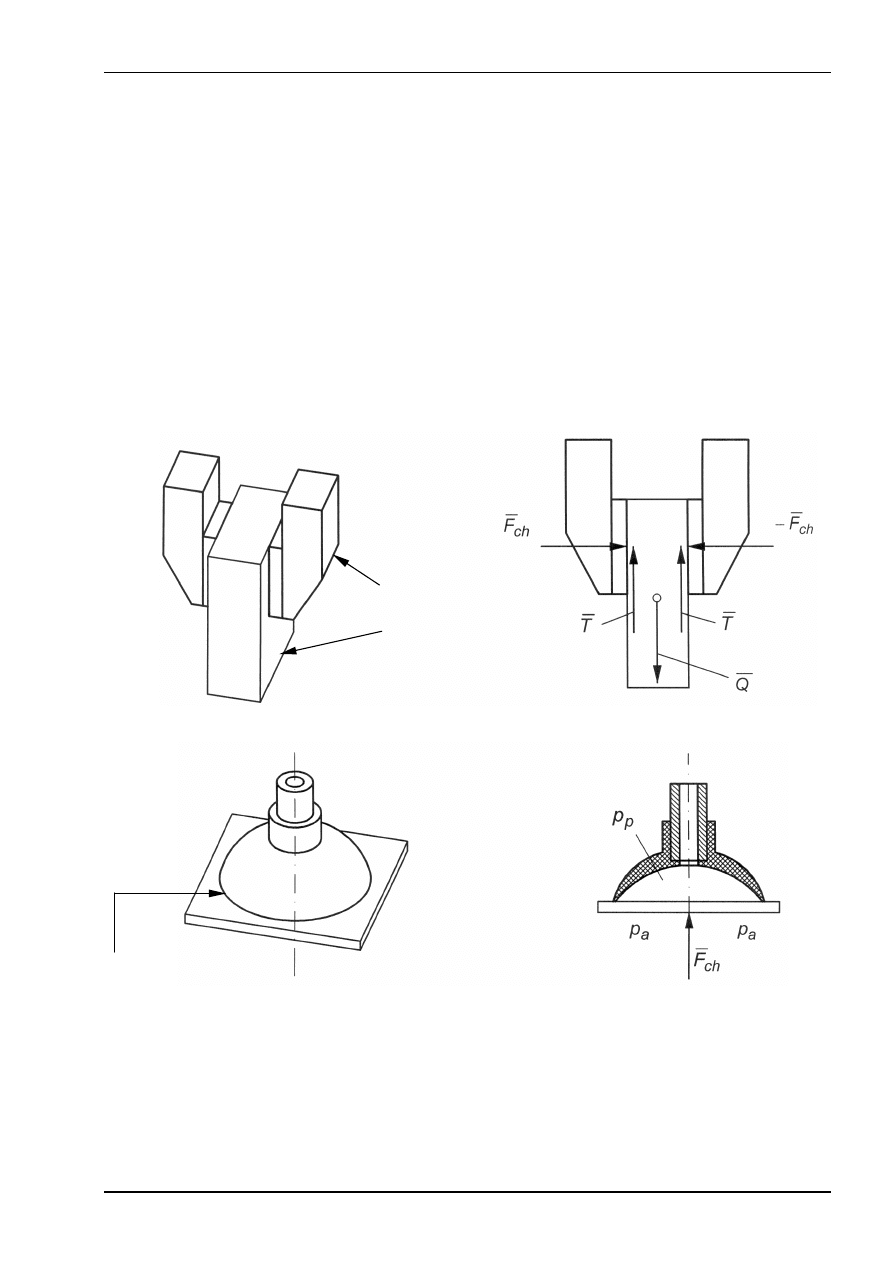
Szczęka
Przedmiot
Rys. 2. Zasada działania chwytaka siłowego naprężeniowego
Elastyczna przyssawka o powierzchni przylegania S
p
a
- ciśnienie atmosferyczne, p
p
-
podciśnienie, k
p
=0,85 -
współczynnik
uwzględniający nierównomierność przylegania i zmiany ciśnienia
Rys. 3. Zasada działania chwytaka siłowego podciśnieniowego
)
p
p
(
S
k
F
p
a
p
ch
−
⋅
=
