
W
W
y
y
k
k
ł
ł
a
a
d
d
6
6
:
:
I
I
n
n
t
t
e
e
r
r
p
p
o
o
l
l
a
a
c
c
j
j
a
a
f
f
u
u
n
n
k
k
c
c
j
j
a
a
m
m
i
i
s
s
k
k
l
l
e
e
j
j
a
a
n
n
y
y
m
m
i
i
(
(
s
s
p
p
l
l
a
a
j
j
n
n
y
y
)
)

W tym wykładzie omówimy problem interpolacji przy pomocy tzw. funkcji sklejanych,
zwanych też (żargonowo) splajnami. W przeciwieństwie do metod interpolacyjnych
opisanych w Wykładzie nr 1, gdzie stosowaliśmy jeden globalny wielomian dla całego
przedziału interpolacji, w metodzie splajnów stosowane są funkcje zdefiniowane jako
wielomiany niskiego stopnia osobno dla każdego odcinka pomiędzy sąsiednimi węzłami
interpolacyjnymi. Te lokalne wielomiany są jednak tak dobrane, aby – oprócz warunków
interpolacji – spełniać warunki sklejenia w taki sposób, aby cały splajn był funkcją o
odpowiedniej regularności. Skoncentrujemy się przede wszystkim na zagadnieniu interpolacji
za pomocą splajnu kubicznego, tj. funkcji ciągłej wraz z pochodnymi do rzędu drugiego
włącznie i zbudowanej z wielomianów 3-ego stopnia.
Należy wspomnieć, że funkcje sklejane (i ich daleko idące uogólnienia), maja wiele
zastosowań praktycznych, w szczególności stanowią podstawowe narzędzie
