02 Statyka
10
S T A T Y K A
ZASADY (AKSJOMATY
1
) STATYKI
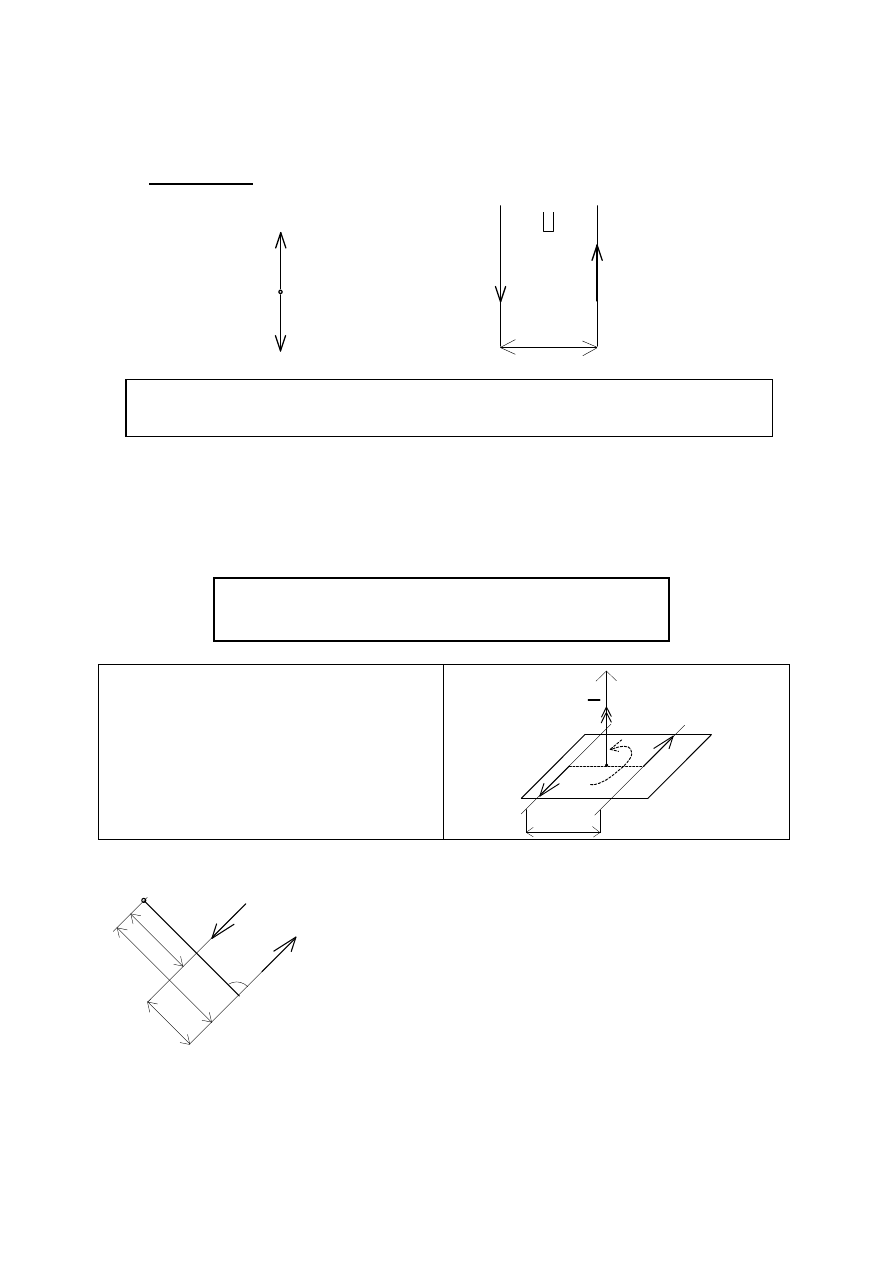
Zasada 1
Dwie siły przyłożone do ciała sztywnego równoważą się tyl-
ko wtedy, gdy działają wzdłuż jednej prostej, są przeciwnie
skierowane i mają te same wartości liczbowe.
Zasada 2
*
Działanie układu sił przyłożonych do ciała sztywnego nie
ulegnie zmianie, gdy do tego układu zostanie dodany lub
odjęty dowolny układ równoważących się sił (tzw. układ ze-
rowy).
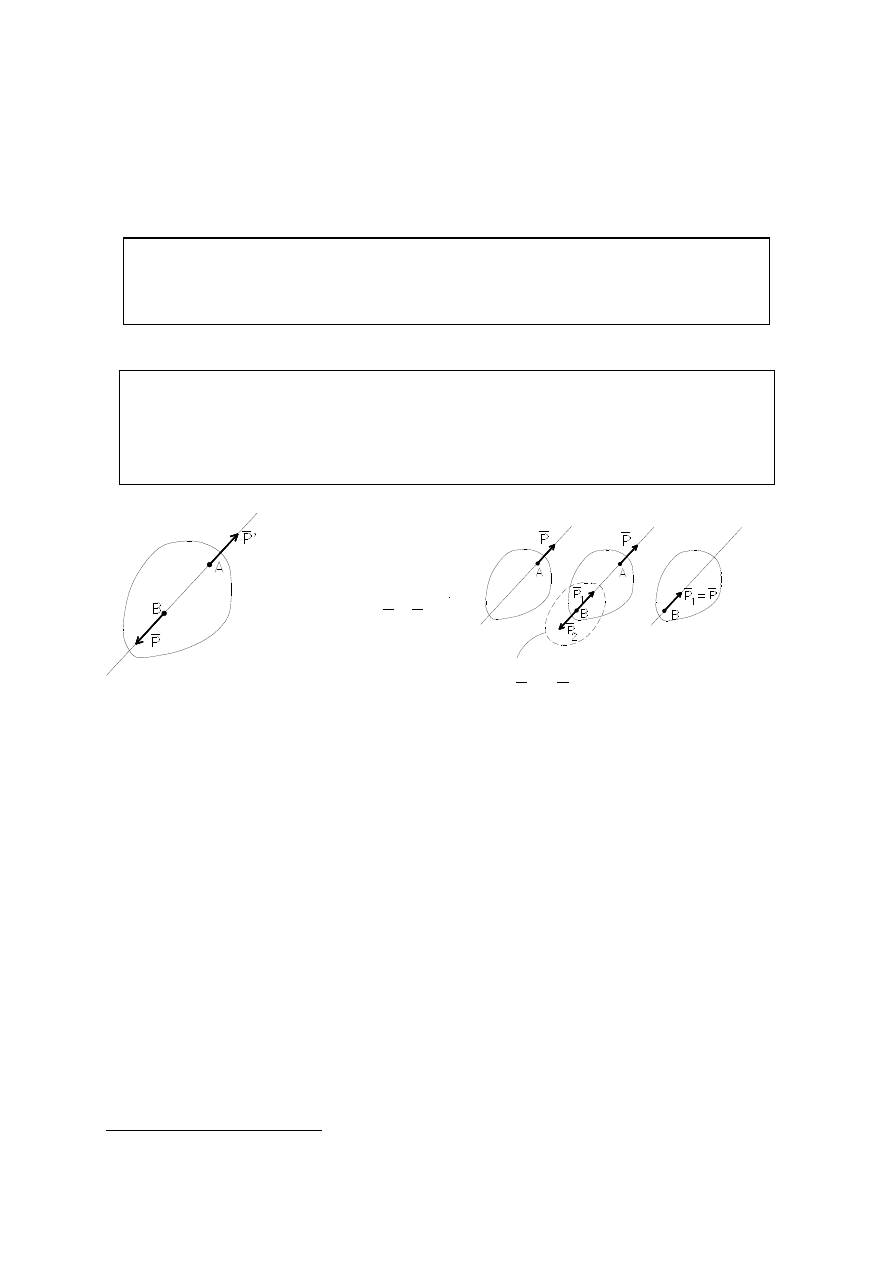
Interpretacja pierwszej
zasady statyki
Interpretacja drugiej
zasady statyki
Do ciała sztywnego zawsze można przyłożyć dwie równe
co do wartości liczbowej i przeciwnie skierowane siły, działające
wzdłuż tego samego kierunku. Zerowe układy sił wykorzysty-
wane są do identyfikacji sił działających na elementy konstruk-
cyjne.
Z zasady 2
wypływa ważny praktyczny wniosek, że każdą
siłę działającą na ciało sztywne można dowolnie przesuwać
wzdłuż kierunku jej działania. Wektor, który może być dowol-
nie przesuwany wzdłuż kierunku działania, nazywa się wekto-
rem przesuwnym.
Siła działająca na ciało sztywne jest wekto-
rem swobodnym.
1
Aksjomat
– twierdzenie przyjmowane bez dowodu, pewnik.
Równowaga sił:
wektorowo:
'
P
P
Zerowy układ sił:
2
1
P
P
02 Statyka
11
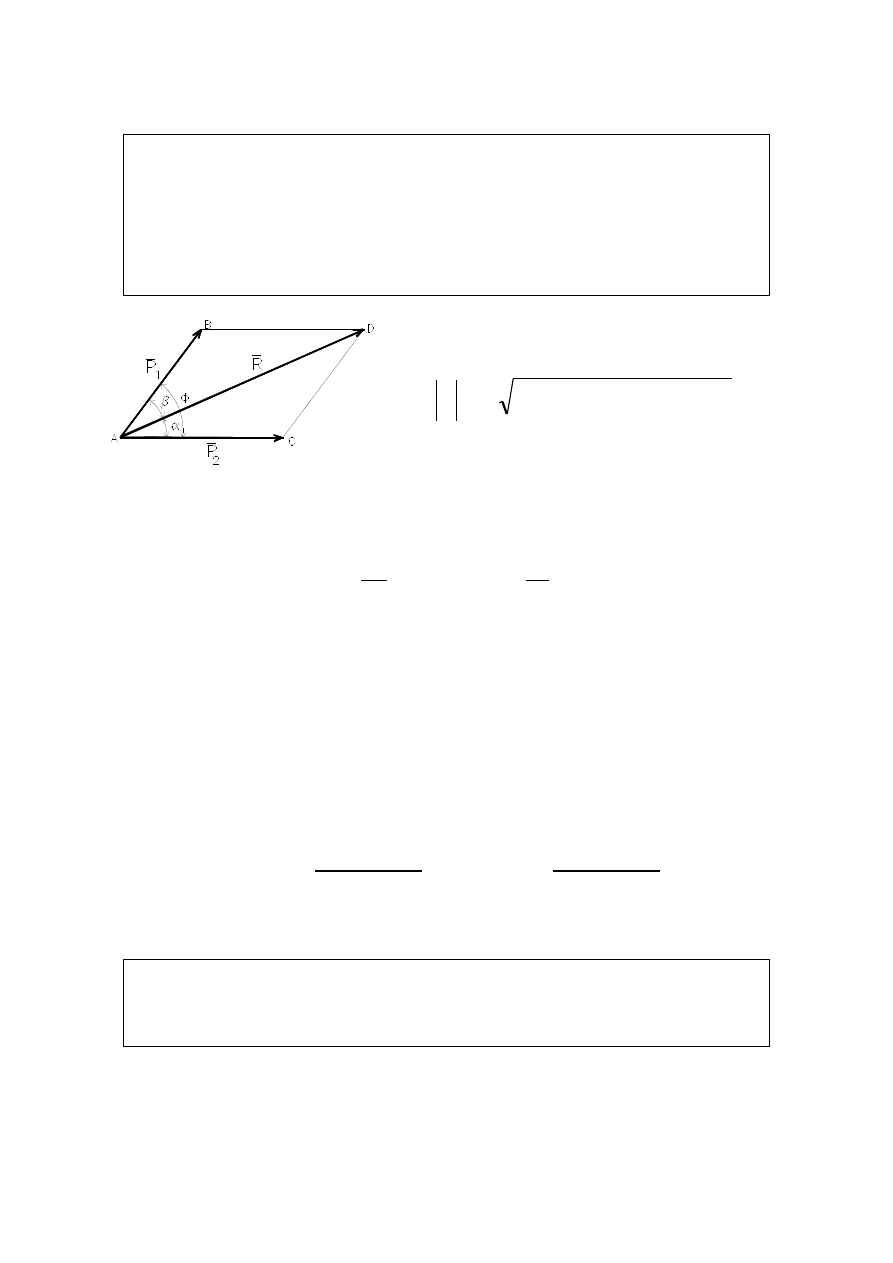
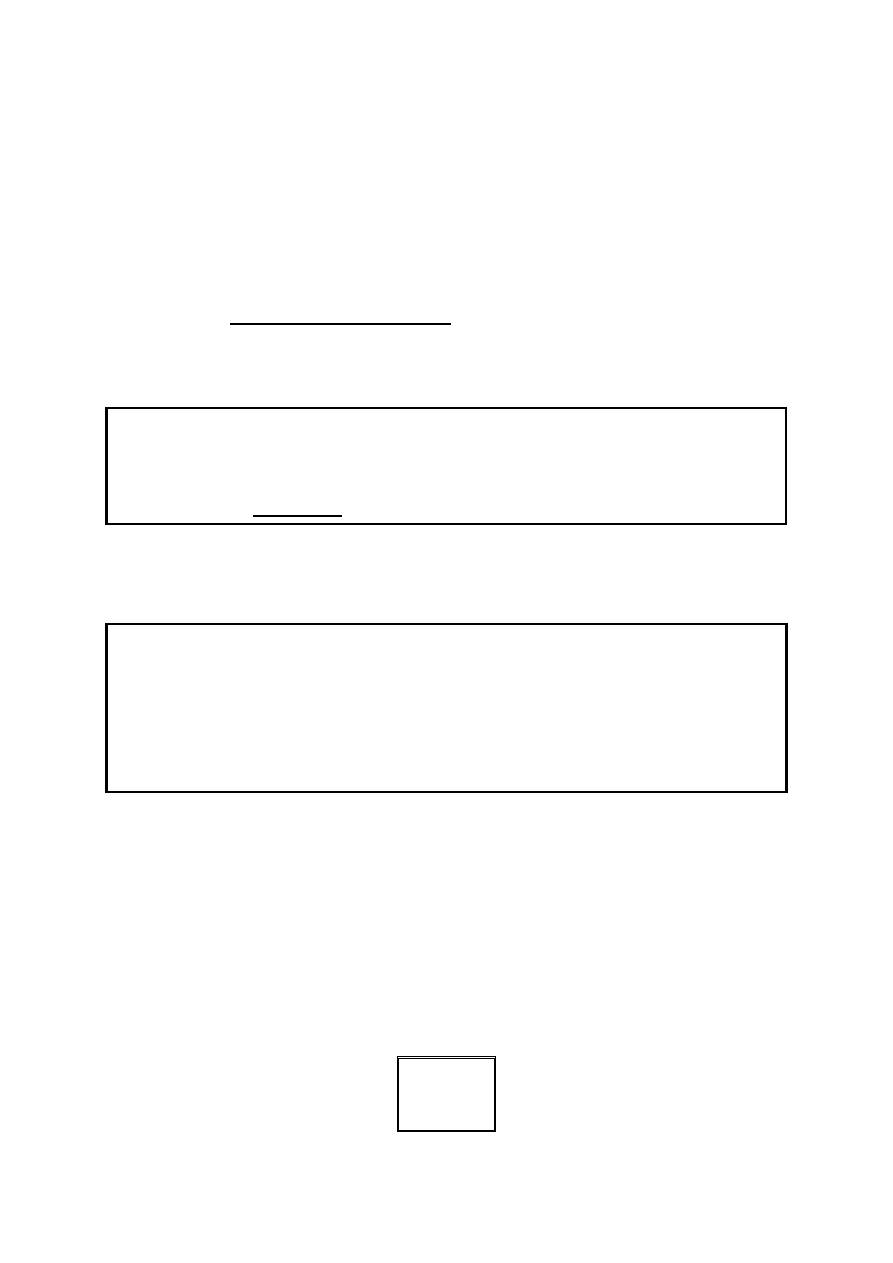
Zasada 3 (zasada równoległoboku)
Dowolne dwie siły
2
1
P
i
P
, przyłożone do jednego punktu,
można zastąpić siłą wypadkową
R
przyłożoną do tego
punktu i przedstawioną jako wektor będący przekątną rów-
noległoboku ABCD zbudowanego na wektorach sił w spo-
sób pokazany na rysunku.
Moduł wypadkowej R można obli-
czyć z zależności:
cos
P
P
2
P
P
R
R
2
2
2
1
2
2
2
1
,
gdzie
– kąt między siłami P
1
i P
2
.
Po zastosowaniu do trójkątów ABD i
ACD twierdzenia sinu
sów otrzymuje
się:
.
sin
R
P
sin
,
sin
R
P
sin
1
2
