Badania
operacyjne
(#3)
dr inż. Marek Rabiński
Wyższa Szkoła Działalności Gospodarczej

2
Badania operacyjne (część 3)
Zagadnienie optymalizacji
Programowanie liniowe
Programowanie w liczbach całkowitych
Programowanie nieliniowe.

3
Zagadnienie optymalizacyjne
Funkcja celu (kryterium decyzyjne)
f(x) = f(x
1
, x
2
, … , x
n
)
Zmienne decyzyjne (wielkości optymalizowane)
x
j
(j=1, 2, … , n)
Ograniczenia, warunki ograniczające (funkcja nakładów)
V
i
(x) = V
i
(x
1
, x
2
, … , x
n
) (i=1, 2, … , m)
(warunki uboczne).
Funkcje celu i nakładów są ciągłe i różniczkowalne (posiadają ciągłe
pochodne cząstkowe pierwszego i drugiego rzędu) i są określone na
n–wymiarowym wektorze x o nieujemnych składowych
x ≥ 0
(warunki brzegowe)
czyli
x
j
≥ 0
(j=1, 2, … , n).
Zadanie optymalizacyjne polega na wyznaczeniu ekstremum
(maksimum lub minimum) funkcji celu przy zadanych ograniczeniach.
Zadanie optymalizacyjne ma rozwiązanie jeśli nie jest wewnętrznie
sprzeczne (zbiór rozwiązań dopuszczalnych nie jest zbiorem pustym)
oraz gdy m ≤ n.
4
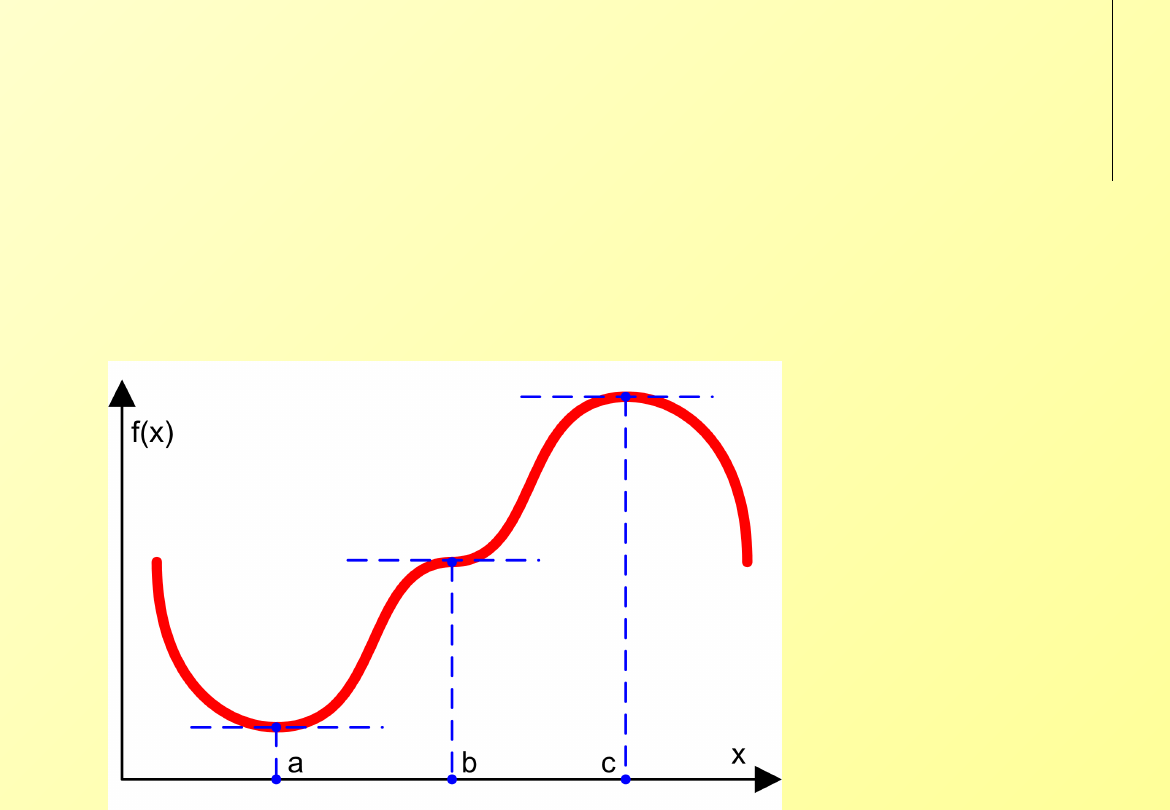
Ekstremum funkcji jednej
zmiennej
Funkcja celu: f(x)
W przedziale istnieje taki punkt x
0
