Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
2
A) CEL ĆWICZENIA
1. Poznanie
właściwości podstawowych filtrów RC
(górnoprzepustowy,
dolnoprzepustowy, pasmowy).
2. Dysponując uniwersalnym czwórnikiem RC przeprowadzić syntezę układów
dynamicznych:
a) funkcje transmitancji,
b) charakterystyki amplitudowe w określonym przedziale częstotliwości,
c) charakterystyki fazowe w określonym przedziale częstotliwości.
3. Zaobserwować odpowiedzi jednostkowe wybranych układów (całkującego i
różniczkowego) sterowane przebiegiem prostokątnym.
B) WPROWADZENIE
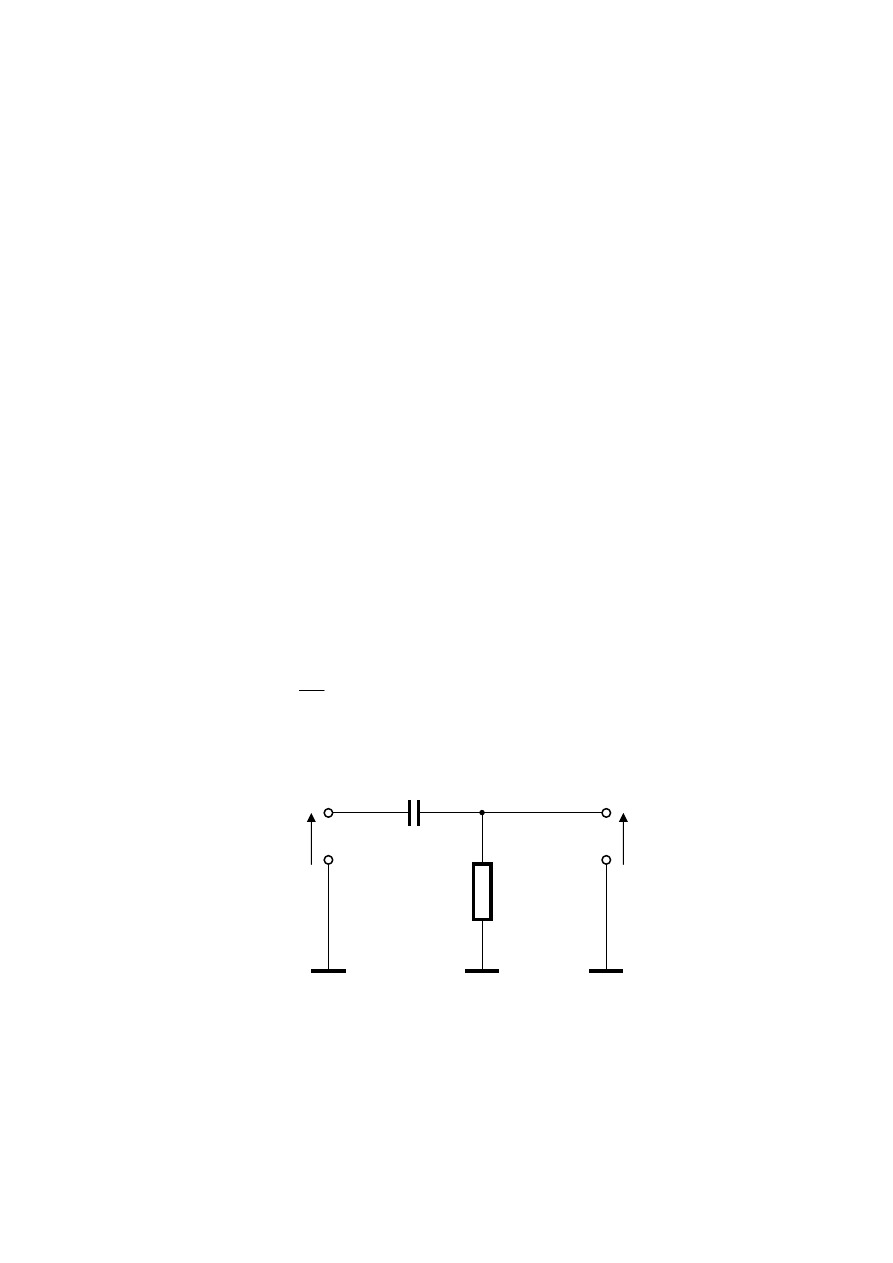
Filtr górnoprzepustowy
Filtr górnoprzepustowy jest układem, który przepuszcza częstotliwości duże, a tłumi
częstotliwości małe i wprowadza dla nich przesunięcie fazowe. Najprostszy układ filtra
górnoprzepustowego RC podano na rys.1. Charakterystyki częstotliwościowe
wzmocnienia
1
2
u
U
U
f
K
i przesunięcia fazowego
f
przedstawiono na rys. 2.
U
2
U
1
C
R
Rys.1. Najprostszy filtr górnoprzepustowy RC
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
3
W celu dokonania analizy charakterystyki częstotliwościowej wzmocnienia i
przesunięcia fazowego obliczamy transmitancję filtra. Stosunek napięć w postaci
zespolonej jest równy:
ωC
j
C
jω
1
1
2
R
R
R
R
U
U
RC
1
tg
arc
;
e
C
1
R
R
U
U
j
2
2
2
1
2
(1)
z powyższego otrzymujemy wyrażenie na wartość bezwzględną wzmocnienia
2
2
2
1
2
1
2
u
C
1
R
R
U
U
U
U
k
(2)
Wielkość
określa przesunięcie fazowe między U
1
i U
2
.
Jest ono zawsze dodatnie, tak
więc napięcie wyjściowe wyprzedza napięcie wejściowe. W celu obliczenia
częstotliwości granicznej korzystamy ze wzoru (2).