Wyznaczanie wypadkowej R, gdy są znane P
1
i P
2
oraz kąt
,
jest nazywane zadaniem prostym.
Zasada równoległoboku
pozwala również rozwiązać zadanie odwrotne: rozłożyć daną
siłę P na dwie składowe o znanych kierunkach działania, prze-
cinających się w punkcie przyłożenia siły P i leżących z nią w
jednej płaszczyźnie. Dla znanych P,
i
korzysta się wówczas
ze wzo
rów:
.
sin
sin
P
P
,
sin
sin
P
P
2
1
Zasada 4 (działania i przeciwdziałania)
Każdemu działaniu towarzyszy równe co do wartości i prze-
ciwnie skierowane wzdłuż tej samej prostej przeciwdziała-
nie.
Zasada 4 odpowiada trzeciemu prawu Newtona,
sformułowa-
nemu nie dla punktu materialnego, ale dla dowolnego ciała ma-
terialnego.
Zasada równoległoboku
02 Statyka
12
Zasada 5 (zasada zesztywnienia)
*
Równowaga sił działających na ciało odkształcalne nie zo-
stanie naruszona przez ze
sztywnienie tego ciała.
Na podstawie tej zasady przyjmuje s
ię, że układ sił działa-
jących na ciało odkształcalne będące w równowadze spełnia
te same warunki równowagi, które dotyczą działania układu sił
na ciało sztywne. Zasada zesztywnienia ma więc ogromne zna-
czenie praktyczne w wytrzymałości materiałów, traktowanej ja-
ko mechanika ciała odkształcalnego.
Zasada 6 (zasada oswobodzenia od więzów)
*
Każde ciało nieswobodne można myślowo oswobodzić od
więzów, zastępując przy tym ich działanie odpowiednimi re-
akcjami. Dalej ciało to można rozpatrywać jako ciało swo-
bodne,
podlegające działaniu sił czynnych (obciążeń) oraz
sił biernych (reakcji).
UWAGA: zasady nr 2, 5 i 6 (oznaczone
*
) zostały wyróż-
nione ze względu na ich znaczenie w wytrzymałości materiałów
(mechanice ciała odkształcalnego).
02 Statyka
13
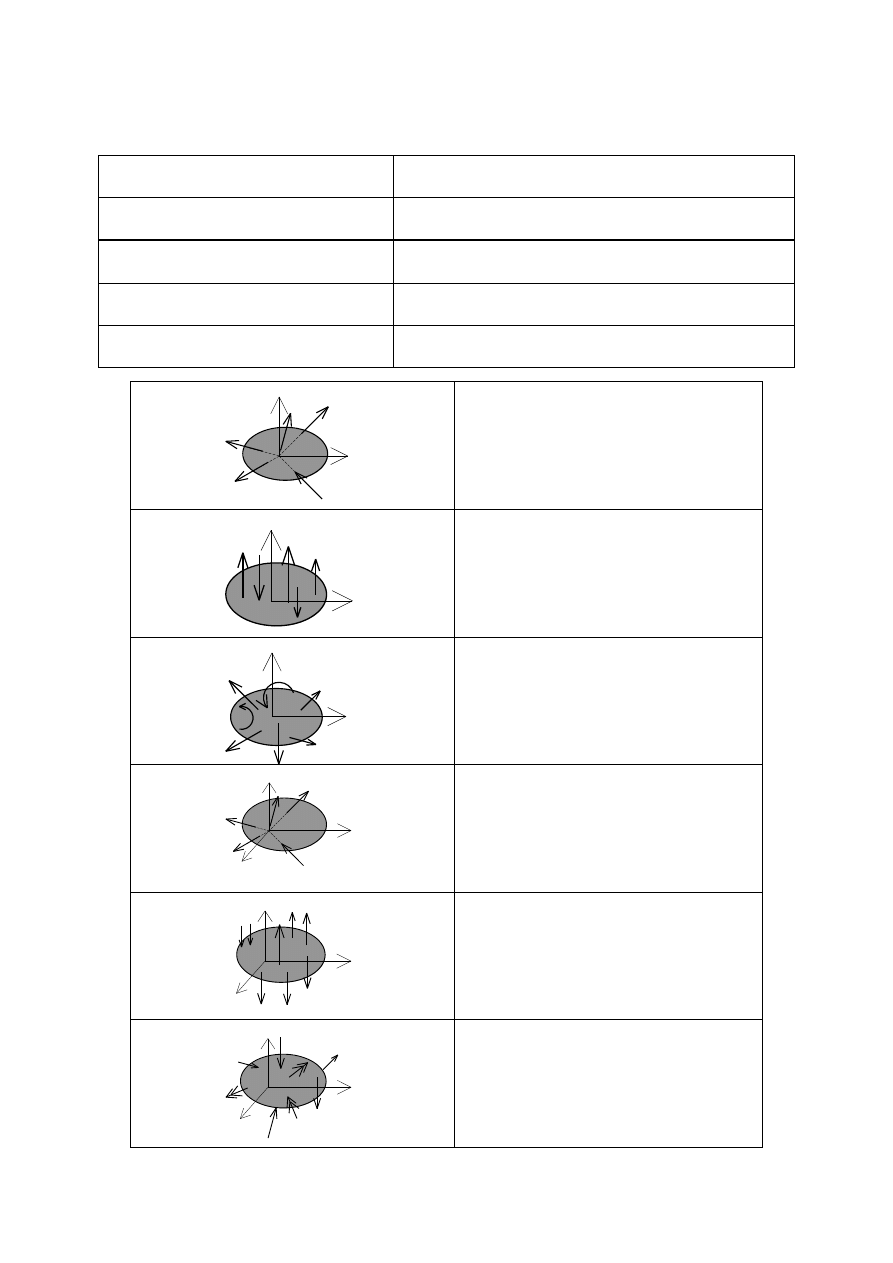
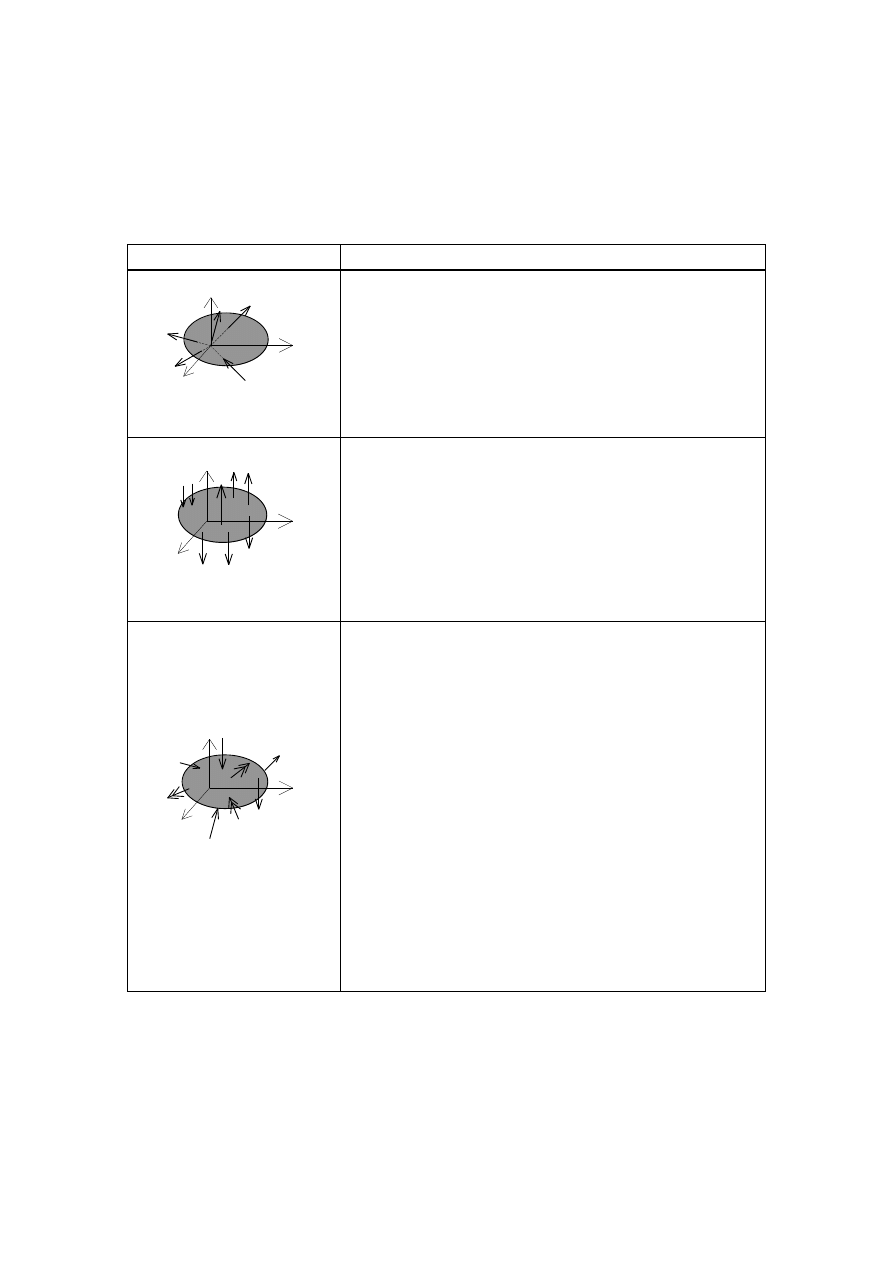
UKŁADY SIŁ W STATYCE
Płaskie układy sił
Wszystkie siły układu działającego na ciało
sztywne leżą w jednej płaszczyźnie.
