WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
1
Warszawa 2013
ppłk dr inż. Wojciech KACZMAREK
tel. 022 683 72 83
kom. 604 529 718
pokój 31 budynek 63
Wojciech.Kaczmarek@wat.edu.pl
PODSTAWY ROBOTYKI
EFEKTORY ROBOTÓW PRZEMYSŁOWYCH
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
2
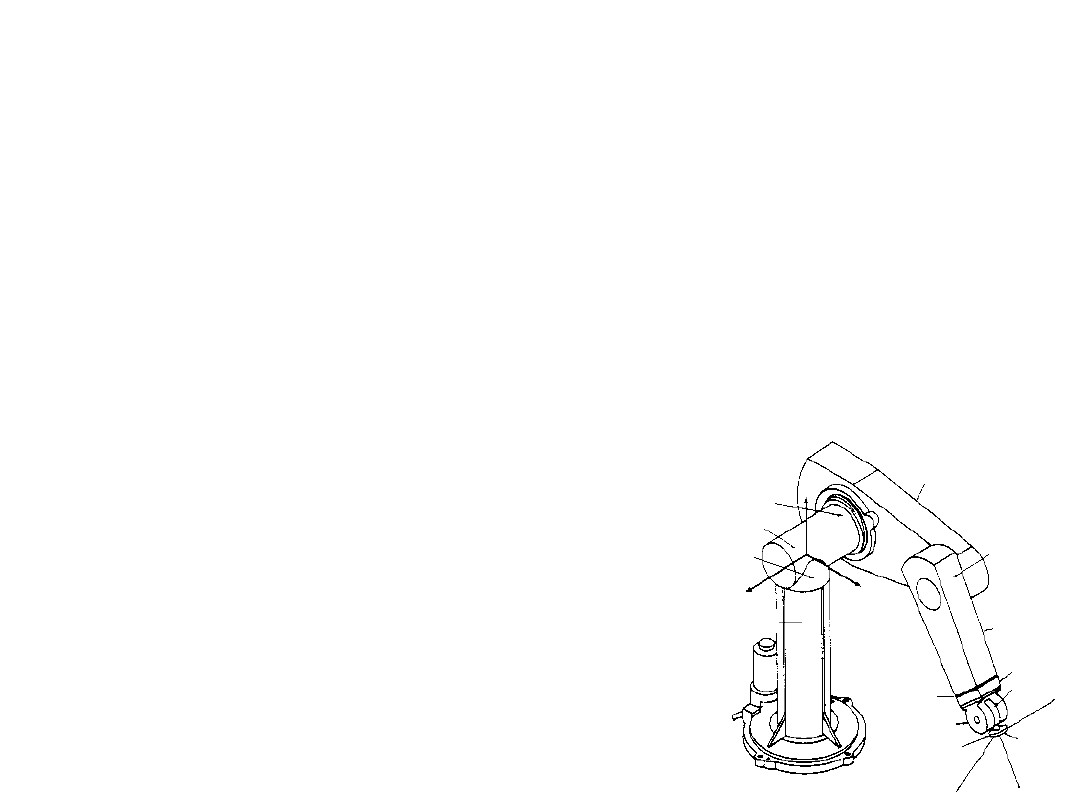
Kiścią sferyczną lub sprzęgiem manipulatora nazywa się przegub
pomiędzy ramieniem a dłonią.
Przeguby kiści są prawie zawsze obrotowe.
Wiele manipulatorów wyposażonych jest w kiść sferyczną, której osie
przegubów przecinają się w jednym punkcie.
KIŚĆ ROBOTA:
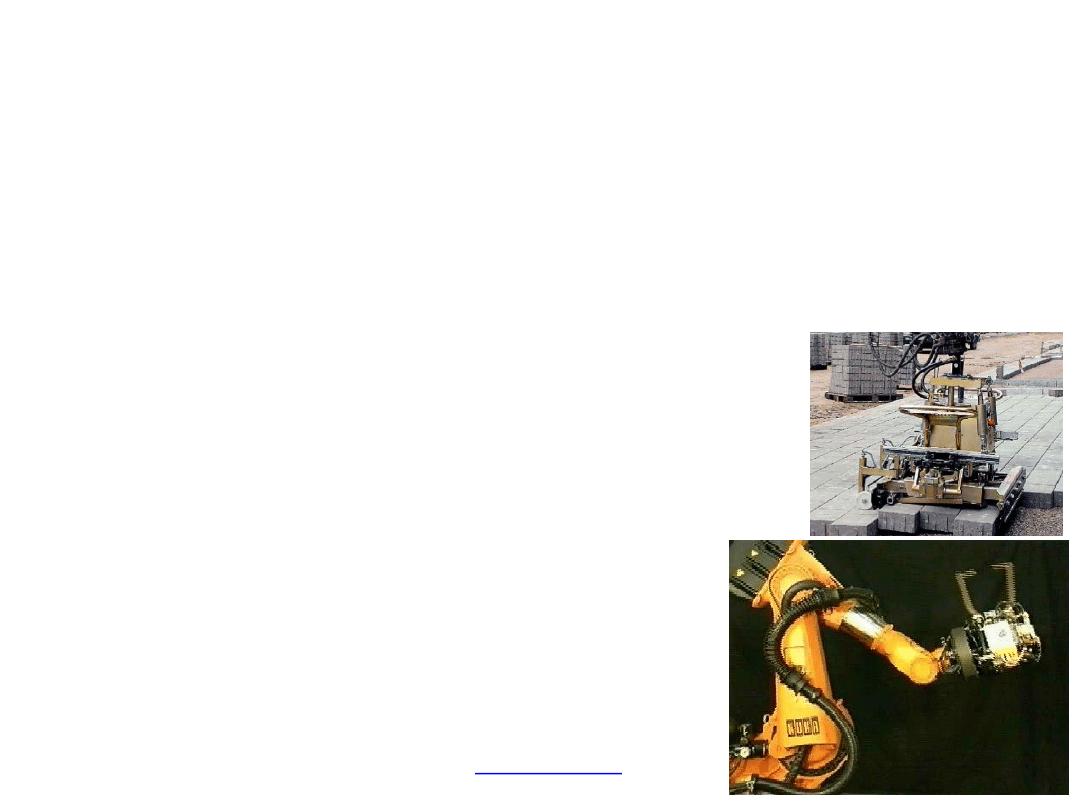
Uważa się, iż jednym z najważniejszych
elementów manipulatora jest końcówka robocza.
Ramię 0
Ramię 1
Ramię 2
Ramię 3
Kiść 4
Złącze 1
Złącze 2
Złącze 3
Złącze 4
Złącze 5
Złącze 6
Kiść 5
Kiść 6
x
y
z
x
z
y
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
3
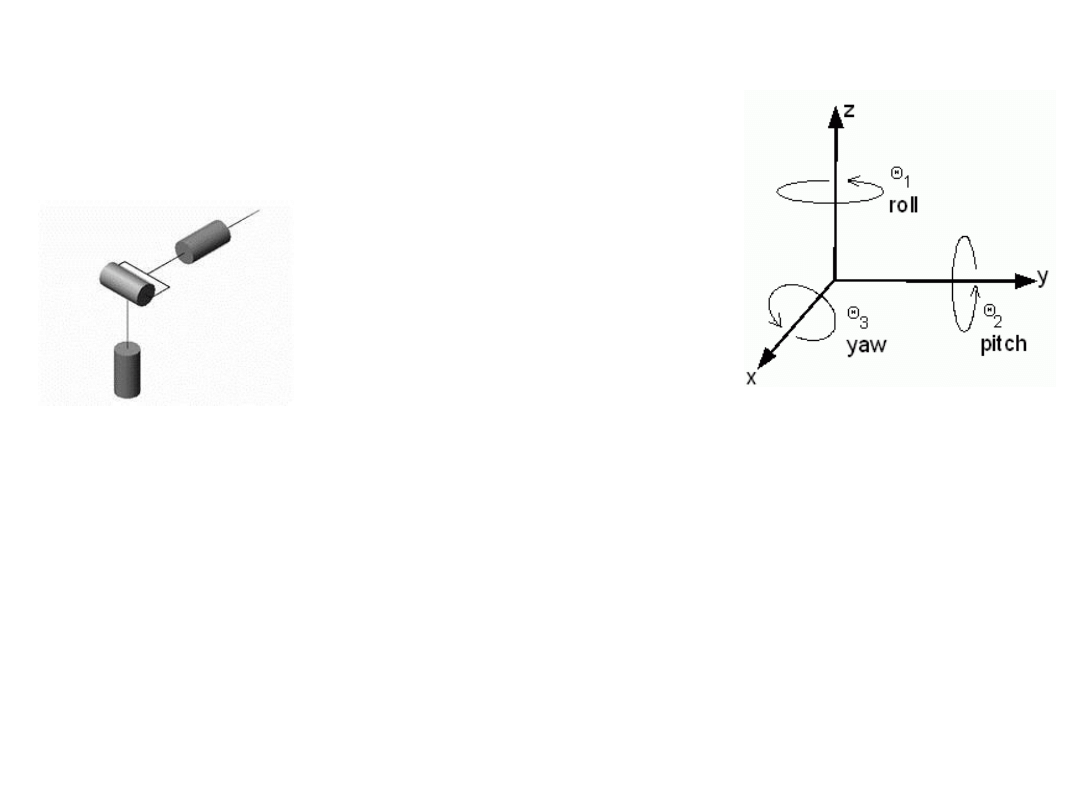
Schemat kiści sferycznej
KIŚĆ ROBOTA:
Kiść o takiej strukturze w dużym stopniu upraszcza analizę
kinematyki manipulatora oraz pozwala w prosty sposób
rozdzielić pozycjonowanie i orientowanie obiektu.
odchylenie (yaw)
nachylenie (pitch)
obrót (roll)
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
4
Efektory końcowe robotów przemysłowych:
• chwytaki
• narzędzia specjalistyczne (np. pistolet, zgrzewadło, nożyce).
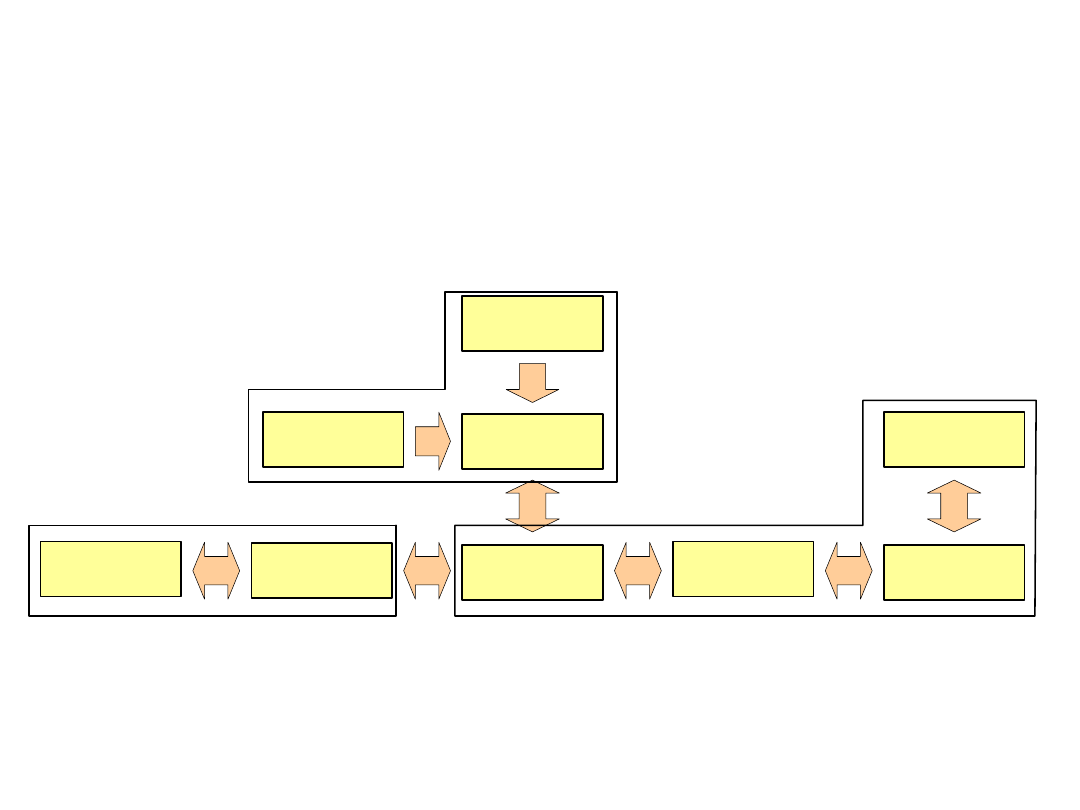
EFEKTORY ROBOTÓW:
Połączenie pomiędzy robotem i efektorem jest realizowane najczęściej za
pomocą czterech komponentów:
• kołnierza robota
• napędu
• kinematyki efektora
• systemu chwytaka (typ chwytania np. kształtowe).