współczesnego projektowanie geometrycznego (CAD).

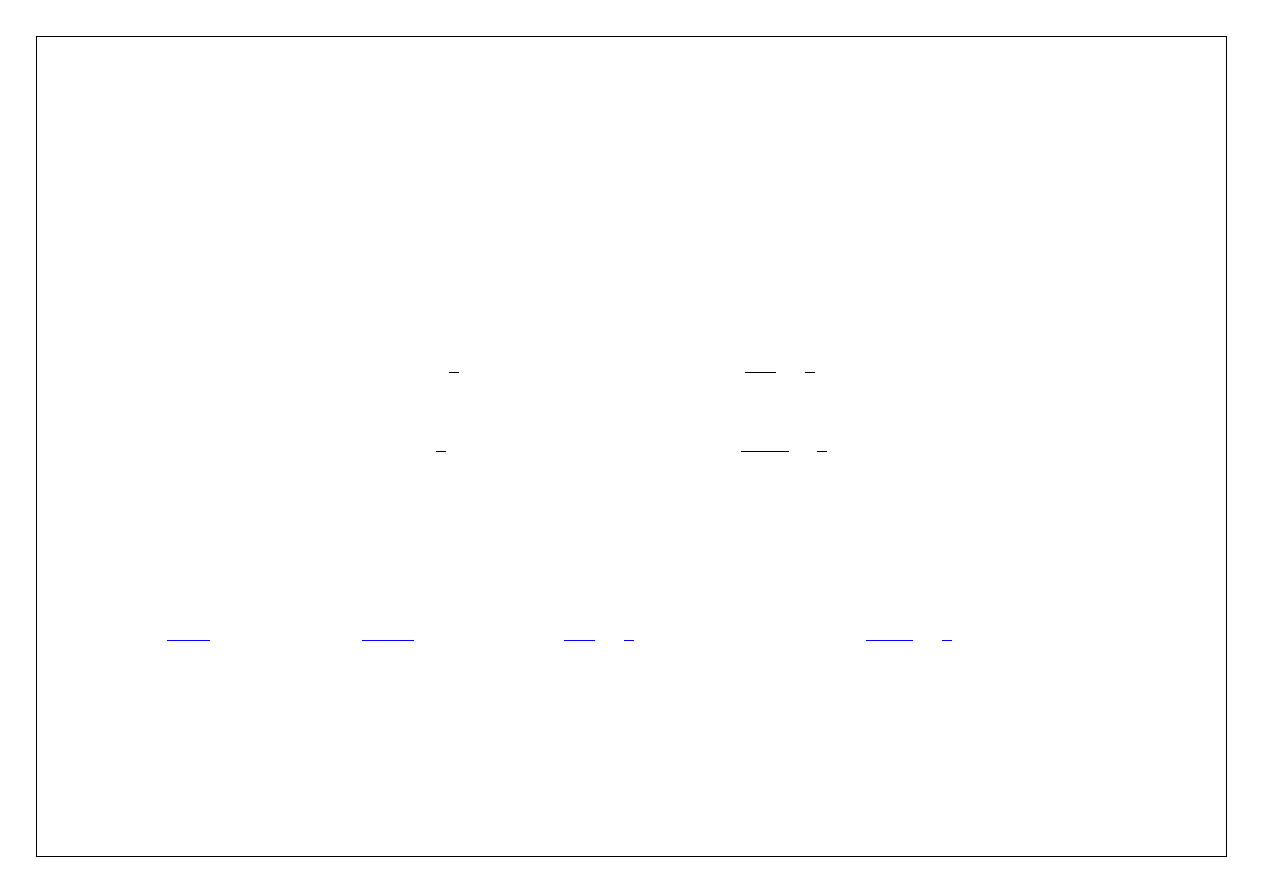
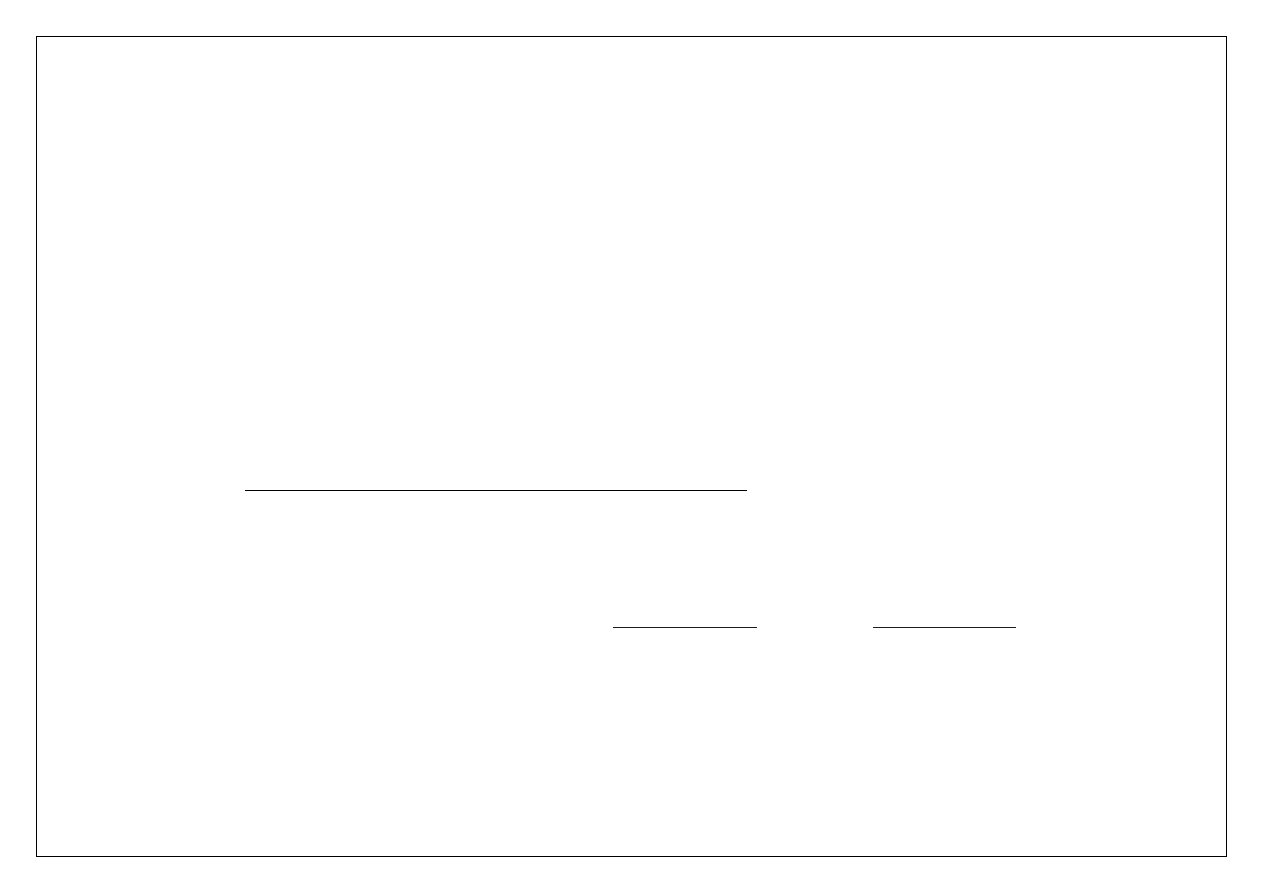
Rozważmy układ
n
węzłów interpolacyjnych
0
0
1
1
1
1
{( ,
), ( ,
),...,(
,
)}
n
n
x y
x y
x
y
, gdzie
0
1
1
..
n
a
x
x
x
b
.
Splajnem kubicznym C = C(x) nazywamy funkcje określoną na przedziale [a,b] i taką, że:
1.
2
( )
([ , ])
C x
C
a b
, tj. jest ona ciągła wraz z pierwszą i drugą pochodną w [a,b].
2.
1
3
2
,3
,2
,1
,0
[
,
]
( ) :
( )
k
k
k
k
k
k
k
x x
C x
C x
a x
a x
a x
a
,
0,..,
2
k
n
, tj. wewnątrz każdego
podprzedziału funkcja ta jest pewnym wielomianem 3-ego stopnia.
3. Dla każdego węzła funkcja C(x) spełnia warunki interpolacji tj.
(
)
,
0,..,
1
k
k
C x
y
k
n
.

Z powyższego wynika, że wielomiany lokalne muszą spełniać warunki interpolacyjne
(
)
,
0,..,
1
k
k
k
C x
y
k
n
,
oraz warunki sklejenia zapewniające założoną regularność funkcji C, a mianowicie
1
1
1
(
)
(
)
(
)
(
)
(
)
(
)
k
k
k
k
k
k
k
k
k
k
k
k
C
x
C x
C
x
C x
C
x
C x
dla
1,..,
2
k
n
(tj. w węzłach wewnętrznych).
Zauważmy, że liczba postawionych warunków jest równa 4n - 6. Całkowita liczba nieznanych
współczynników lokalnych wielomianów jest natomiast równa 4(n - 1) = 4