, że f’(x
0
)=0 oraz f’’(x
0
)≠0
Druga pochodna f’’(x
0
) jest ciągła – w punkcie x
0
istnieje
ekstremum:
maksimum jeśli f’’(x
0
)<0
minimum jeśli f’’(x
0
)>0.
Dla f’’(x
0
)=0 w punkcie x
0
istnieje punkt przegięcia.
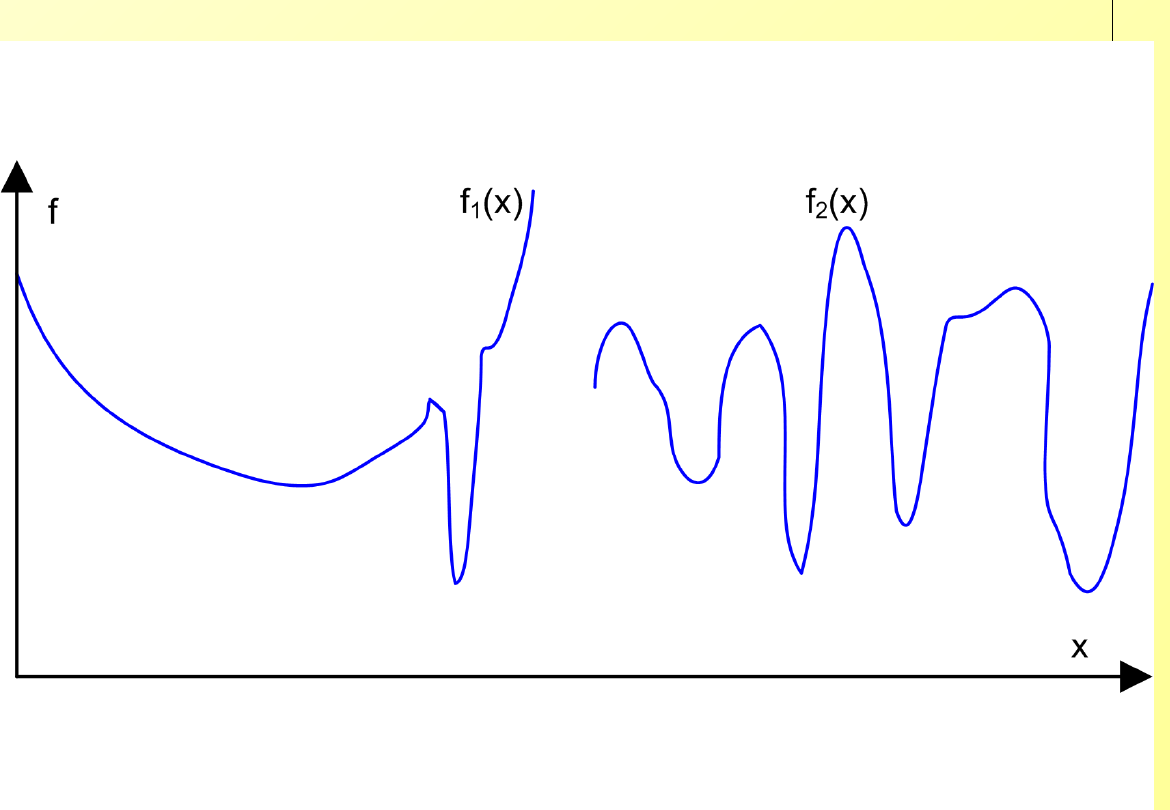
5
Funkcje trudne do
optymalizacji

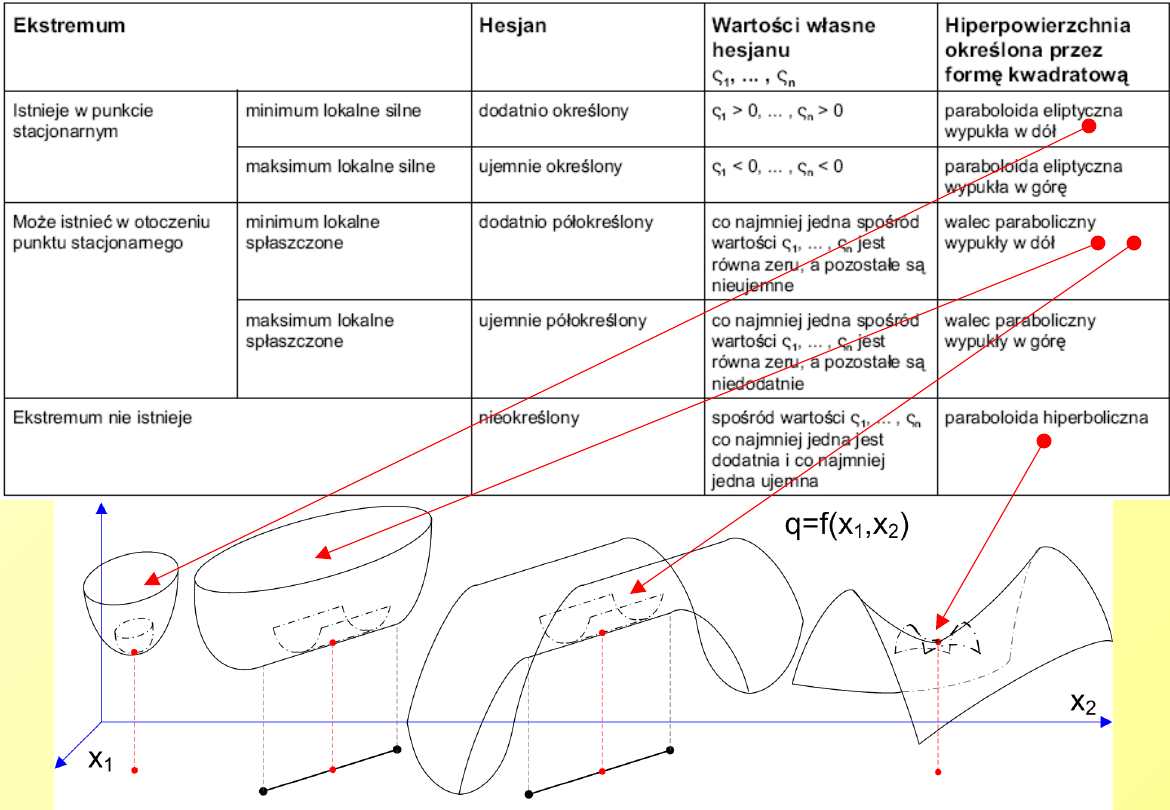
6
Ekstremum funkcji n
zmiennych
Funkcja celu – f(x)
Hesjan funkcji f(x) w punkcie x=(x
1
, x
2
, … x
n
)
| (∂
2
f / ∂
2
x
12
)
x
(∂
2
f / ∂x
1
∂
x
2
)
x
…
(∂
2
f / ∂x
1
∂
x
n
)
x
|
(
2
f)
x
=
| …
…
…
|
| (∂
2
f / ∂x
n
∂
x
1
)
x
(∂
2
f / ∂x
n
∂
x
2
)
x
…
(∂
2
f /
∂
2
x
n2
)
x
|
7
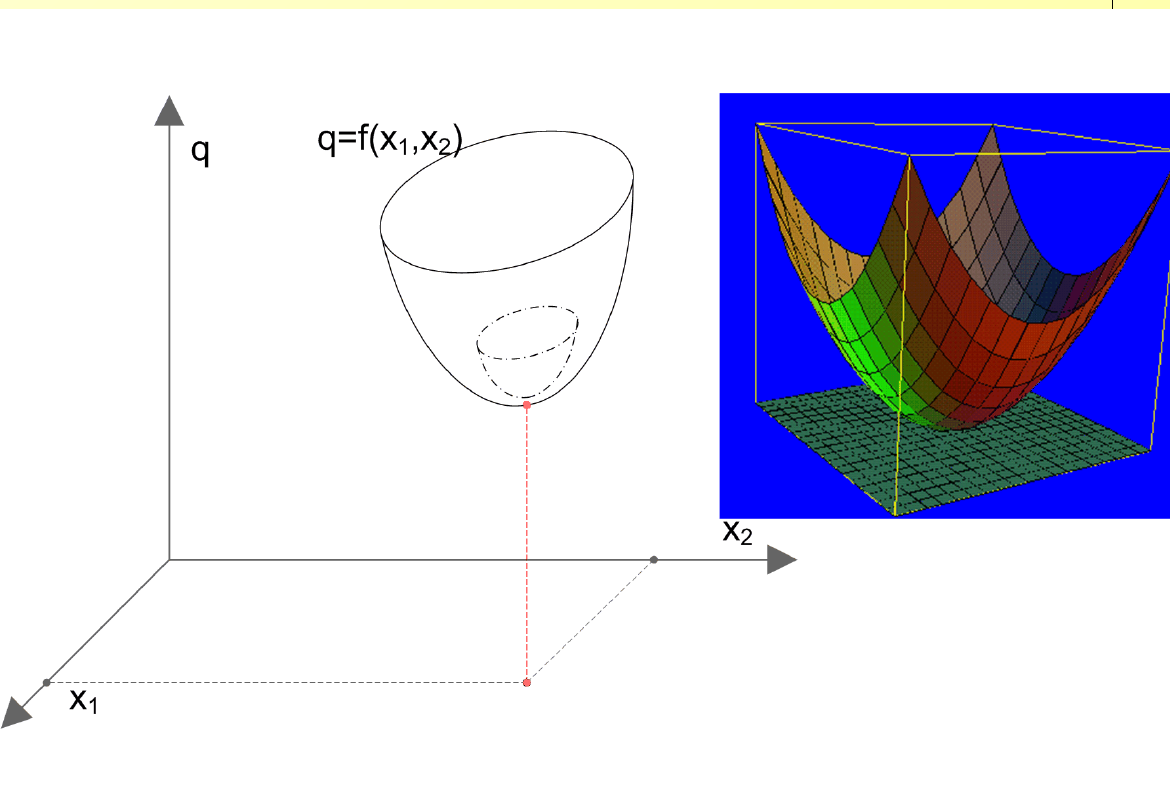
8
Paraboloida eliptyczna wypukła
w dół
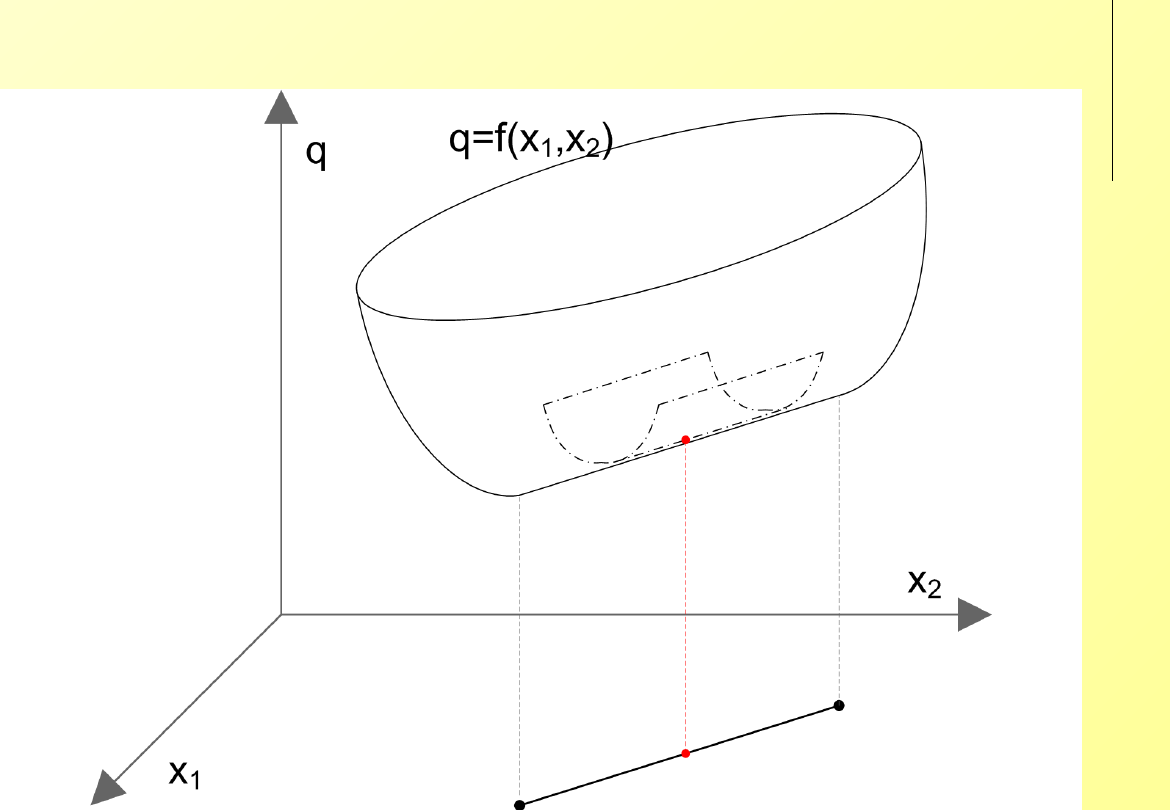
9
Walec paraboliczny wypukły w
dół
Minimum spłaszczone
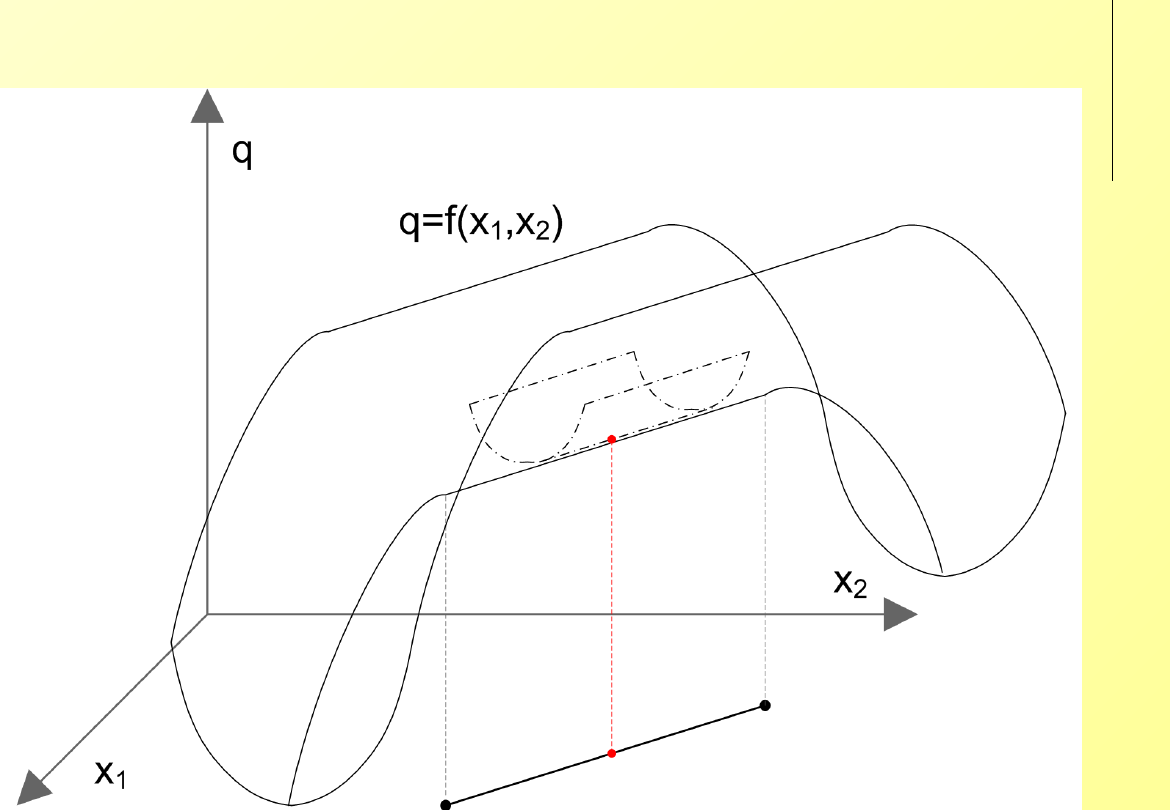
10
Walec paraboliczny wypukły w
dół
Minimum spłaszczone nie istnieje
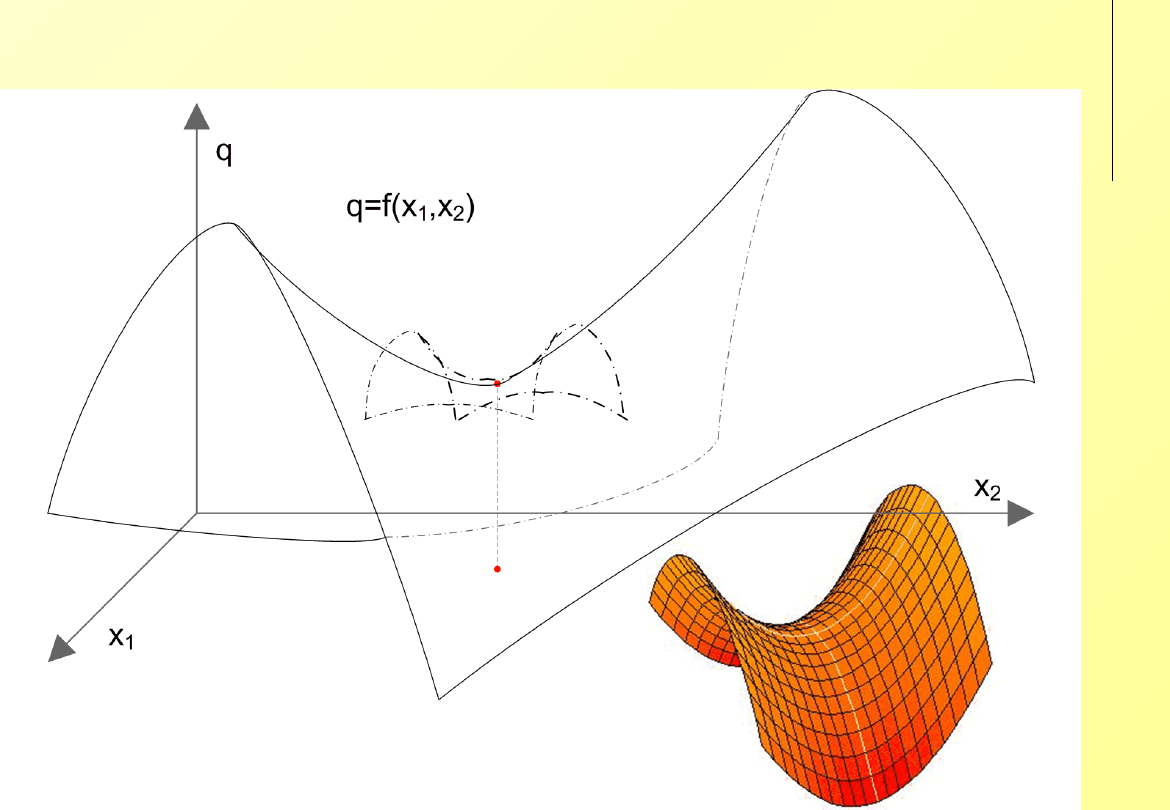
11
Paraboloida hiperboliczna
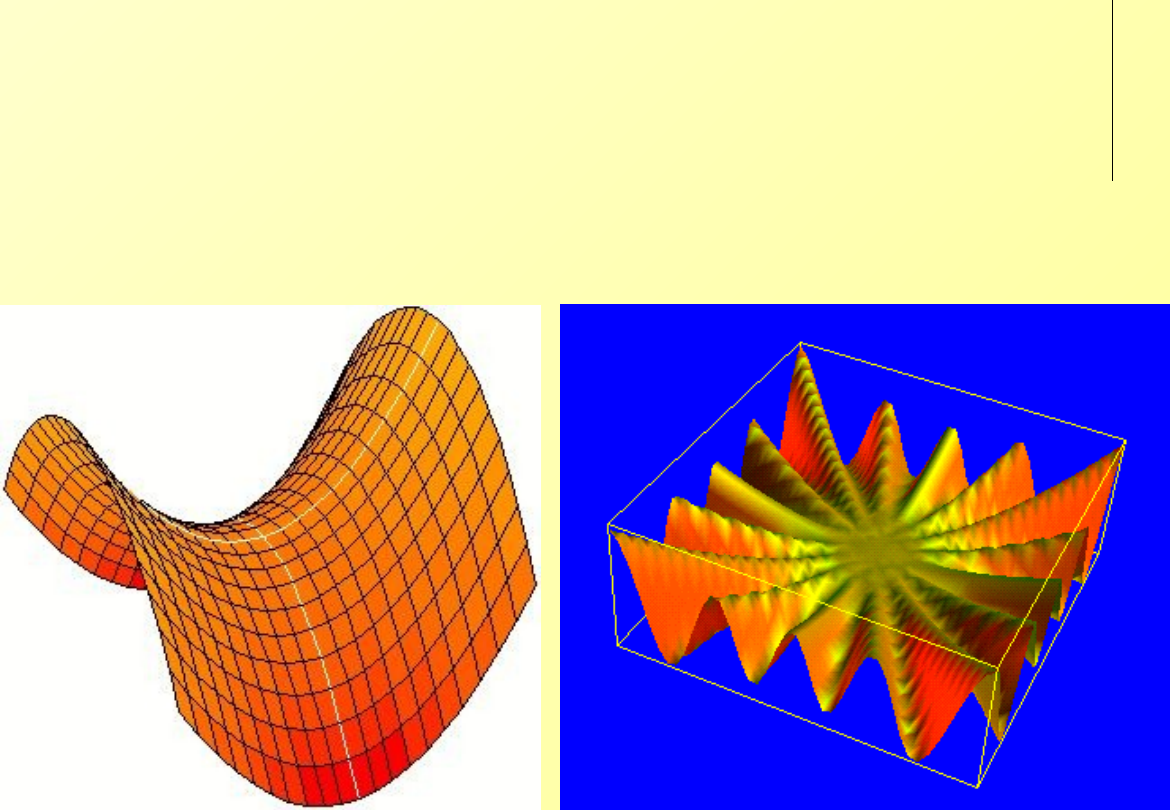
12
Paraboloida hiperboliczna
Punkt siodłowy

13
Programowanie liniowe
Programowanie liniowe (ang: linear programming) – liniowe
zagadnienie optymalizacji.