Przestrzenne układy sił
Siły układu działające na ciało sztywne
mają dowolne kierunki w przestrzeni.
Zbieżne układy sił
Linie działania wszystkich sił przecinają się
w jednym punkcie.
Równoległe układy sił
Linie działania wszystkich sił są do siebie
równoległe.
Dowolne układy sił
Linie działania wszystkich sił mają dowolne
kie
runki działania
X
Y
Płaski układ sił zbieżnych
X
Y
Płaski układ sił równoległych
Y
X
Płaski
układ sił dowolnie
skierowanych (dowolnych)
Z
X
Y
Przestrzenny
układ sił zbieżnych
Z
X
Y
Przestrzenny
układ sił równoległych
Z
X
Y
Przestrzenny
układ sił dowolnie skierowa-
nych (dowolnych)
02 Statyka
14
PŁASKIE ZBIEŻNE UKŁADY SIŁ
W płaskim układzie sił zbieżnych kierunki działania sił
przy
łożonych do ciała sztywnego
leżą w jednej płaszczyźnie
i przecinają się w jednym punkcie.
Wypadkową układu sił zbieżnych nazywa się jedną siłę (wektor)
za
stępującą działanie danego układu sił.
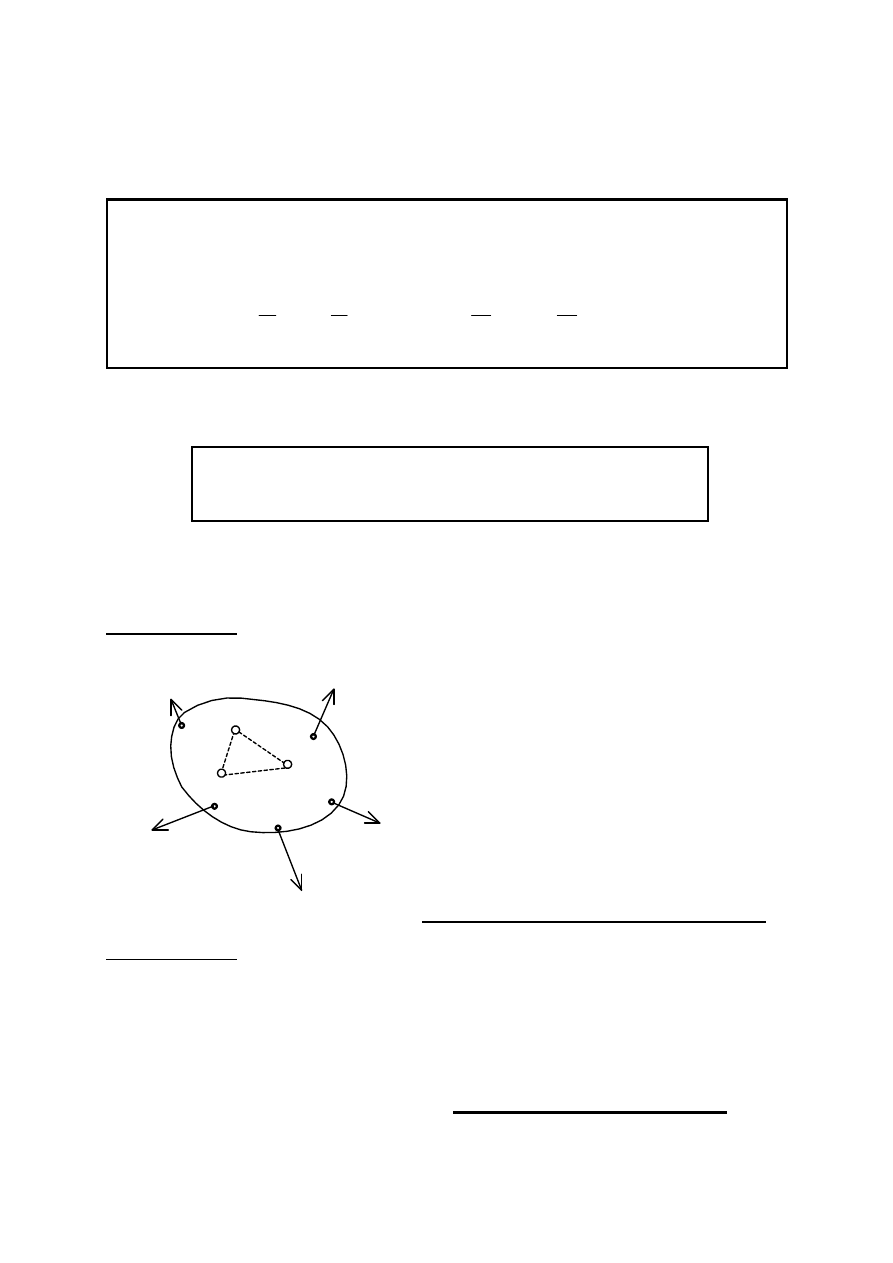
Dowolny płaski układ n sił
n
2
1
P
....,
,
P
,
P
przyłożonych
do punktu O ciała sztywnego można zastąpić
siłą wypadkową
R
równą sumie wektorowej
(geometrycznej) tych sił i przyłożoną również do punktu O.
n
i
1
i
i
2
2
1
P
P
...
P
P
R
.
1
P
3
P
4
P
P
2
O
Układ sił działających na ciało sztywne
1
P
P
2
3
P
4
P
O
Płaski układ sił zbieżnych
R =
12
P
123
P
1234
P
1
P
P
2
3
P
4
P
O
Wypadkowa wyznaczona za pomocą
me
tody równoległoboku
R
1
P
P
2
3
P
4
P
O
Wypadkowa wyznaczona
za po
mocą wieloboku sił
02 Statyka
15
Siły zbieżne
n
2
1
P
....,
,
P
,
P
działające w jednej płaszczyźnie znaj-
dują się w równowadze, gdy wektor
siły wypadkowej R równa się zeru.
0
P
R
n
i
1
i
i
ANALITYCZNE WYZNACZANIE WYPADKOWEJ
X
Y
O
P
X
P
Y
P
Rzuty wektora P na osie X i Y: P
X
= P
cos
, P
Y
= P
sin
P
X
, P
Y
– składowe siły P.
Gdy znane są składowe, wartość siły i jej kierunek
wyzna
cza się z zależności:
2
2
Y
x
P
P
P
,
P
P
sin
,
P
P
cos
Y
X
.
UKŁAD RÓWNAŃ RÓWNOWAGI
DLA PŁASKIEGO UKŁADU SIŁ ZBIEŻNYCH
W ZAPISIE ANALITYCZNYM:
0
P
R
,
0
P
R
n
i
1
i
iY
Y
n
i
1
i
iX
X
02 Statyka
16
PŁASKIE UKŁADY SIŁ RÓWNOLEGŁYCH
PŁASKI UKŁAD SIŁ O TYCH SAMYCH ZWROTACH
(zgodnie skierowanych)
Na ciało sztywne dzia-
łają dwie siły równole-
głe
1
P i .
P
2
Dwie równoległe, zgodnie skierowane siły
1
P i
2
P przyłożo-
ne do punktów A i B ciała sztywnego można zastąpić siłą wy-
padkową W równą sumie tych sił, równoległą do nich
i zgodnie z nimi skierowaną. Linia działania wypadkowej W
dzieli wewnętrznie odcinek AB odwrotnie proporcjonalnie do
wartości liczbowych sił
1
P i
2
P .
W =
1
P +
2
P ,
OA
OB
P
P
2
1
.
PŁASKI UKŁAD SIŁ O PRZECIWNYCH ZWROTACH
(przeciwnie skierowanych)
Dwie równoległe, przeciwnie skie-
rowane siły
1
P i
2
P (
1
P >
2
P ) przyło-
żone do punktów A i B ciała sztyw-
nego można zastąpić siłą wypad-
kową W równą różnicy wartości
liczbowych tych sił, równoległą do nich i skierowaną zgodnie z
siłą o większej wartości liczbowej. Linia działania wypadkowej
W dzieli zewnętrznie odcinek AB odwrotnie proporcjonalnie do
wartości liczbowych sił
1
P i
2
P i leży po stronie większej siły.
W =
1
P -
2
P ,
1
2
P
P
BO
AO
.
A
B
O
P
1
P
2
W =
P
1
-
P
2
02 Statyka
17
MOME
NT SIŁY WZGLĘDEM PUNKTU
0
h
A
P
r
M
0
Moment siły P względem
punktu 0 to wektor, którego
wartość bezwzględna równa
jest iloczynowi wartości licz-
bowej siły P i ramienia tej
siły względem punktu 0.
Wektorowo:
P
r
M
0
Skalarnie:
M
0
= P
h (h
– ramię).
Jednostka momentu: [M
0
] = N
m (niuton razy metr)
Znak momentu:
reguła prawej dłoni:
ANALITYCZNE WYZNACZANIE MOMENTU:
O
A(x, y)
P
h
x
P
y
P
X
Y
x
y
h
P
y
P
x
P
M
x
y
0
Moment siły względem punktu jest równy zeru, gdy:
siła jest równa zeru,
linia działania siły przechodzi przez dany punkt (ramię=0).
02 Statyka
18
PARA SIŁ, MOMENT PARY SIŁ
Założenie: P
1
= P
2
P
1
2
P
P
1
2
P
a
Układ dwóch sił równoległych, skierowanych w przeciwnych
kierunkach, o równych modułach, nazywa się PARĄ SIŁ.
Odległość między siłami – ramię pary sił.
Siły tworzące parę nie mają wypadkowej (P
1
= P
2
),
ale i
nierównoważące się, gdyż nie działają wzdłuż
jednego kierunku
– nie są zerowym układem sił.
Niezrównoważona para sił działając
na ciało sztywne powoduje jego obrót.
MOMENT PARY SIŁ – wektor,
którego wartość bezwzględna
(moduł) równa jest iloczynowi
wartości liczbowej jednej z sił
pary oraz ramienia tej pary:
M = P
a.
0
M
P
P
a
Z
Moment sił tworzących parę względem dowolnego punktu:
P
P
a
0
90
O
h
1
2
h
.
M
a
P
)
h
h
(
P
h
P
h
P
M
M
h
P
M
h
P
M
2
1
2
1
O
O
2
O
1
O
Suma momentów sił tworzących parę względem dowol-
nego punktu płaszczyzny w której leży para sił, równa
jest MOMENTOWI DA
NEJ PARY SIŁ.
Zerowy układ sił
Para sił
02 Statyka
19
RÓWNOWAŻNE UKŁADY SIŁ
Równoważne układy sił to układy, które wywierają
jedna
kowe działania na ciało sztywne.
WYPADKOWA
– siła równoważna układowi sił.
Pary sił o tej samej płaszczyźnie działania
i o
równych momentach są sobie równoważne.