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 3
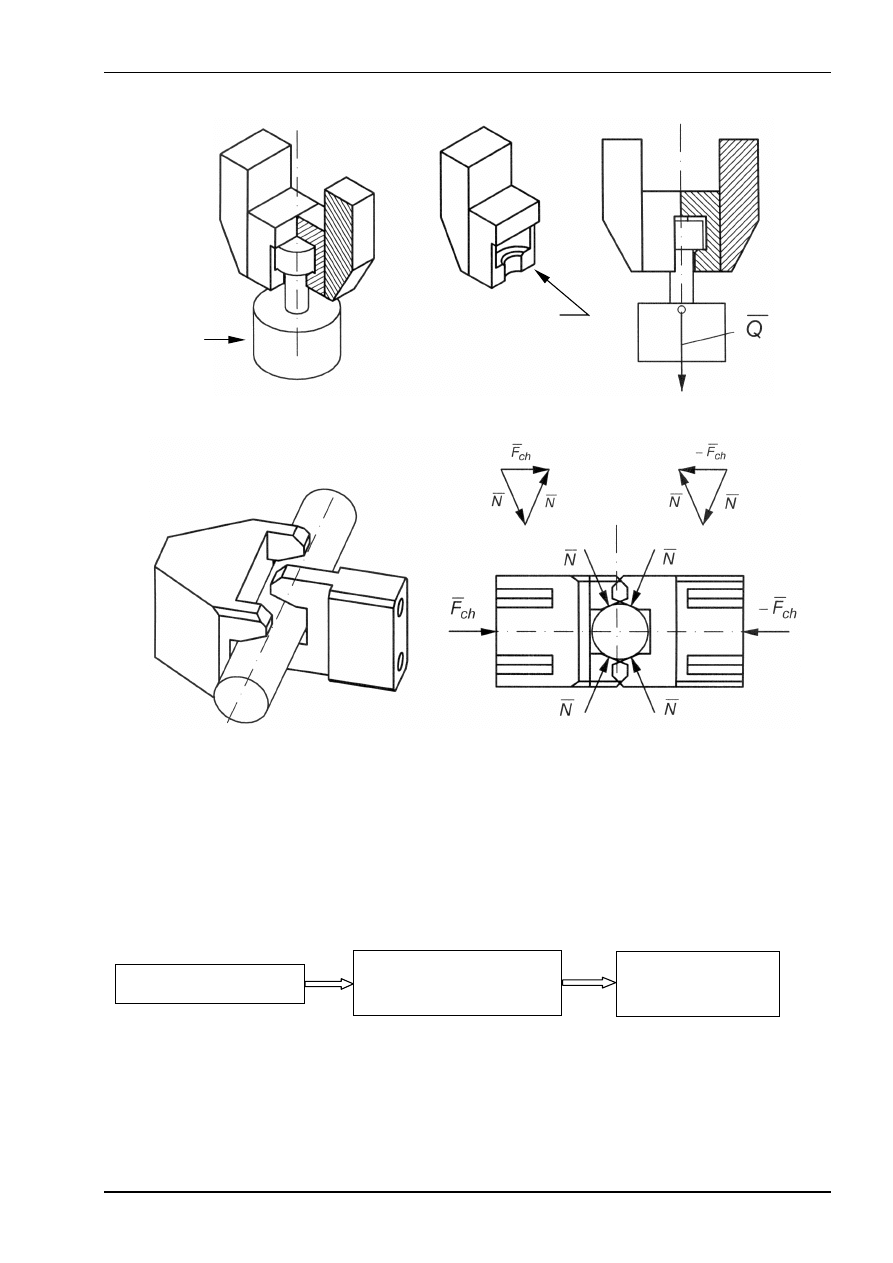
Szczęka kształtowa
Przedmiot
Rys. 4. Zasada działania chwytaka kształtowego
Rys. 5. Zasada działania chwytaka siłowo-kształtowego
W zależności od przyjętej zasady działania, łańcuchy kinematyczne
chwytaków będą się różnić . Można jednak przedstawić strukturę chwytaka w
postaci ogólnego schematu blokowego.