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
5
EFEKTORY ROBOTÓW:
Kontroler
Czujniki
Program
Napęd
Kołnierz
Kinematyka
efektora
System
chwytaka
Przedmiot
Manipulator

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
6
CHWYTAKI ROBOTÓW:
Do głównych zadań robotów przemysłowych należy zaliczyć transport.
Zadanie transportowania obiektu przez maszynę manipulacyjną składa się
z trzech elementarnych czynności:
• uchwycenia obiektu
• trzymania obiektu w trakcie jego transportowania
• uwolnienia obiektu w miejscu docelowym

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
7
CHWYTAKI ROBOTÓW:
Chwytak jest urządzeniem nakładającym na transportowany obiekt
tyle ograniczeń swobody ruchu, ile jest niezbędnych do
zapewnienia odpowiedniego przebiegu transportowania.
Odpowiednie uchwycenie obiektu umożliwia:
• jednoznaczne ustalenie jego pozycji i orientacji
względem ramienia robota
• precyzyjne nim manipulowanie
Ogromna różnorodność obiektów manipulacji sprawiła, że chwytaki są
obecnie najbardziej zróżnicowanym konstrukcyjnie zespołem maszyny.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
8
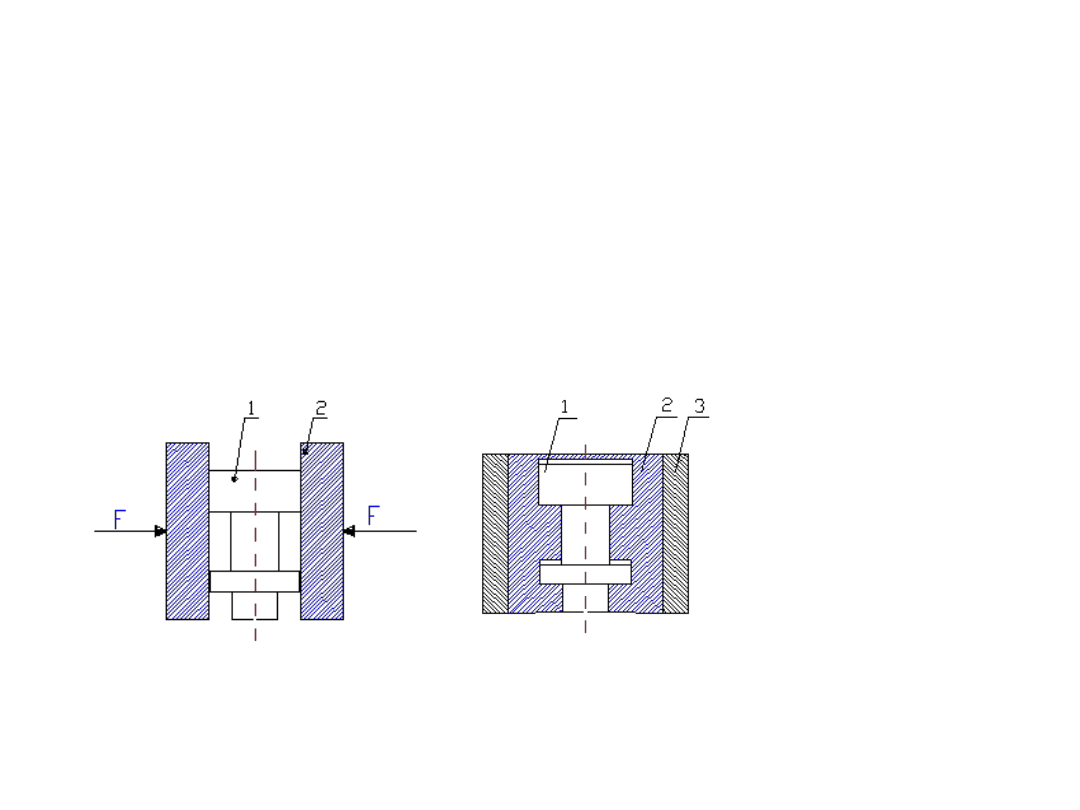
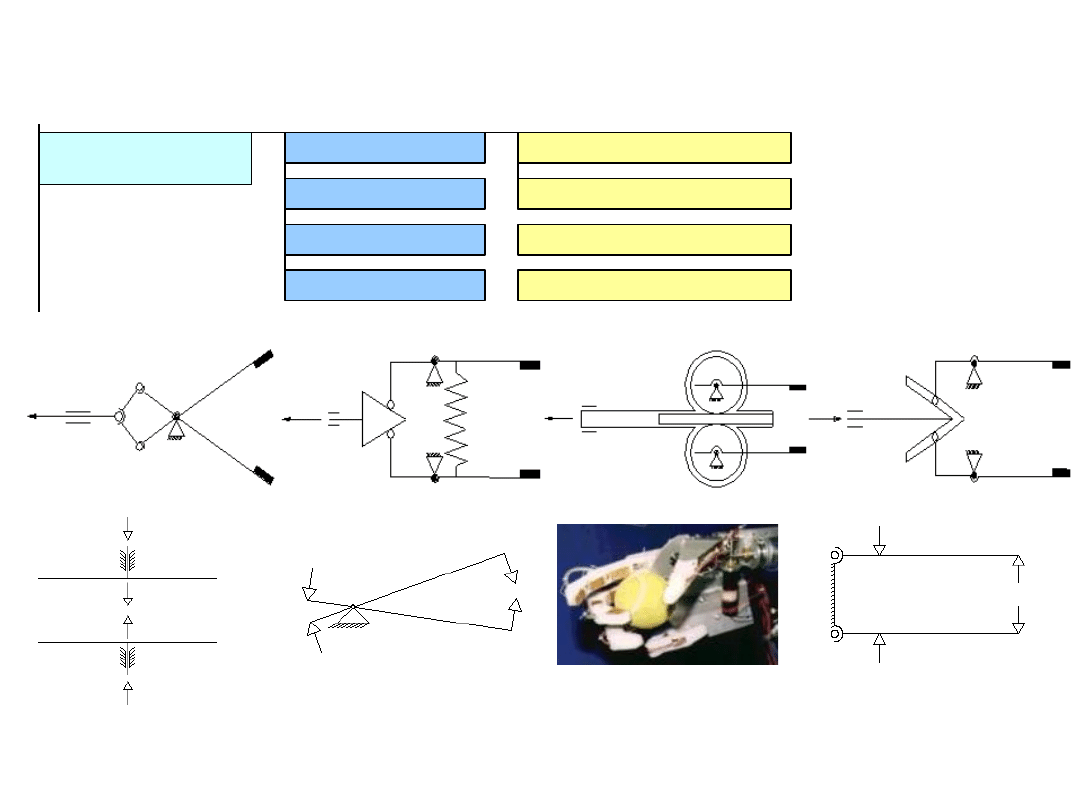
CHWYTAKI ROBOTÓW:
Ograniczenia swobody ruchu transportowego obiektu:
• chwytanie siłowe - wytworzenie pola sił działających na obiekt
• chwytanie kształtowe - wytworzenie połączeń między elementami
chwytaka i obiektem, których więzy odbierają obiektowi żądaną liczbę
stopni swobody
• chwytanie siłowo-kształtowe
1. obiekt manipulacji
Chwytanie siłowe
Chwytanie kształtowe
3. elementy chwytające
2. nasadki na obiekt
2. elementy chwytające
1. obiekt manipulacji

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
9
CHWYTAKI ROBOTÓW:
Czynniki mające zasadniczy wpływ na uchwycenie obiektu:
• właściwości obiektu manipulacji
• właściwości chwytne chwytaka
• błąd wzajemnego ustawienia obiektu i chwytaka
Właściwości obiektu manipulacji:
• masa
• położenie środka ciężkości
• moment bezwładności
• kształt i parametry geometryczne
• tolerancje wykonania miejsc uchwycenia
• odporność na naprężenia zewnętrzne

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
10
CHWYTAKI ROBOTÓW:
Wymagania stawiane chwytakom można podzielić na:
• główne:
• możliwość chwytania obiektów bez względu na ich właściwości
• dodatkowe:
• mała waga, aby minimalizować statyczne i dynamiczne naprężenia
robota
• małe rozmiary, aby minimalizować przestrzeń roboczą wymaganą dla
chwytaków
• zdefiniowane siły chwytania
• niezawodność, pewność uchwycenia
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
11