n
- 4. Zatem,
problem wyznaczenia splajna kubicznego jest niedookreślony.
Potrzebujemy nałożyć dwa dodatkowe warunki tak, aby zagadnienie wyznaczenia
funkcji C miało jednoznaczne rozwiązanie.
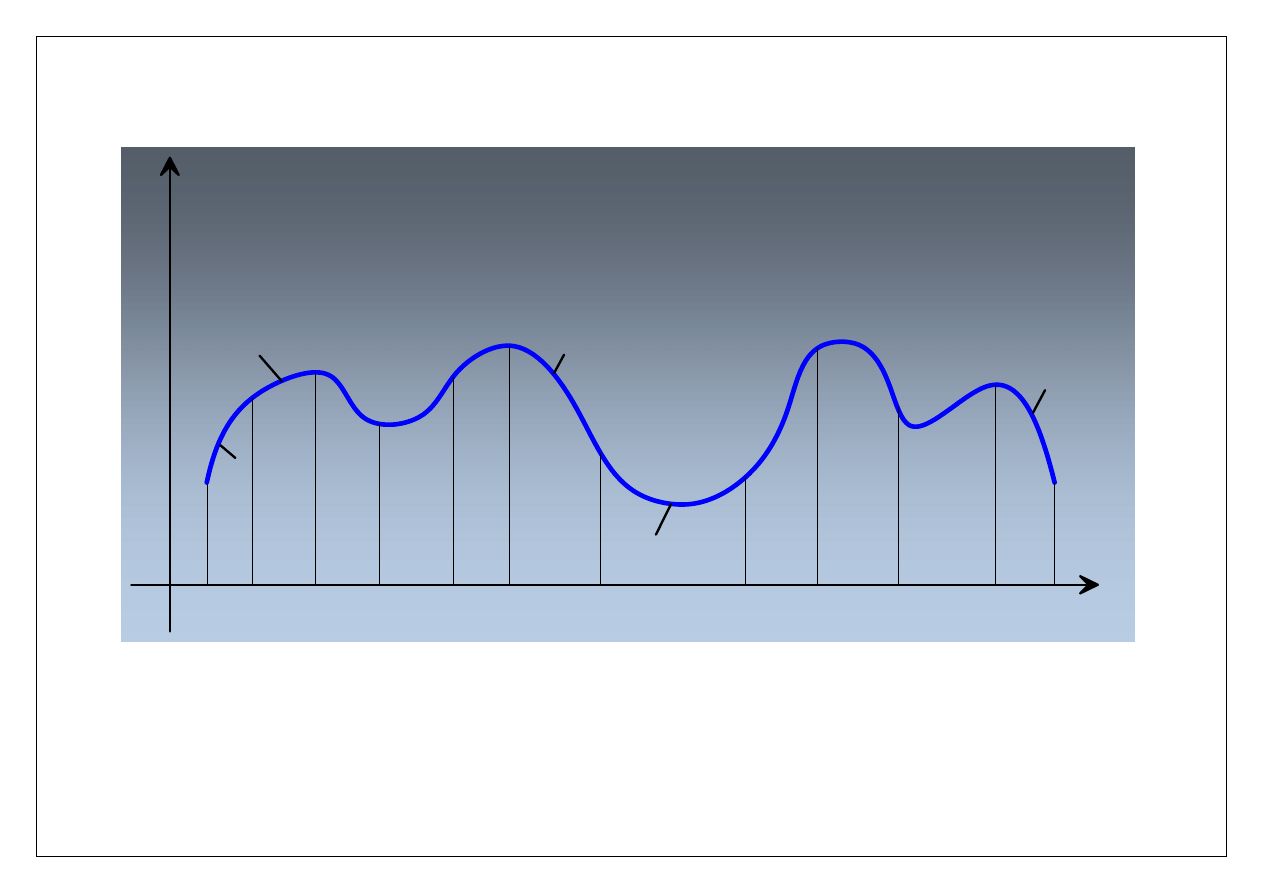
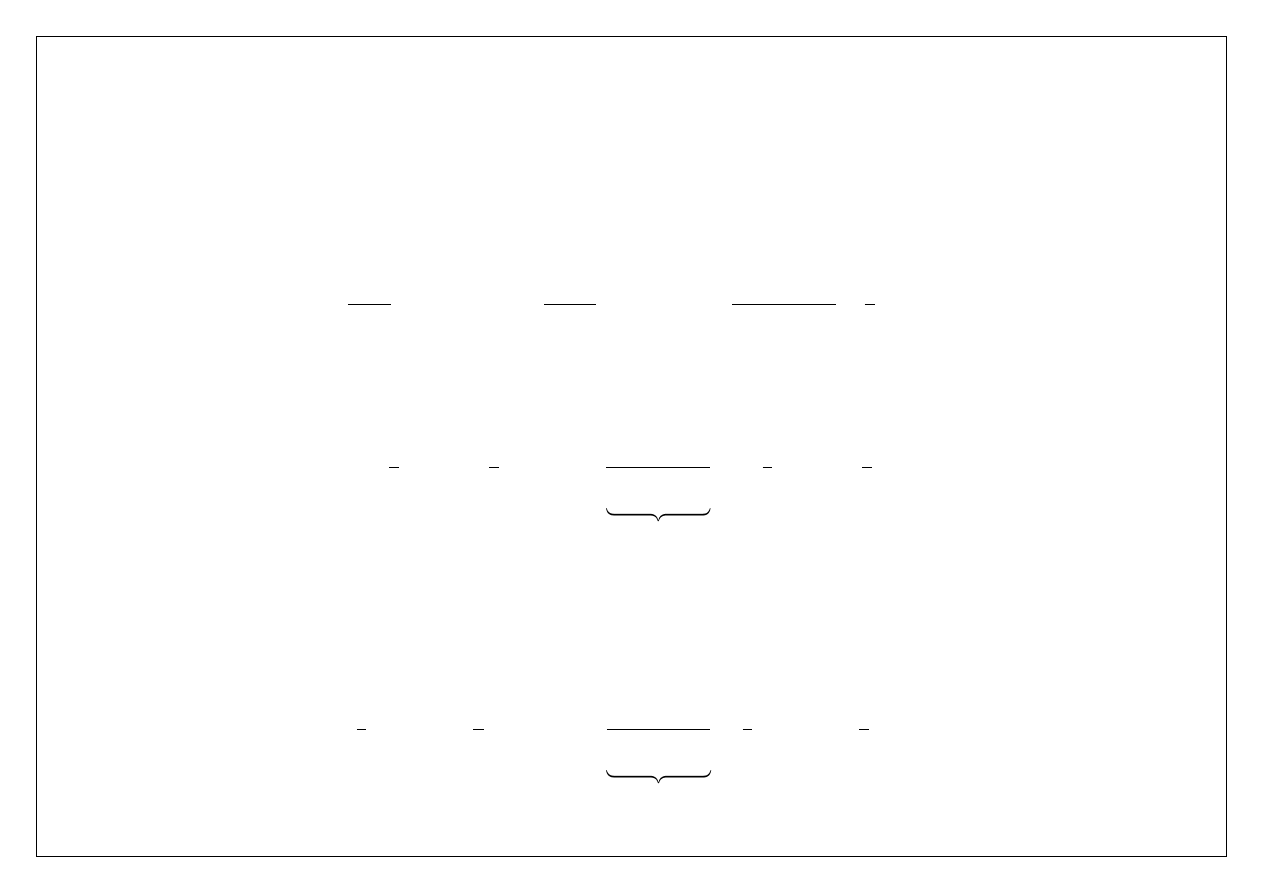
Splajn kubiczny
x
0
x
1
x
2
x
k
x
k-1
x
k+1
x
n-2
x
n-1
y
0
y
1
y
2
y
k-1
y
k
y
k+1
y
n-2
y
n-1
C
1
(x)
C
0
(x)
C
k-1
(x)
C
k
(x)
C
n-2
(x)
y
x

Zwykle (ale nie zawsze) warunki dodatkowe mają formę warunków „brzegowych”
nałożonych na pierwszą lub drugą pochodną funkcji C, a mianowicie:
(
0
(
)
C x
lub
0
(
)
C x
) i (
1
(
)
n
C x
lub
1
(
)
n
C x
)
W powyższych warunkach liczby α, β, γ, i δ są oczywiście zadane.
Ważnym przypadkiem szczególnym jest tzw. splajn naturalny. Jest to taki splajn kubicznym
który spełnia warunki postaci
0
(
)
0
C x
,
1
(
)
0
n
C x
Splajn naturalny posiada interesującą własność. Okazuje się, że spośród wszystkich funkcji
ciągłych wraz z dwiema pierwszymi pochodnymi i interpolujących zadany układ węzłów
splajn naturalny ma najmniejszą wartość całki z kwadratu drugiej pochodnej na
przedziale interpolacji [a,b], tj.