Ponieważ wywierają one na ciało sztywne
jednakowe działanie – można je wzajemnie zastępować.
Parę sił można dowolnie przesuwać w jej płaszczyźnie dzia-
łania, zachowując jedynie niezmieniony moment. Jako
punkt przyłożenia wektora momentu pary sił M można
obrać dowolny punkt rozpatrywanej płaszczyzny.
MOMENT M
PARY SIŁ JEST WEKTOREM SWOBODNYM.
Gdy na ciało sztywne działa n par sił leżących w jednej
płaszczyźnie, to pary te można zastąpić parą wypadkową
o momencie równym sumie momentów poszczególnych par.
n
i
1
i
i
M
M
.
WARUNEK RÓWNOWAGI PAR SIŁ
DZIAŁAJĄCYCH W PŁASZCZYŹNIE
Aby pary sił działające na ciało sztywne w jednej płaszczyźnie
znajdowały się w równowadze, suma momentów tych par
musi się równać zeru.
0
M
n
i
1
i
i
02 Statyka
20
PŁASKIE UKŁADY
SIŁ DOWOLNIE SKIEROWANYCH
Zastępowanie układu sił działających na ciało sztywne przez
prostszy, równoważny układ sił, nazywa się
REDUKCJĄ UKŁADU SIŁ.
REDUKCJA PŁASKICH UKŁADÓW SIŁ
1.
Płaski układ sił zbieżnych
redukcja do
siły wypadkowej.
2.
Płaski układ sił równoległych zgodnie skierowanych
redukcja do
siły wypadkowej.
3.
Płaski układ sił równoległych przeciwnie skierowanych
redukcja do
siły wypadkowej oraz momentu pary sił.
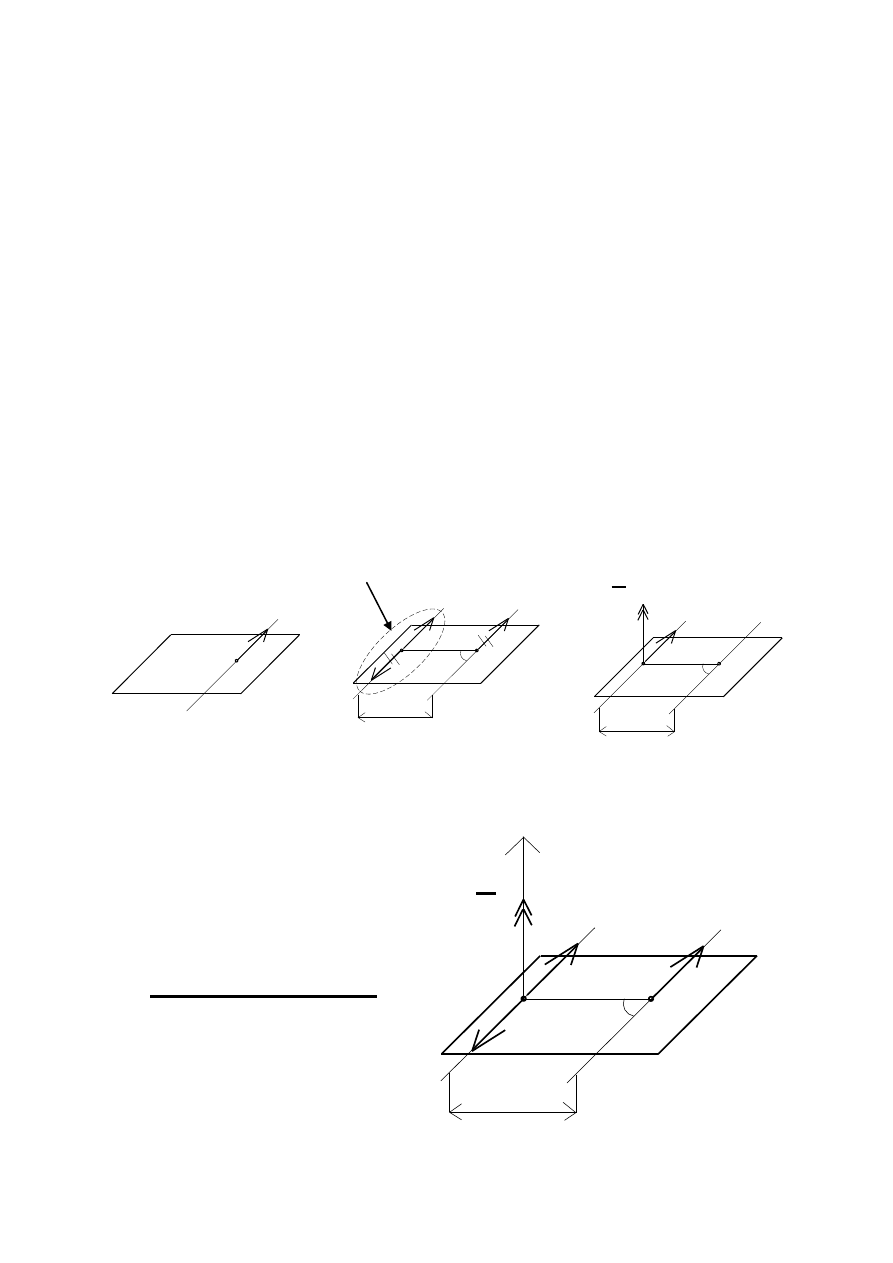
REDUKCJA POJEDYNCZEJ SIŁY
W PŁASKIM UKŁADZIE SIŁ DOWOLNYCH
P
A
h
O
0
90
P
A
P
P
h
0
M
O
0
90
P
A
= P
h
REDUKCJA PŁASKICH UKŁADÓW SIŁ DOWOLNYCH
Siły dowolnie skierowane,
le
żące w jednej wspólnej
płaszczyźnie, redukuje się
do
układu najprostszego,
czyli wypadkowej oraz
pary sił.
P
P
h
Z
0
M
O
0
90
P
-P
A
Zerowy układ sił
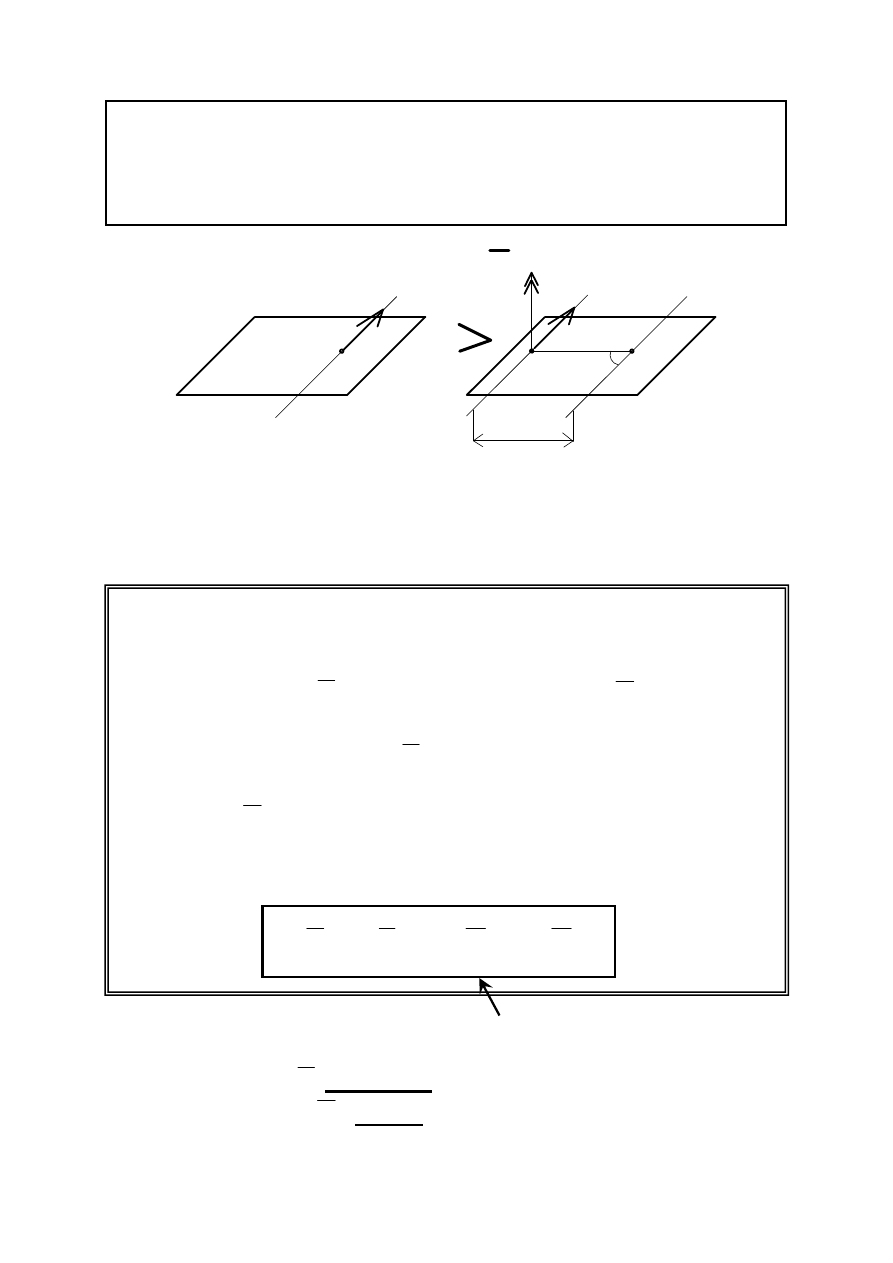
02 Statyka
21
Siłę P przyłożoną do dowolnego punktu A ciała sztywnego
można zastąpić równą jej siłą przyłożoną do dowolnego punktu
O tego ciała, dodając jednocześnie parę sił o momencie rów-
nym momentowi danej si
ły P względem punktu O.
P
A
h
0
M
O
0
90
P
A
= P
h
=
Punkt O
– biegun redukcji, środek redukcji.
Biegunem (środkiem) redukcji może być
dowolny punkt sztywnego ciała.
Każdy układ sił przyłożonych do ciała sztywnego o kierun-
kach działania leżących w jednej płaszczyźnie, równoważ-
ny
jest (może być zastąpiony) układowi złożonemu z jednej
siły wypadkowej R oraz pary sił o momencie
O
M
, przyłożo-
nych do dowolnego punktu O ciała, zwanego biegunem
redukcji. Wypadkowa R
równa jest sumie wektorowej
wszystkich sił i nazywa się wektorem głównym układu sił,
moment
O
M
równy jest sumie momentów wszystkich da-
nych sił względem punktu O i nazywa się momentem
głównym względem bieguna redukcji O.
n
i
1
i
i
P
R
n
i
1
i
Oi
O
M
M
Wektor główny R nie zależy od wyboru bieguna redukcji O.
Moment główny
O
M
zależy od wyboru bieguna redukcji O.
Wektorowy zapis redukcji płaskiego
do
wolnego układu sił.
02 Statyka
22
Analityczny zapis redukcji dowolne
go układu sił:
A
P
X
Y
P
P
i
xi
yi
A
i
y
i
A
1
P
1
A
2
P
2
3
P
3
O
R
M
O
'
x
i
Y
'
O
X
'
n
i
1
i
i
P
R
n
i
1
i
Xi
X
P
R
,
n
i
1
i
Yi
Y
P
R
i
Xi
i
Yi
Oi
y
P
x
P
M
n
i
1
i
Oi
O
M
M
n
i
1
i
i
Xi
i
Yi
n
i
1
i
Oi
O
y
P
x
P
M
M
R
R
sin
,
R
R
cos
y
X
ZMIANA BIEGUNA REDUKCJI
Wektor główny R nie zmienia się
przy zmianie bieguna redukcji.
Moment główny
O
M
zmienia się
wraz ze zmianą położenia bieguna redukcji.
X
Y
O
R
M
O
X'
Y'
O'
R
M
O'
Redukcja względem punktu O
Redukcja względem punktu O’
02 Statyka
23
REDUKCJA PŁASKIEGO UKŁADU SIŁ
DO JED
NEJ SIŁY WYPADKOWEJ
W ogólnym przypadku układ sił działających
na ciało sztywne można zredukować do wypadkowej R
oraz momentu pary sił
O
M
.