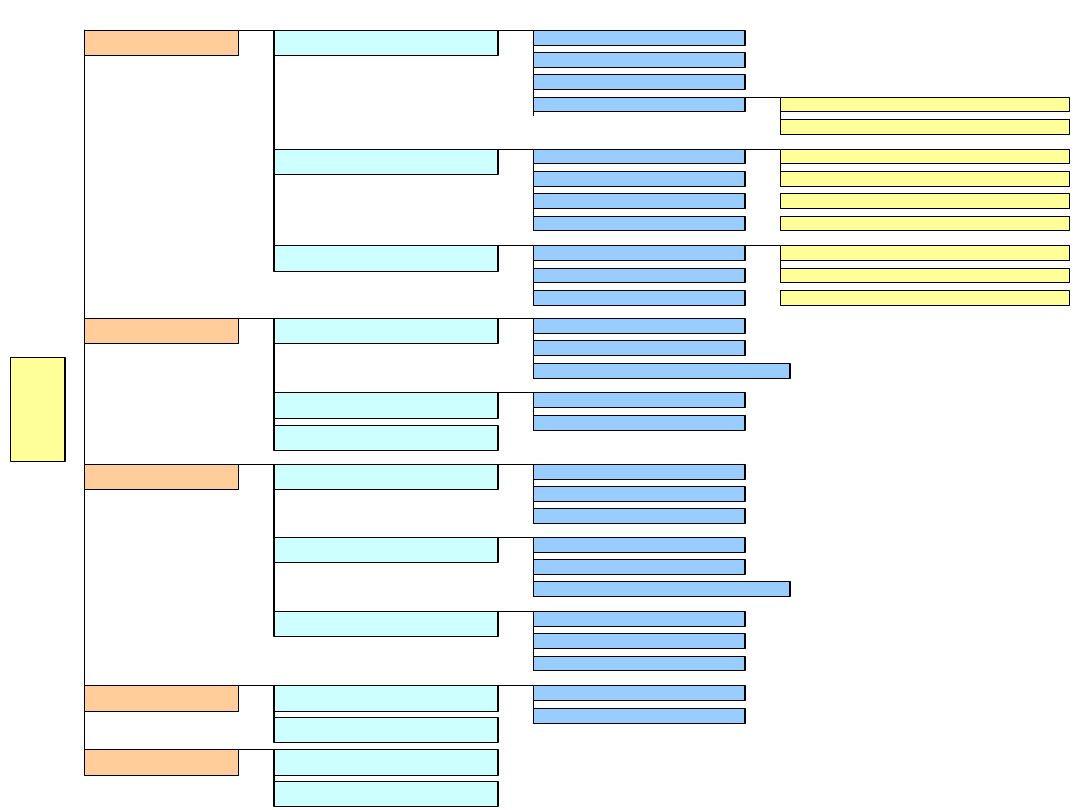
Typ
y c
hw
yta
ków
rob
otó
w
prz
em
ysł
ow
ych
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
12
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
T
yp
y
ch
w
yt
a
kó
w
r
o
b
o
tó
w
p
rz
e
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
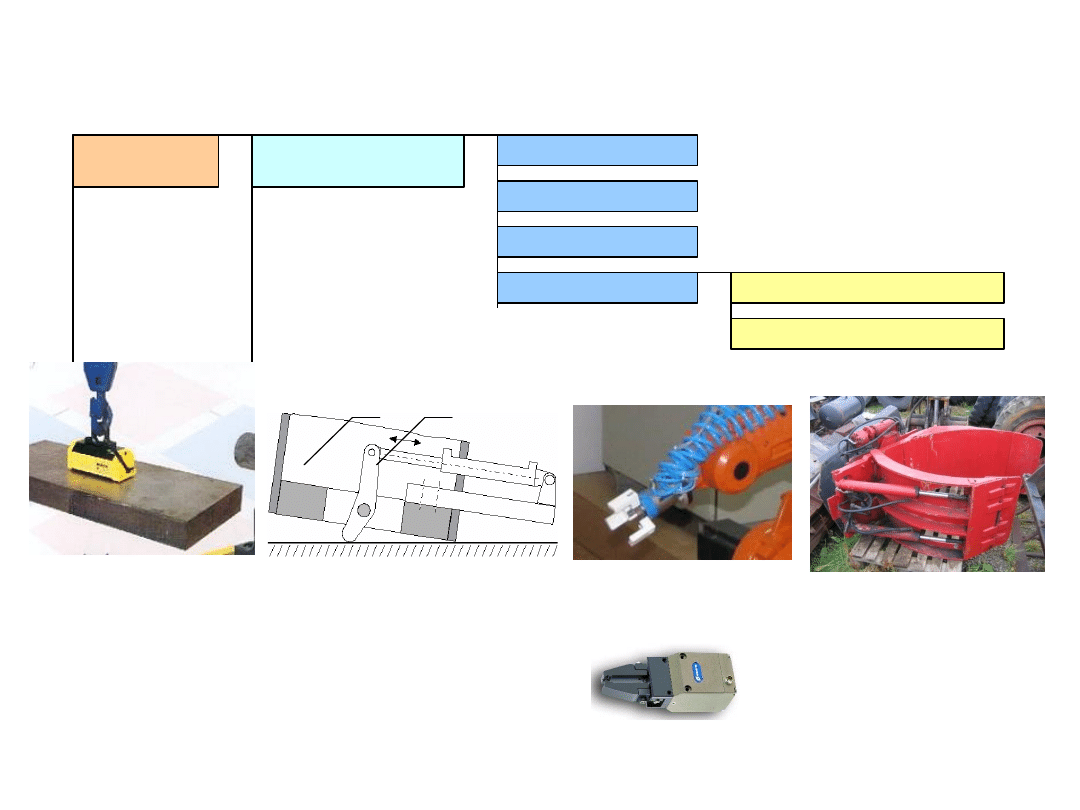
Chwytak
elektromagnetyczny
bez zwolnienia
pneumatycznego
1
2
Chwytak
elektromagnetyczny
ze zwolnieniem
pneumatycznym
Chwytak
pneumatyczny
Chwytak
hydrauliczny
(do drzewa)
Chwytak elektryczny
MEG
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
13
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
T
yp
y
ch
w
yt
a
kó
w
r
o
b
o
tó
w
p
rz
e
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
Nożycowy sposób
przemieszczania
końcówek chwytnych
Szczypcowy sposób
przemieszczania
końcówek chwytnych
Imadłowy sposób
przemieszczania
końcówek chwytnych
napęd dźwigniowy
napęd klinowy
napęd zębaty
napęd linowy
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
14
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
T
yp
y
ch
w
yt
a
kó
w
r
o
b
o
tó
w
p
rz
e
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
1
2
3
4
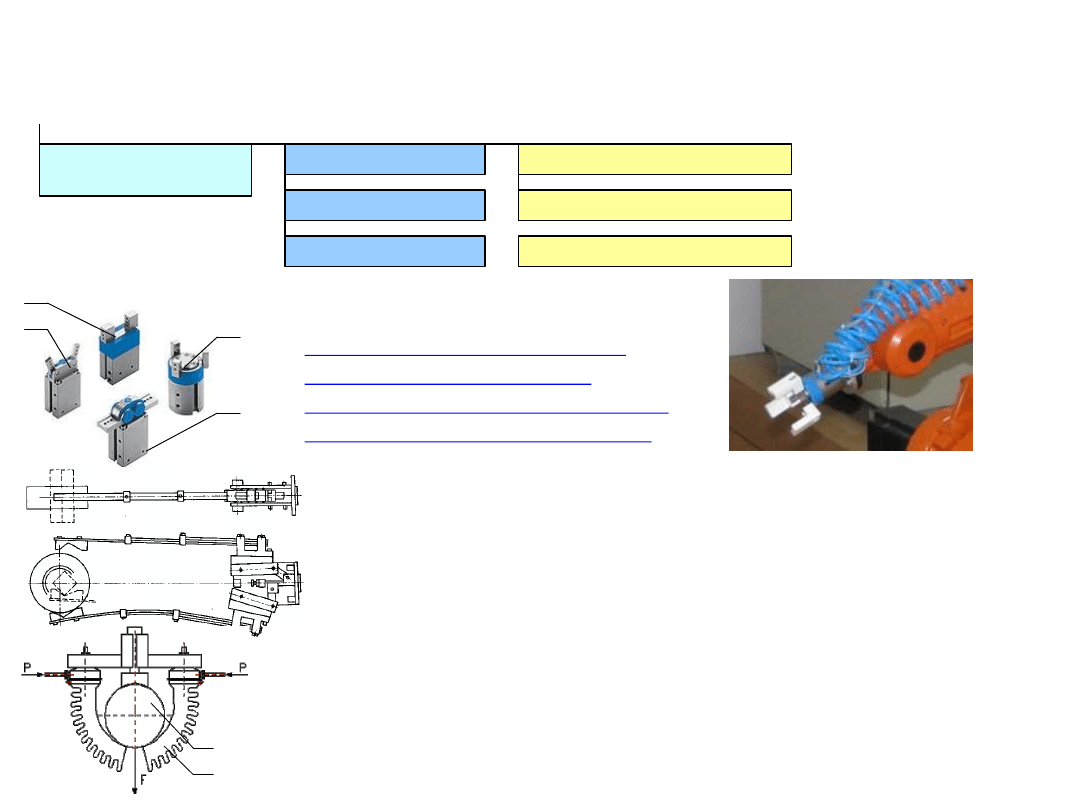
Chwytaki firmy FESTO:
1-
2-
3-
4-
Chwytak z końcówkami sprężystymi
1
2
Chwytak z końcówkami elastycznymi
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
15
T
yp
y
ch
w
yt
a
kó
w
r
o
b
o
tó
w
p
rz
e
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
16
T
yp
y
ch
w
yt
a
kó
w
r
o
b
o
tó
w
p
rz
e
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
17
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
Chwytak do chwytu
wewnętrznego
Chwytak do chwytu
zewnętrznego
Podział chwytaków ze względu na parametry użytkowe:
• chwytu zewnętrznego
• chwytu wewnętrznego.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
18
T
yp
y
ch
w
yt
ak
ów
r
ob
ot
ów
pr
ze
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
Czujnik
odległości
Pomiar siły
i momentów
Czujnik orientacji
Czujnik
zbiżeniowy
Czujnik
pozycji
Czujnik
dotykowy
Końcówki chwytne
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
19
T
yp
y
ch
w
yt
ak
ów
r
ob
ot
ów
pr
ze
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
20
T
yp
y
ch
w
yt
ak
ów
r
ob
ot
ów
pr
ze
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
21
T
yp
y
ch
w
yt
ak
ów
r
ob
ot
ów
pr
ze
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
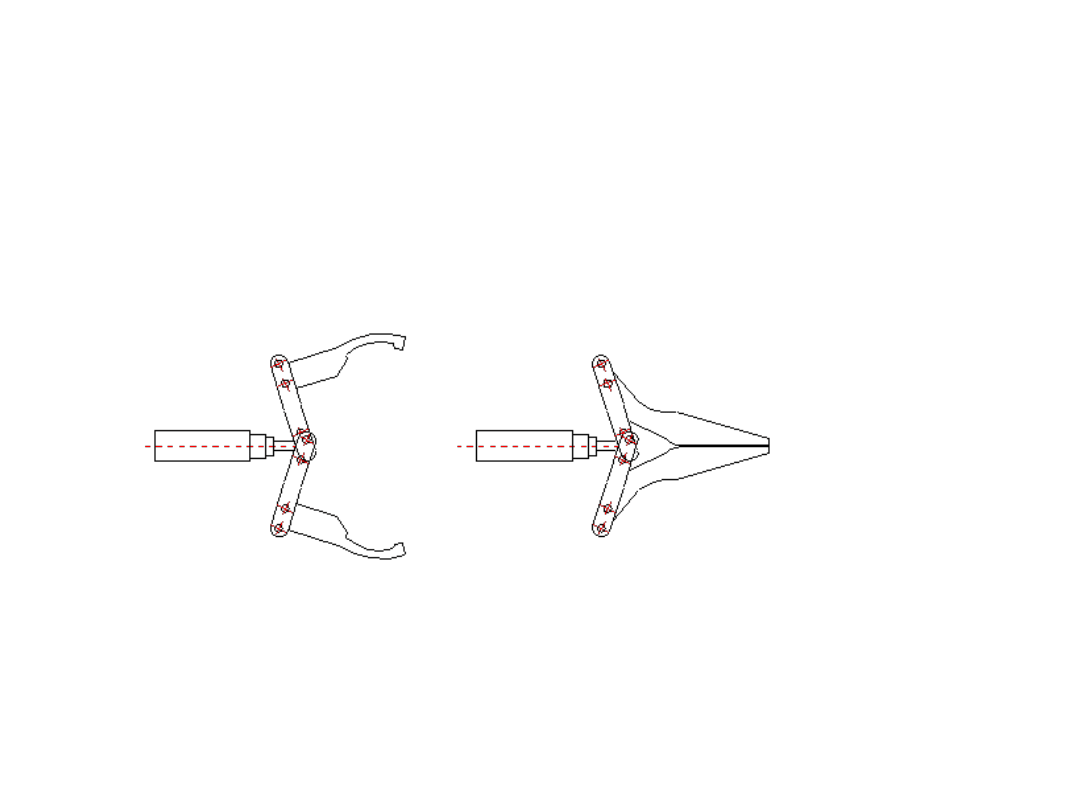
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
Chwytak siłowy
Chwytak kształtowy
• siłowe – chwytają obiekt wywierając na niego odpowiednie siły