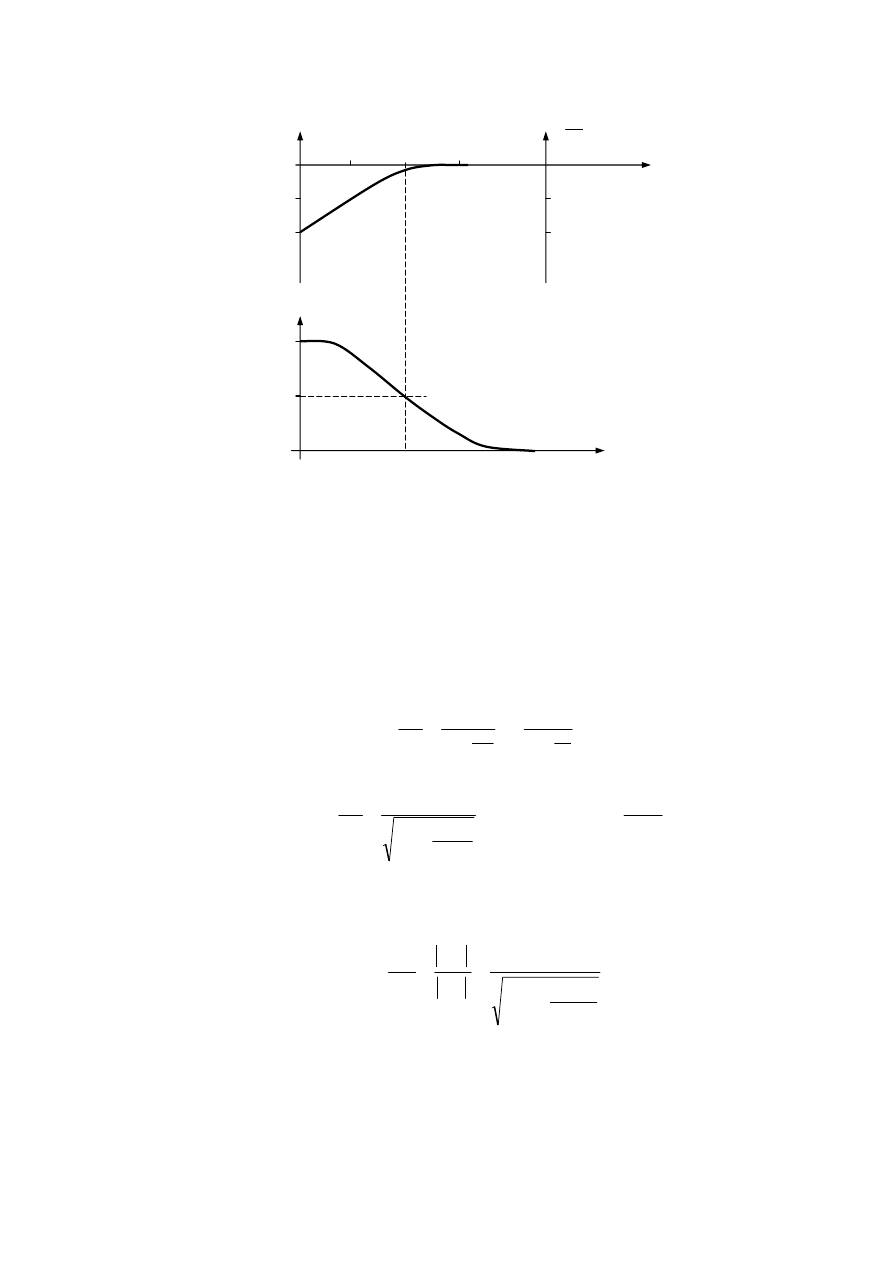
K
u
[dB]
45
0
φ
lg f
lg f
min
1
U
2
U
lg
0
-1
-2
0
-20
-40
3
2 4
lg f
90
a)
b)
Rys.2. Wykres Bodego dla filtra górnoprzepustowego:
a) charakterystyka częstotliwościowa wzmocnienia,
b) charakterystyka częstotliwościowa przesunięcia fazowego
Wartości na osi odciętych podane są jako logarytmy częstotliwości (f
min
= 1kHz)
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
4
2
2
min
2
1
2
C
1
R
R
2
1
U
U
i otrzymujemy
RC
1
f
2
min
min
Przesunięcie fazowe przy tej częstotliwości wynosi 45
.
Ponieważ charakterystykę częstotliwościową wzmocnienia podaje się zazwyczaj
w skali podwójnie logarytmicznej zbadamy jej przebieg, dla małych częstotliwości, przy
tym założeniu. Ze wzoru (2) otrzymamy po logarytmowaniu wyrażenie:
2
2
2
u
C
1
R
lg
2
1
R
lg
k
lg
Dla małych częstotliwości, tj. dla lg
-, będzie:
2
2
u
C
1
lg
2
1
R
lg
k
lg
min
min
u
f
f
lg
lg
RC
lg
k
lg
min
u
f
lg
f
lg
k
lg
(3)
W skali podwójnie logarytmicznej otrzymamy więc asymptotę o nachyleniu
1
f
lg
d
k
lg
d
m
u
Asymptota ta przechodzi przez punkt o współrzędnych (lgf
min
; 0).
W elektronice przyjęto posługiwać się wielkością proporcjonalną do lg k
u
dB
k
lg
20
K
u
u
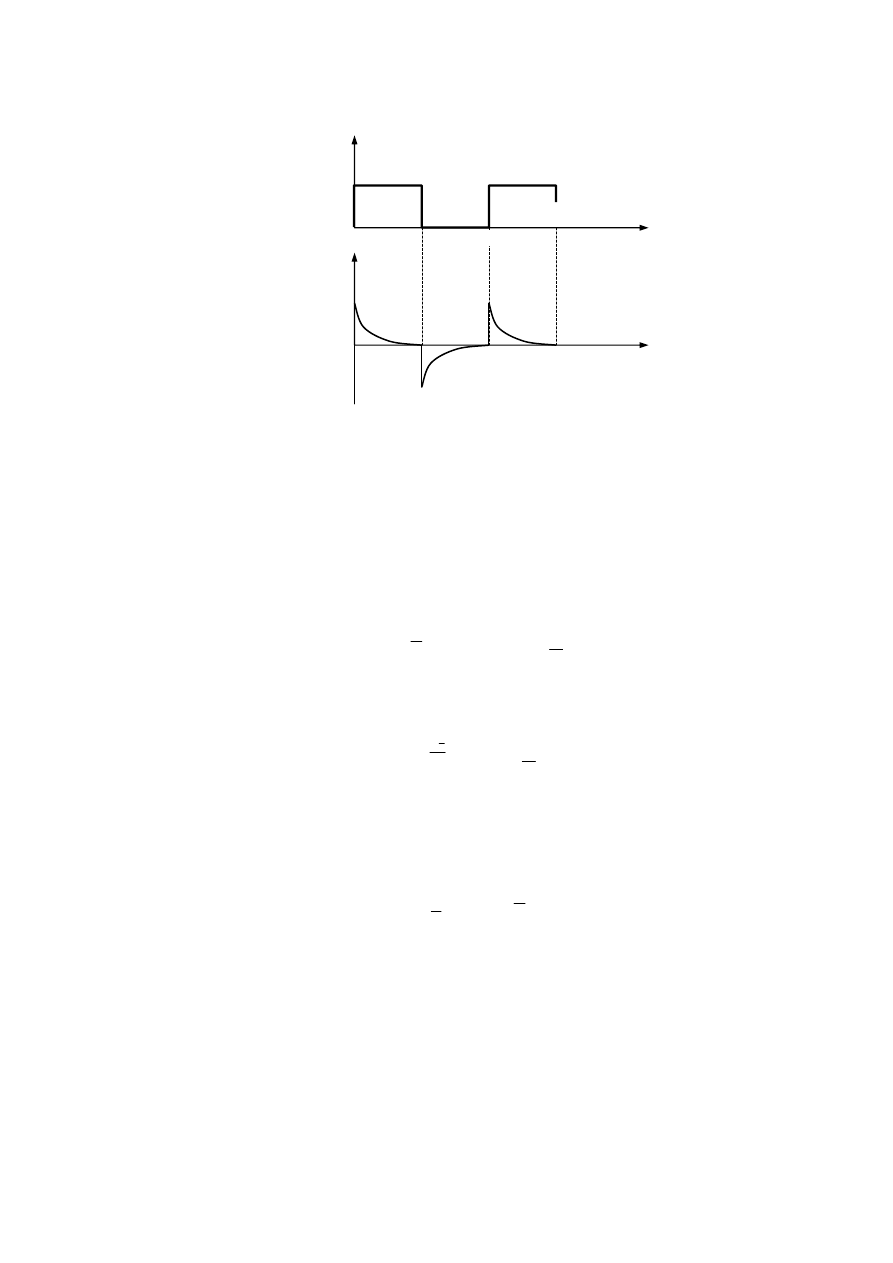
Skoro opisano już sposób działania filtra górnoprzepustowego dla napięć
sinusoidalnych, zbadać należy teraz zachowanie się filtra przy doprowadzeniu do
wejścia napięcia o kształcie prostokątnym. Na rys.3 pokazano przebieg napięcia
wejściowego
2
T
1
2
T
1
t
0
dla
U
T
t
,
0
t
dla
0
u
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
5
oraz napięcia wyjściowego przy T > RC.