ZAŁOŻENIE:
0
P
R
n
i
1
i
i
W przypadku gdy suma wektorowa płaskiego układu sił
n
2
1
P
....,
,
P
,
P
działającego na ciało sztywne jest różna od zera,
to układ ten można zastąpić jedną siłą wypadkową równą
wekto
rowi głównemu R .
0
M
O
=
R
h
0
90
O
C
h
0
90
R
O
C
R
R
=
Punkt C należy odmierzać w takim kierunku, aby znak otrzyma-
nej pary sił był zgodny z kierunkiem
O
M
.
REDUKCJA PŁASKIEGO UKŁADU SIŁ
DO MOMENTU WYPADKOWEGO
ZAŁOŻENIE:
0
P
R
n
i
1
i
i
W przypadku
gdy wektor główny R płaskiego układu sił jest
równy zeru, siły te można zastąpić jedną parą sił o momencie
równym sumie momentów tych sił względem dowolnego punktu
płaszczyzny.
n
i
1
i
Oi
O
M
M
.
Wynik redukcji pła-
skiego układu sił
Wypadkowa dane-
go układu sił
R
M
h
0
02 Statyka
24
REDUKCJA PŁASKIEGO
DOWOLNEGO UKŁADU SIŁ
Dowolny płaski układ sił
(siły skupione, momenty)
X
Y
R
R
R
R
0
M
O
O
O
h=M /R
O
=
=
=
R
Redukcja
do wektora głównego
R
i momentu głównego
O
M
(O
– biegun redukcji,
dowolny punkt
płaszczyzny XY)
Redukcja do jednej siły
02 Statyka
25
Redukcja przestrzennego układu sił do skrętnika
Przestrzenny układ sił:
Przestrzenny układ sił zredukowa-
ny do siły osiowej i momentu skrę-
cającego (skrętnika):
SKRĘTNIK:
02 Statyka
26
RÓWNANIA RÓWNOWAGI
DLA PŁASKIEGO UKŁADU SIŁ
Aby dowolny płaski układ sił był w równowadze
(nie wywoływał ruchu), wektor główny oraz moment
główny tego układu muszą być równe zeru.
0
P
R
n
i
1
i
i
0
M
M
n
i
1
i
Oi
O
.
Zapis algebraiczny (dwa równania rzutów sił, jedno równanie
momentów):
n
i
1
i
Xi
0
P
,
0
P
n
i
1
i
Yi
,
0
M
n
i
1
i
Oi
Równania rzutów mogą zostać zastąpione równaniami momen-
tów względem innych punktów.
WARIANT 1:
Równania równowagi składają się z trzech równań momentów
P
1
P
n
P
3
P
2
A
3
A
1
2
A
A
n
A
B
C
0
M
n
i
1
i
Ai
0
M
n
i
1
i
Bi
0
M
n
i
1
i
Ci
WARUNEK: punkty A, B i C
nie mogą leżeć na jednej prostej.
WARIANT 2:
Równania równowagi składają się z dwóch równań momentów
oraz jednej sumy rzutów sił.
0
P
n
i
1
i
xi
0
M
n
i
1
i
Ai
0
M
n
i
1
i
Bi
WARUNEK: dowolna oś X nie może być prostopadła
do prostej łączącej punkty A i B.
02 Statyka
27
REDUKCJA
PŁASKIEGO
UKŁADU SIŁ RÓWNOLEGŁYCH
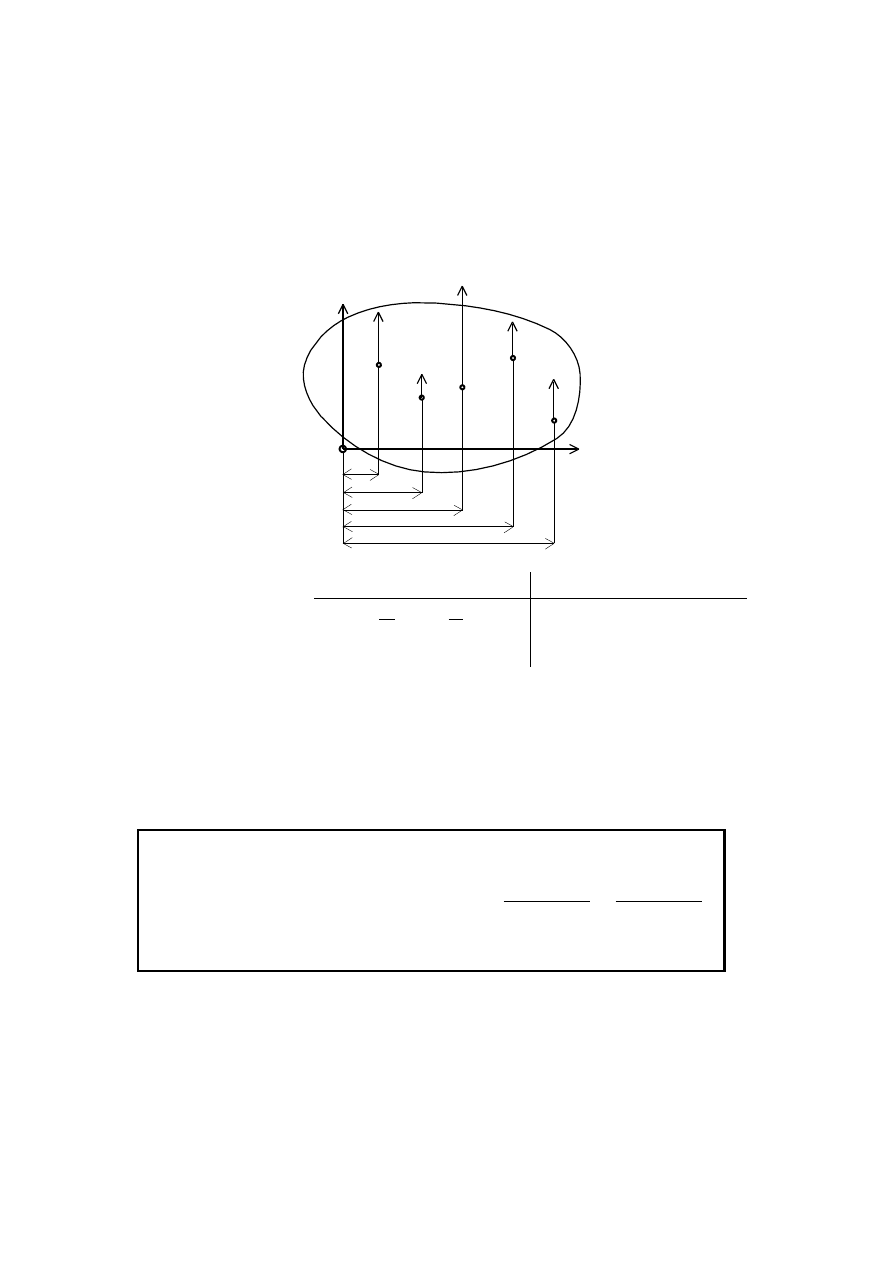
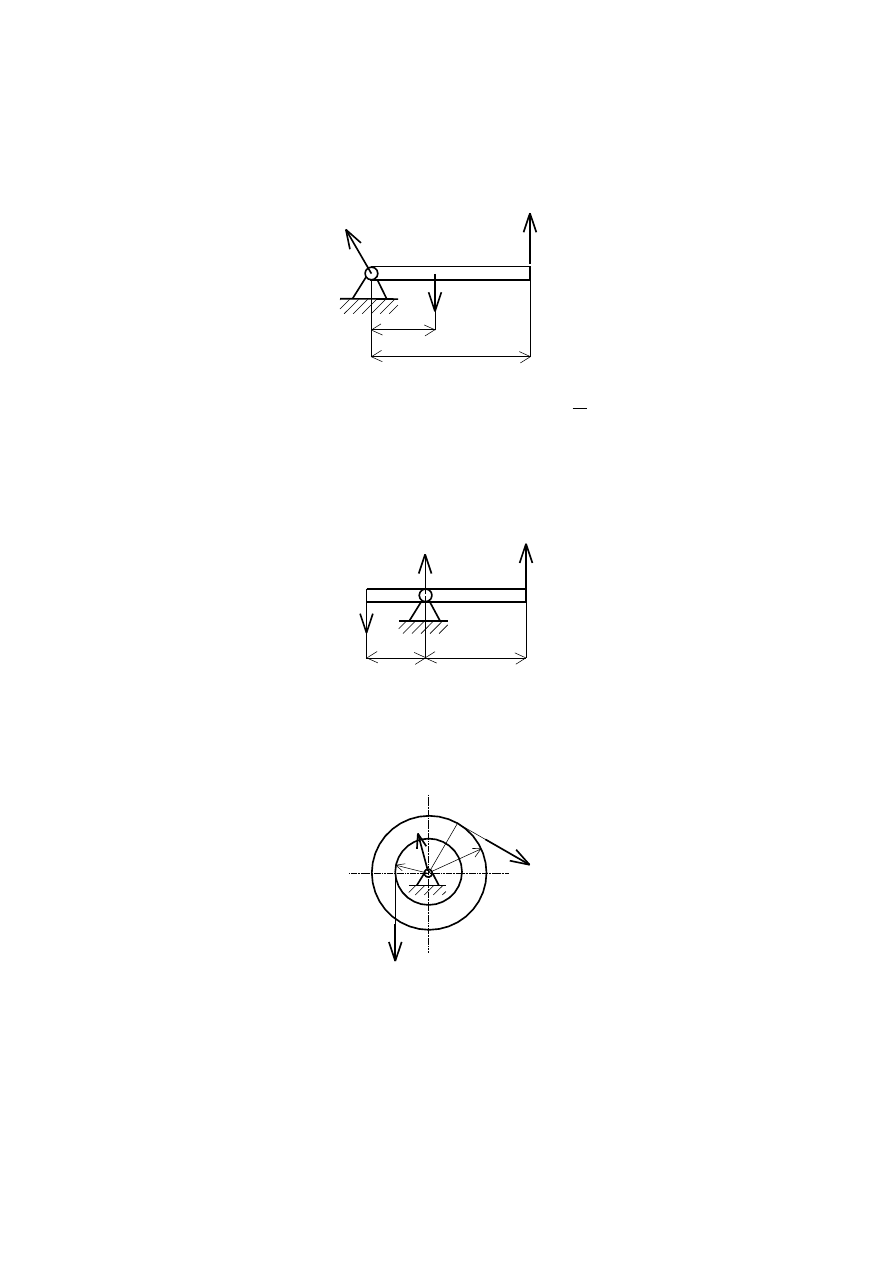
Układ sił równoległych P
1
, P
2
, …, P
n
,
przyłożonych do punktów A
1
, A
2
, …, A
n
ciała sztywnego.
X
Y
x
O
A
2
n
n-1
P
P
P
R
P
1
A
A
A
2
n
n
x
1
x
2
x
n-1
x
n-1
A
1
Wypadkowa sił:
Zapis wektorowy
Zapis skalarny
n
i
1
i
i
P
R
n
i
1
i
i
P
R
Dla sił o zwrocie przeciwnym niż na powyższym rysunku należy
przyjąć znak „–”.
Wyznaczenie linii działania wypadkowej R:
suma momentów wszystkich sił względem punktu O
n
i
1
i
i
x
x
P
x
R
n
i
1
i
x
n
i
1
i
i
x
n
i
1
i
i
x
P
x
P
R
x
P
x
W przypadku, gdy R = 0 układ nie ma wypadkowej i jest rów-
noważny parze sił o momencie
n
i
1
i
i
i
n
i
1
i
Oi
O
x
P
M
M

02 Statyka
28
RÓWNANIA RÓWNOWAGI DLA PŁASKIEGO
UKŁADU SIŁ RÓWNOLEGŁYCH:
Suma rzutów sił na oś równoległą do kierunku działania sił:
0
P
P
R
n
i
1
i
iy
n
i
1
i
i
,
Suma momentów względem dowolnego punktu O:
0
M
M
n
i
1
i
Oi
O
.
W płaskim układzie sił równoległych występują dwie niewiado-
me wielkości.
Równanie sumy rzutów sił można zastąpić równaniem momen-
tów. A, B – dowolne punkty nie leżące na prostej
równoległej do kierunku działania sił, wówczas:
0
M
n
i
1
i
A
0
M
n
i
1
i
B
02 Statyka
29
SIŁY ROZŁOŻONE – OBJĘTOŚCIOWE,
POWIERZCHNIOWE I LINIOWE
Siły objętościowe (masowe) – ciężar (siły grawitacji).