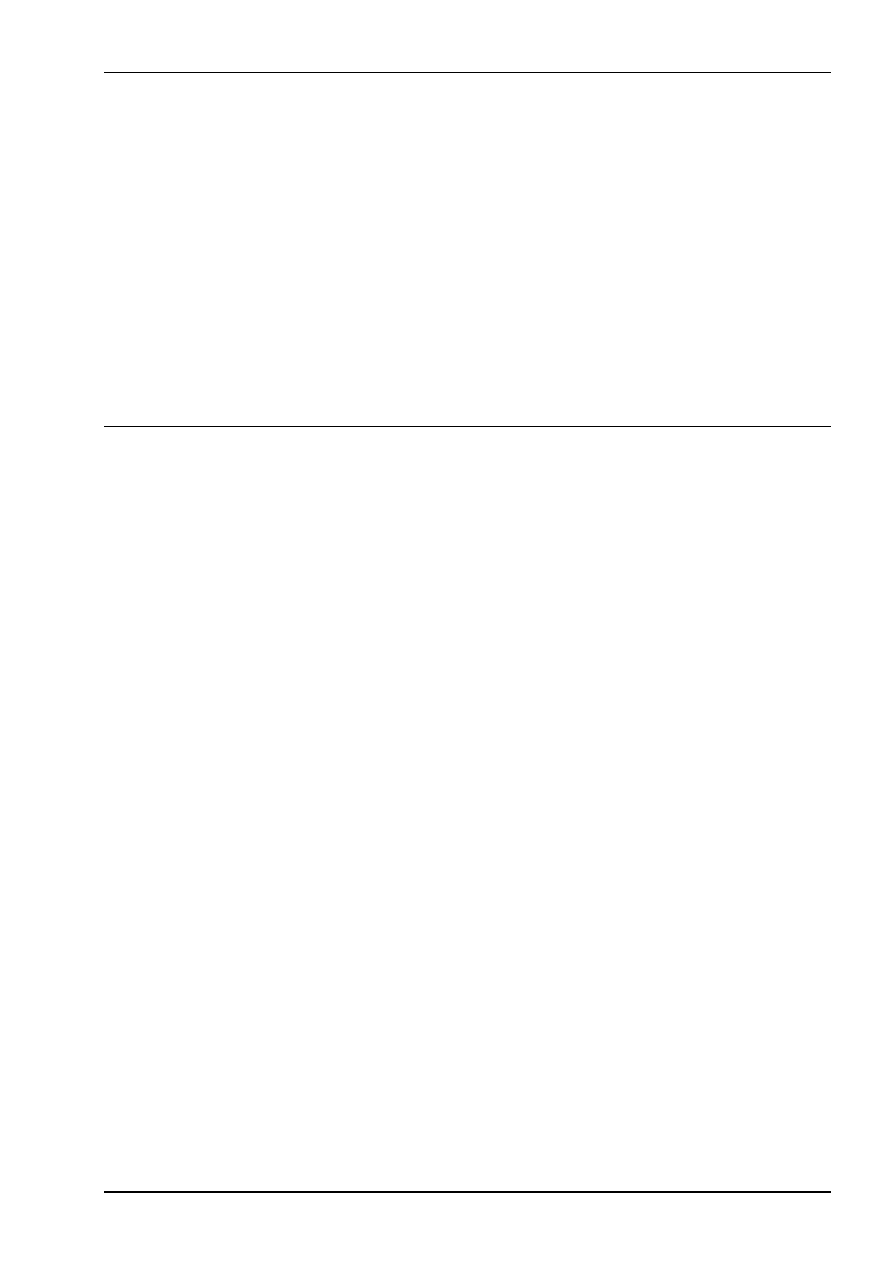
Ogólna struktura mechaniczna chwytaka
Typowe układy napędowe są to zwykle siłowniki pneumatyczne rzadziej
hydrauliczne lub silniki elektryczne.