Zagadnienia optymalizacji były rozwijane niezależnie w różnych
dziedzinach nauki, stąd terminologia poszczególnych zagadnień
jest zróżnicowana i niespójna. Spowodowało to powstanie i
upowszechnienie wielu specyficznych określeń, takich jak –
‘programowanie liniowe’, ‘programowanie nieliniowe’.
Określenia te posiadają długą tradycję, stąd w niektórych
dziedzinach (np. ekonomii) są powszechnie używane. Jednak w
naukach technicznych są uznawane za wybitnie mylące, ze
względu na skojarzenia z programowaniem komputerów. Dlatego
w teorii optymalizacji używa się określenia ‘poszukiwanie
ekstremum funkcji liniowych przy liniowych warunkach
ograniczających’.

14
Programowanie liniowe
Funkcja celu jest:
funkcją liniową – zawiera zmienne decyzyjne wyłącznie stopnia
pierwszego (np. f(x
1
) = a*x
1
+ b)
lub jest formą liniową – funkcją liniową bez wyrazu wolnego od
zmiennej x
1
(np. f(x
1
) = a*x
1
)
Warunki uboczne V
i
(x) = V
i
(x
1
, x
2
, … , x
n
) (i=1, 2, … , m) mają
postać układu równań liniowych
a
i1
x
1
+ a
i2
x
2
+ … + a
in
x
n
= b
i
(i=1, 2, … , m)
lub nierówności liniowych
a
i1
x
1
+ a
i2
x
2
+ … + a
in
x
n
≤ b
i
(i=1, 2, … , m)
Warunki uboczne oraz brzegowe wyznaczają dopuszczalny
obszar rozwiązań.
15
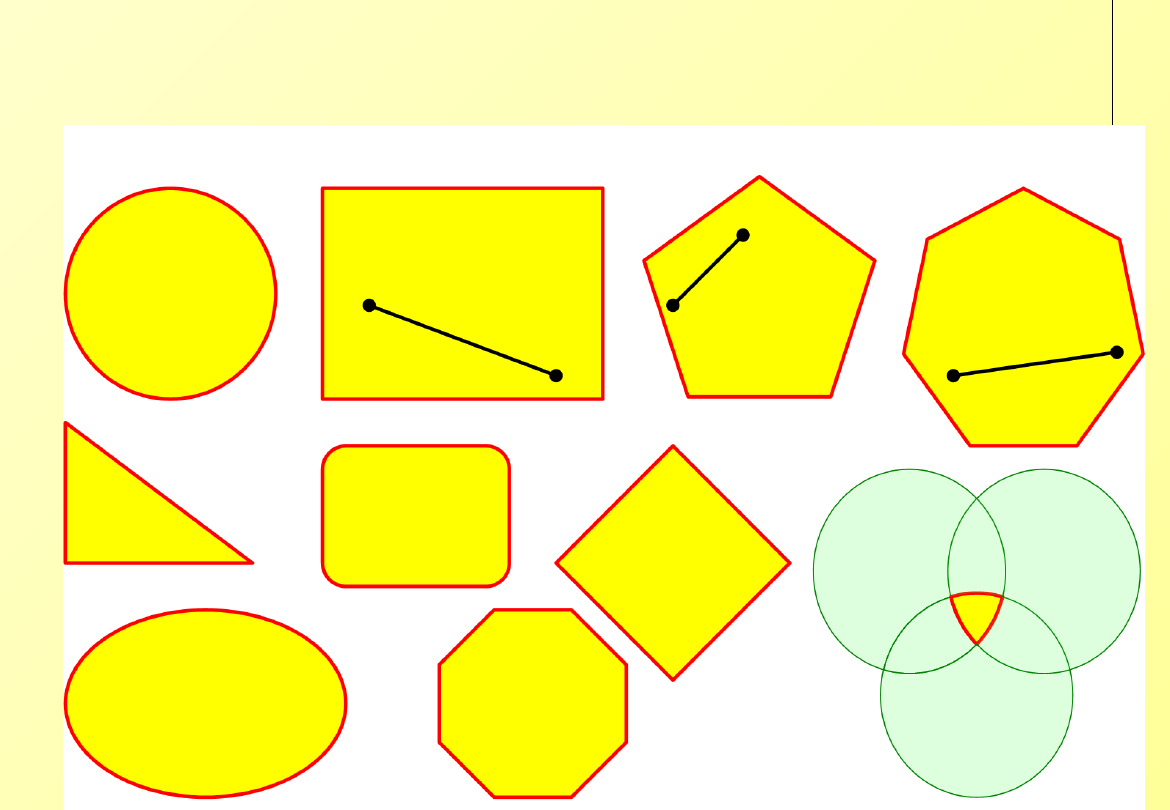
Zbiór wypukły
Zbiór punktów, dla którego wszystkie punkty na odcinku
łączącym dwa punkty p i q należące do zbioru – należą również
do tego zbioru.
16
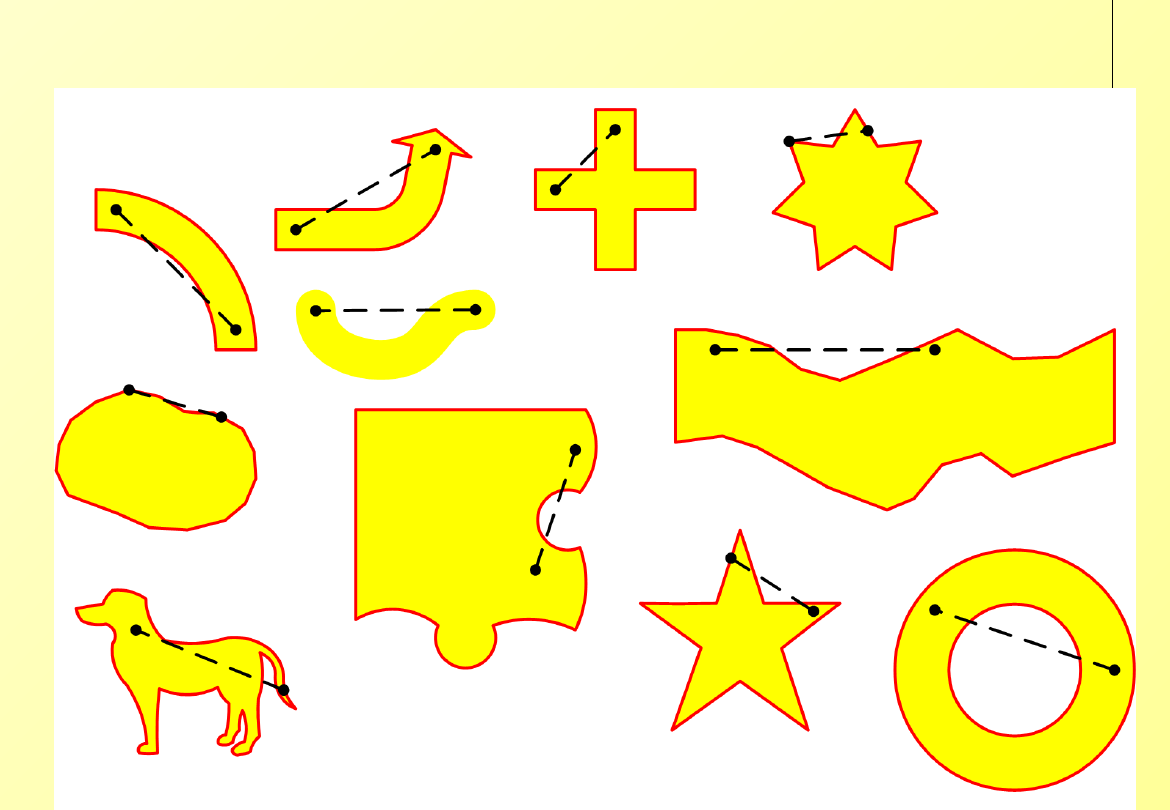
Zbiory niewypukłe

17
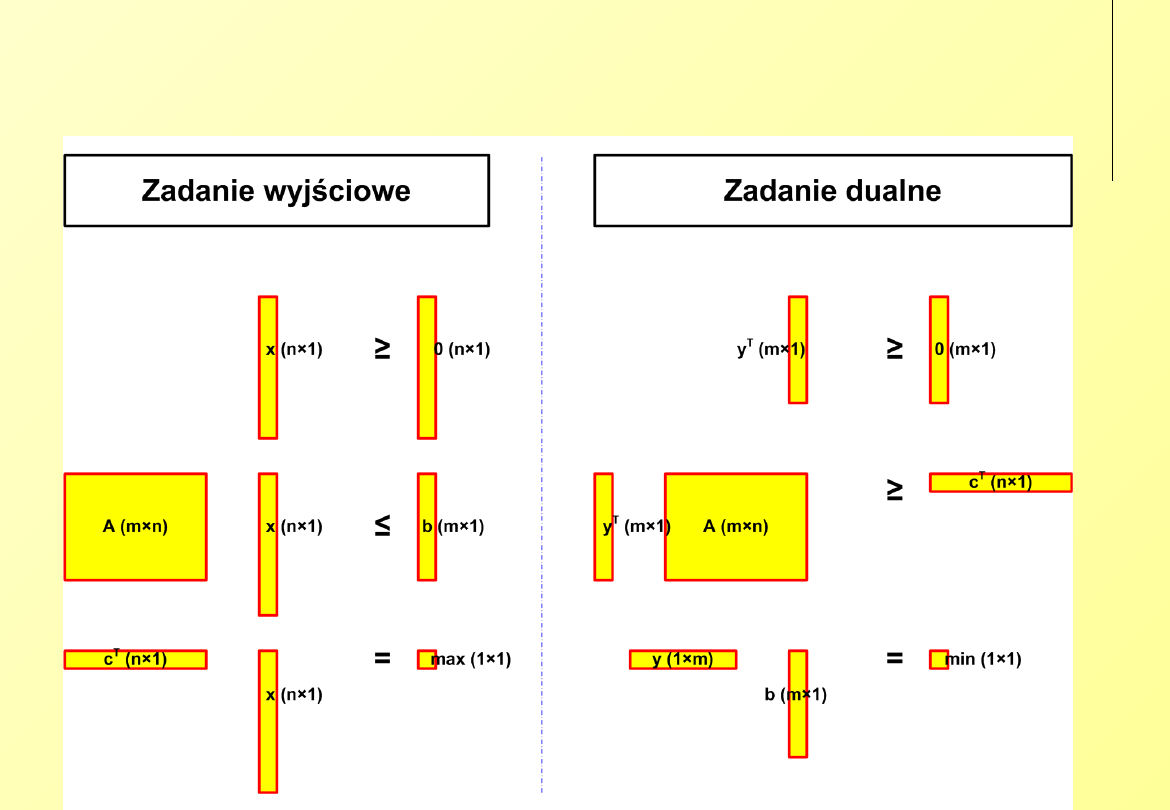
Zagadnienie dualne
programowania liniowego
Pierwotne zadanie wyjściowe
c
T
x → max,
A x ≤ b,
x ≥ 0.