Przebieg napięcia wyjściowego określamy stosując prawo Kirchhoffa, w wyniku
tego otrzymujemy:
Przy warunku początkowym u
2
(t = 0) = U
1
będzie
2
T
t
0
dla
e
U
u
RC
t
1
2
Dla następnego przedziału czasowego otrzymuje się odpowiednio
T
t
2
T
dla
e
U
u
RC
2
T
t
1
2
W celu scharakteryzowania, jak szybko zmienia się napięcie wyjściowe, wprowadza się
pojęcie stałej czasowej obwodu. Jest to czas, po którym napięcie wyjściowe osiąga
wartość e razy mniejszą od maksymalnej. Jest zatem:
RC
e
U
U
e
1
u
1
1
2
Wynika stąd, że
= RC
Jeżeli
<< T, to napięcie wyjściowe będzie prawie równe wejściowemu. Ponieważ przez
kondensator nie płynie prąd stały, to wartość średnia napięcia wyjściowego będzie
równa zero. Nie są więc przenoszone składowe stałe napięcia wejściowego.
Jeżeli u
2
<< u
1
, to przez kondensator płynie prąd i = Cu
1
. Dla napięcia
wyjściowego obowiązuje wtedy zależność u
2
= RCu
1
. Układ zachowuje się jak obwód
różniczkujący.
u
2
U
1
U
1
u
1
-U
1
t
t
T
a)
b)
Rys. 3. Odpowiedź filtra górnoprzepustowego na wymuszenie skokowe przy T > RC.
a) napięcie wejściowe, b) napięcie wyjściowe
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
6
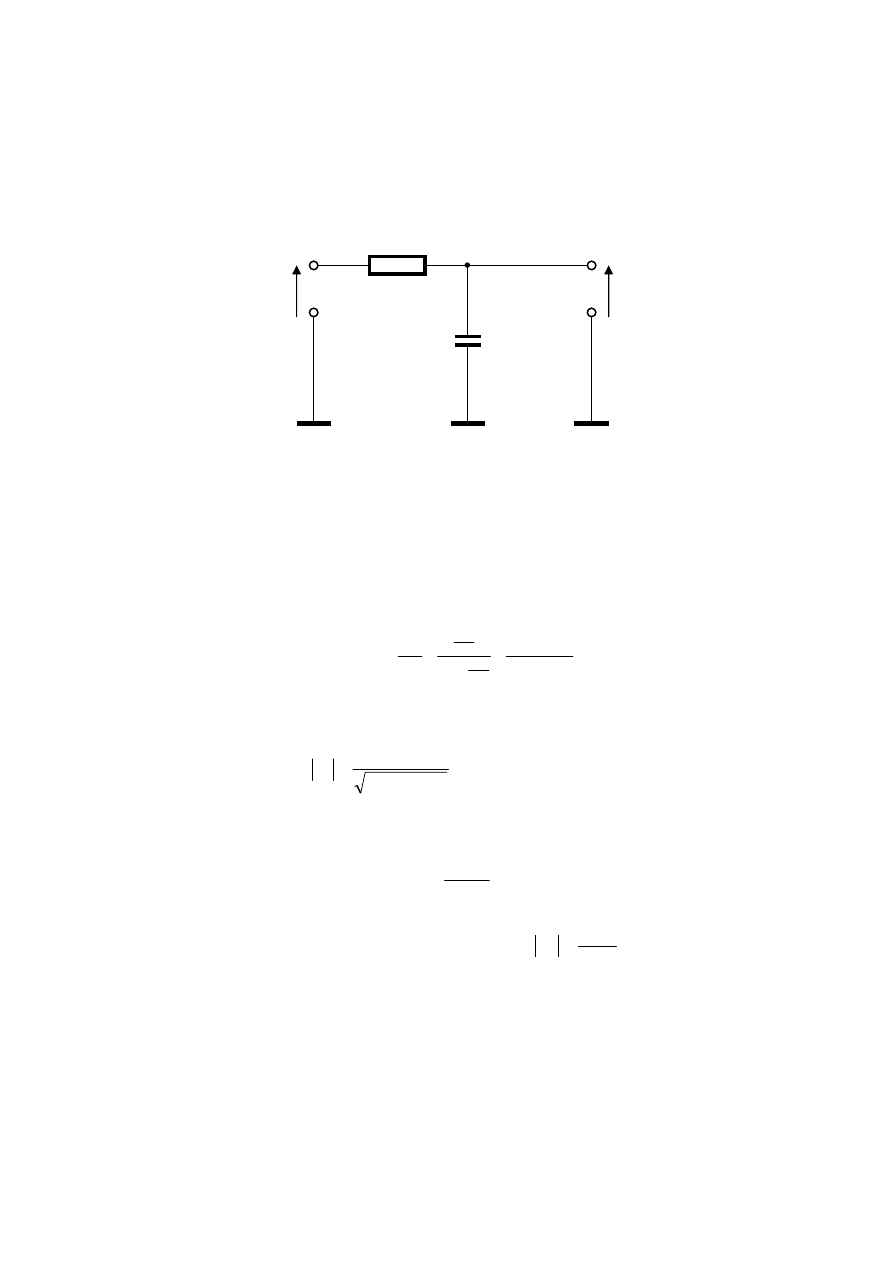
Filtr dolnoprzepustowy
Filtr dolnoprzepustowy jest układem, który „przepuszcza” częstotliwości małe, a
tłumi częstotliwości duże i wprowadza dla nich przesunięcie fazowe. Najprostszy układ
filtra dolnoprzepustowego RC podano na rys.4.
Charakterystyki częstotliwościowe wzmocnienia i przesunięcia fazowego
otrzymujemy rozważając dzielnik napięć
RC
j
1
1
R
U
U
k
C
j
1
C
j
1
1
2
u
(4)
stąd otrzymujemy
RC
tg
arc
i
C
R
1
1
k
2
2
2
u
(5)
Na górną częstotliwość graniczną otrzymujemy wzór
RC
2
1
f
max
Dla
częstotliwości dużych f >> f
max
będzie
RC
1
k
u
; wzmocnienie jest w tym
zakresie odwrotnie proporcjonalne do częstotliwości. Znając f
max
można zbudować
charakterystykę częstotliwościową wzmocnienia, szczególnie łatwo w skali podwójnie
logarytmicznej. Ze wzoru (5) otrzymamy w taki sam sposób jak dla filtra
górnoprzepustowego, następujące zasady konstrukcji charakterystyki:
U
2
U
1
C
R
Rys. 4. Najprostszy filtr dolnoprzepustowy RC.