Układ napędowy
Układ przeniesienia
napędu
Układ
wykonawczy
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 4
Układy przeniesienia napędu od źródła do końcówek chwytnych stanowią
mechanizmy: dźwigniowe, kołowe, cięgnowe oraz ich różnorodne
połączenie co pozwala na tworzenie wielkiej liczby rozwiązań chwytaków
występujących w praktyce.
Układ wykonawczy stanowią końcówki chwytne, które mogą być sztywne
lub podatne. Zwykle występują dwie końcówki chwytne. Czasem stosuje się
chwytak z trzema lub większą liczbą końcówek chwytnych. Najrzadziej
występują chwytaki z jedną ruchomą końcówką chwytną (druga końcówka
jest nieruchoma).
Standardowe wyposażenie robotów obejmuje zwykle sam chwytak
z niekompletnymi końcówkami chwytnymi. W zależności od potrzeb
użytkownik sam dobiera odpowiednie nasadki uwzględniając różne cechy
manipulowanego przedmiotu: rozmiary, kształt, i inne.
TYPOWE UKŁADY PRZENIESIENIA NAPĘDÓW CHWYTAKÓW
SCHEMATY KINEMATYCZNE CHWYTAKÓW
Układ przeniesienia napędu jest łańcuchem kinematycznym, który
można klasyfikować wg różnych kryteriów. Jeżeli np. jako kryterium