Dla każdego zagadnienia programowania liniowego można
stworzyć dualne zagadnienie, które również jest zagadnieniem
programowania liniowego. Między zagadnieniami występują
wzajemne zależności – np. zadanie dualne zagadnienia
dualnego jest wyjściowym zadaniem pierwotnym.
Zadanie dualne
y b → min,
y
T
A ≥ c
T
,
y
T
≥ 0.
18
Zagadnienie dualne
programowania liniowego

19
Przykład: planowanie
produkcji
Przedsiębiorstwo może produkować dwa wyroby:
X
1
– urządzenie o opanowanej technologicznie produkcji, choć
niezbyt nowoczesne,
X
2
– urządzenie nowoczesne, jednak o wyższych kosztach
komponentów i mniejszej zyskowności produkcji.
Rozpatrywane zagadnienie polega na określeniu optymalnej
wielkości produkcji obu wyrobów, przynoszącej
przedsiębiorstwu maksymalny zysk.
Zmienne decyzyjne:
x
1
– wielkość produkcji wyrobu X
1
,
x
2
– wielkość produkcji wyrobu X
2
.
Swobodę decyzyjną ograniczają zasoby przedsiębiorstwa:
99 jednostek surowca,
96 jednostek czasu pracy urządzeń produkcyjnych,
125 jednostek powierzchni produkcyjnej,
utrzymanie się na rynku branży wymaga wyprodukowania co
najmniej 1 jednostki (partii) wyrobu X
2
.

20
Przykład: planowanie
produkcji
Jednostkowe zużycie zasobów (spowodowane stosowanymi
technologiami) wymaga:
zużycia surowców –
9 jednostek surowca na jednostkę wyrobu X
1
,
11 jednostek surowca na jednostkę X
2
.
czasu pracy urządzeń –
12 jednostek czasu pracy na jednostkę wyrobu X
1
,
8 jednostek czasu na jednostkę X
2
.
wykorzystania powierzchni produkcyjnej –
10 jednostek powierzchni na jednostkę wyrobu X
1
,
10 jednostek powierzchni na jednostkę X
2
.
Jednostkowe zyski z produkcji wynoszą odpowiednio:
6 jednostek monetarnych na jednostkę wyrobu X
1
,
2.5 jednostek monetarnych na jednostkę X
2
.

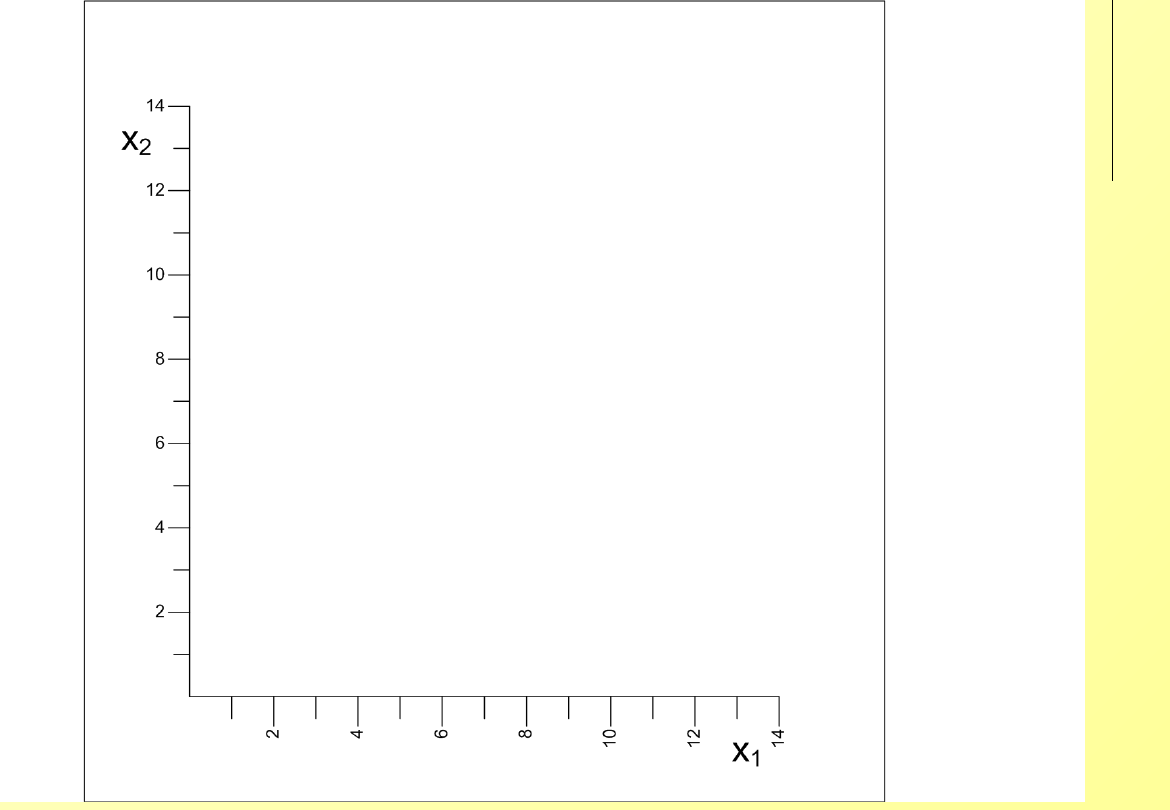
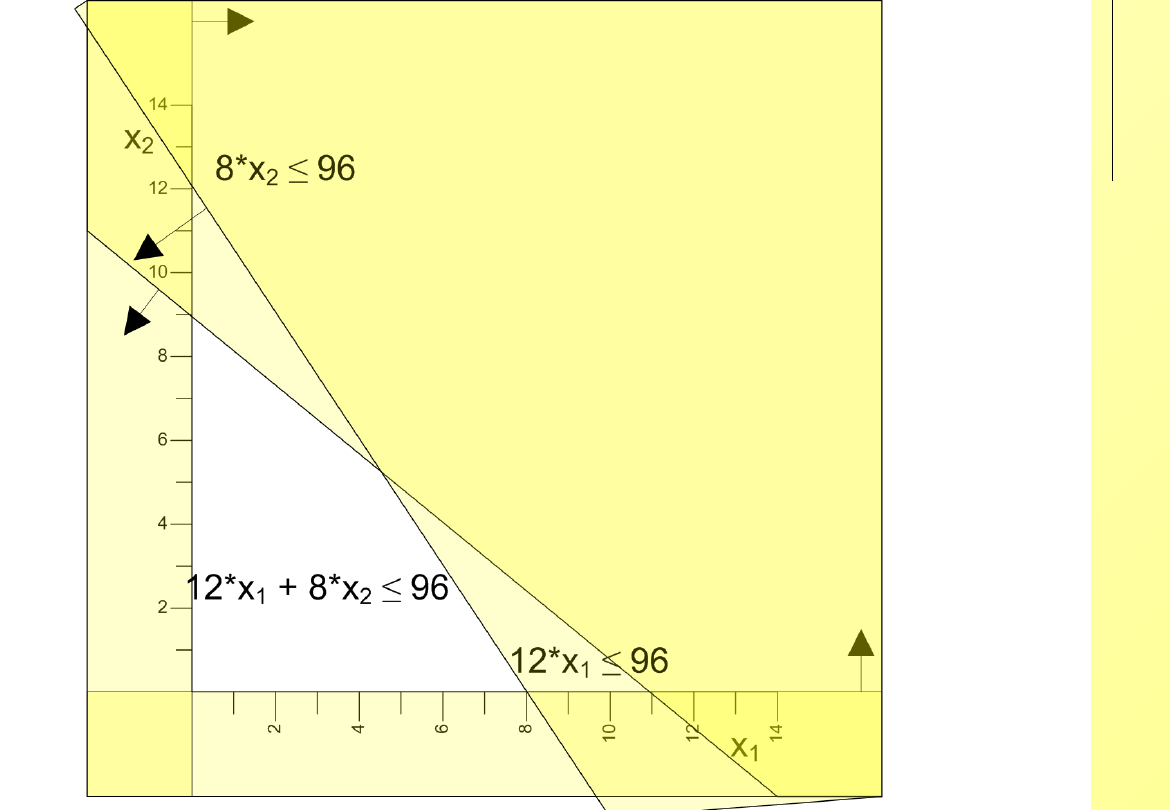
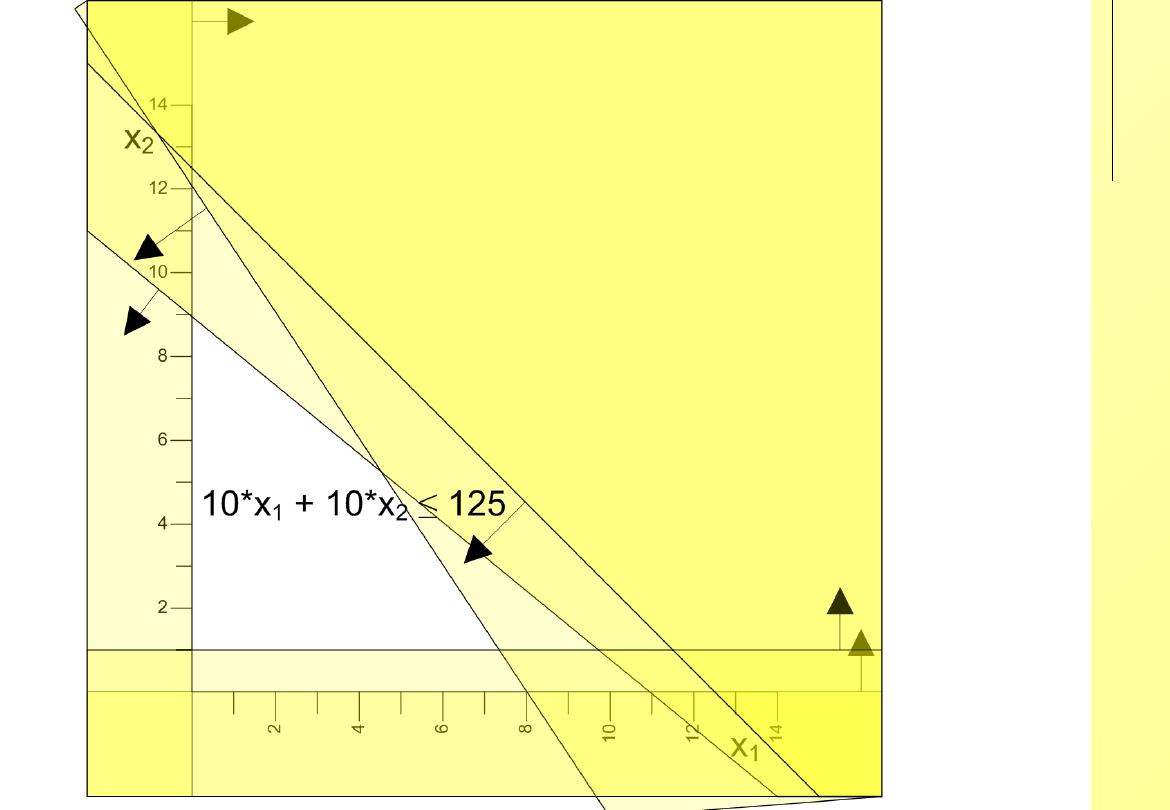
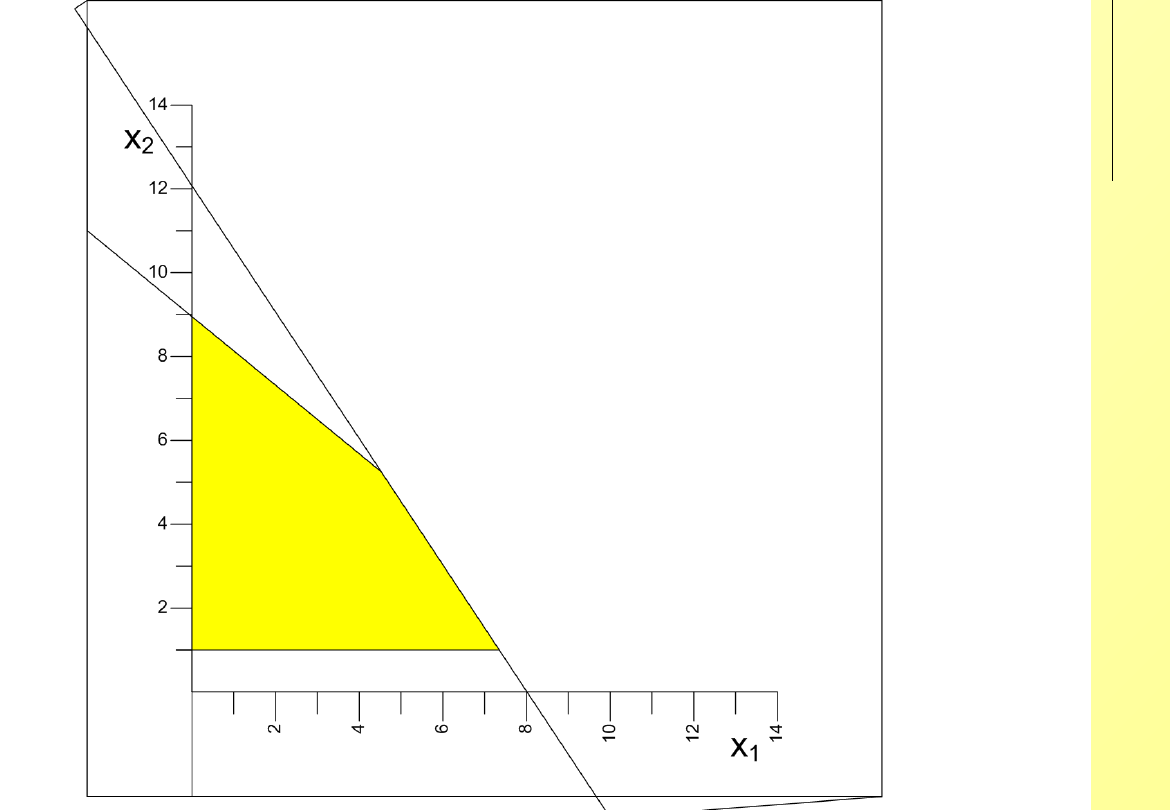