2
( )
min
b
a
C x
dx
Dokładniej, mamy następujące
TWIERDZENIE: Niech
2
0 ,
1
( [
] )
n
f
C
x
x
będzie dowolna. Załóżmy, że
( )
0
C a
i
( )
0
C b
lub
( )
( )
C a
f a
i
( )
( )
C b
f b
. Wówczas
2
2
[
( )]
[
( )]
b
b
a
a
C x
dx
f
x
dx
Dowód:
0
0
( )[
( )
( )]
( )[
( )
( )]
( )[
( )
( )]
( )[
( )
( )]
( )[
( )
( )]
( )[
( )
( )]
przez
czesci
z zal
b
b
x b
x a
ozenia
z zalozenia
a
a
b
a
C x
f
x
C x dx
C x
f x
C x
C
x
f x
C x dx
C b
f b
C b
C a
f a
C a
C
x
f x
C x dx
1
1
,3
1
1
1
,3
0
0
6
0
(
)
(
),
0
1
,3
,1 ..
0
, ,
( ) [
( )
( )]
6
[
( )
( )]
6
[ ( )
( )]
0
k
k
k
k
k
k
k
k
k
a
con
n
n
x
x
k
k
x
x
k
k
n
x
st
bo C x
f x
x
k
n
x
k
x
k
C x
f x
C x dx
a
f x
C x dx
a
f x
C x
Otrzymaliśmy równość
2
( )
( )
[
( )]
b
b
a
a
C x f
x dx
C x
dx
.
Dalej mamy
2
2
2
2
2
2
[
( )]
0
[
( )
( )]
[
( )]
2
( )
( )
[
( )]
[
( )]
[
( )]
b
a
b
b
b
b
a
a
a
a
b
b
a
a
C x
dx
f
x
C x
dx
f
x
dx
f
x C x dx
C x
dx
f
x
dx
C x
dx
czyli
2
2
[
( )]
[
( )]
b
b
a
a
f
x
dx
C x
dx
. Koniec dowodu.
Pozostaje kwestia jak w efektywny sposób wyznaczyć (skonstruować) splajn kubiczny dla