Siły powierzchniowe (CIŚNIENIE).
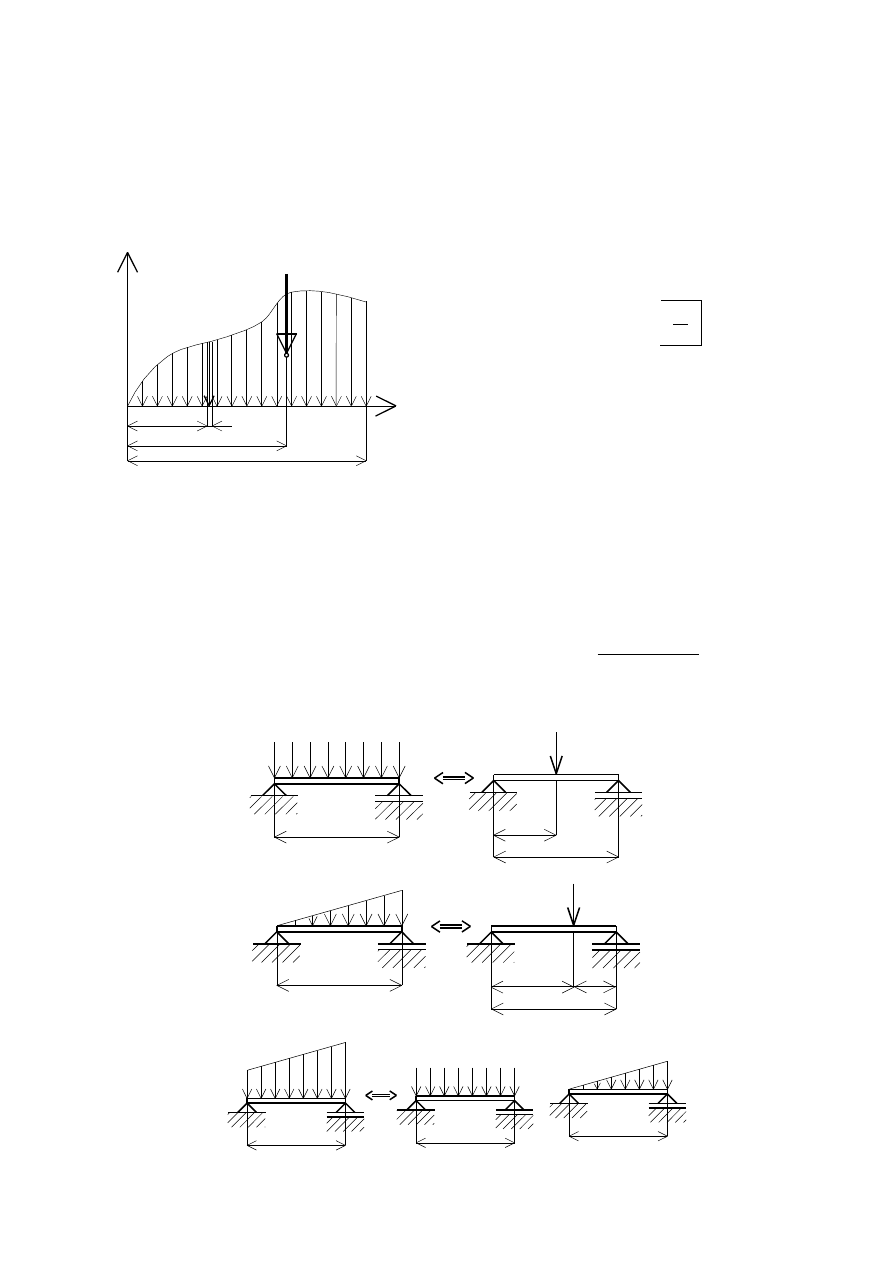
Siły rozłożone wzdłuż linii:
q(x)dx
dx
L
q(x)
Y
X
x
x
C
Q
0
Intensywność
obciążenia ciągłego q:
wymiar [q]:
m
N
dQ=q(x)
dx
L
0
dx
)
x
(
q
Q
Siłą Q zastępuję działanie obciążenia ciągłego rozłożo-
nego na odcinku o długości L – jest to wypadkowa obcią-
żenia ciągłego. Punkt przyłożenia obciążenia zastępcze-
go Q wyznacza się z sumy momentów względem 0:
L
0
C
0
0
dx
)
x
(
q
x
x
Q
M
→
Q
dx
)
x
(
q
x
x
L
0
c
PRZYKŁADY:
L
q=const
L
F=qL
x
C
=0,5L
L
q
L
F=1/2 qL
=1/3L
x
C
=2/3L
x
C
L
L
2
q
1
q
1
q
1
q
2
q -
L
02 Statyka
30
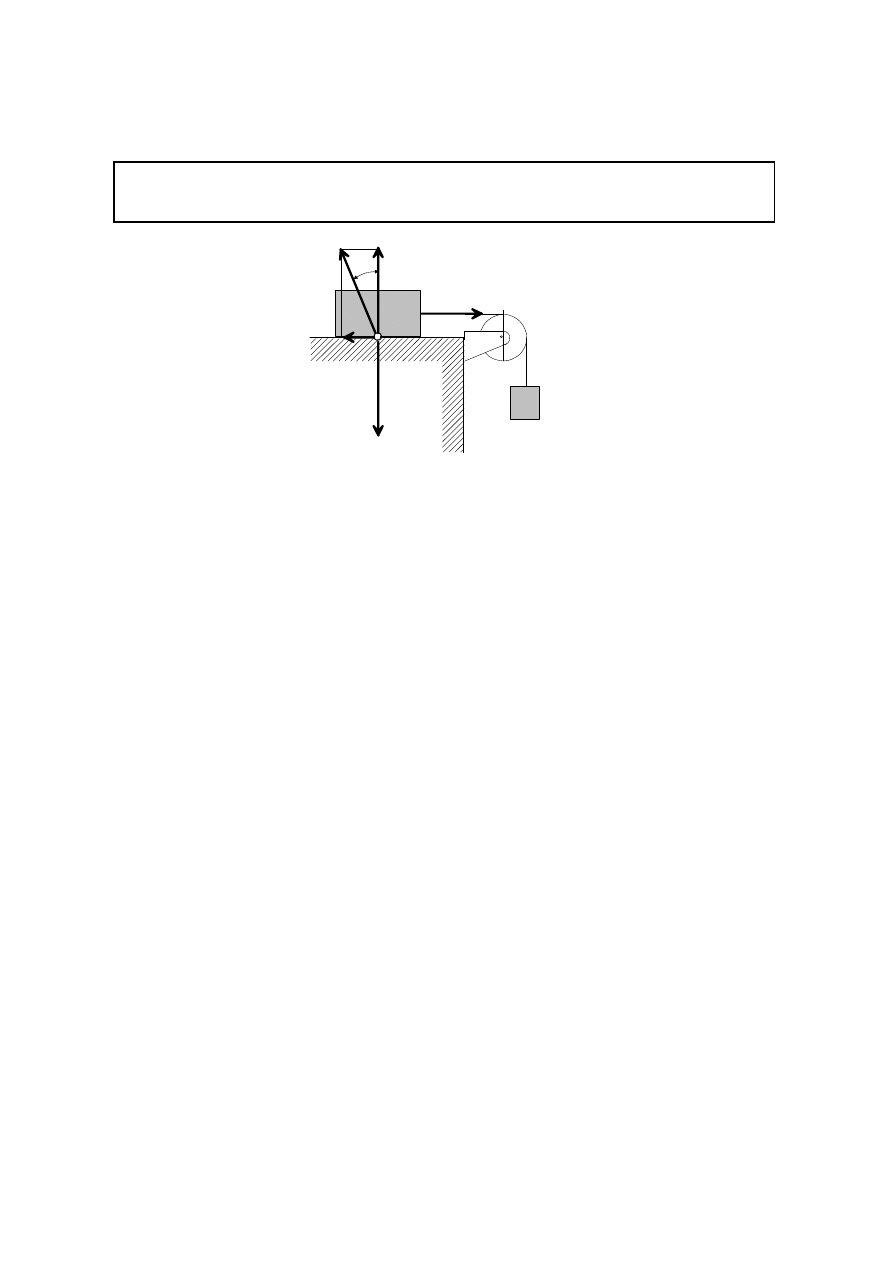
Warunki równowagi dla płaskich układów sił
Układ sił
Warunki równowagi
Zbieżny układ sił
1.
n
i
xi
P
1
0
2.
0
1
n
i
yi
P
Układ sił równoległych
1
.
n
i
n
i
Oi
yi
M
;
P
1
1
0
0
(0
– dowolny punkt)
2
.
n
i
n
i
Bi
Ai
M
,
M
1
1
0
0
(A, B
– dowolne punkty nie leżące na prostej
równoległej do kierunku działania sił)
Układ sił
dowolnie skierowanych
1
.
n
i
Oi
n
i
yi
n
i
xi
M
,
P
,
P
1
1
1
0
0
0
(0
– dowolny punkt)
2.
n
i
Ci
n
i
Bi
n
i
Ai
M
,
M
,
M
1
1
1
0
0
0
(A, B, C
– nie mogą leżeć na jednej prostej)
3.
n
i
Bi
n
i
Ai
n
i
xi
M
,
M
,
P
1
1
1
0
0
0
(Oś X nie może być prostopadła do prostej AB)
02 Statyka
31
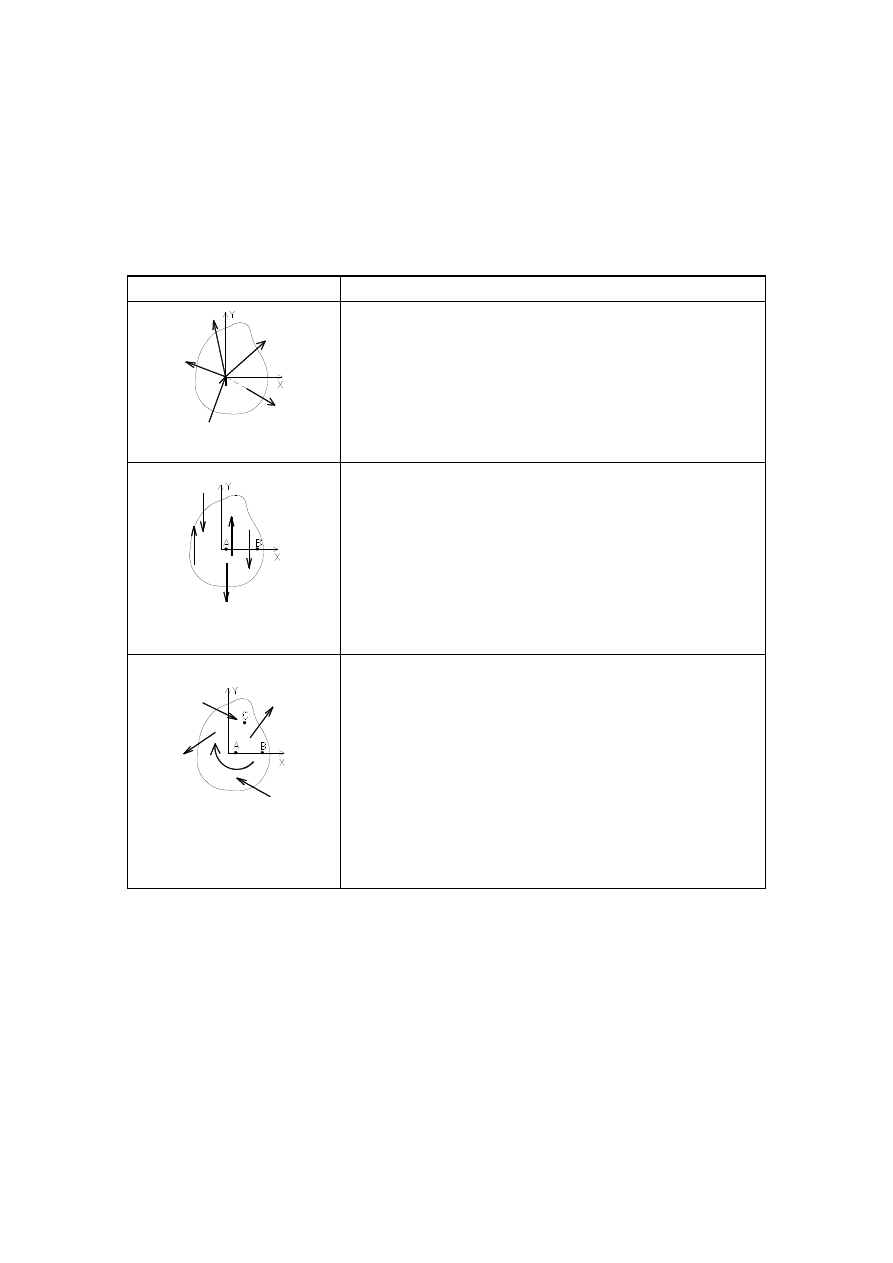
Warunki równowagi dla przestrzennych układów sił
Układ sił
Warunki równowagi
Z
X
Y
Zbieżny układ sił
1.
n
i
xi
P
1
0
2.