klasyfikacji przyjmiemy rodzaj mechanizmu występującego w łańcuchu
kinematycznym, to mamy mechanizmy: klinowe, dźwigniowe, krzywkowe,
zębate, cięgnowe itp.
Ważnym kryterium klasyfikacji może być rodzaj par kinematycznych
występujących w łańcuchu kinematycznym chwytaka.
W chwytakach posiadających strukturę mechanizmów płaskich mogą
mianowicie występować tylko pary kinematyczne klasy 5, klasy 4 oraz tzw.
pary śrubowe. (Wykład pt. Struktura mechanizmów).
Najczęściej stosowane są chwytaki w których występują wyłącznie pary
klasy 5. Pary te występują w dwóch postaciach jako : pary obrotowe
i pary postępowe.
Jeżeli w łańcuchu kinematycznym chwytaka występuje para kinematyczna
klasy 4 to realizuje funkcje dwóch par klasy 5, obrotowej i postępowej.
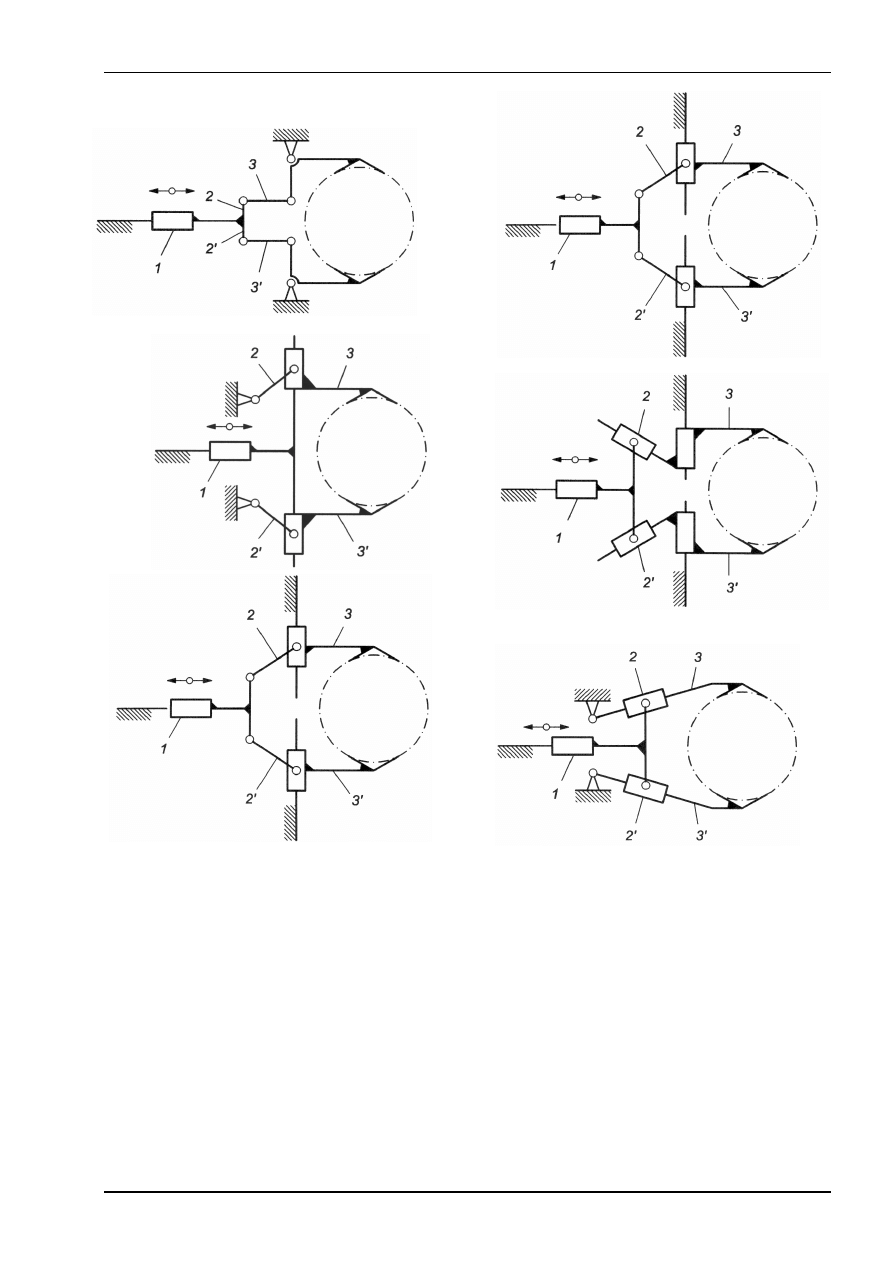
W celu symbolicznego zapisu struktury mechanizmów chwytaków
zastosowano następujące oznaczenia, (rys. 6):
N - człon napędzający,
O - para kinematyczna obrotowa,
P - para kinematyczna postępowa,
Os - para kinematyczna utworzona przez podstawę i obracający się suwak