zadanego układu węzłów. W teorii, moglibyśmy zbudować i rozwiązać układ równań
(liniowych) dla nieznanych współczynników lokalnych wielomianów C
k
(k = 0,1,..,n-2).
Układ taki zawierałby 4n-4 równań, a macierz współczynników miałaby dość „paskudną”
strukturę.
Okazuje się (jak zwykle?), że istnieje alternatywna metoda inteligentna!
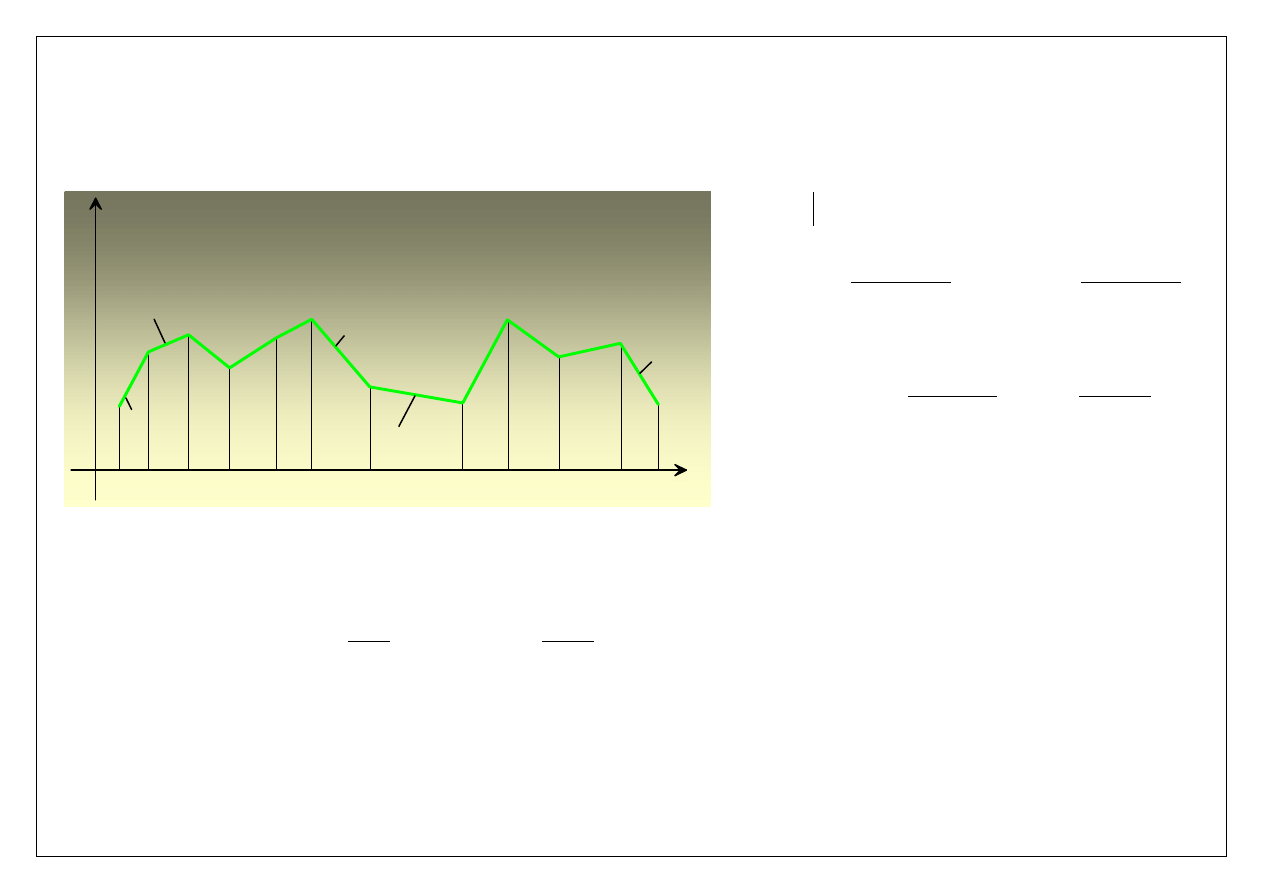
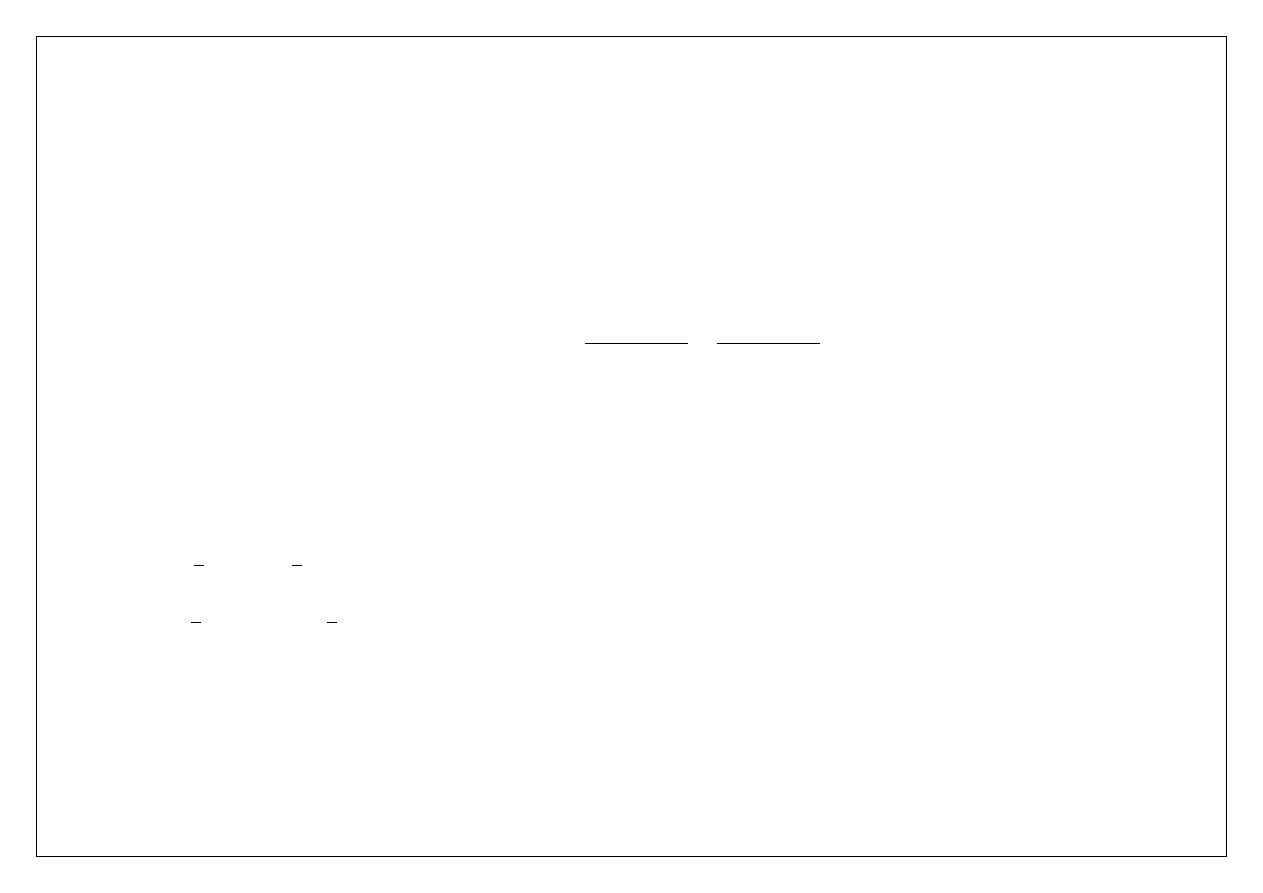
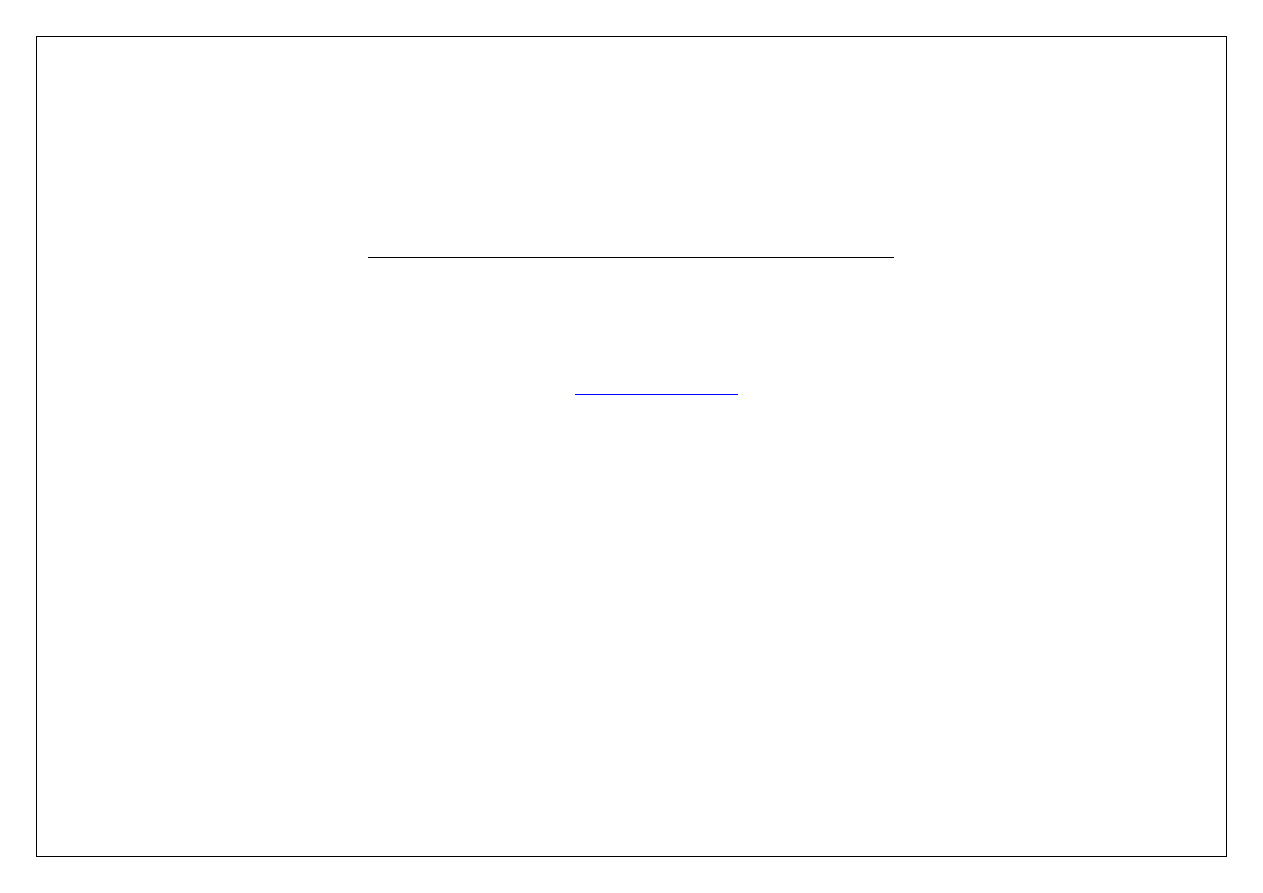
Zacznijmy od spostrzeżenia, że druga pochodna poszukiwanej funkcji sklejanej C jest funkcją
kawałkami liniową (mówimy też – jest splajnem liniowym). Można ją zapisać następująco:
,
1
[
]
1
1
1
1
( )
( )
(
)
(
)
k
k
k
x x
k
k
x
k
x
k
k
k
k
k
C x
C x
x
x
x
x
C x
C x
x
x
x
x
lub
1
1
( )
k
k
k
k
k
k
k
x
x
x
x
C x
m
m
h
h
gdzie
1
(
) ,
k
k
k
k
k
m
C x
h
x
x
Całkując dwukrotnie powyższą formułę otrzymamy postać lokalnego wielomianu
k
C
3
3
1
1
1
( )
(
)
(
)
(
)
(
)
6
6
k
k
k
k
k
k
k
k
k
k
k
m
m
C x
x
x
x
x
p x
x
q x
x
h
h
przy czym symbole
p
k
i
q
k
oznaczają stałe całkowania. Czytelnik będzie uprzejmy upewnić
się, że druga pochodna funkcji
k
C ma istotnie odpowiednią postać.