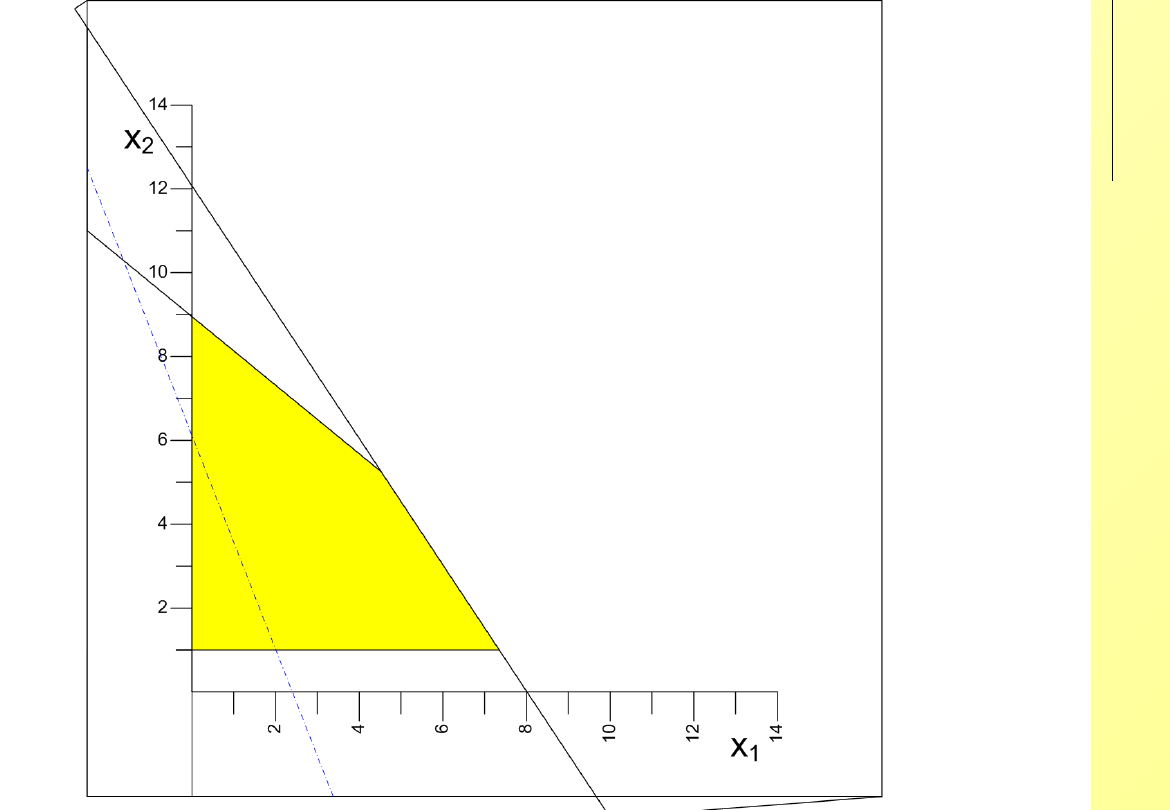
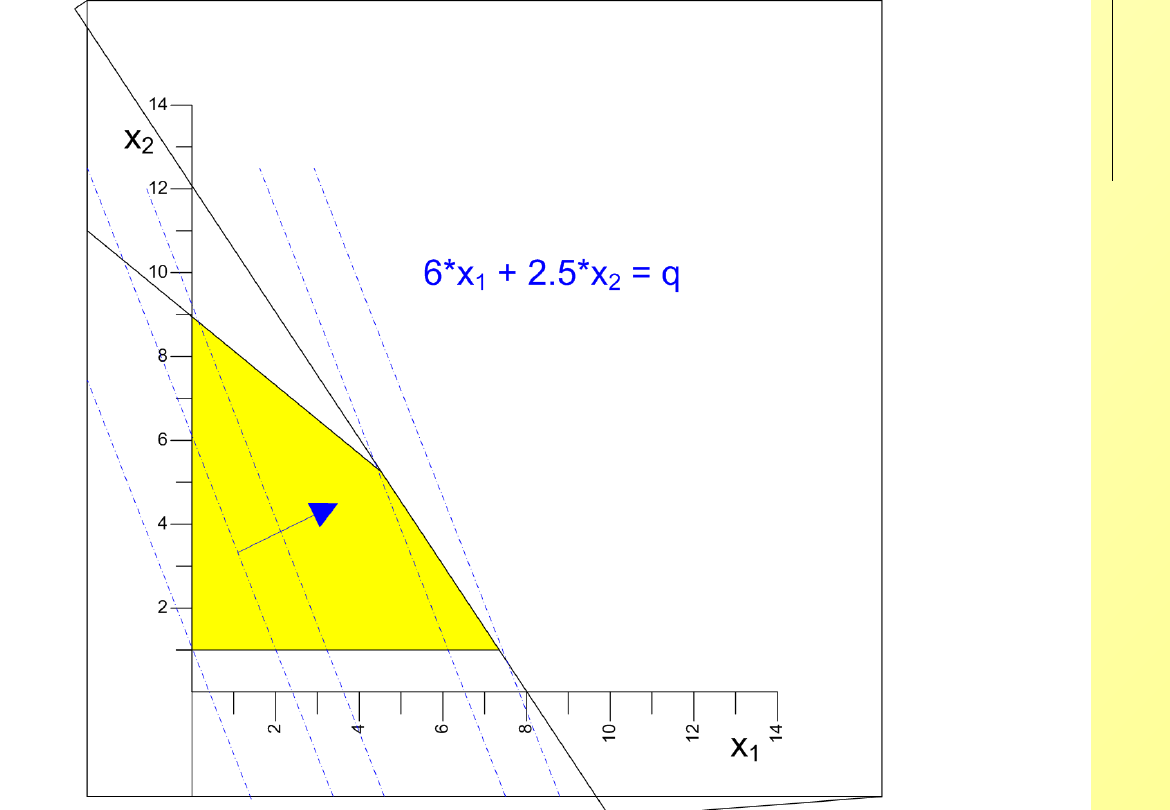
21
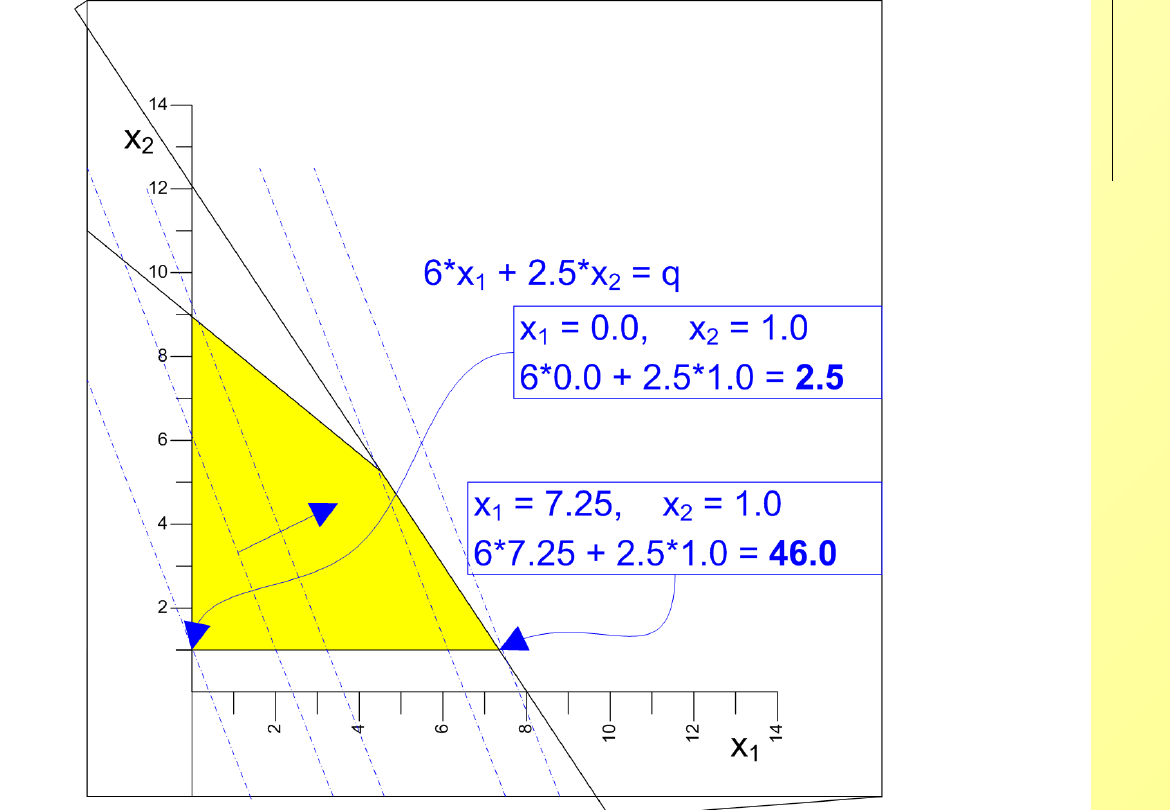
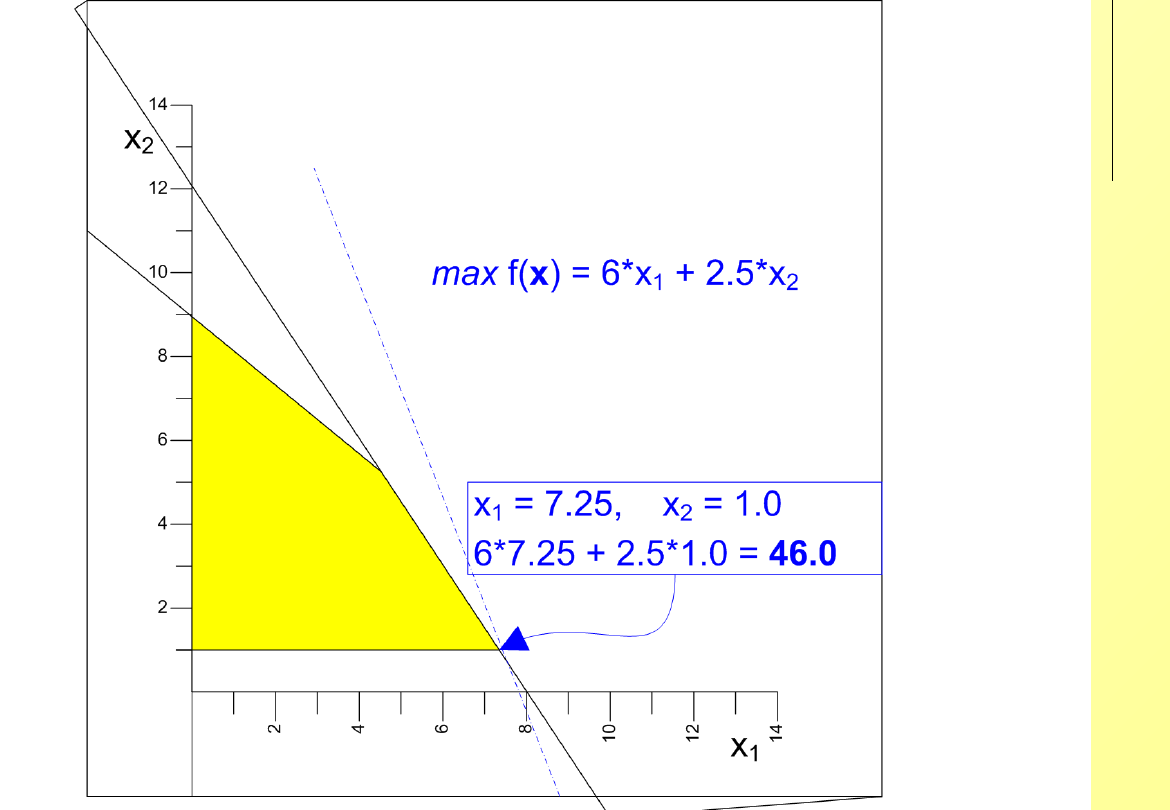
Model matematyczny zagadnienia:
max f(x) = 6*x
1
+ 2.5*x
2
(zysk z produkcji)
x
1
≥ 0
x
2
≥ 0
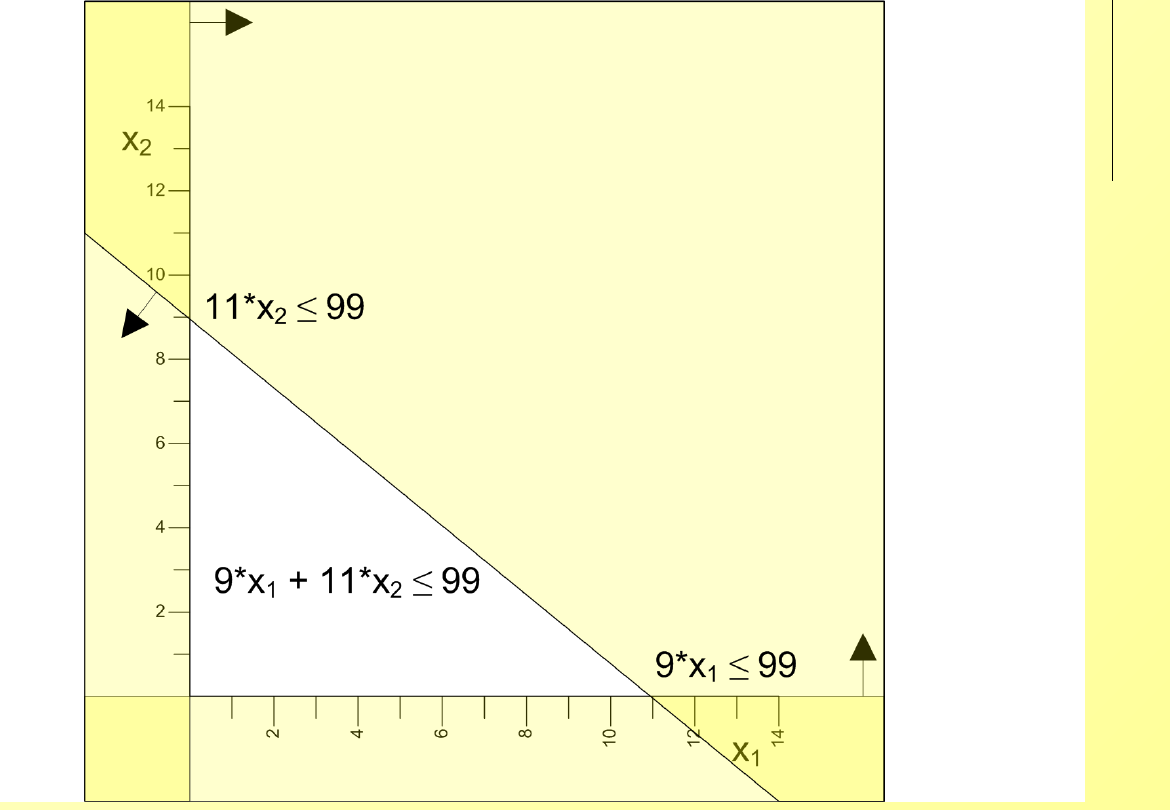
9*x
1
+ 11*x
2
≤ 99 (zużycie surowców)
12*x
1
+ 8*x
2
≤ 96 (wykorzystanie urządzeń)
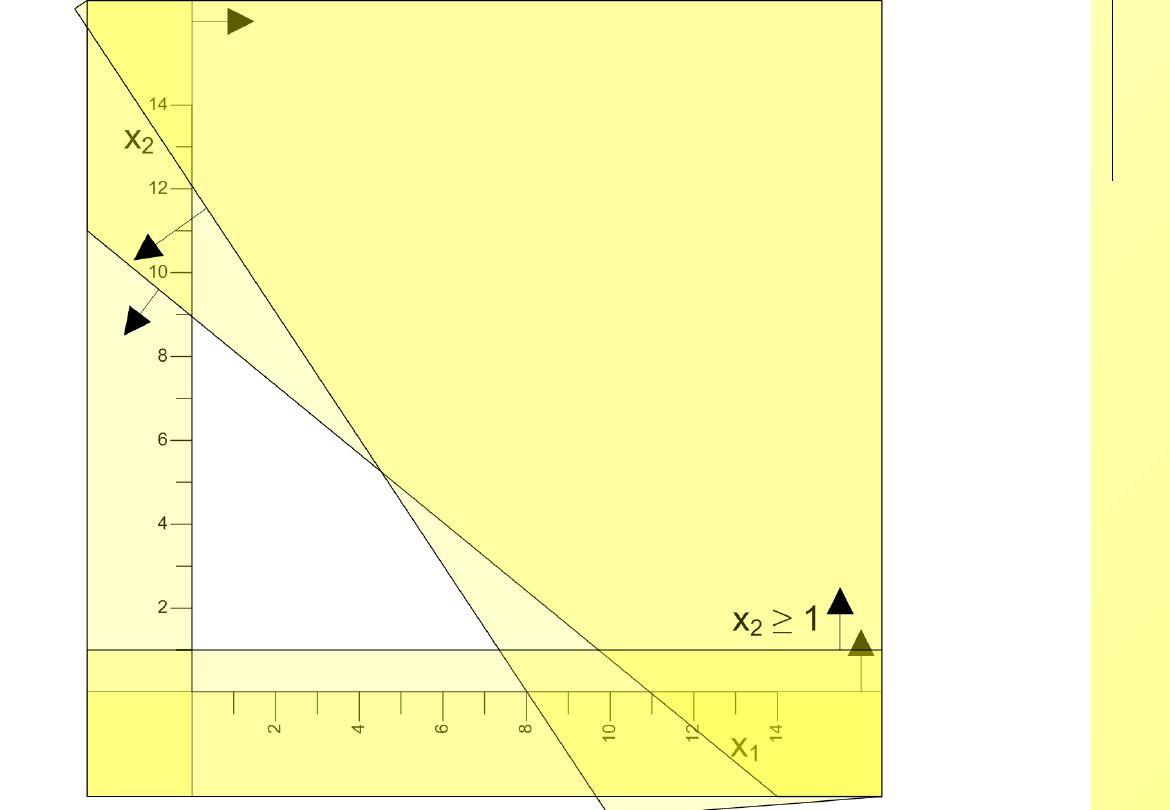
x
2
≥ 1
(warunek utrzymania się na rynku)
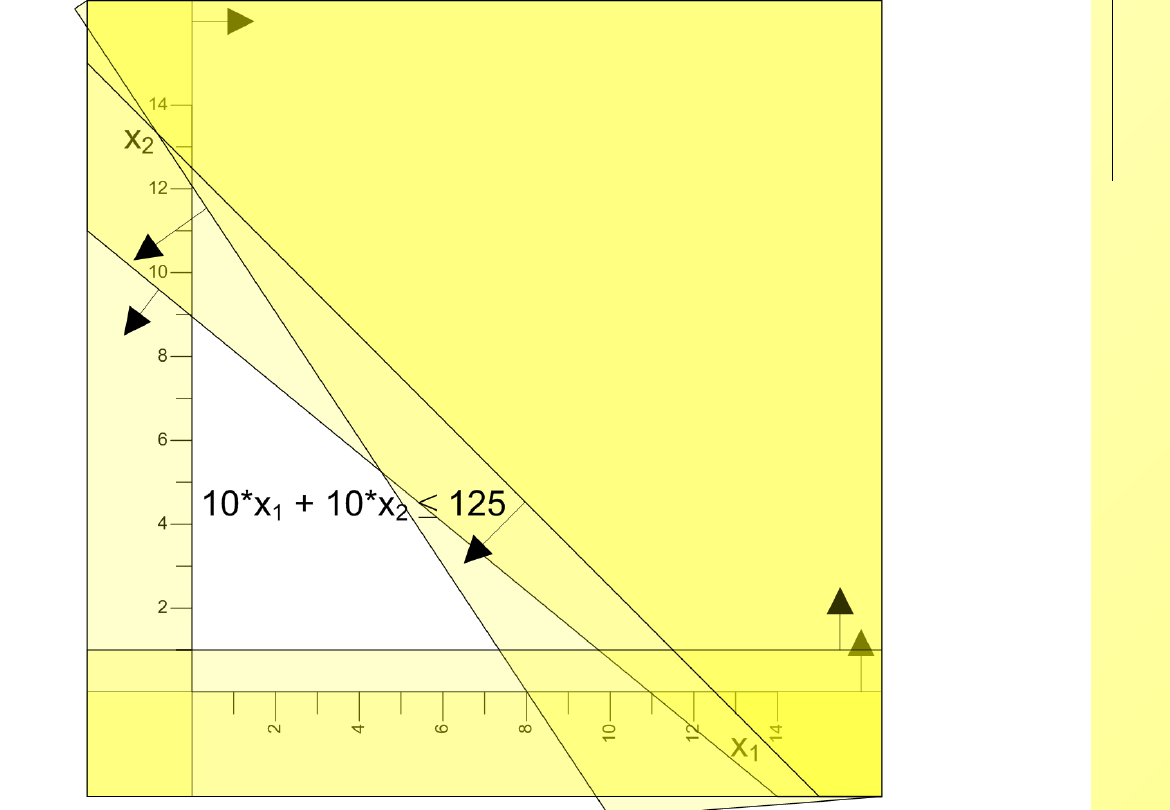
10*x
1
+ 10*x
2
≤ 125
(powierzchnia produkcyjna)
22
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
23
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
24
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
25
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
26
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
27
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
28
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤
125