• kształtowe – chwytają obiekt tworząc połączenia między elementami chwytnymi
i obiektem
• siłowo–kształtowe – są połączeniem obu powyższych.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
22
T
yp
y
ch
w
yt
ak
ów
r
ob
ot
ów
pr
ze
m
ys
ło
w
yc
h
Budowa
Układ napędowy
Układ przeniesienia
napędu
Układ wykonawczy
Parametry
użytkowe
Siła chwytu
Wymiary obiektu
Czas uchwycenia
Pneumatyczny
Hydrauliczny
Elektryczny
Elektromagnetyczny
Adhezyjny
Ze zwolnieniem pneumatycznym
Bez zwolnienia pneumatycznego
Dźwigowy
Klinowy
Zębaty
Linowy
Z imadłowym typem końcówki
Z nożycowym typem końcówki
Z palcowym typem końcówki
Z opisującym typem końcówki
Końcówki sztywne
Końcówki sprężyste
Końcówki elastyczne
Dwupalcowe
Trójpalcowe
Wielopalcowe
Stała
Nastawialna
Regulowana automatycznie
Maksymalne
Minimalne
Wyposażenie
dodatkowe
Urządzenia sensoryczne
Mechanizmy pomocnicze
Czujnik dotyku
Czujnik zbliżenia
Czujnik temperatury
Elastycznego docisku
Obrotu
Przemieszczenia liniowego
Urządzenia
technologiczne
Obcinak
Zdmuchiwacz
Spryskiwacz
Sposób
chwytania
Siłowy
Siła nacisku
Siła przylegania
Kształtowy
System
zamocowania
Ręczny
Automatyczny
I KRYTERIUM
PODZIAŁU
II KRYTERIUM
PODZIAŁU
CHWYTAKI ROBOTÓW - KLASYFIKACJA:
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
23
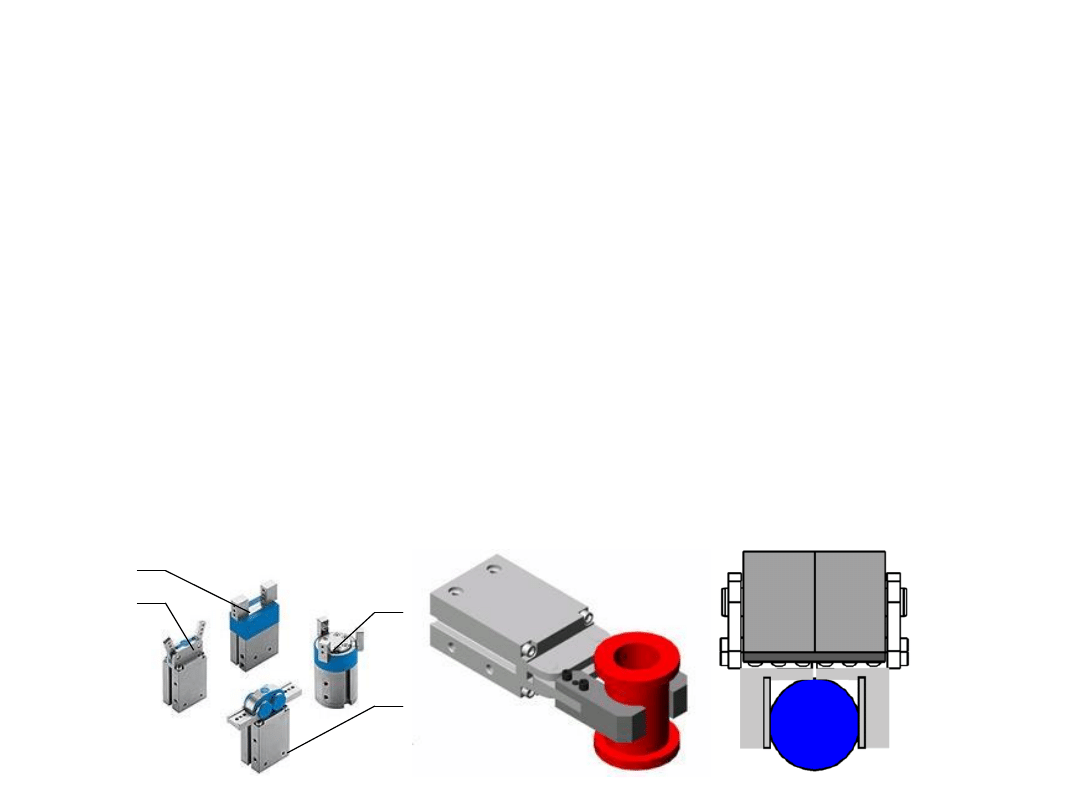
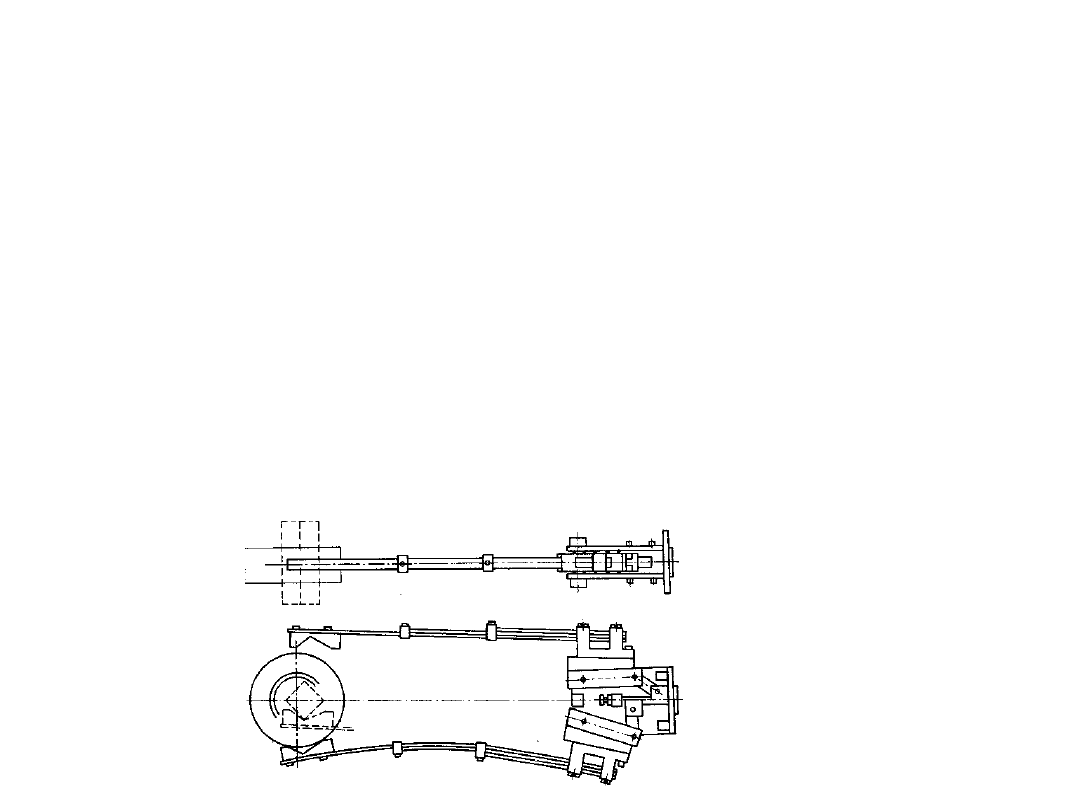
CHWYTAKI Z KOŃCÓWKAMI SZTYWNYMI
Cechy:
• Sztywno zamocowane, do korpusu chwytaka elementy chwytne dają pewny
chwyt manipulowanego obiektu.
• Dzięki wymiennym nakładką dają się łatwo dostosowywać do różnego typu
kształtów.
• Elementy
chwytne mogą być typu równoległego, kątowego czy
promieniowego.
Chwytaki ze sztywnymi końcówkami umożliwiają zazwyczaj chwytanie
obiektów o wymiarach różniących się od wymiaru nominalnego o około
±10%.
1
2
3
4
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
24
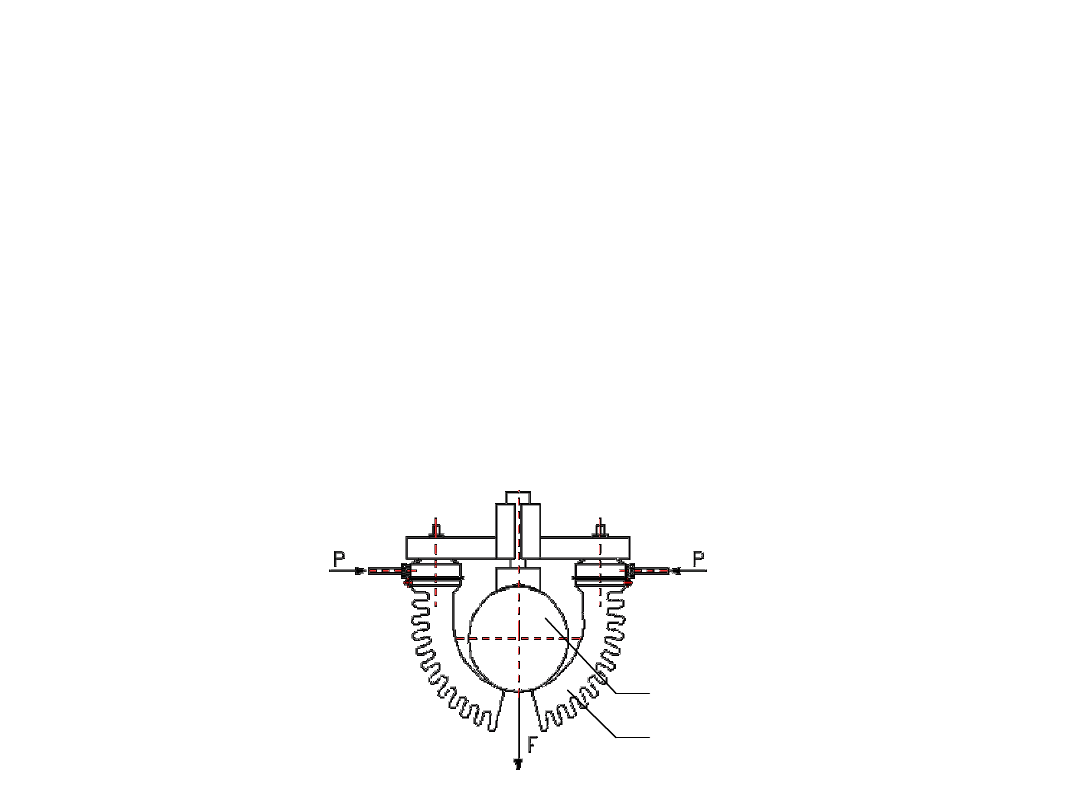
CHWYTAKI Z KOŃCÓWKAMI SZTYWNYMI
Przy wyborze chwytaka z końcówkami sztywnymi, inżynier powinien kierować się:
• zakresem przemieszczeń elementów chwytnych
• wartością siły chwytu
UWAGA:
W chwytakach tego typu elementy
chwytne, bez względu na to czy są twarde
czy miękkie, mogą mieć skłonność do
odrywania się od obiektu już po wstępnym
uchwyceniu, co może niekorzystnie wpływać
na przemieszczenie się obiektu w szczękach.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
25
CHWYTAKI Z KOŃCÓWKAMI SPRĘŻYSTYMI
Chwytaki ze sprężystymi końcówkami miały być „lekarstwem” na niekorzystne
zjawiska towarzyszące chwytaniu przedmiotów za pomocą chwytaków
z końcówkami sztywnymi (m.in. mocne oddziaływanie końcówek na obiekt w
momencie chwytania).