Op - para kinematyczna utworzona przez podstawę i obracającą się
prowadnicę.
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 5
P-(O-O-O)
P-(O-O-P)
P-(P-O-O)
P-(O-P-P)
P-(O-O-P)
P-(O-P-Op)
Rys. 6. Wybrane warianty strukturalne chwytaka
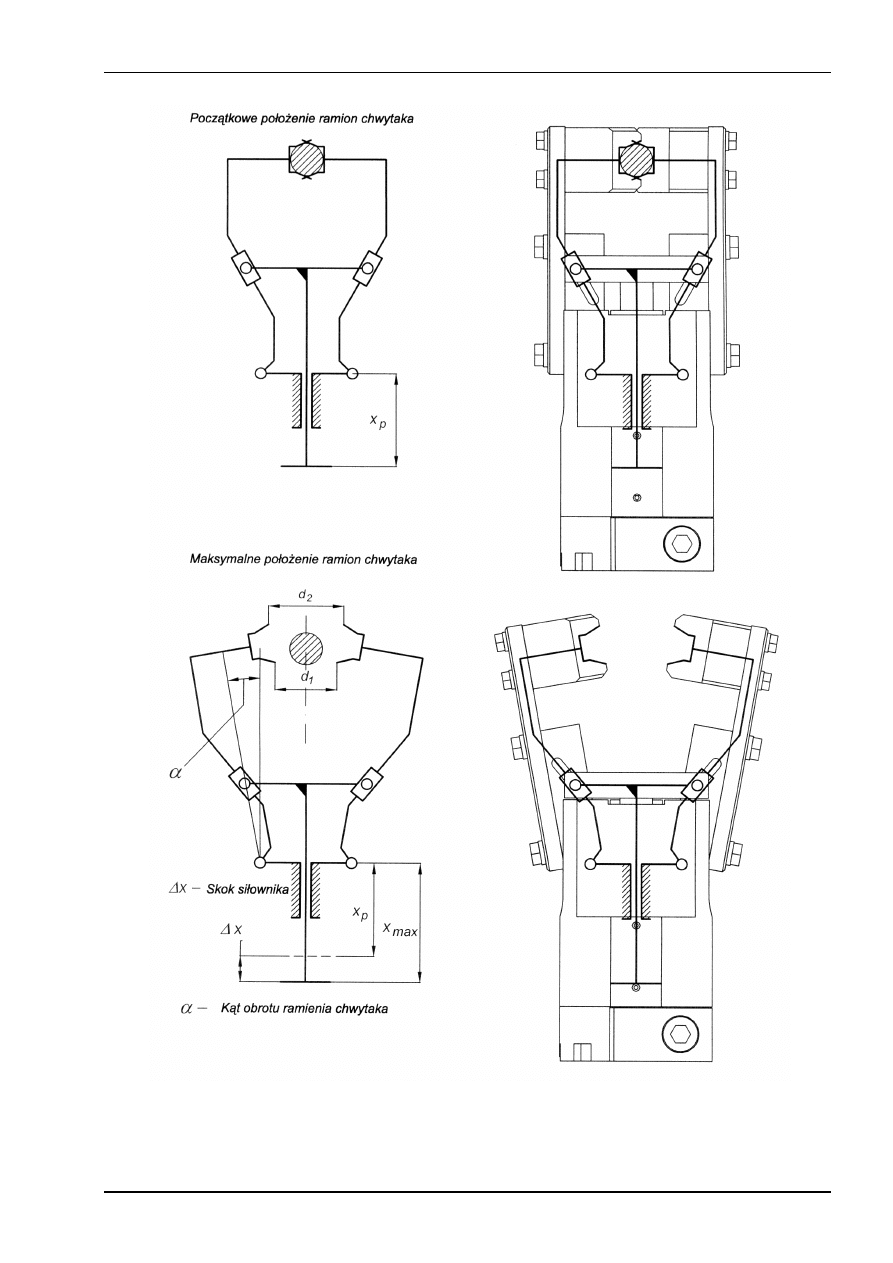
KONSTRUOWANIE CHWYTAKA NA PODSTAWIE ZADANEGO
SCHEMATU KINEMATYCZNEGO
Konstruowanie chwytaka rozpoczynamy od ustalenia początkowego
i końcowego (maksymalnego) położenia szczęk chwytaka. Jeżeli schemat
kinematyczny narysujemy w podziałce to wówczas możemy rozpocząć
kształtowanie postaci konstrukcyjnej chwytaka, nakładając na jego
schemat kinematyczny rzuty płaskie elementów konstrukcyjnych. Następnie
rysując rzuty boczne dochodzimy do postaci trójwymiarowej.
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 6
Chwytak typu P-(O-P-Op)
Rys. 7. Konstruowanie chwytaka na podstawie schematu kinematycznego
Zapis i Podstawy Konstrukcji Mechanicznych. Chwytaki manipulatorów i robotów
Opracował: J. Felis str. 7
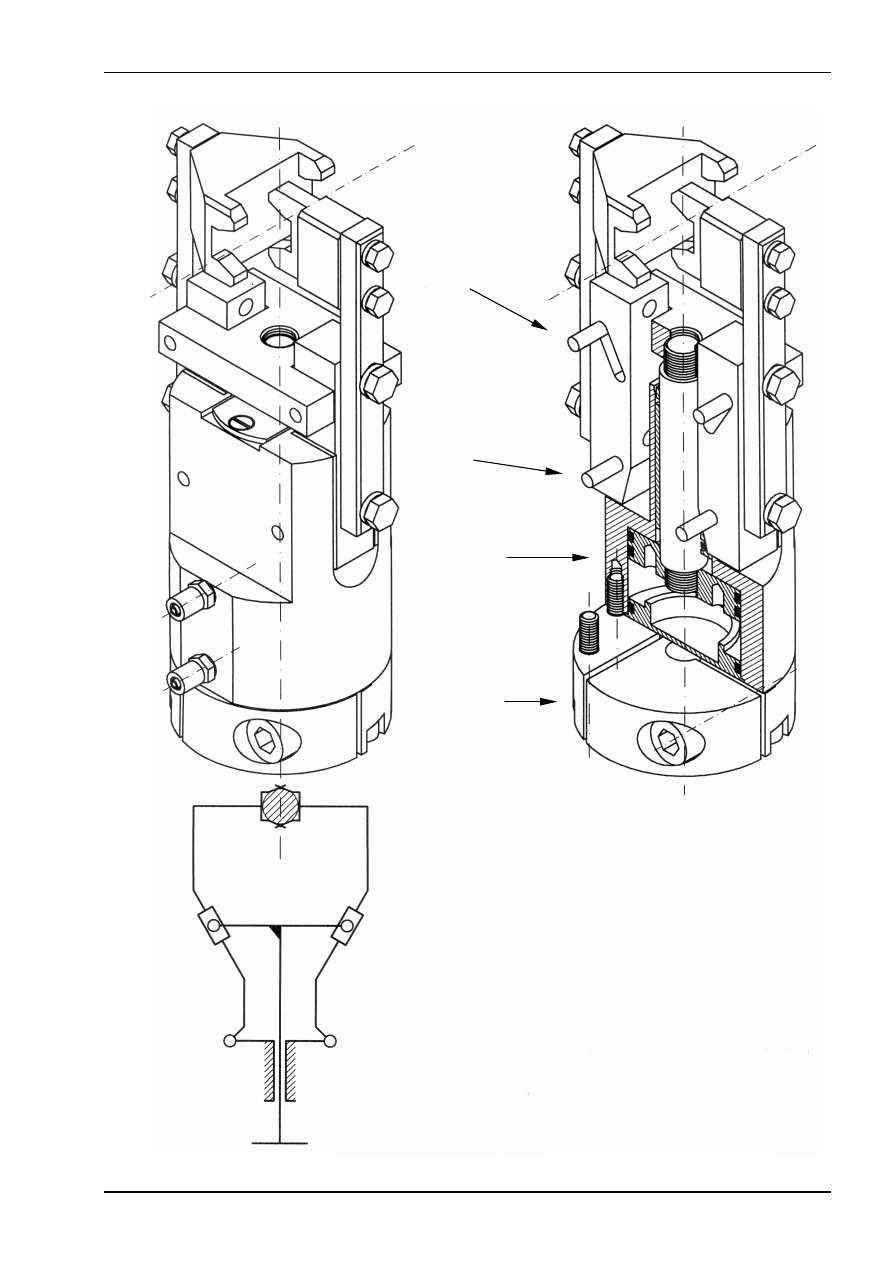
Para
kinematyczna
kl. 4
Para