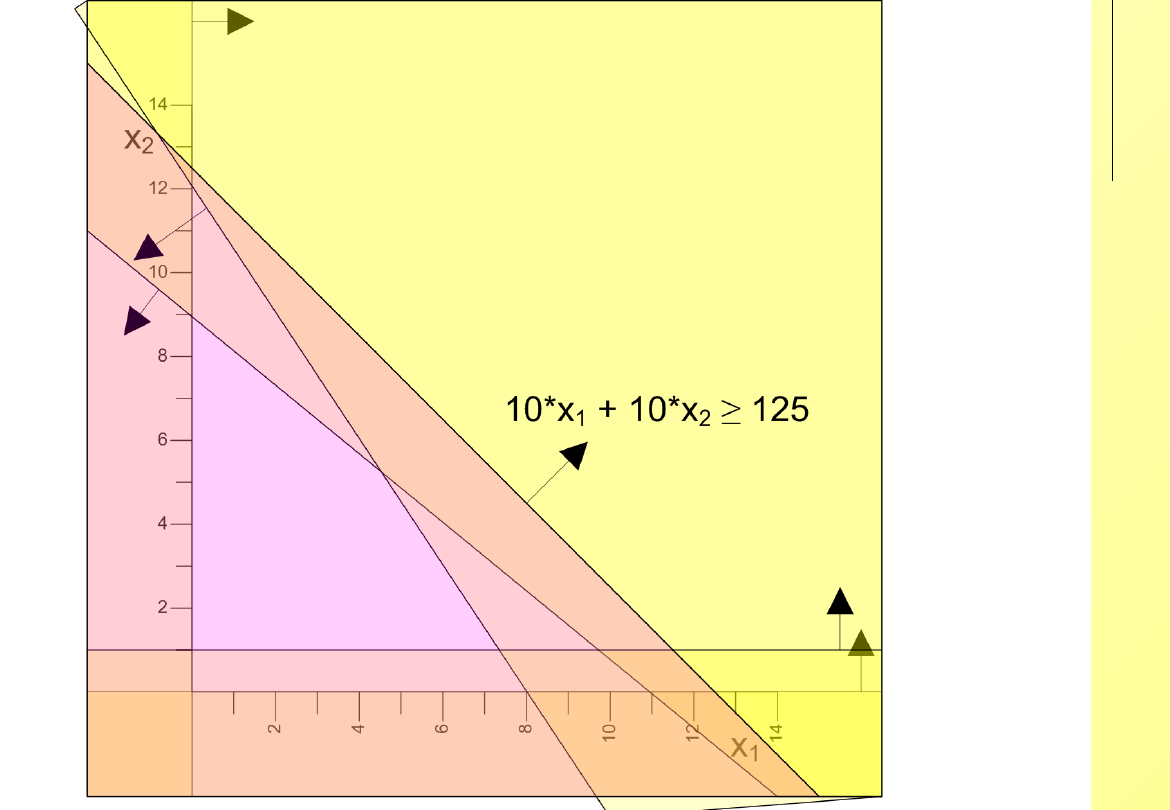
29
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≥
125
30
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤
125
31
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤
125
32
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
33
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
34
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
35
max f(x) = 6*x
1
+
2.5*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
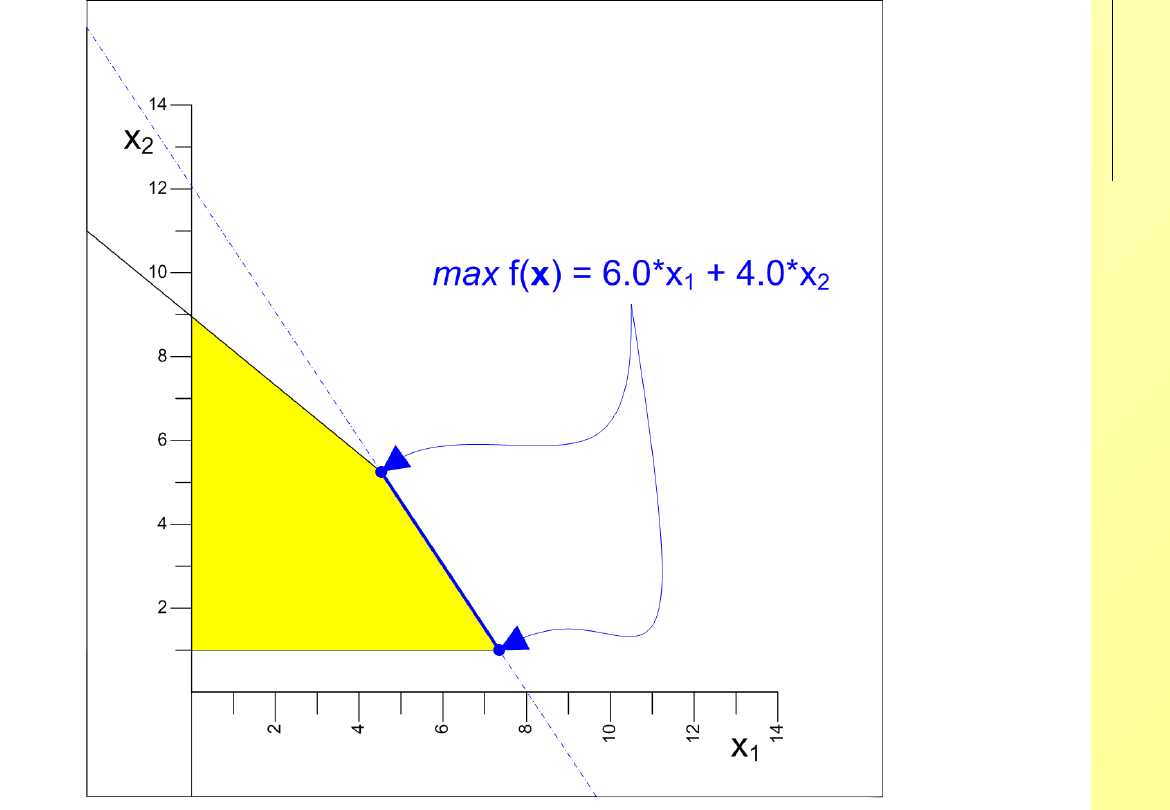
36
max f(x) = 6*x
1
+
4.0*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
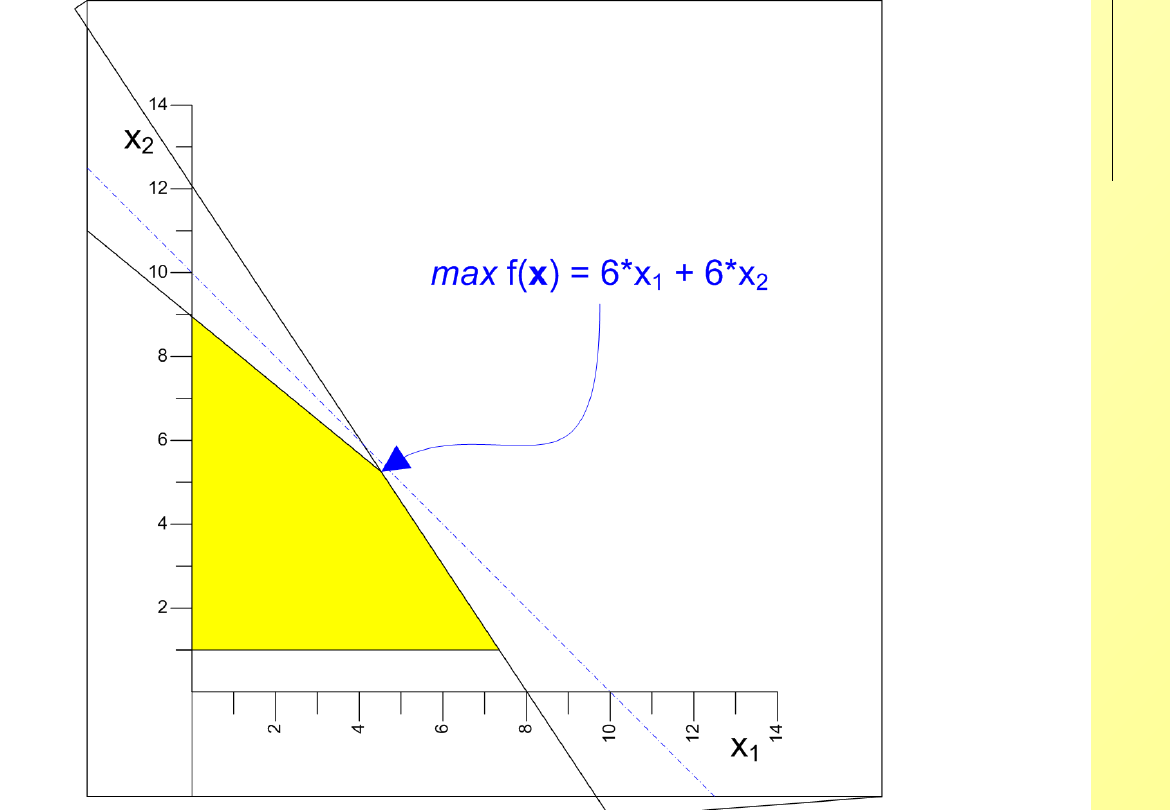
37
max f(x) = 6*x
1
+
6.0*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
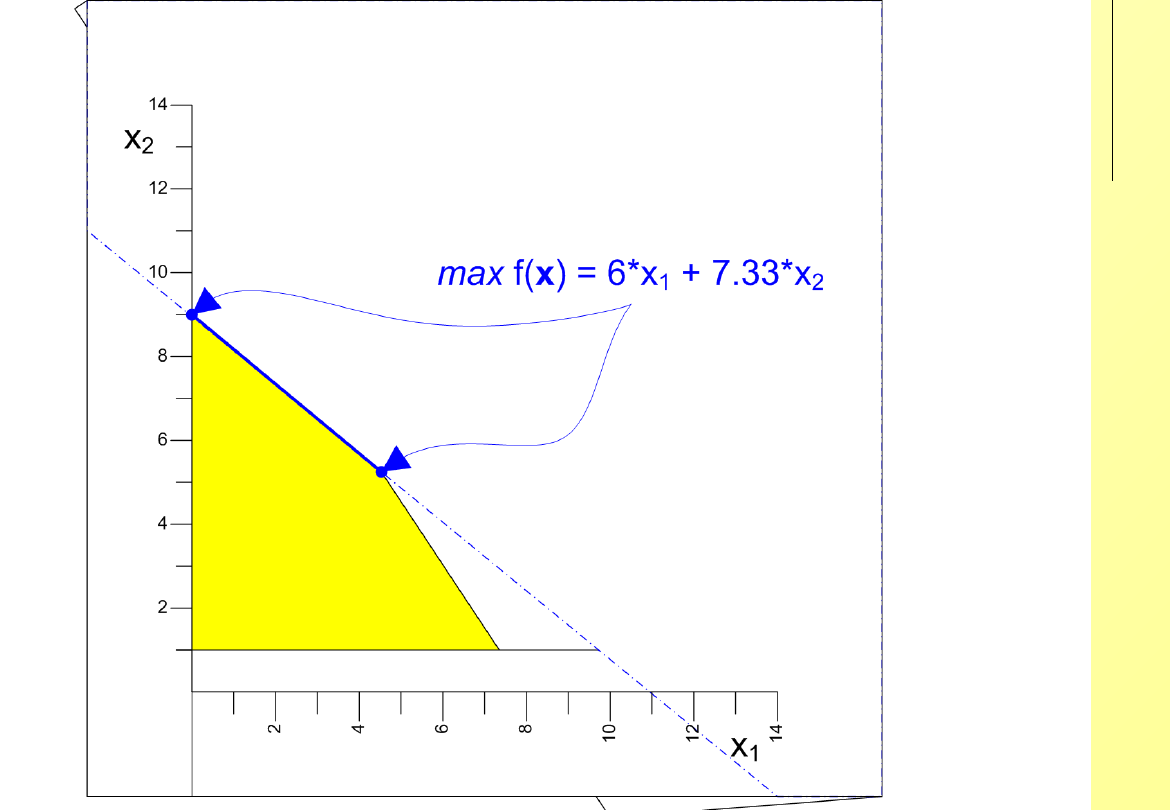
38
max f(x) = 6*x
1
+7.33*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125
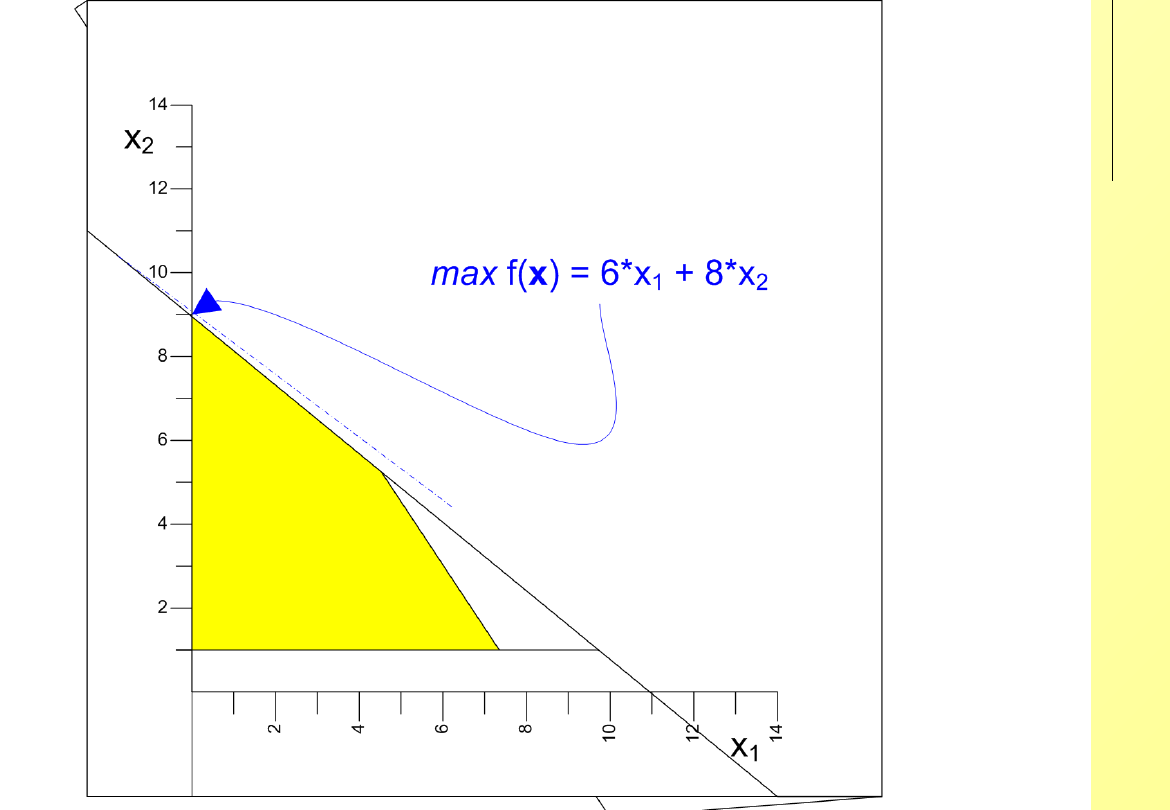
39
max f(x) = 6*x
1
+
8.0*x
2
x
1
≥ 0
x
2
≥ 0
9*x
1
+ 11*x
2
≤ 99
12*x
1