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
7
1) Dla małych częstotliwości f < f
max
asymptotą jest zero, ponieważ
0
U
U
lg
1
2
2) Dla dużych częstotliwości f > f
max
stosunek
1
2
U
U
maleje o połowę przy
dwukrotnym zwiększeniu częstotliwości. Odpowiada to spadkowi wzmocnienia 6
dB na oktawę lub 20 dB na dekadę. Asymptotą jest prosta o tym nachyleniu
przechodząca przez f punkt o współrzędnych (lg f
max
; 0).
3) Prosta o nachyleniu -10dB na dekadę, przechodząca przez punkt o
współrzędnych (lgf
max
; -3dB) jest styczna do charakterystyki częstotliwościowej
wzmocnienia.
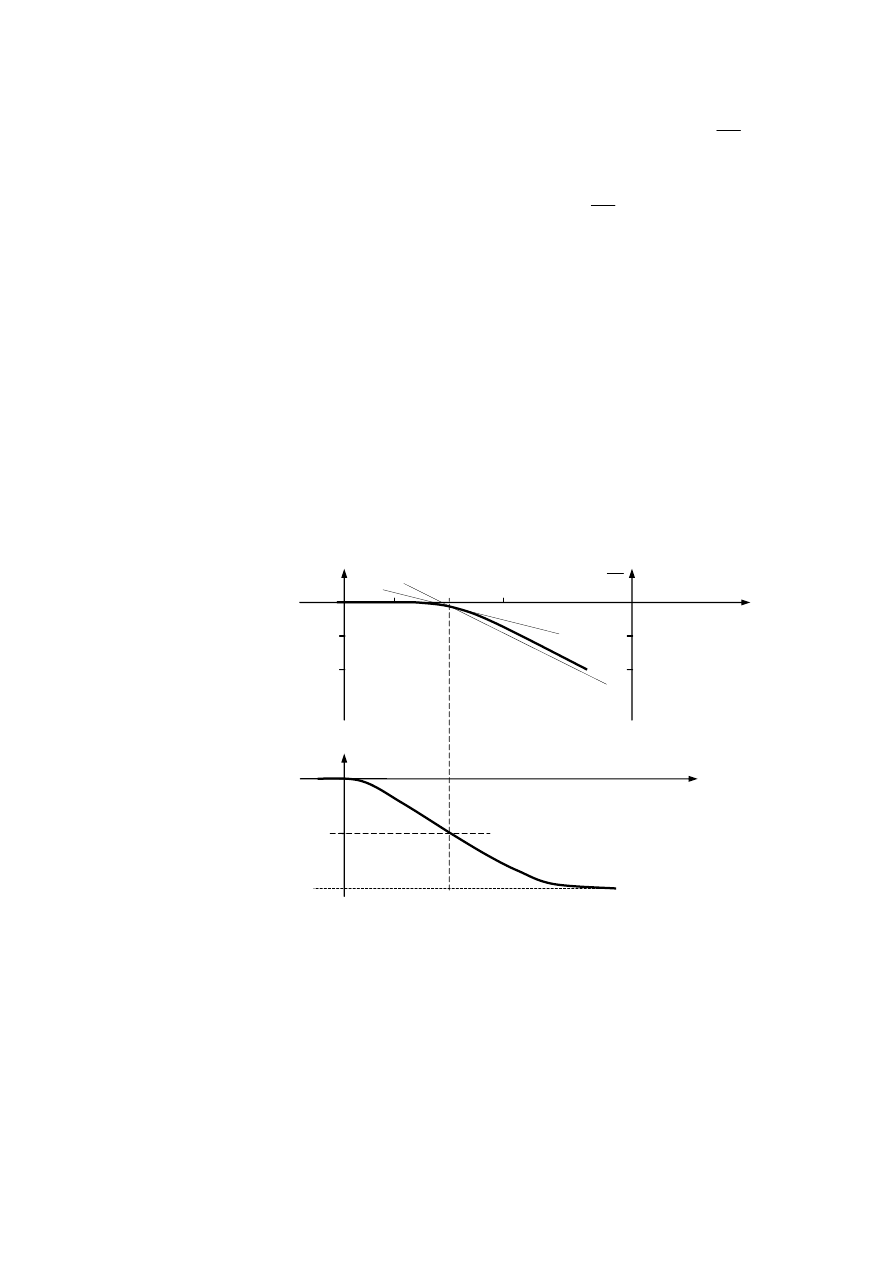
Przesunięcie fazowe w filtrze dolnoprzepustowym jest ujemne. Powyższe
rozumowanie przedstawiono na rys.5.
K
u
[dB]
-45
0
φ
lg f
lg f
max
0
-20
-40
3
2 4
lg f
-90
a)
b)
Rys.5. Wykres Bodego dla filtra dolnoprzepustowego:
a) charakterystyka częstotliwościowa wzmocnienia,
b) charakterystyka częstotliwościowa przesunięcia fazowego
0
-1
-2
1
2
U
U
lg
lg f
max
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
8
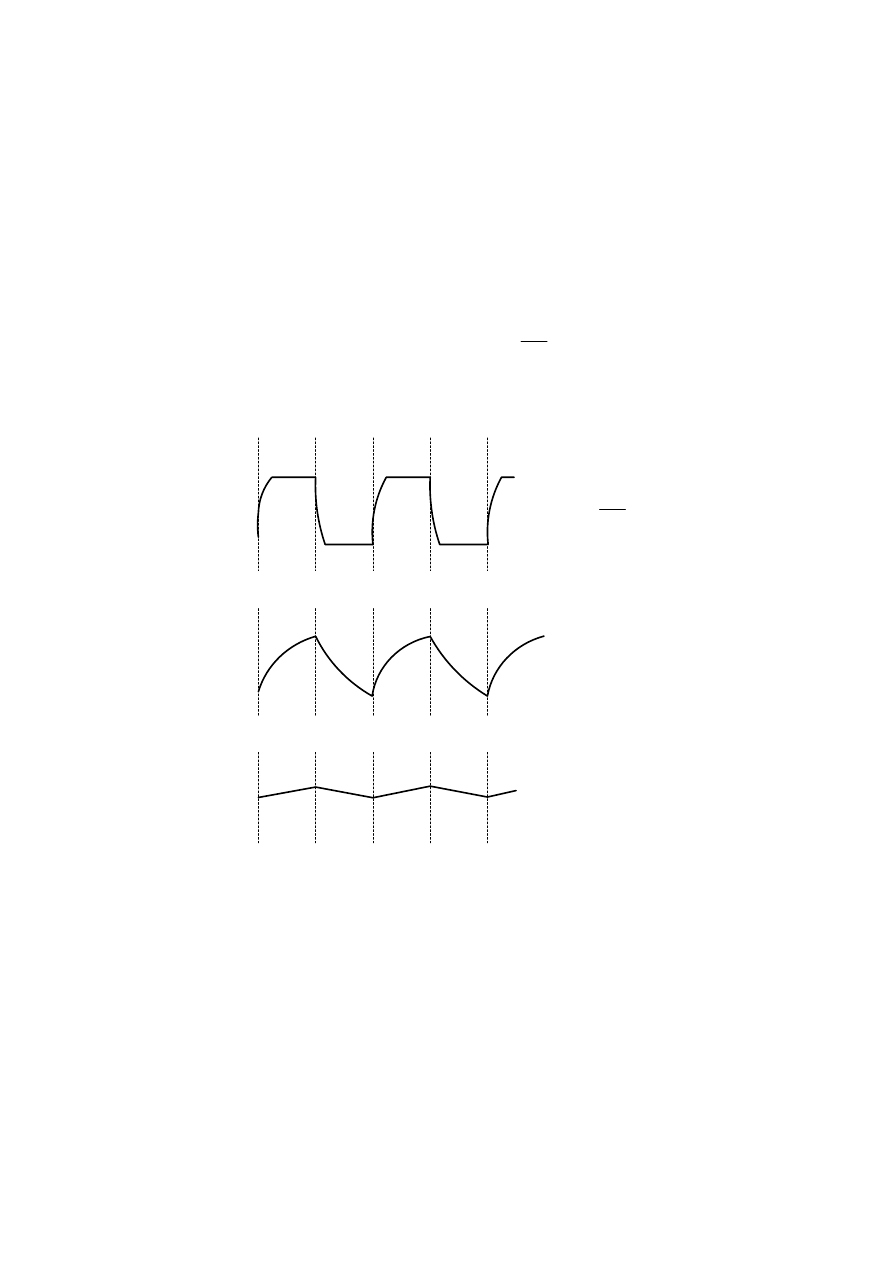