x
0
x
1
x
2
x
k
x
k-1
x
k+1
x
n-2
x
n-1
y
0
y
1
y
2
y
k-1
y
k
y
k+1
y
n-2
y
n-1
y
x
L
0
(x)
L
1
(x)
L
k-1
(x)
L
k
(x)
L
n-2
(x)
Póki co, stałe całkowania były dowolne. Teraz dobierzemy je tak, aby spełnić warunki
interpolacji
1
1
(
)
,
(
)
k
k
k
k
k
k
C x
y
C x
y
Otrzymujemy wartości stałych
p
k
i
q
k
2
1
1
6
6
k
k
k
k
k
k
k
k
k
k
y
y
m h
p h
p
m h
h
2
1
1
1
6
6
1
1
1
k
k
k
k
k
k
k
k
k
k
y
y
m h
q h
q
m h
h
i w konsekwencji ostateczna postać lokalnego wielomianu wyraża się formułą
3
3
1
1
1
1
6
6
1
1
1
( )
(
)
(
)
(
)
(
)
6
6
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
m
m
y
y
C x
x
x
x
x
m h
x
x
m h
x
x
h
h
h
h
przy czym indeks k przyjmuje wartości od 0 do n-2.
Pozostało obliczyć wartości drugiej pochodnej splajnu w węzłach, czyli wielkości
0
1
1
,
,...,
n
m m
m
.
Zauważmy, że nie wykorzystaliśmy jeszcze warunku „dopasowania” pierwszej pochodnej
sąsiadujących wielomianów lokalnych. Różniczkując otrzymaną wyżej formułę dla C
k
mamy
2
2
1
1
1
6
1
1
( )
(
)
(
)
(
)
2
2
k
k
k
k
k
k
k
k
k
k
k
k
k
m
m
y
y
C x
x
x
x
x
m
m h
h
h
h
Rozważmy węzeł
x
k
. Z powyższego wzoru wynika dla
k
x
x
, że
1
1
1
1
1
3
6
3
6
1
1
(
)
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
d
y
y
C x
m h
m h
m h
m h
d
h
Wartość pierwszej pochodnej wielomianu C
k-1
w węźle
x
k
otrzymamy następująco: najpierw
w ogólnej formule dla 1-szej pochodnej wielomianu C
k
podmienimy formalnie k na k-1, a
następnie podstawimy
k
x
x
. Oto rezultat (sprawdzić!)
1
1
1
1
1
1
3
6
3
6
1
1
1
1
1
1
1
1
1
(
)
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
d
y
y
C
x
m h
m h
m h
m h
d
h
Z warunków ciągłości 1-szej pochodnej w węzłach mamy
1
(
)
(
)
k
k
k
k
C
x
C x
, co po
podstawieniu otrzymanych wzorów i prostych przekształceniach prowadzi do następującego
układu równań dla wielkości
0
1
1
,
,...,
n
m m
m
1
1
1
1
2(
)
,
1,2,..,
2
k
k
k
k
k
k
k
k
h m
h
h m
h m
u
k
n
gdzie oznaczyliśmy
1
1
1
1
6(
)
6
k
k
k
k
k
k
k
k
k
y
y
y
y
u
d
d
h
h
.
Wiemy już, że do wyznaczenia funkcji sklejanej C potrzebujemy dwóch dodatkowych
warunków. Jeśli zdecydujemy się na określenie wartości pierwszej pochodnej w węzłach
skrajnych to warunki te przyjmą postać
1
1
3
6
0
0
0
0
1
0
0
0
0
1
0
(
)
2
6(
)
C x
h m
h m
d
h m
h m
d
1
1
3
6
1
2
1
2
2
2
2
2
2
1
2
(
)
2
6(
)
n
n
n
n
n
n
n
n
n
n
n
C x
h
m
h
m
d
h
m
h
m
d
Jeśli natomiast określimy wartości brzegowe drugiej pochodnej to dodatkowe równania są
bardzo proste, a mianowicie
0
m
i
1
n
m
. W szczególności, jeśli
0
to
otrzymamy splajn kubiczny naturalny.