Budowa:
wykonane najczęściej ze stalowych płaskowników zwartych w stanie
spoczynku chwytaka. Siła uchwytu zależy od sztywności elementów
sprężystych
Zastosowanie:
manipulowanie małymi obiektami często w małej, ograniczonej przestrzeni.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
26
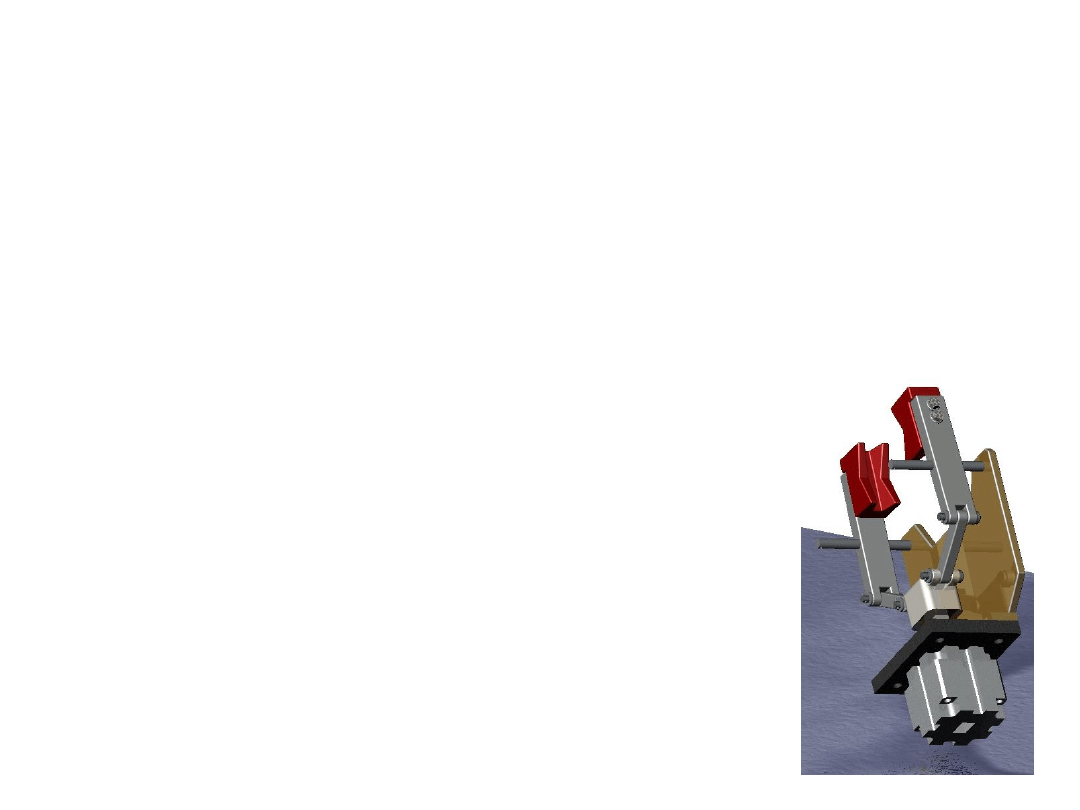
CHWYTAKI Z KOŃCÓWKAMI ELASTYCZNYMI
Chwytaki z elastycznymi końcówkami mają zdolność zmiany swojego
kształtu (najczęściej pod wpływem dostarczonej energii) po to, aby
jednoznacznie, pewnie i delikatnie uchwycić obiekt manipulacji.
Do cech chwytaków z elastycznymi końcówkami można zaliczyć:
• zmienny rozmiar szczęk chwytających
• zmienne siły chwytania
• adaptacja powierzchni chwytających
• duża elastyczność osiągania różnych pozycji i orientacji.
1
2

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
27
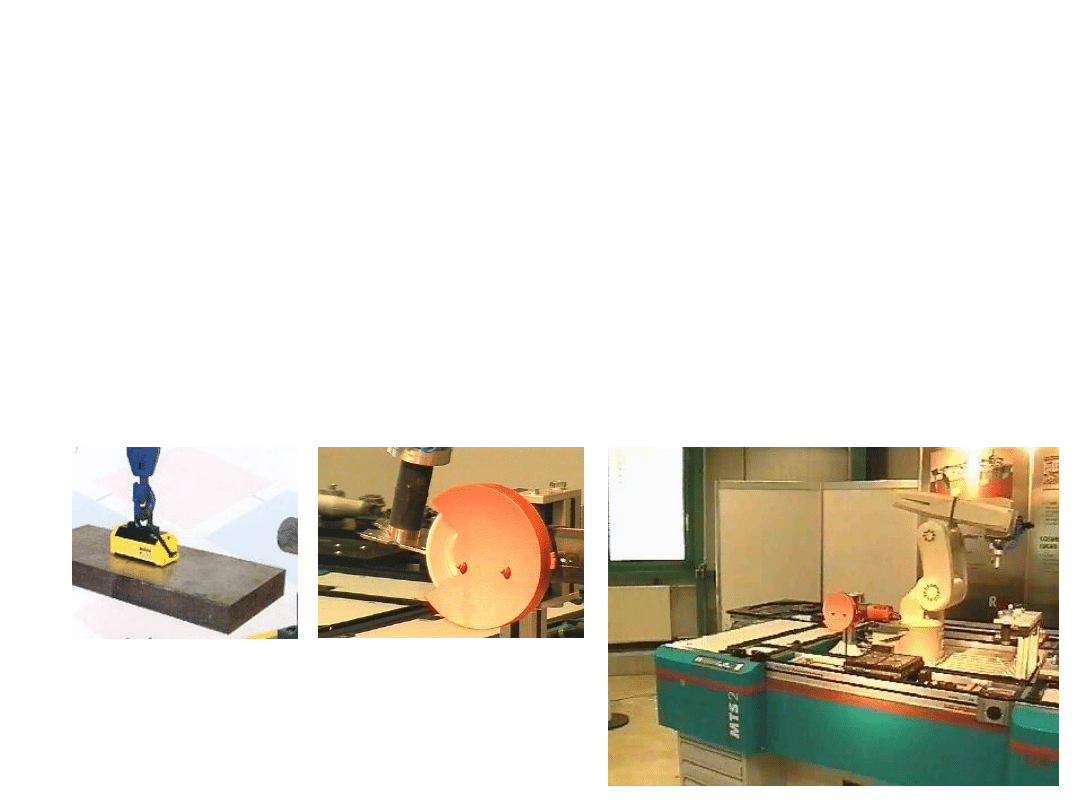
CHWYTAKI PODCIŚNIENIOWE
Chwytaki podciśnieniowe mają szerokie zastosowanie m.in. w:
• transporcie blach
• transporcie materiałów malarskich
• transporcie szyb
• transporcie elementów samochodowych.
Nadają się idealne do chwytania gładkich powierzchni.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
28
CHWYTAKI PODCIŚNIENIOWE
Zwiększenie udźwigu można uzyskać poprzez:
• zwiększenie wartości podciśnienia (stosuje się rzadko)
• zwiększenie powierzchni przyssawki (realizowane najczęściej poprzez
tworzenie zespołów wielu przyssawek).
Rozwiązanie takie nie tylko umożliwia
manipulowanie
cięższymi
i
większymi
obiektami, ale również podnosi pewność
chwytu (np. w przypadku, kiedy jedna
z przyssawek nie zadziała poprawnie).
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
29
CHWYTAKI PODCIŚNIENIOWE
W zależności od umiejscowienia układu sterowania zespołem przyssawek można
wyróżnić układy:
• scentralizowane
• częściowo zdecentralizowane
• w pełni zdecentralizowane.
Układ scentralizowany to zespół, w którym pompa i układ sterowania
usytuowane są centralnie.
Układ częściowo zdecentralizowany to zespół, w którym układ
sterowania usytuowany jest centralnie, natomiast pompa próżniowa znajduje
się blisko punktu ssania.
Układ w pełni zdecentralizowany to taki, w którym przy każdej
przyssawce zlokalizowana jest pompa.
a)
b)
c)
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
30
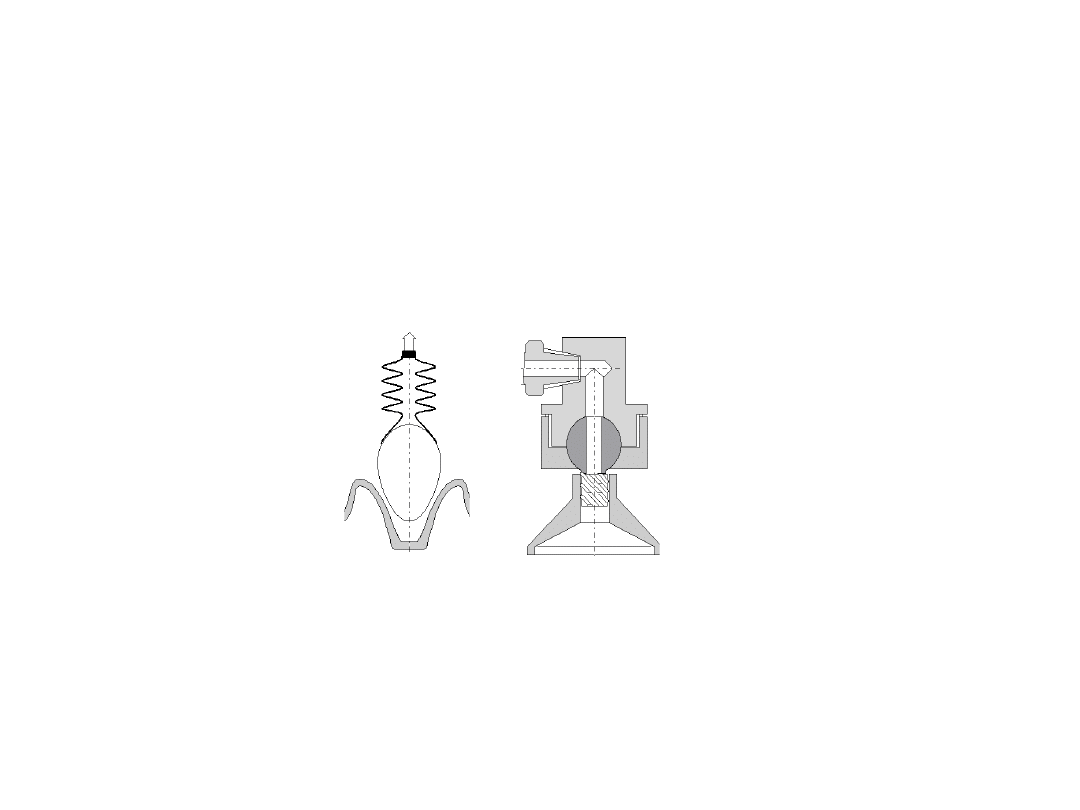
CHWYTAKI PODCIŚNIENIOWE
Chwytaki podciśnieniowe można podzielić ze względu na typy przyssawek:
• wykorzystujące naturalne podciśnienie (rys.a);
• wykorzystujące pompę tworzącą podciśnienie (rys.b).
a)
b)

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
31
CHWYTAKI PODCIŚNIENIOWE
Zastosowanie chwytaków podciśnieniowych ograniczone jest następującymi
warunkami:
• konieczna jest szczelność przyssawki podczas manipulowania
• czas uchwycenia jest dłuższy niż w przypadku innych chwytaków ze względu na
określone pojemności urządzenia oraz konieczność wytworzenia określonej
wartości podciśnienia
• powierzchnia obiektów płaska lub kulista o dużej gładkości
• mała trwałość przyssawki gumowej
• ograniczona temperatura stosowania (do 400°C )
• przyssawki z poliuretanu dla temp. nawet do 1200°C
• między przyssawką a obiektem powinna powstać siła tarcia statycznego
• dla zapewnienia zwolnienia obiektu należy wprowadzić dodatkowy krótkotrwały
impuls ciśnieniowy
• chwytaki są przyczyną hałasu powstającego w wyniku rozprężenia gazu, przez
zastosowanie tłumików możliwe jest zredukowanie hałasu do kilkunastu dB.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
32
CHWYTAKI MAGNETYCZNE
W chwytakach magnetycznych, w celu wytworzenia pola sił działającego na
ferromagnetyczny obiekt manipulacji stosuje się:
• magnesy trwałe
• elektromagnesy
• układy mieszane
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
33
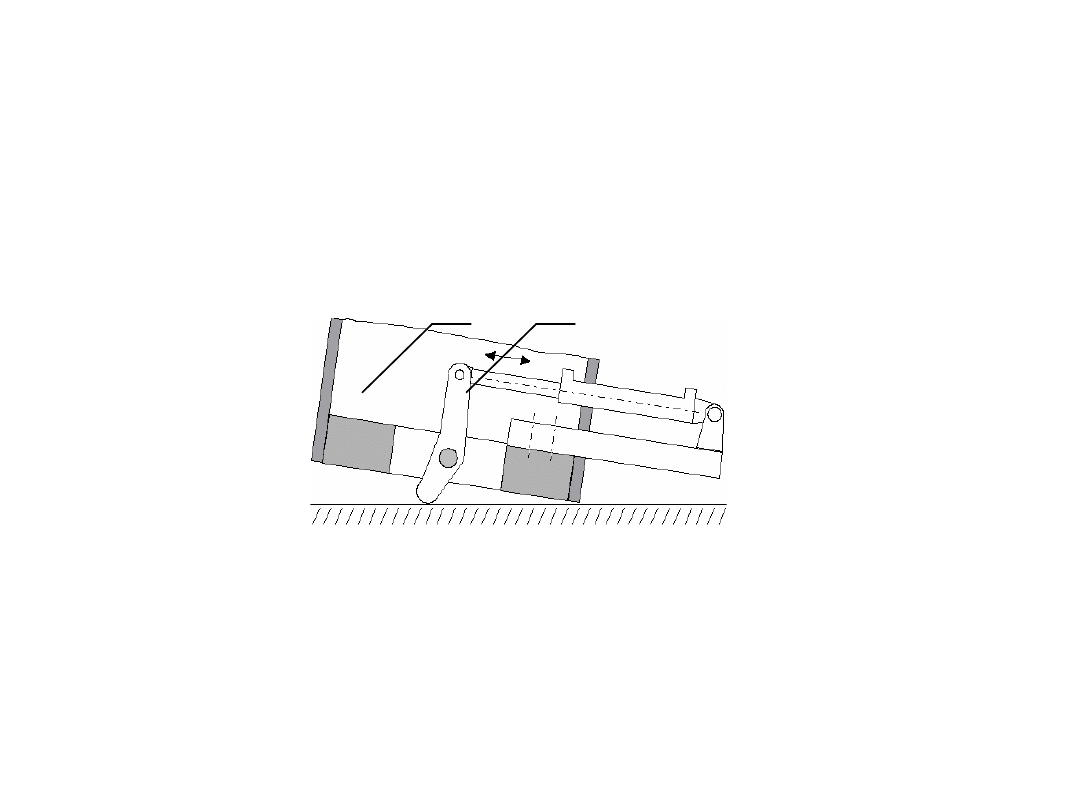
CHWYTAKI MAGNETYCZNE
W chwytaku z magnesem trwałym obiekt trzymany jest dzięki działaniu sił
pola magnetycznego, a jego uwolnienie dokonywane jest mechanicznie np. za
pomocą dodatkowego siłownika.