Na rys.6 podano odpowiedzi filtra dolnoprzepustowego na wymuszenie
impulsami prostokątnymi o różnych częstotliwościach. Narastanie i opadanie krzywej
odbywa się tu także wg funkcji e ze stałą czasową
= RC.
Można wyróżnić trzy charakterystyczne zakresy częstotliwości:
1) Dla f << f
min
napięcie u
2
= u
1
.
2) Dla f
f
max
napięcie u
2
jest kombinacją liniową przeniesionej oraz scałkowanej
wielkości u
1
.
3) Dla f >> f
max
obowiązuje zależność
dt
u
RC
1
u
1
2
W tym zakresie częstotliwości układ zachowuje się jak obwód całkujący.
g
f
10
1
f
g
f
f
g
10f
f
Rys. 6. Odpowiedzi filtra dolnoprzepustowego na wymuszenie impulsami prostokątnymi o
różnej częstotliwości.
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
9
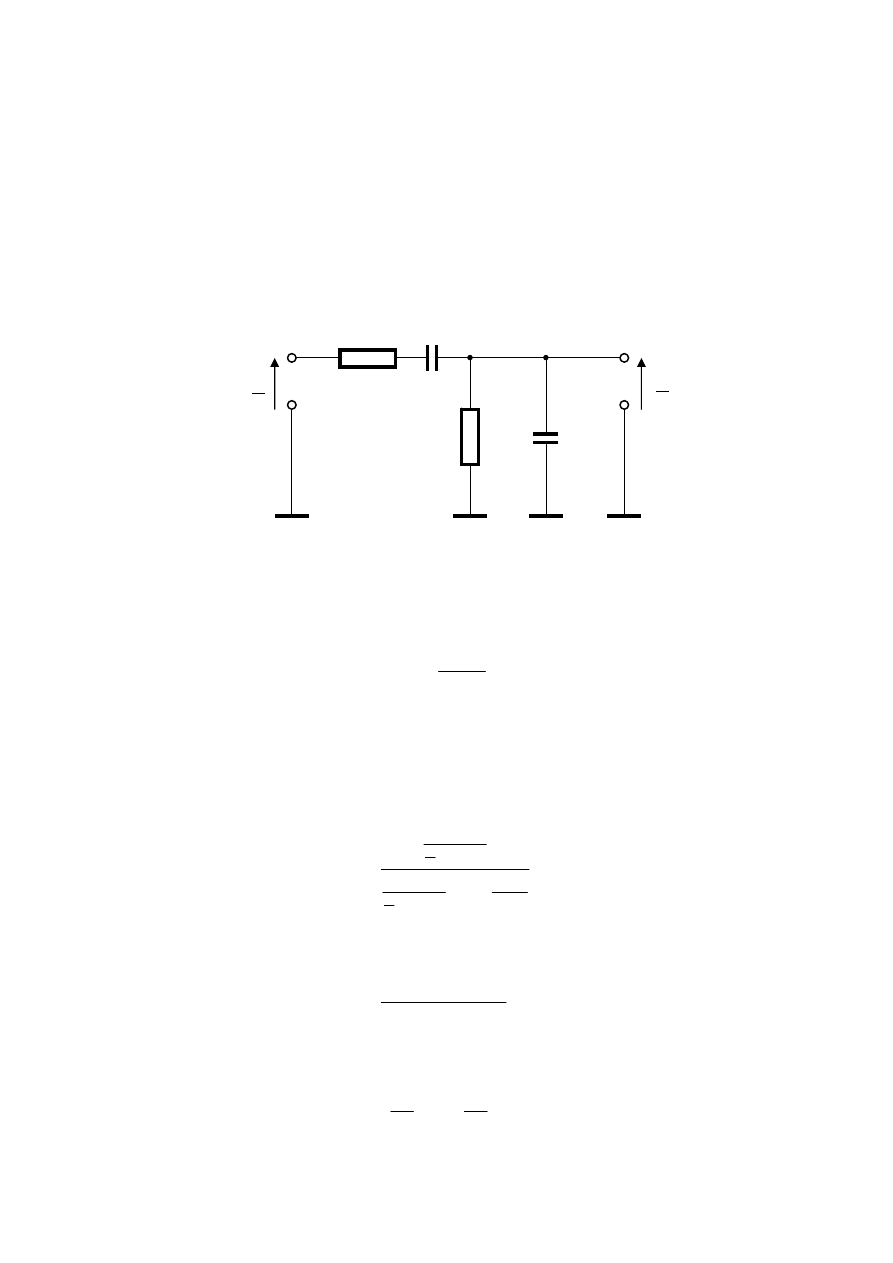
Filtr pasmowy
Przy szeregowym połączeniu filtra dolnoprzepustowego i górnoprzepustowego
otrzymuje się filtr pasmowy. Napięcie wyjściowe filtra pasmowego jest równe zero dla
dużych i małych częstotliwości. Rys. 7 przedstawia układ filtra pasmowego.
Częstotliwość rezonansowa
RC
2π
1
f
0
.