0
1
n
i
yi
P
3.
0
1
n
i
zi
P
Z
X
Y
Równoległy układ sił
1.
n
i
yi
P
1
0
2.
0
1
n
i
xi
M
3.
0
1
n
i
zi
M
(dotyczy sił równoległych w kierunku osi Y)
Z
X
Y
Układ sił
dowolnie skierowanych
1.
n
i
xi
P
1
0
2.
n
i
xi
P
1
0
3.
n
i
xi
P
1
0
4.
n
i
Xi
M
1
0
5.
n
i
Yi
M
1
0
6.
n
i
Zi
M
1
0
02 Statyka
32
INTERPRETACJA ZNAKÓW
W RÓWNANIACH STATYKI
W rozwiązywaniu zadań z mechaniki (oraz wytrzymałości mate-
riałów) nie zawsze można prawidłowo przewidzieć kierunki sił
zewnętrznych biernych (reakcji). Ponieważ równania statyki ma-
ją charakter praw fizycznych, w oparciu o swoją wiedzę i do-
świadczenie, można dokonać założeń o kierunkach tych reakcji.
Po rozwi
ązaniu układu równań statyki poczynione założenia są
weryfikowane:
Gdy otrzymane wartości sił są ze znakiem „
+
”: założenie by-
ło prawidłowe.
Gdy otrzymane wartości sił są ze znakiem „
–
”: założenie było
nie prawidłowe. Prawdziwy kierunek sił jest przeciwny do za-
łożonego.
ZAGADNIENIA
STATYCZNIE WYZNACZALNE
I STATYCZNIE NIEWYZNACZALNE
– Płaski układ sił dowolnie skierowanych – 3 równania statyki.
– Przestrzenny układ sił dowolnie skierowanych – 6 równań
statyki.
W statyce c
iała sztywnego przy zadanych obciążeniach
poszukuje się reakcji podpór.
STATYKA ZAJMUJE SIĘ ZAGADNIENIAMI STATYCZNIE
WY
ZNACZALNYMI, DO ROZWIĄZANIA KTÓRYCH
WY
STARCZAJĄ RÓWNANIA STATYKI.
Płaskie układy sił dowolnie skierowanych – 3 niewiadome.
Przestrzenn
e układy sił dowolnie skierowanych – 6 niewiado-
mych.
Gdy w zadaniu liczba niewiadomych przekroczy liczbę równań
statyki
– ZADANIE STATYCZNIE NIEWYZNACZALNE, dla
rozwiązania którego trzeba odstąpić od modelu ciała sztywnego
WYTRZYMAŁOŚĆ MATERIAŁÓW.
02 Statyka
33
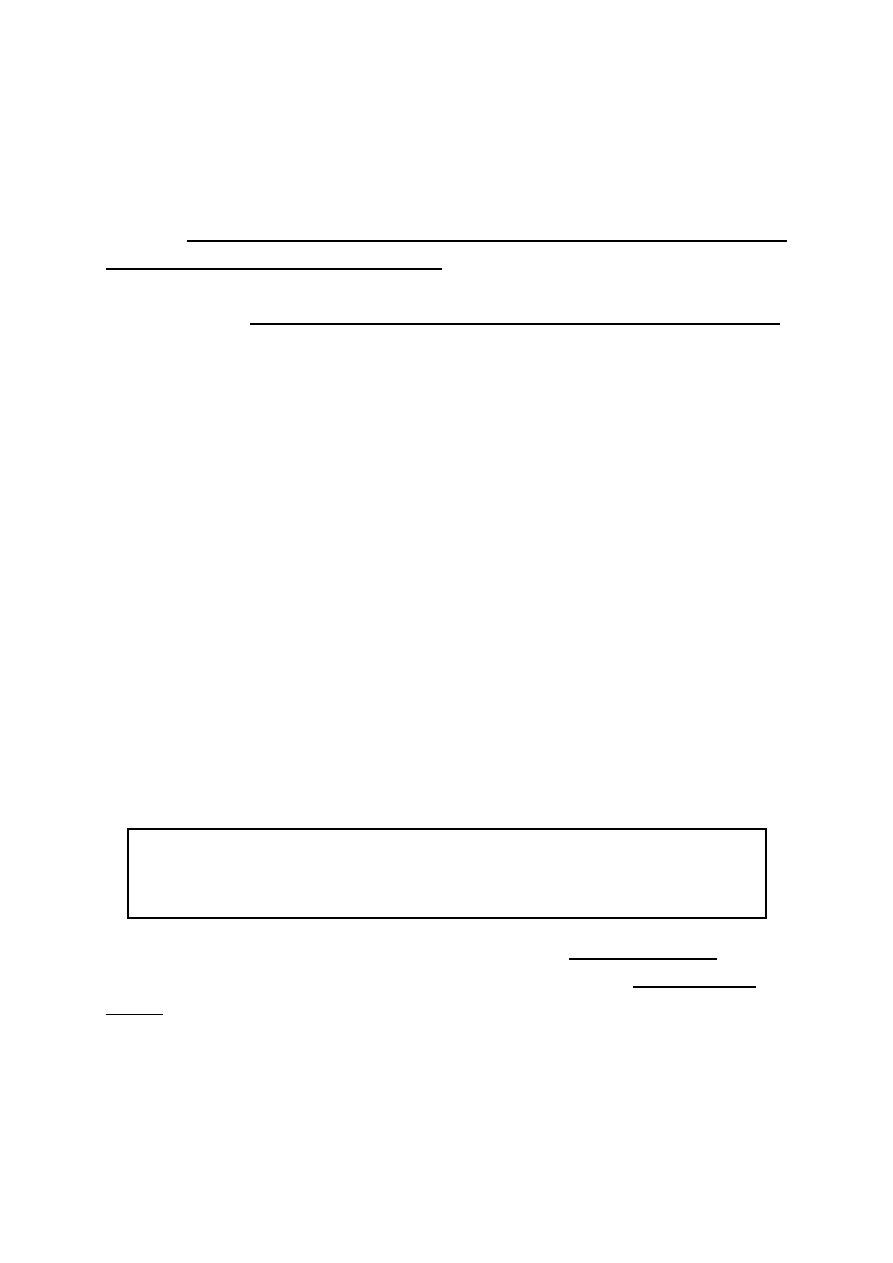
T A R C I E
Model ciał idealnie gładkich – siły reakcji są prostopadłe
do powierzchni.
N
P
G
R
T
P
– siła zewnętrzna czynna (obciążenie),
G
– siła zewnętrzna czynna (ciężar),
R
– reakcja,
N
– składowa normalna reakcji,
T
– siła tarcia.
CIAŁO ZNAJDUJE SIĘ W RÓWNOWADZE
GDY SIŁA P < T LUB P = T.
Gdy P > T
– ciało zacznie się porusza (ślizgać).
Wartość siły tarcia jest ograniczona i nie może przekroczyć
pewnej maksymalnej wartości.
PRAWA TARCIA COULOMBA:
1.
Siła tarcia posuwistego leży w płaszczyźnie poruszających się
ciał i jest skierowana w kierunku możliwego przesuwu ciała.
Siła tarcia wynosi 0
T
T
max
. Wartość T
max
siła tarcia osiąga
w chwili utraty równowagi.
2.
Siła tarcia jest niezależna od pola powierzchni stykających się
ciał. Zależy jedynie od materiału, jego właściwości fizycznych,
temperatury, smarowania, wilgotności itp.
3.
Maksymalna siła tarcia jest proporcjonalna do wielkości
reakcji normalnej.
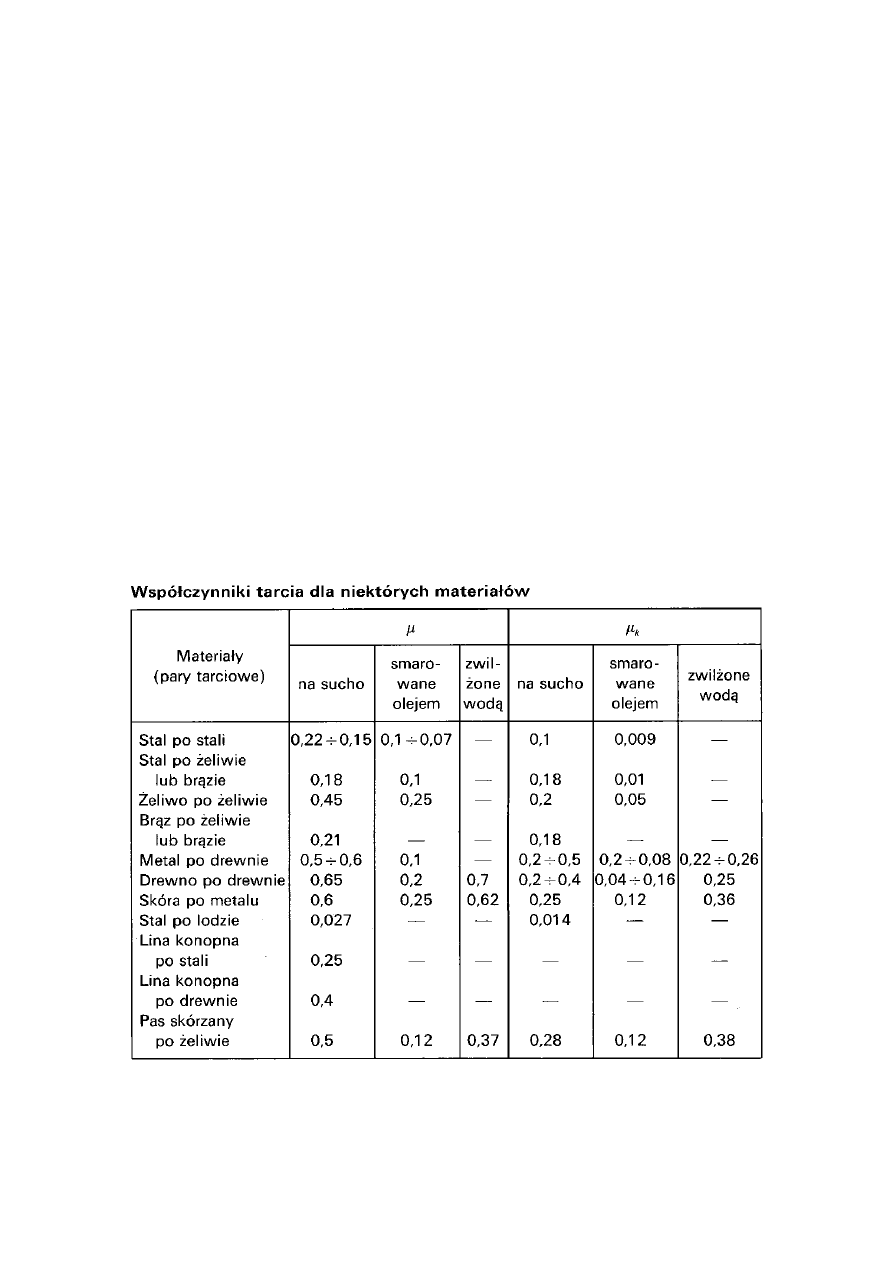
02 Statyka
34
Dla ciała w spoczynku:
T
N.
Dla ciała w ruchu:
T =
k
N.
Maksymalna siła tarcia: T =
N,
– współczynnik tarcia
spoczynkowego
(statycznego). Dla ciała w ruchu (ślizgającego
się):
k
– współczynnik tarcia kinetycznego. Ponieważ
>
k
,
tarcie spoczynkowe jest większe od tarcia kinetycznego.