1
2
Chwytak magnetyczny z dźwignią umożliwiającą odrzucenie
detalu chwytanego
1-chwytak, 2-dźwignia
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
34
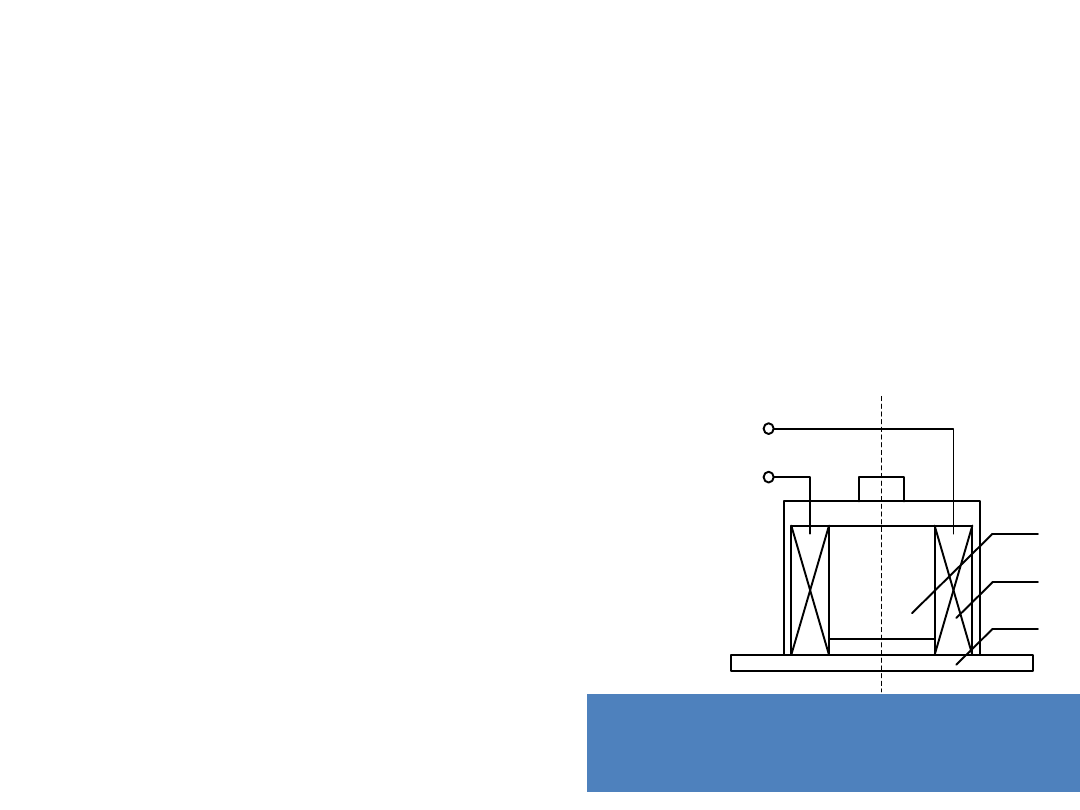
CHWYTAKI MAGNETYCZNE
W chwytakach z elektromagnesem obiekt trzymany jest w czasie
przepływu prądu przez uzwojenie.
Napięcie
zasilające
1
2
3
Chwytak elektromagnetyczny
1-rdzeń elektromagnesu, 2-uzwojenie
elektromagnesu, 3-obiekt manipulacji
W
chwytakach
z
magnesem
stałym
i
elektromagnesem obiekt jest trzymany przez
magnes, a siła chwytu zwiększana jest dodatkowo
podczas manipulowania obiektem przez włączenie
prądu w uzwojeniu elektromagnesu.
Uwolnienie obiektu następuje w tych przypadkach
przez zmianę biegunowości elektromagnesu, czasem
dodatkowo wspomagane dźwignią.

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
35
CHWYTAKI MAGNETYCZNE
• możliwością chwytania obiektów ferromagnetycznych
• gwałtownymi przemieszczeniami obiektu manipulacji przy zbliżeniu się
chwytaka (powoduje to utratę dokładności położenia początkowego
obiektu)
• występowaniem magnetyzmu szczątkowego, który powoduje m.in.
przyciąganie drobin metalowych oraz utrudnia uwolnienie obiektu
• zmniejszenie się siły chwytu na skutek zabrudzenia miejsca uchwycenia
np. opiłkami
• wydzielaniem się ciepła w uzwojeniu elektromagnesu.
Ze względu na zmianę właściwości ferromagnetycznych
maksymalna
temperatura
pracy
chwytaków
elektromagnetycznych wynosi ok. 600
o
C.
Niedogodności stosowania chwytaków magnetycznych związane są z:
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
36
CHWYTAKI Z SYSTEMEM CZUJNIKÓW
Obecnie coraz częściej można spotkać chwytaki wyposażone w dodatkowe
czujniki (odległości, momentów, siły, itp.). Przewiduje się, iż w przyszłości
chwytaki robotów będą mogły konkurować z ludzkimi rękami.
Czujnik
odległości
Pomiar siły
i momentów
Czujnik orientacji
Czujnik
zbiżeniowy
Czujnik
pozycji
Czujnik
dotykowy
Końcówki chwytne
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
37
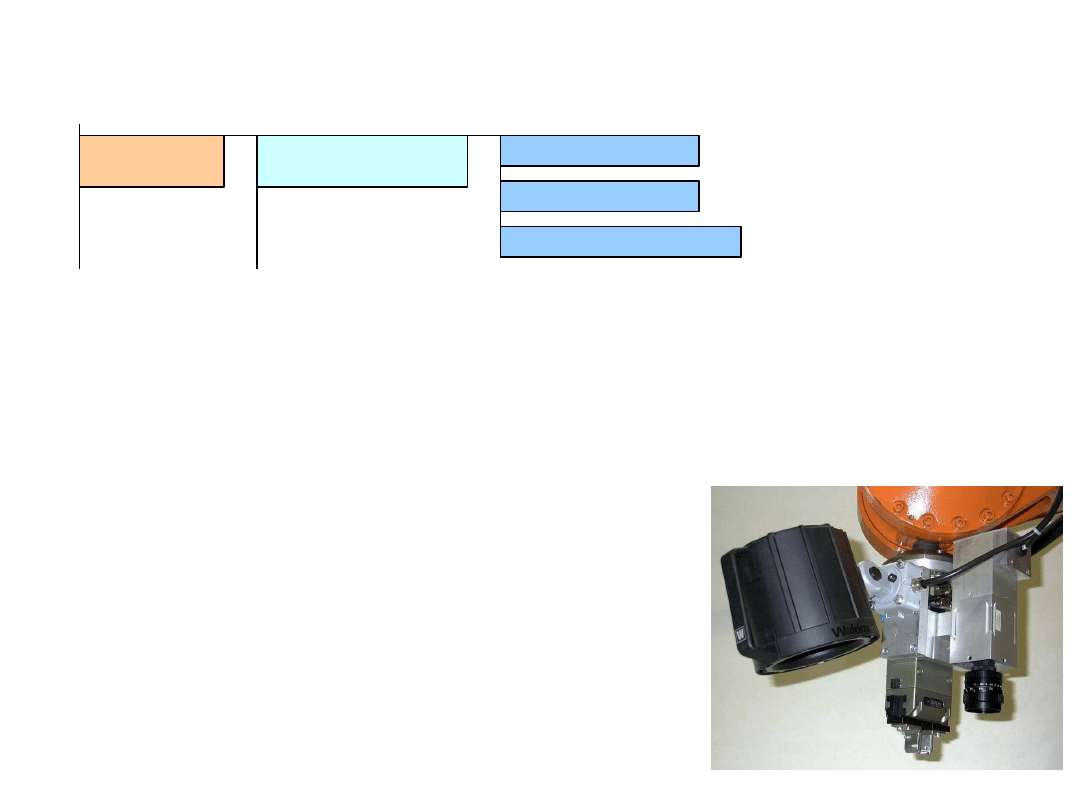
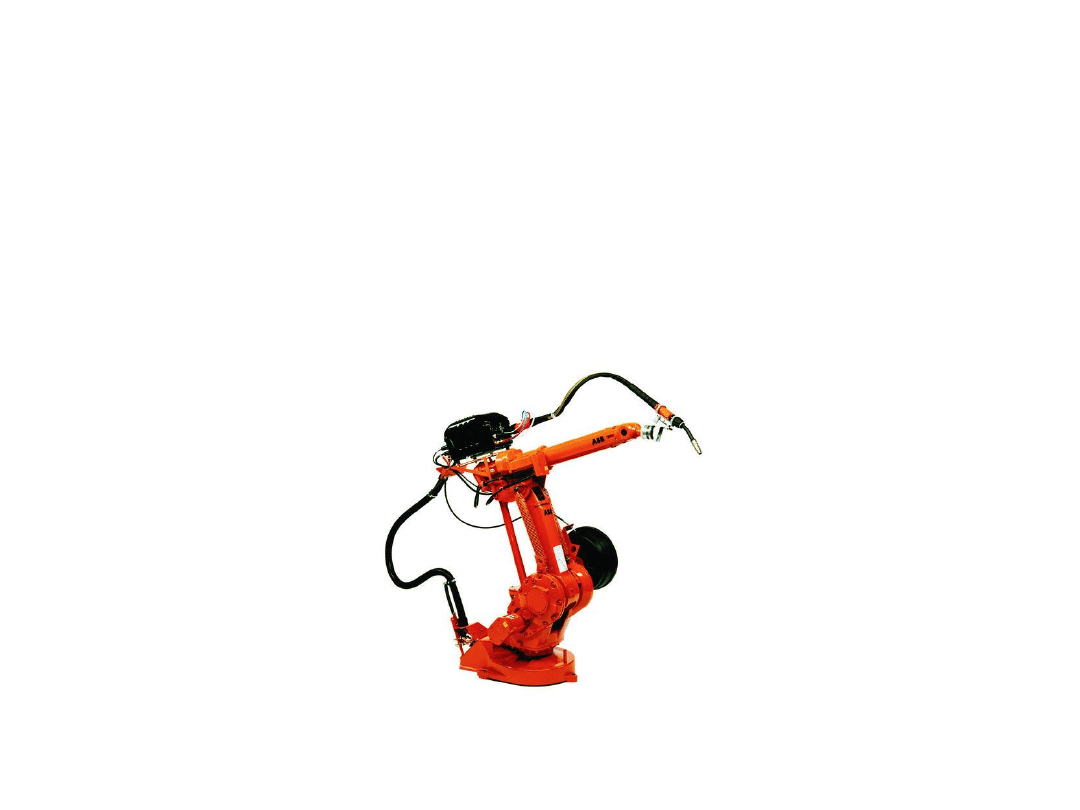
NARZĘDZIA ROBOTÓW
W zastosowaniach przemysłowych bardzo często dochodzi do sytuacji,
kiedy robot zamiast w chwytak, zostaje wyposażony w specjalistyczne
narzędzie. Narzędzie takie jest mocowane w tym samym miejscu, co chwytak
(kołnierz robota).