Obliczamy teraz wartość napięcia wyjściowego i przesunięcie fazowe przy średnich
częstotliwościach. Dla nieobciążonego dzielnika mamy następującą zależność w
zapisie zespolonym
1
R
1
R
1
2
U
C
jω
1
R
C
jω
1
C
jω
1
U
stąd
1
2
2
U
RC
j
)
RC
j
(
RC
j
U
(6)
Dla uproszczenia rachunku wprowadzimy oznaczenia
0
1
RC
i
0
Rys. 7. Filtr pasmowy.
U
2
U
1
C
R
C
R
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
10
Ponieważ
RC
otrzymujemy
1
j
3
j
j
)
1
j
(
U
U
2
2
2
1
2
2
2
2
2
2
1
2
2
1
)
1
(
9
U
U
U
U
(7)
Napięcie wyjściowe ma maksymalną wartość dla
= 1, tj. dla
RC
1
0
.
Dla częstotliwości rezonansowej mamy
1
2
U
3
1
U
, a przesunięcie fazy jest równe zero.
Przesunięcie fazowe obliczamy z zależności (7) otrzymując:
3
1
tg
arc
;
3
1
)
(
tg
2
2
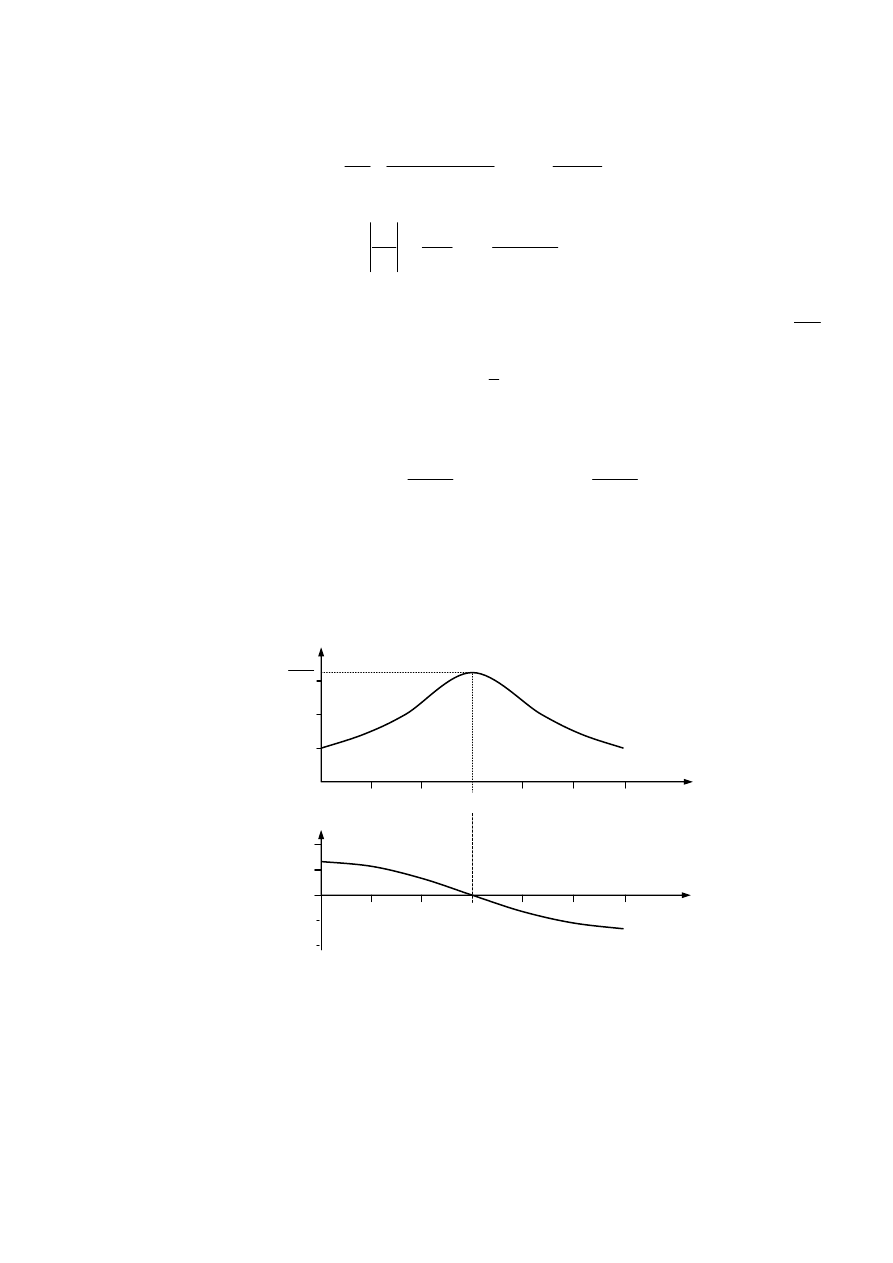
Charakterystyki, częstotliwościowa i fazowa są przedstawione na rys.8.
0,1 0,2 0,5 1 2 5 10
1
2
U
U
0,1 0,2 0,5 1 2 5 10
90
45
0
-45
-90
Rys.8. Charakterystyki częstotliwościowe filtra pasmowego.
a) wzmocnienie,
b) przesunięcie fazowe
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
11
C) CZĘŚĆ EKSPERYMENTALNA
1. Pomiaru charakterystyki amplitudowej dokonuje się odczytując wskazania
woltomierza V
2
dołączonego do wyjścia badanego filtra RC zmieniając częstotliwość
generatora sinusoidalnego z wybranego zbioru F. Sygnał wejściowy z tego
generatora należy utrzymywać na stałym poziomie.