kinematyczna
kl. 5
Siłownik
pneumatyczny
Element
mocujący
Uwaga: W rozwiązaniu konstrukcyjnym
chwytaka zastosowano w miejsce dwóch
par kinematycznych kl. 5 jedną parę
kinematyczną kl. 4.
Rys. 8. Rysunek aksonometryczny chwytaka
typu N-(O-P-Op) z siłownikiem pneumatycznym
i elementem mocującym
Wyszukiwarka
Podobne podstrony:
CHRAPEK,podstawy robotyki, Urz dzenia chwytaj ce i g owice technologiczne robotów przemys owych cz 2
projekt robotyka chwytaki
(URZYDZENIA CHWYTAJYCE ROBOTÓW PRZEMYSLOWYCH)
I2 Elastyczny system wymiany chwytaków
piosenki z chwytami gitary sto lat
chwytakaaa, projekty
projekt chwytaka 21, AGH WIMIR AiR, Semestr 6, RP, projekt chwytak, czyjeś, chwytak
STOLBUD CHWYTAK, WÓZKI WIDŁOWE WIADOMOŚCI TESTY 2009 NA EGZAMIN, DOKUMENTY UDT
Chwytak 2 (2)
Chwytak robotyka
Depilujący nici się chwyta
Koparki chwytakowe, przedsiebierne i ladowarki sciaga
chwytak w
projekt 1 chwytaki projekt
PAR wyklad 2 3 chwytaki
Projekt techniczny chwytaka przykład v03
projekt 1, chwytaki projekt
LEDNICA- śpiewnik, Śpiewniki i piosenki z chwytami
więcej podobnych podstron