Robot firmy ABB wyposażony w narzędzie do spawania łukowego

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
38
NARZĘDZIA ROBOTÓW
W zależności od wykonywanych zadań mogą to być:
• narzędzia spawania punktowego (zgrzewadło)
• narzędzia spawania łukowego (pistolet)
• pochodnie spawalnicze lub do cięcia (lanca)
• narzędzia do cięcia wodą
• lasery
• pistolety do malowania
• narzędzia do wiercenia, mielenia, kruszenia, malowania
• wkręcania/wykręcania śrub
• inne

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
39
NARZĘDZIA ROBOTÓW
Narzędzia robotów są urządzeniami wykorzystywanymi do pracy ręcznej, a
przystosowanie ich do pracy w zautomatyzowanych komórkach roboczych
polega zazwyczaj na zaopatrzeniu ich w:
• układ sprzęgający, umożliwiający ich odpowiednie zamocowanie na
nosicielu (np. robocie)
• układ automatycznego sterowania napędem, dostarczania materiałów
roboczych (np. automatycznego podawania elektrody drutowej przy
spawaniu łukowym) i podawania płynów (np. chłodziwa)
• elementy dodatkowe (np. odciążniki).

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
40
SYSTEMY WYMIANY NARZĘDZI
Na nowoczesnych liniach technologicznych fabryk dość często można
spotkać roboty wyposażone w systemy wymiany narządzi:
•
zwiększenie elastyczności robotów
•
dobre wyniki ekonomiczne.
Najprostszym rozwiązaniem jest wyposażenie robota w uniwersalny
kołnierz, do którego można dołączać różne typy efektorów.
Sposób wymiany narzędzi musi umożliwić w pełni automatyczną
pracę, czyli musi prowadzić do:
• automatycznego zwolnienia (odłożenia) „starego” efektora
• automatycznego uchwycenia „nowego” efektora
• automatycznego zablokowania „nowego” efektora w kołnierzu
robota
• automatycznego podłączenia linii zasilających i kontrolnych do
efektora.

WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
41
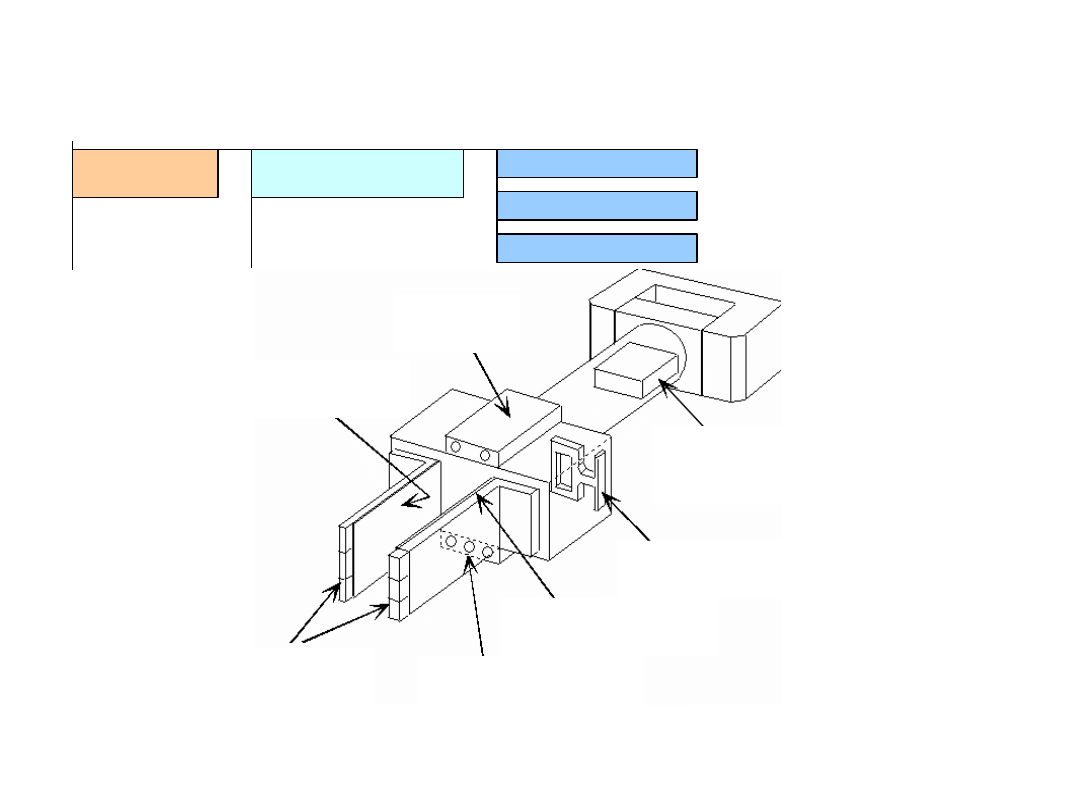
SYSTEMY WYMIANY NARZĘDZI
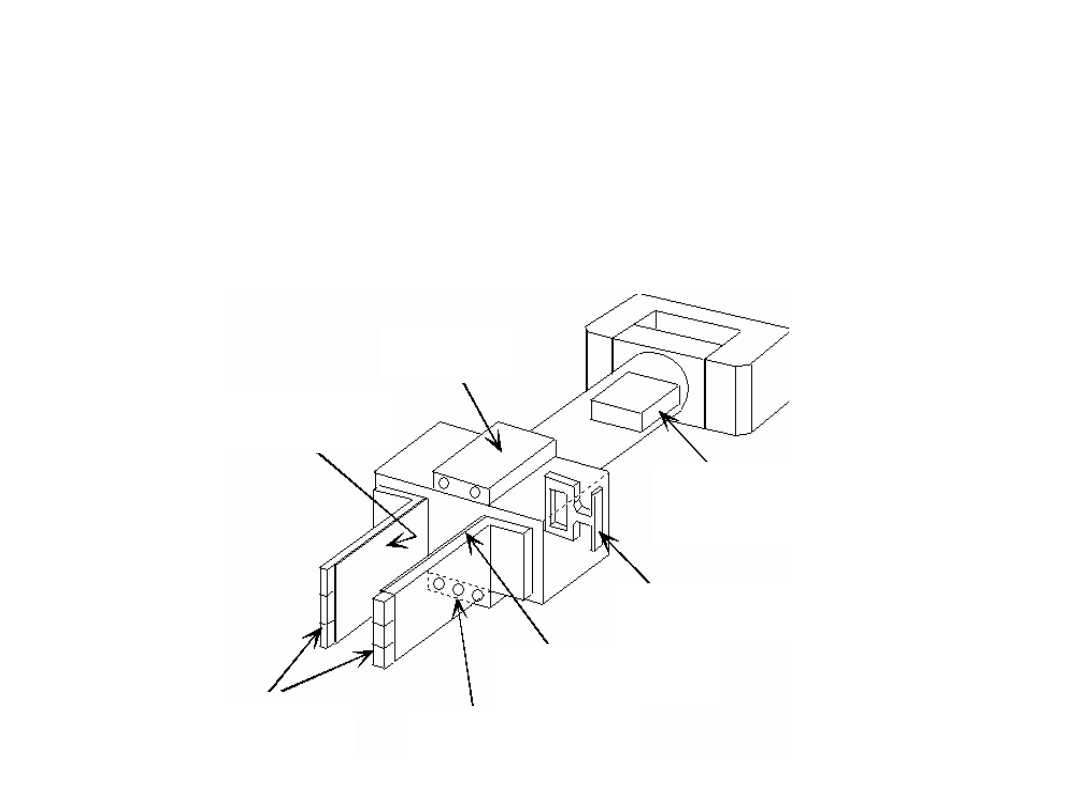
Bardzo ważnymi zagadnieniami są tutaj:
•
szybka i bezkolizyjna dostępność do magazynu narzędziowego
•
blokowanie narzędzia w kołnierzu manipulatora.
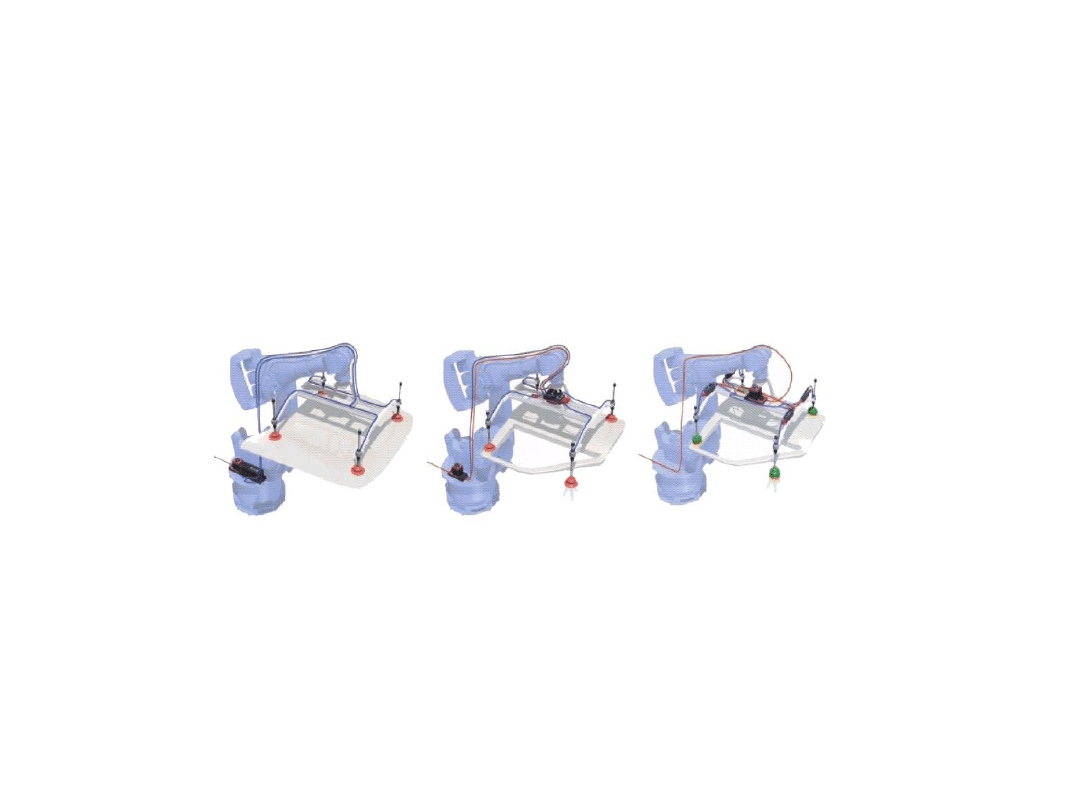
Blokowanie narzędzia może być zrealizowane za pomocą
pneumatycznej zasuwy.
Rozwiązanie to polega na zamykaniu pneumatycznego
zaworu,
który
poprzez
zasuwę
wpływa
na
zablokowanie/odblokowanie
efektora.
Jeśli
zawór
pneumatyczny jest otwarty zasuwa pneumatyczna jest
zwolniona, natomiast jeśli zawór pneumatyczny jest zamknięty,
wówczas zasuwa ciasno mocuje efektor w kołnierzu chwytaka.