Transmitancję układu oblicza się wg równania (8)
dB
U
U
lg
20
(f)
k
1
2
u
(8)
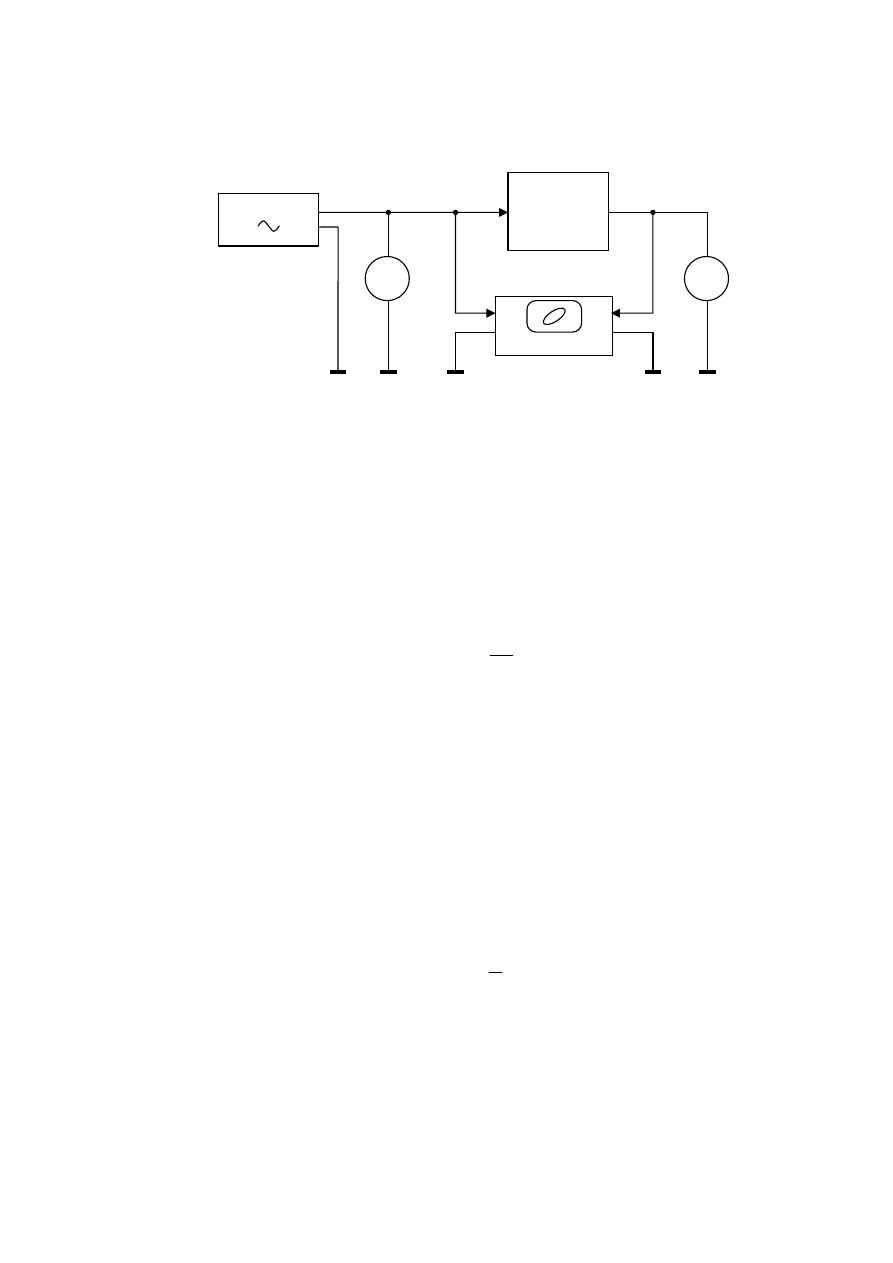
2. Pomiaru charakterystyki fazowej dokonuje się przez określenie przesunięcia
fazowego pomiędzy U
1
= const. a U
2
. W układzie pomiarowym (rys. 9) wykorzystuje
się do pomiaru przesunięcia fazowego metodę oscyloskopową.
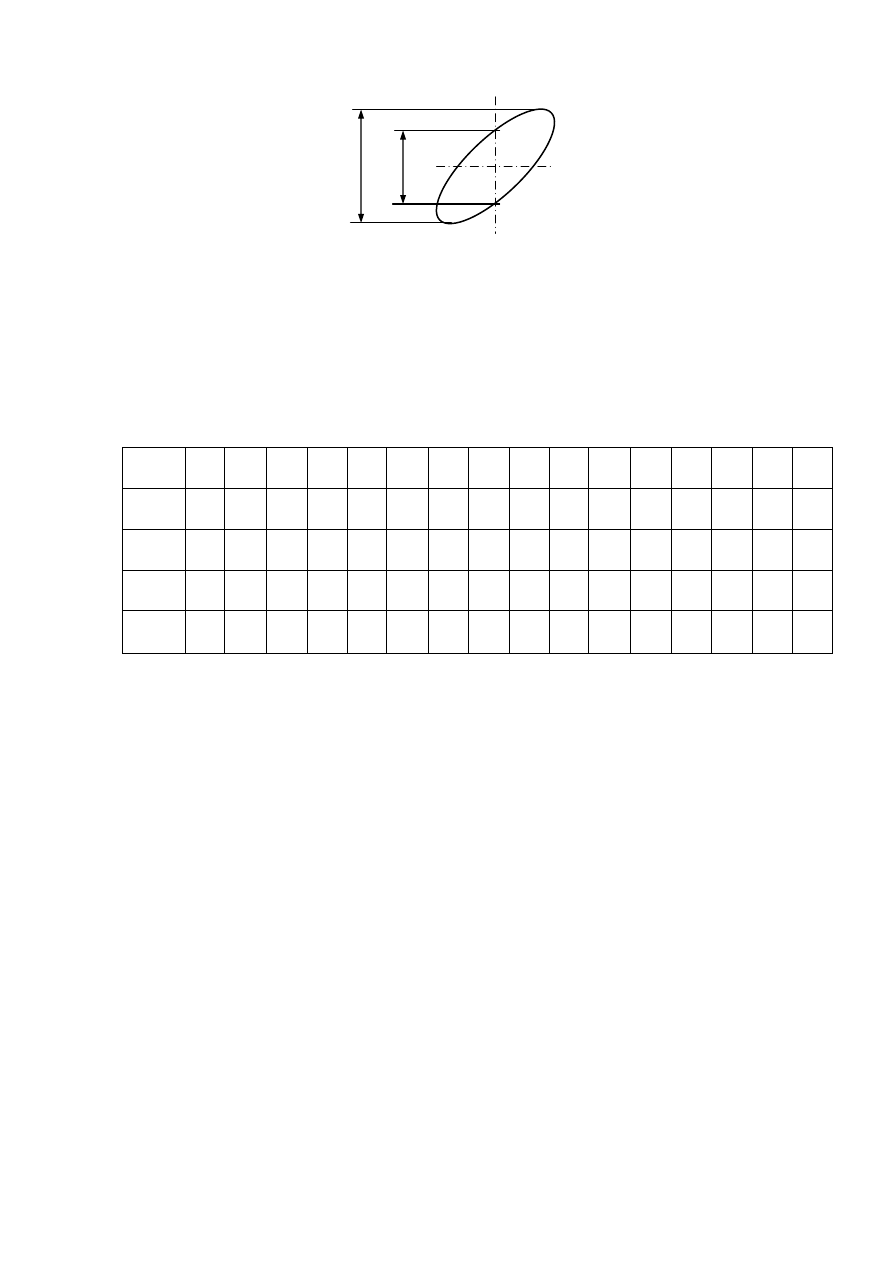
Bardzo popularną metodą pomiaru kąta fazowego jest pomiar parametrów elipsy
utworzonej na ekranie przez sterowanie jednym przebiegiem toru X, a drugim toru Y
oscyloskopu. Kąt fazowy oblicza się za pomocą tablic funkcji sinus ze wzoru (9).
b
a
sin
arc
(9)
Interpretację graficzną przedstawia rys. 10.
BADANY
UKŁAD
OSCYLOSKOP
V
1
V
2
GENERATOR
U
1
WE X
WE Y
U
2
Rys. 9. Schemat stanowiska do pomiaru charakterystyk częstotliwościowych.
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
12
Wyniki pomiarów z punktów 1 i 2 zapisać w tabeli pomiarowej.
U
1
= const.