Podsumowując, kompletny układ równań liniowych dla wartości drugiej pochodnej splajna
kubicznego w węzłach może być zapisany następująco:
0
0
0
0
1
0
1
1
1
1
1
2
2
2
1
2
2
6(
)
,
0
2(
)
,
1,..,
2
2
6(
) ,
1
k
k
k
k
k
k
k
k
n
n
n
n
n
n
m
h m
h m
d
k
h
m
h
h m
h m
u
k
n
m
h
m
h
m
d
k
n
lub
lub
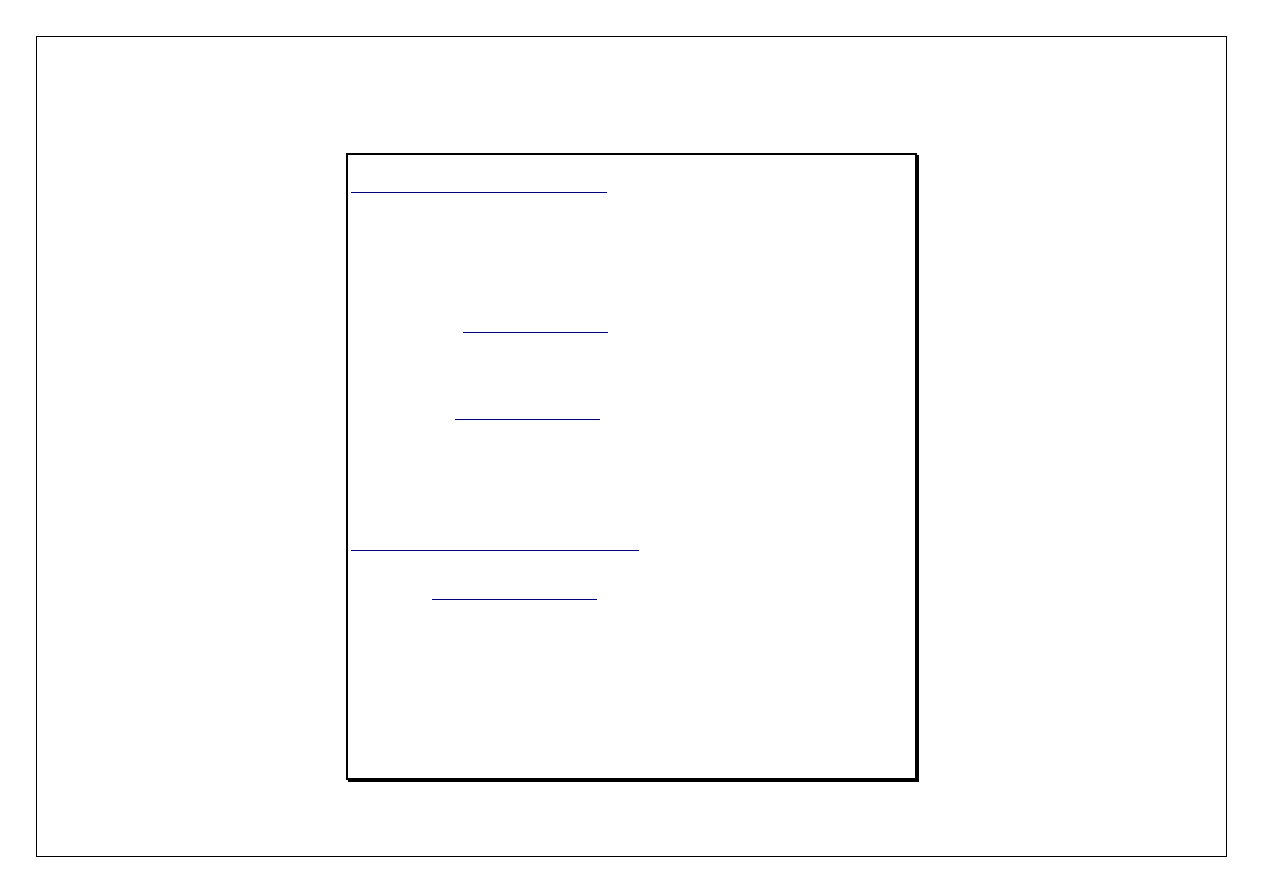
W notacji macierzowo-wektorowej:
Tm r
. Zauważmy, że macierz
T
jest trójdiagonalna.
Niezerowe elementy tej macierzy można zapisać jako elementy trzech wektorów a,b and c.
0
0
1
1
2
2
2
1
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
k
k
k
n
n
n
n
n
c
b
a
c
b
a
c
b
a
c
b
a
c
T

Wartości zapisane w tych wektorach zależą od przyjętego wariantu „warunków
brzegowych” i przedstawiają się następująco:
0
1
1
1
2
0
,
1,..,
2
0
(
)
k
k
n
n
n
nie uzyw
a
a
h
k
n
a
lub
h
y
a
an
0
0
0
1
0
,
1,..,
2
(
)
0
k
k
n
l
b
b
h
b
h
nie uzuwan
u
b
y
k
n
b
0
0
0
1
1
1
2
1
2
2(
) ,
1,..,
2
1
2
k
k
k
n
n
n
lub
l
c
c
h
c
h
h
k
n
c
c
ub
h
Do efektywnego rozwiązania układu liniowego z macierzą trójdiagonalną stosujemy
specjalny wariant metody eliminacji Gaussa zwany algorytmem przeganiania (Thomasa).
Przedstawimy ten algorytm zakładając, że rozwiązywany układ równań ma postać
0
0
0
1
0
1
1
1
2
1
1
1
,
1,..,
2
k
k
k
k
k
k
k
n
n
n
n
n
k
n
c m
b m
r
a m
c m
b m
r
a
m
c
m
r

Metoda przeganiania (algorytm Thomasa)
Rozważmy dwa pierwsze równania układu
0
0
0
1
0
1
0
1
1
1
2
c m
b m
r
a m
c m
b m
r
i załóżmy, że
0
0
c
. Najpierw „normalizujemy” pierwsze równanie dzieląc je przez c
0
,
następnie eliminujemy m
0
metodą przeciwnych współczynników
0
0
0
0
0
0
0
0
1
0
1
1
0
1
1
2
,
/
,
/
b c
r c
a m
c m
b
m
m
m
r
i w końcu sprowadzamy zmodyfikowane drugie równanie do postaci „znormalizowanej”
1
0 1
1
1
2
1
1
0
1
0 1
1
1
0
1
1
1
1
0
1
1
2
1
1
0 1
1
(
)
/ : (
)
,
,
c
a m
b m
r
a
c
a
r
a
b
m
a
a
m
c
c
W trakcie obliczeń pojawiają się dwie pomocnicze wielkości
1
and
1
.
Zauważmy, że nowy zredukowany układ równań z niewiadomymi
1
1
,...,
n
m
m
wygląda „tak
samo” jak oryginalny, tj. ma strukturę 3-diagonalną i pierwsze z równań ma postać 3-
diagonalną i pierwsze równanie ma postać znormalizowaną. Układ ten jest zatem gotowy do
kontunuowania procedury eliminacji kolejnych niewiadomych. Po k krokach procedury
eliminacyjnej dochodzimy do etapu, w którym układ zwiera niewiadome o numerach od k do
n-1. Następny krok polega na eliminacji niewiadomej
m
k
metodą przeciwnych
współczynników. W szczegółach wygląda to następująco
1
1
1
1
1
1
2
1
1
1
1
1
2
1
1
1
1
1
1
1
1
1
1
1
2
1
1
1
/
(
)
,
,
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
k
m
m
a
a
m
c m
b m
r
c
a
m
b m
r
b
r
a
m
m
c
b
a
c
a
Podczas obliczeń pojawia się kolejna para wielkości pomocniczych
1
k
and
1
k
.