Rozwiązywanie zagadnień równowagi (statyka) z uwzględnie-
niem tarcia polega na określaniu granicznych wartości
sił utrzymujących ciało w równowadze.
Rodzaje tarcia:
– tarcie suche,
– tarcie półsuche (półpłynne),
– tarcie płynne (smarowanie zmniejszające opór tarcia).
02 Statyka
35
MASZYNY PROSTE
1.
DŹWIGNIA JEDNOSTRONNA
P
Q
a
b
R
Q
b = P
a
b
a
P
Q
.
Przykłady: taczka, gilotyna.
2.
DŹWIGNIA DWUSTRONNA
P
Q
a
b
R
P
a = Q
b.
Przykłady: waga, pompa.
3.
KOŁOWRÓT
R
Q
P
r
2
1
r
P
r
1
- Q
r
2
= 0,
P
r
1
= Q
r
2
.
4.
ŚRUBA
5.
KORBOWÓD
6.
RÓWNIA POCHYŁA
7.
WIELOKRĄŻKI
02 Statyka
36
ŚRODEK CIĘŻKOŚCI
Siły ciężkości (siły przyciągania) – szczególny przypadek sił ob-
jętościowych równoległych (wymiary ciała znikomo małe w po-
równaniu z promieniem kuli ziemskiej).
Środkiem ciężkości ciała materialnego (bryły) nazywa się gra-
niczne położenie środka sił równoległych, które są siłami cięż-
kości poszczególnych cząstek bryły na jakie myślowo została
bryła podzielona, gdy największa z tych cząstek dąży do zera.
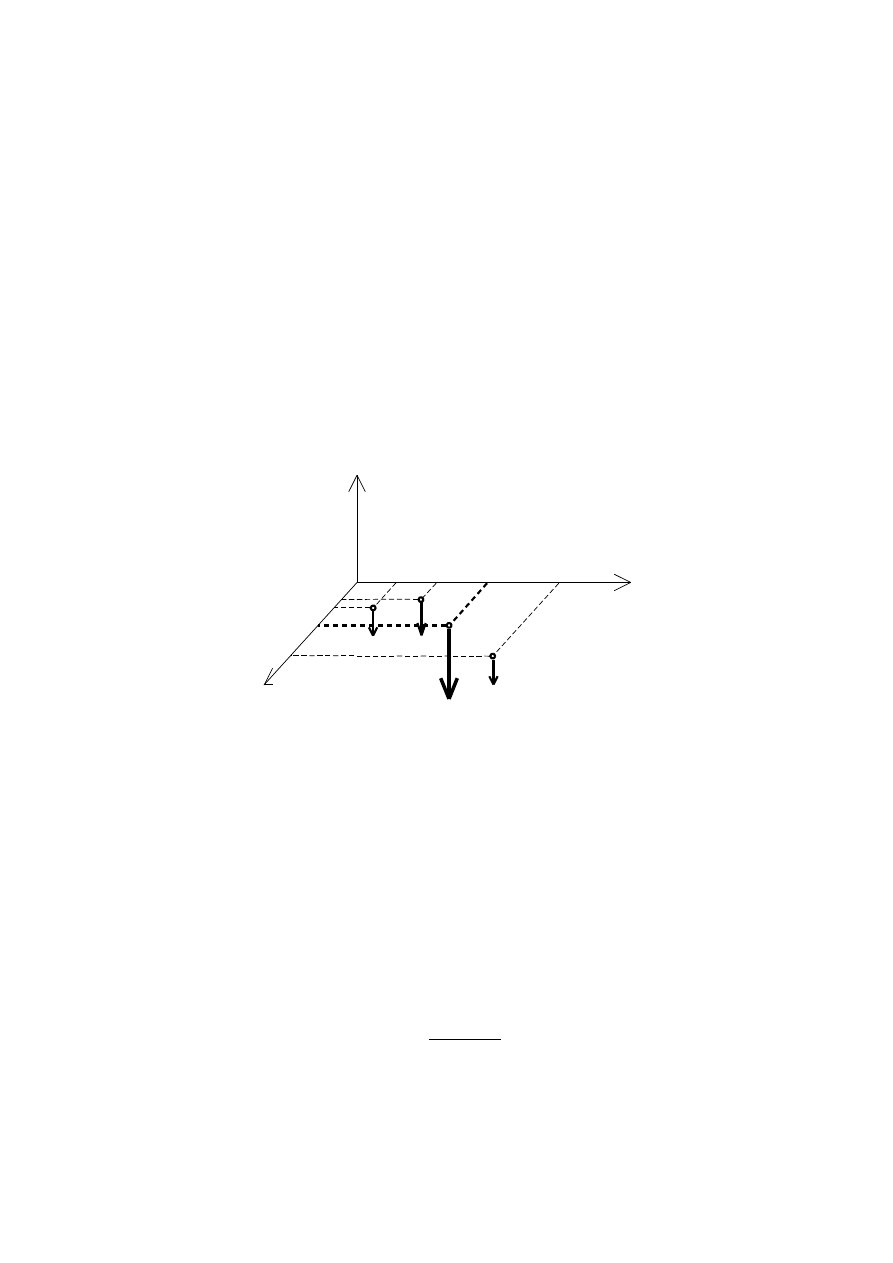
ŚRODEK PRZESTRZENNEGO UKŁADU
SIŁ RÓWNOLEGŁYCH
C
0
1
2
3
Z
X
y
A
A
A
W
P
1
2
3
P
P
x
x
y
y
y
y
x
1
2
2
3
3
c
c
x
1
Dla dowolnej liczby n sił równoległych P
i
, przyłożonych
w punktach A
i
(x
i
, y
i
) wypadkowa
n
i
i
i
P
W
1
.
Moment wypadkowej W(x
c
, y
c
) względem osi Y jest równy su-
mie momentów sił składowych:
n
i
i
n
n
n
n
c
x
P
x
P
...
x
P
x
P
x
W
1
2
2
1
1
.
Współrzędna punktu przyłożenie wypadkowej W wynosi
i
i
i
c
P
x
P
x
.
02 Statyka
37
Z równań momentów względem osi X oraz Z otrzymuje się
i
i
i
c
P
y
P
y
i
i
i
c
P
z
P
z
Punkt C
– środek sił równoległych.
Siły P
i
– siły ciężkości
ŚRODEK CIĘŻKOŚCI CIAŁĄ
CIĘŻAR WŁAŚCIWY:
3
m
N
]
[
.
Ciężar = masa
przyspieszenie ziemskie g
→ .
g
.
GĘSTOŚĆ CIAŁA:
3
m
kg
]
[
.
PRZYPADKI SZCZEGÓLNE
– Środek ciężkości brył.
– Środek ciężkości powierzchni.
– Środek ciężkości figur płaskich.
– Środek ciężkości linii.
FIGURY PŁASKIE
Grubość figury = 0, objętość
pole powierzchni A [m
2
]
z
c
= 0, P
i
=
A
i
,
– ciężar jednostkowy [N/m
2
]
i
i
i
c
P
x
P
x
i
i
i
c
A
x
A
x
,
A
i
x
i
– moment statyczny [cm
3
] względem osi X (A
i
y
i
– względem osi Y).
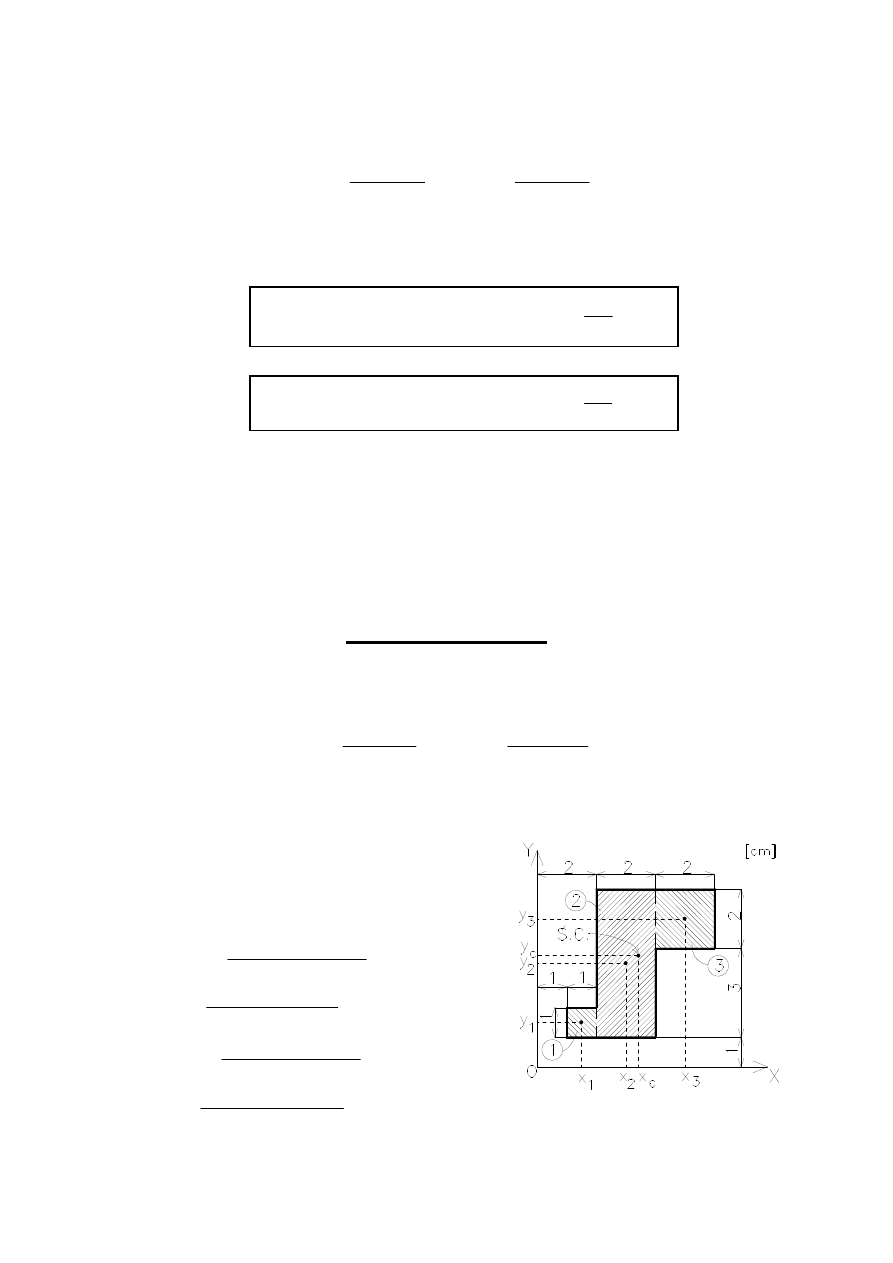
PRZYKŁAD: Określanie środka powierzchni fi-
gury płaskiej: A
1
= 1
1 = 1 cm
2
, A
2
= 2
5 = 10 cm
2
,
A
3
= 2
2 = 4 cm
2
,
3
2
i
.
cm
15
A
A
Współrzędne środka ciężkości figury wynoszą:
,
cm
43
,
3
4
10
1
5
4
3
10
5
,
1
1
A
A
A
x
A
x
A
x
A
x
3
2
1
3
3
2
2
1
1
c
.
cm
77
,
3
4
10
1
5
4
5
,
3
10
5
,
1
1
A
A
A
y
A
y
A
y
A
y
3
2
1
3
3
2
2
1
1
c
Wyszukiwarka
Podobne podstrony:
zagadnienia z terii mechanika, Prywatne, Budownictwo, Materiały, Semestr II, II semestr, mechanika o
mechanika plynow teoria ściąga
mechanika budowli teoria sciaga
Mechanika ogólna 2 teoria na egzam
Mechanika - Statyka, statykawyklad6, Środek ciężkości
Mechanika - Statyka, cwiczeniastatyka3, Ćwiczenia statyka 3
Mechanika - Statyka, statykawyklad1, Statyka Wykład 1
Mechanika ogólna-teoria, Semestr 2
Mechanika - Statyka, cwiczeniastatyka2, Ćwiczenie statyka 2
Mechanika Plynow Teoria id 2912 Nieznany
mechanika2 opracowanie teoria
Mechanika - Statyka, statykawyklad2, Statyka Wykład 2
Mechanika ogólna 2 teoria na egz
Mechanika Analityczna Teoria
Szkic do wykladow z mechaniki statyka
więcej podobnych podstron