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
42
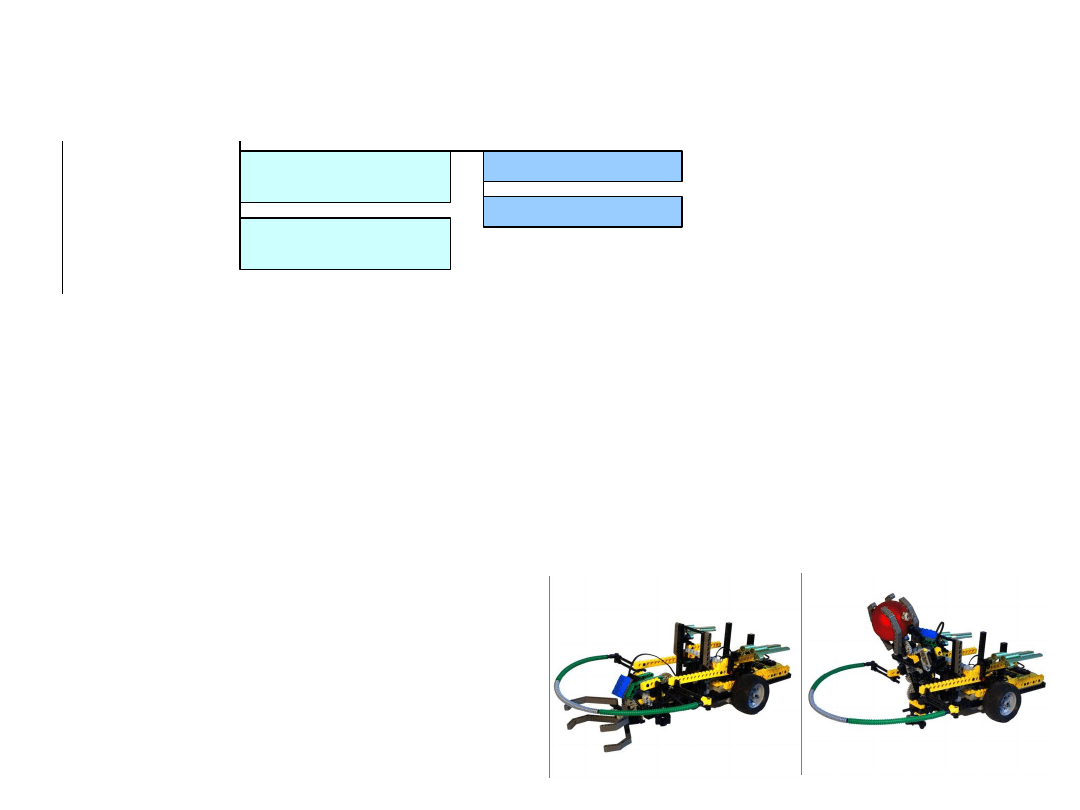
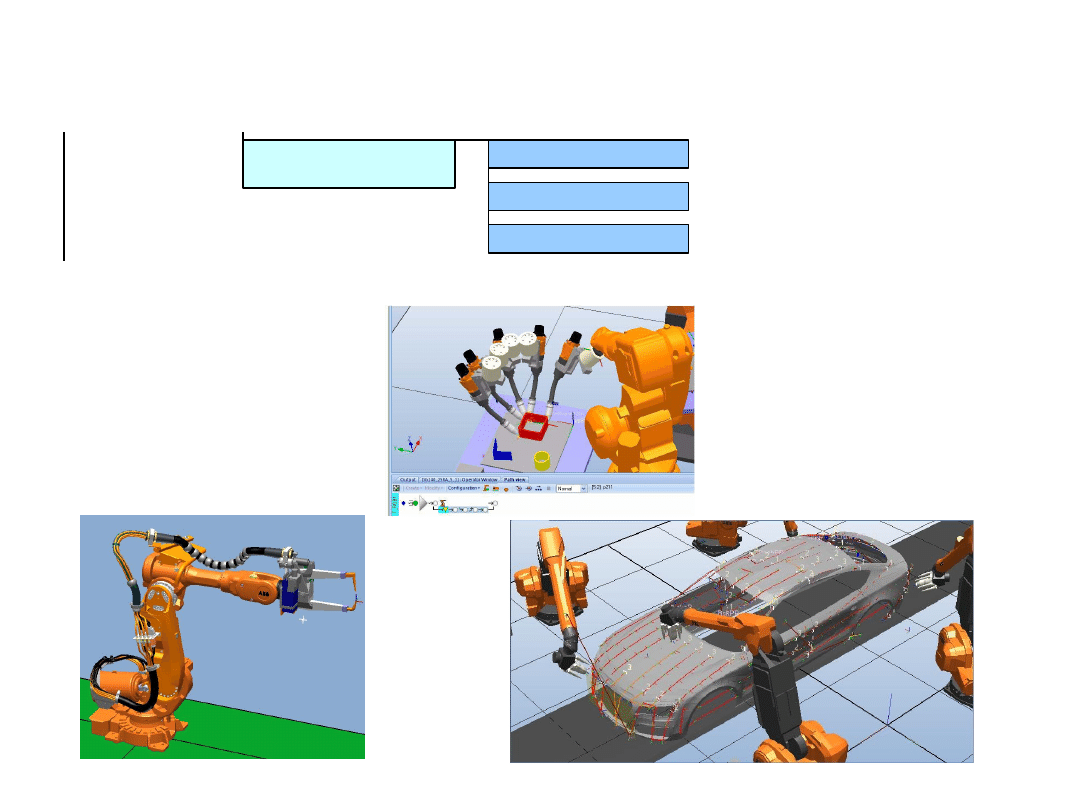
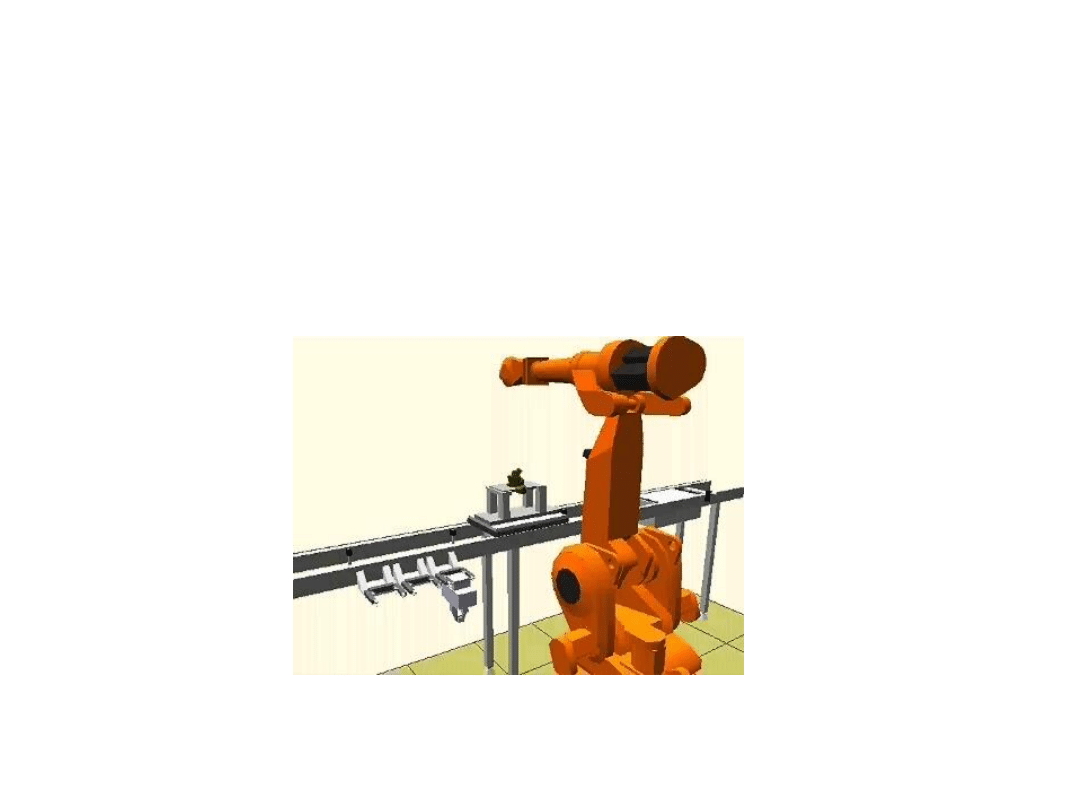
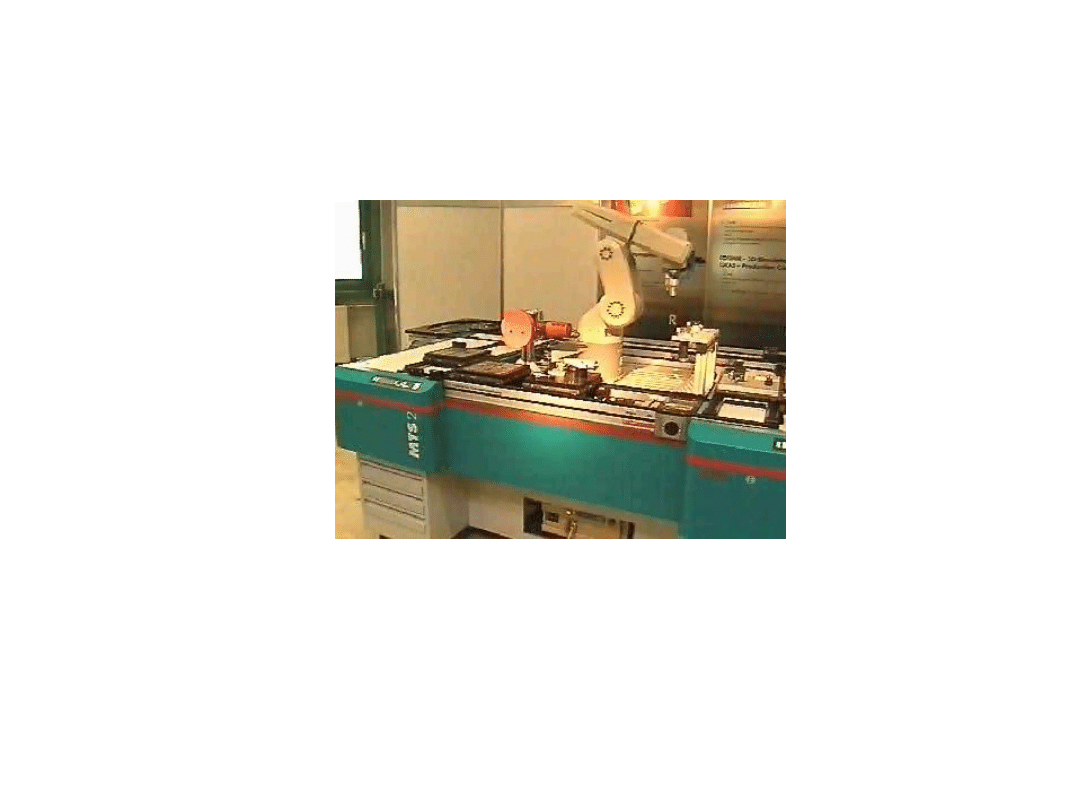
SYSTEMY WYMIANY NARZĘDZI
Typowym zadaniem, w którym wykorzystywany jest system wymiany
efektorów jest montaż, ponieważ w tym przypadku, roboty wykonują
najczęściej kilka czynności technologicznych przy jednym obiekcie
WYDZIAŁ MECHATRONIKI I LOTNICTWA
KATEDRA MECHATRONIKI
43
SYSTEMY WYMIANY NARZĘDZI
Wyszukiwarka
Podobne podstrony:
2013 10 23 Par wyklad 3id 28292 Nieznany
2013 10 23 Par wyklad 1i2
Napęd Elektryczny wykład
wykład5
Psychologia wykład 1 Stres i radzenie sobie z nim zjazd B
Wykład 04
geriatria p pokarmowy wyklad materialy
ostre stany w alergologii wyklad 2003
WYKŁAD VII
Wykład 1, WPŁYW ŻYWIENIA NA ZDROWIE W RÓŻNYCH ETAPACH ŻYCIA CZŁOWIEKA
Zaburzenia nerwicowe wyklad
Szkol Wykład do Or
Strategie marketingowe prezentacje wykład
Wykład 6 2009 Użytkowanie obiektu
wyklad2
wykład 3
więcej podobnych podstron