Tabela pomiarowa
f [Hz]
U
2
[V]
a
b
3. Dokonać pomiarów charakterystyki amplitudowej i fazowej dla filtra
dolnoprzepustowego w następujących konfiguracjach parametrów:
a)
R = 0,1 MΩ
C = 47 nF
R = 47 kΩ
C = 47 nF
R = 20 kΩ
C = 47 nF
R = 10 kΩ
C = 47 nF
b)
R = 20 kΩ
C = 10 nF
R = 20 kΩ
C = 47 nF
R = 20 kΩ
C = 0,1 μF
R = 20 kΩ
C = C
1
b
a
Rys.10. Pomiar kąta fazowego za pomocą elipsy.

Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
13
c)
R = 10 kΩ
C = 10 nF
R = 10 kΩ
C = 47 nF
R = 10 kΩ
C = 0,1 μF
R = 10 kΩ
C = C
2
Na wspólnym wykresie narysować przebiegi:
K
u
= f(lgf)
Φ = f(lgf)
odpowiednio dla punktu a, b i c.
Na podstawie dokonanych pomiarów wyznaczyć (z zależności 5) wartość C
1
i C
2
dla co drugiej pomierzonej wartości częstotliwości i obliczyć wartości średnie C
1
i C
2
.
Jak
wpływa zmiana wartości: odpowiednio R i C na zachowanie się filtra ?
4. Dokonać pomiarów charakterystyki amplitudowej i fazowej dla filtra
górnoprzepustowego w następujących konfiguracjach parametrów:
a)
C = 47 nF
R = 20 kΩ
C = 47 nF
R = 10 kΩ
C = 47 nF
R = R
1
b)
C = 10 nF
R = 0,1 MΩ
C = 10 nF
R = 20 kΩ
C = 10 nF
R = 10 kΩ
C = 10 nF
R = R
2
c)
C = 10 nF
R = 10 kΩ
C = 47 nF
R = 10 kΩ
C = 0,1 μF
R = 10 kΩ
C = C
2
R = 10 kΩ

Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
14
d)
C = 10 nF
R = 20 kΩ
C = 47 nF
R = 20 kΩ
C = 0,1 μF
R = 20 kΩ
C = C
1
R = 20 kΩ
Na wspólnym wykresie narysować przebiegi:
k
u
= f(lgf)
Φ = f(lgf)
odpowiednio dla punktu a, b, c i d.
Na podstawie dokonanych pomiarów wyznaczyć (z zależności 1) wartość C
1
i C
2
oraz R
1
i R
2
dla co drugiej pomierzonej wartości częstotliwości i obliczyć ich
wartości średnie.
Jak
wpływa zmiana wartości: odpowiednio R i C na zachowanie się filtra ?
Porównać otrzymane wartości C
1
i C
2
wyznaczone odpowiednio dla filtra
dolnoprzepustowego i górnoprzepustowego.
5. Dokonać pomiarów charakterystyk częstotliwościowych dla filtra pasmowego w
następujących konfiguracjach parametrów:
a)
R = 47 kΩ
b)
R = 47 kΩ
C = 47 nF
C = 10 nF
c)
R = 10 kΩ
d)
R = 10 kΩ
C = 47 nF
C = 10 nF
Na wspólnym wykresie narysować przebiegi:
U
2
/U
1
= f(Ω)
Φ = f(Ω)
odpowiednio dla punktów : (a+b), (c+d), (a+c), (b+d).
Jak
wpływa zmiana wartości: odpowiednio R i C na zachowanie się filtra ?
Opracowali: dr inż. Jerzy Chmiel, dr inż. Adam Rosiński, inż. Andrzej Szmigiel
Wydział Transportu PW. Warszawa 2014.
15
D) Wyposażenie
Elementy układu:
Rezystor R = 0,1 M
............................................................................................ szt. 1
Rezystor R = 47
................................................................................................ szt. 2
Rezystor R = 20 k
.............................................................................................. szt. 1
Rezystor R = 10 k
.............................................................................................. szt. 2
Rezystor R
1
= .... k
(wartość do obliczenia przez studenta) ............................... szt. 1
Rezystor R
2
= .... k
(wartość do obliczenia przez studenta) ............................... szt. 1
Kondensator C = 0,1 μF ....................................................................................... szt. 1
Kondensator C = 47 nF ......................................................................................... szt. 2
Kondensator C = 10 nF ......................................................................................... szt. 2
Kondensator C
1
= .... F (wartość do obliczenia przez studenta) ........................... szt. 1
Kondensator C
2
= .... F (wartość do obliczenia przez studenta) ........................... szt. 1
Sprzęt pomiarowy:
Cyfrowy miernik uniwersalny ................................................................................ szt. 2
Oscyloskop dwukanałowy ..................................................................................... szt. 1
Źródło zasilania:
Generator funkcyjny .............................................................................................. szt. 1
Akcesoria:
Płyta montażowa .................................................................................................. szt. 1
Komplet przewodów ............................................................................................. szt. 1
E) Literatura
1. Marcyniuk Andrzej: ,,Podstawy miernictwa”. Wydaw. Politechn. Śląskiej, 2002
2. Tietze, Schenk: ,,Układy półprzewodnikowe”. Wydaw. Nauk. –Techn., 1996
F) Zagadnienia do przygotowania
1. Narysować schemat ideowy, charakterystyki częstotliwościowe i przesunięcia fazowego dla
filtru dolnoprzepustowego.
2. Narysować schemat ideowy, charakterystyki częstotliwościowe i przesunięcia fazowego dla
filtru górnoprzepustowego.
3. Narysować schemat ideowy, charakterystyki częstotliwościowe i przesunięcia fazowego dla
filtru środkowoprzepustowego.
4. Zdefiniować pojęcie transmitancji i podać wyrażenia określające transmitancje filtrów
dolnoprzepustowego, górnoprzepustowego i środkowoprzepustowego.
5. Narysować przebieg odpowiedzi filtru dolnoprzepustowego na wejściowy przebieg
prostokątny. Uzasadnić kształt przebiegu wyjściowego. Jaką funkcję matematyczną ten układ
realizuje ?
6. Narysować przebieg odpowiedzi filtru górnoprzepustowego na wejściowy przebieg
prostokątny. Uzasadnić kształt przebiegu wyjściowego. Jaką funkcję matematyczną ten układ
realizuje ?
Wyszukiwarka
Podobne podstrony:
Cw 1 Czworniki bierne 2 id 1223 Nieznany
cw PAiTS 05 id 122324 Nieznany
CW 8 pytania kontrolne id 12215 Nieznany
Cw 29 szablon id 97632 Nieznany
cw PRI harmonogram id 122354 Nieznany
cw 03 formularz id 121361 Nieznany
Cw 25 Zaklocenia id 122416 Nieznany
cw 05 instrukcja id 121376 Nieznany
cw 15 formularz id 121556 Nieznany
normy do cw I PN B 19301 id 787 Nieznany
Cw 24 cw070 id 648300 Nieznany
cad 1 I Cw 14 2013 id 107655 Nieznany
Cw 2 Biochemia OS id 121642 Nieznany
cw 05 formularz id 121375 Nieznany
Cw 29 zaliczone id 121743 Nieznany
Cw 13 szablon id 97569 Nieznany
cw jednostka ppm id 122227 Nieznany
cw PAiTS 04 id 122323 Nieznany
więcej podobnych podstron