Ostatecznie, po n-1 krokach eliminacji proces osiąga ostatnie równanie układu. Ostatni krok
eliminacji przebiega następująco
2
2
1
2
1
1
2
1
1
1
1
2
1
1
1
1
2
1
1
2
1
1
2
1
/
(
)
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
n
m
m
a
a
r
b
m
c
m
c
m
r
c
a
m
r
a
b
Zauważmy, że ostatnie równanie układu zawiera jedynie dwie niewiadome (przedostatnią i
ostatnią), przez co wyniku eliminacji m
n-2
otrzymujemy równanie z tylko jedną niewiadomą
m
n-1
. Zauważmy również, że podczas procesu eliminacji otrzymaliśmy rekursywną formułę
wiążącą dwie niewiadome o kolejnych numerach. Ogólna postać tej formuły wynika z
pierwszego równania (znormalizowanego) zredukowanego układu po k krokach eliminacji, a
mianowicie
1
,
2,
3,...,1,0
k
k
k
k
m
m
k
n
n
W ten sposób wszystkie wyeliminowane wcześniej niewiadome mogą być wyznaczone w
pętli chodzącej wspak.
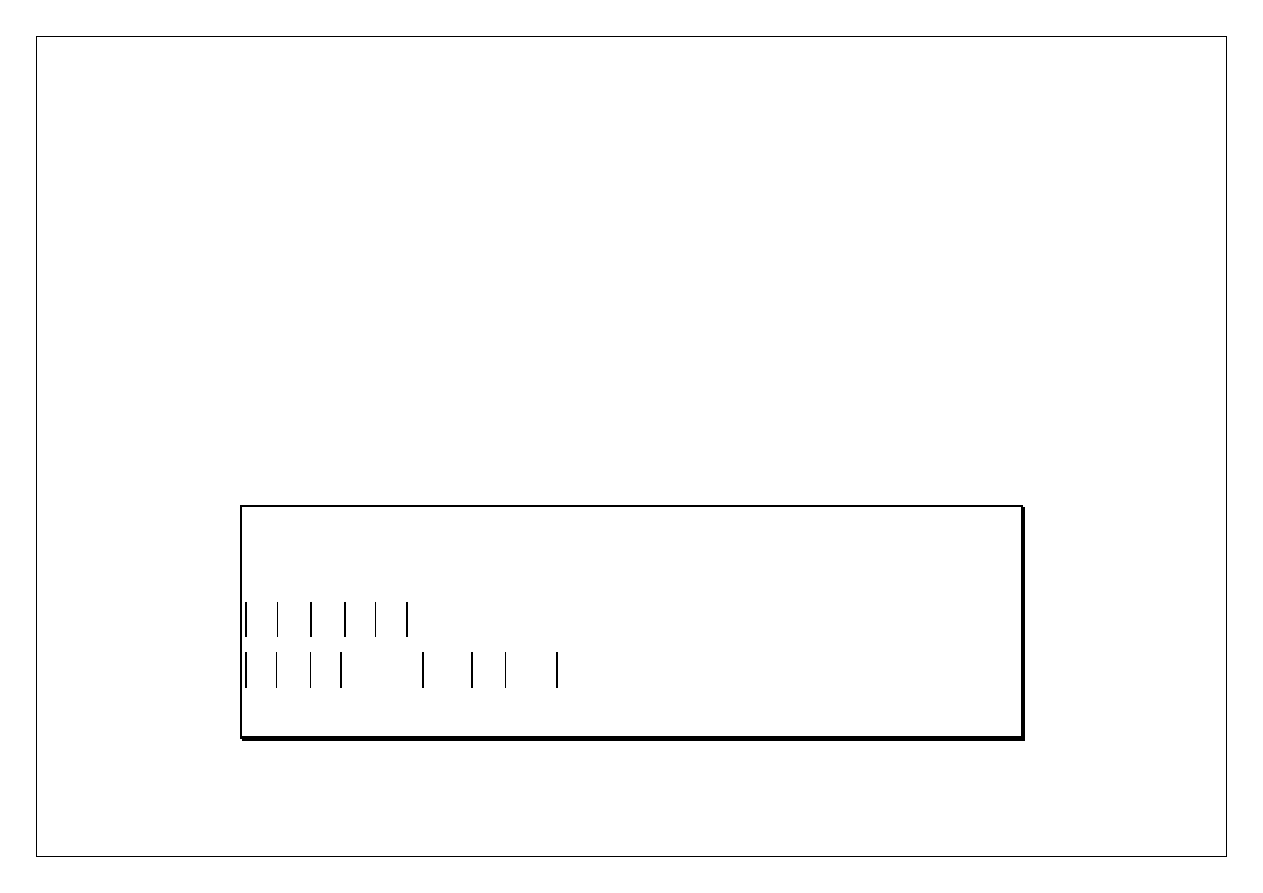
Metodę przeganiania (algorytm Thomasa) można podsumować następująco:
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
2
1
1
1
2
1
1
1 (
)
/
;
/
;
0,..,
3
:
;
;
;
2 (
)
;
2,..,
!
:
!
0
k
k
k
k
k
k
k
k
k
k
k
k
n
n
n
n
n
n
n
k
k
k
k
ETAP
sweep
up
b
c
r
c
for k
n
do
b
c
a
r
a
c
a
end
ETAP
sweep
down
r
a
m
c
a
for k
n
ta petla c
do
m
m
hodzi wst
en
ecz
;
d
UWAGA:
Ponieważ metoda przeganiania jest pewnym wariantem metody eliminacji Gaussa (bez
wyboru elementu głównego – vide Wykład 7), to na macierz trójdiagonalną należy nałożyć
pewne ograniczenia gwarantujące powodzenie obliczeń. Chodzi przede wszystkim o
gwarancję, że wszystkie operacje dzielenia będą wykonalne (nie wystąpi dzielenie przez
zero).
Można pokazać, że warunki wystarczające dla powodzenia przebiegu obliczeń metodą
przeganiania mają następującą postać:
0
1
0
0
1
1
1)
0,
0 ,
0 ,
0 ,
1,..,
2
2)
,
1,..,
2
,
n
k
k
k
k
k
n
n
c
c
a
b
k
n
c
a
b
i
n
c
b
c
a
Przynajmniej jedna z ty
warunki
ch niero
diagonalnej domina
wnosci musi byc OS
cji
TRA!
Wyszukiwarka
Podobne podstrony:
2 Interpolacja funkcjiid 19545 Nieznany
Interpolacja funkcjami sklejanymi
marcinka all, 20021112, INTERPOLACJA FUNKCJAMI SKLEJANYMI:
Interpolacja funkcjami sklejanymi
2 Interpolacja funkcjiid 19545 Nieznany
Interpolacja funkcjami sklejanymi
interpolacja wielomianowa i funkcja sklejana
3 funkcje zespolone Nieznany (2)
interpretacje 2010koszykowka id Nieznany
W MF80, Interpolacja funkcji
W MF03, 1. Interpolacja funkcji
W MF84W, Interpolacja funkcji
W MF26, Interpolacja funkcji
W MF75, Interpolacja funkcji
więcej podobnych podstron