+ 8*x
2
≤ 96
x
2
≥ 1
10*x
1
+ 10*x
2
≤ 125

40
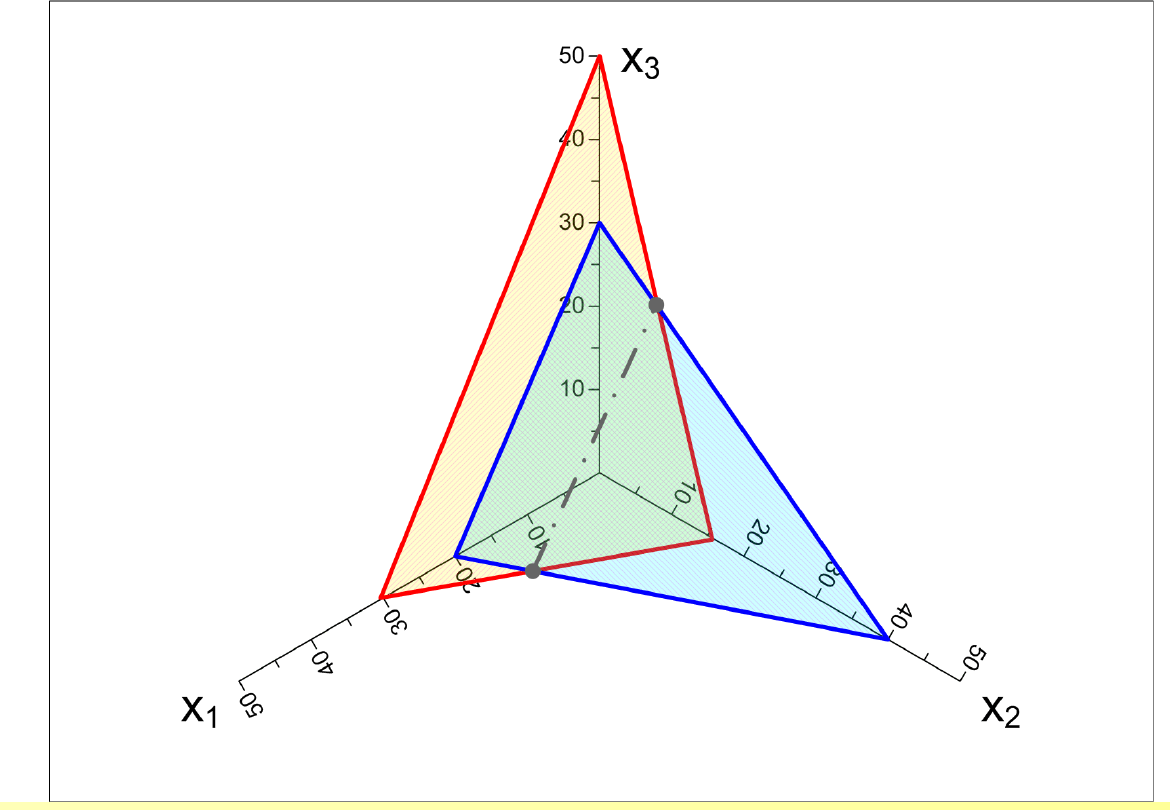
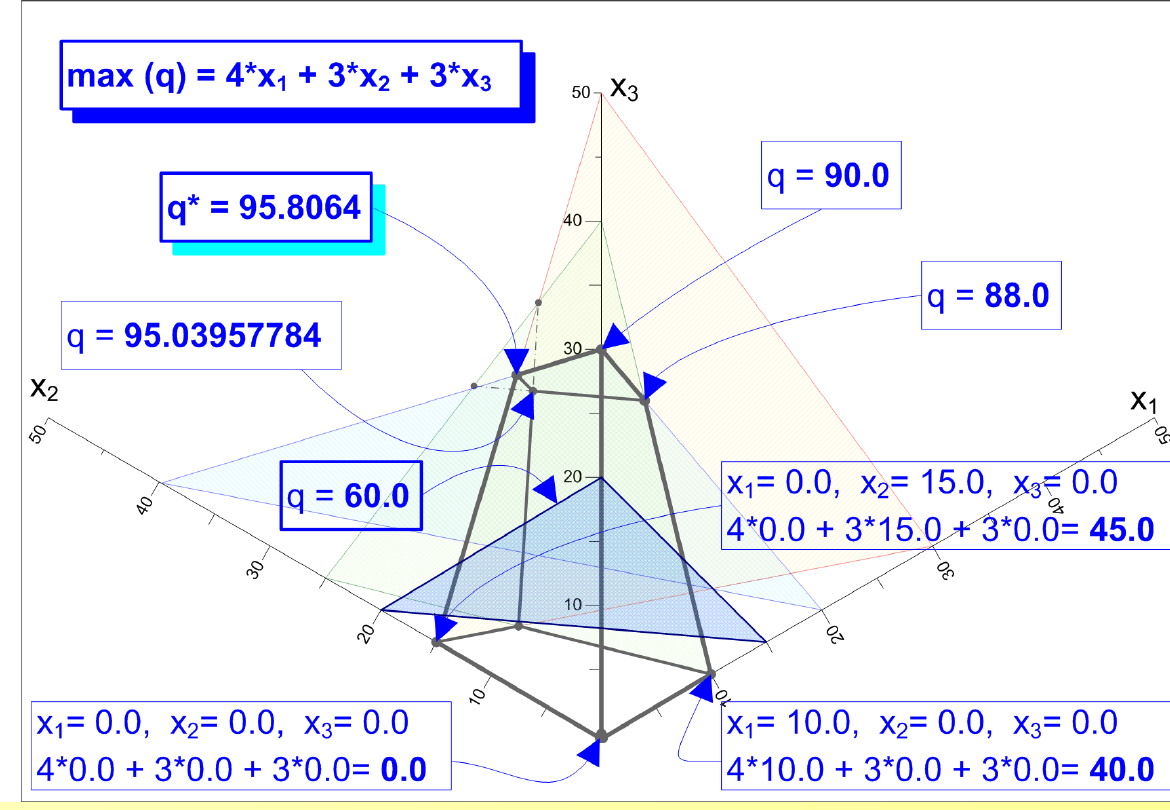
Zagadnienie trójwymiarowe
Model matematyczny zagadnienia:
max f(x) = 4*x
1
+ 3*x
2
+ 3*x
3
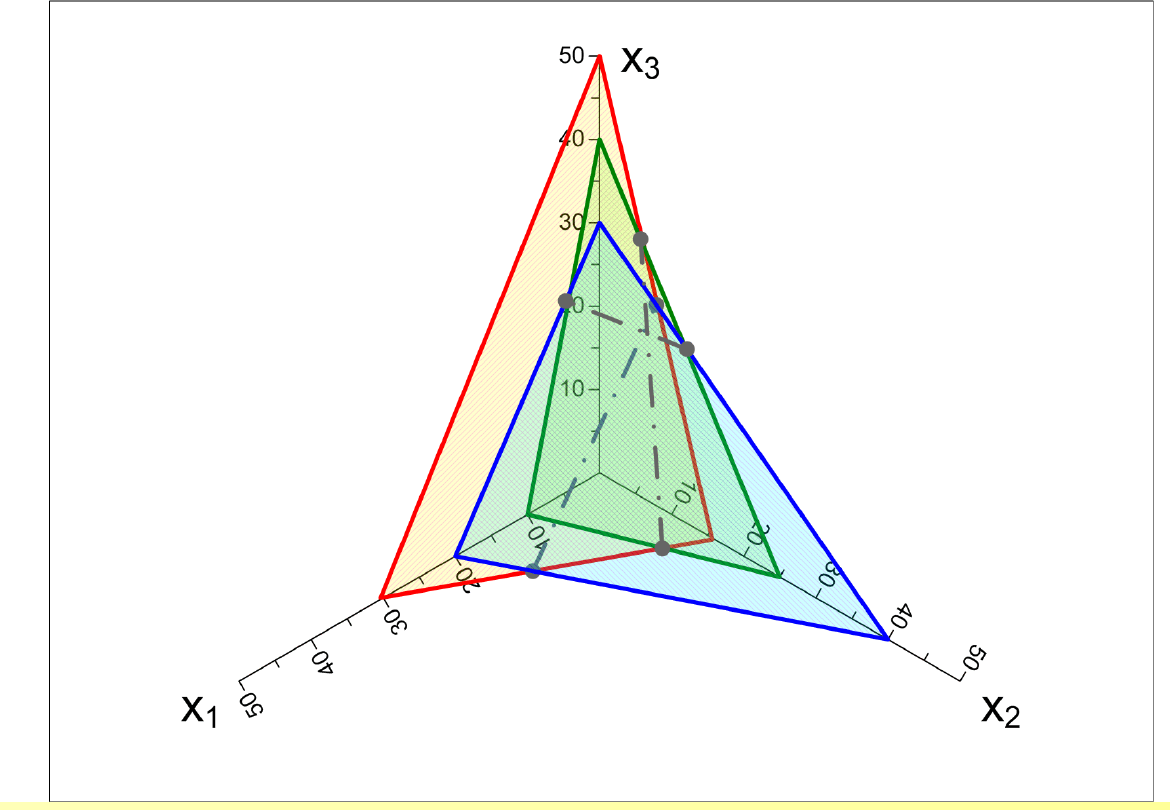
75*x
1
+ 150*x
2
+ 45*x
3
≤ 2250
120*x
1
+ 60*x
2
+ 80*x
3
≤ 2400
100*x
1
+ 40*x
2
+ 25*x
3
≤ 1000
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0
41
Aksonometria ‘kawaleryjska’ – identyczna skala na wszystkich
osiach
42
75*x
1
+ 150*x
2
+ 45*x
3
≤ 2250
120*x
1
+ 60*x
2
+ 80*x
3
≤ 2400
100*x
1
+ 40*x
2
+ 25*x
3
≤ 1000
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0
43
75*x
1
+ 150*x
2
+ 45*x
3
≤ 2250
120*x
1
+ 60*x
2
+ 80*x
3
≤ 2400
100*x
1
+ 40*x
2
+ 25*x
3
≤ 1000
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0
44
75*x
1
+ 150*x
2
+ 45*x
3
≤ 2250
120*x
1
+ 60*x
2
+ 80*x
3
≤ 2400
100*x
1
+ 40*x
2
+ 25*x
3
≤ 1000
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0
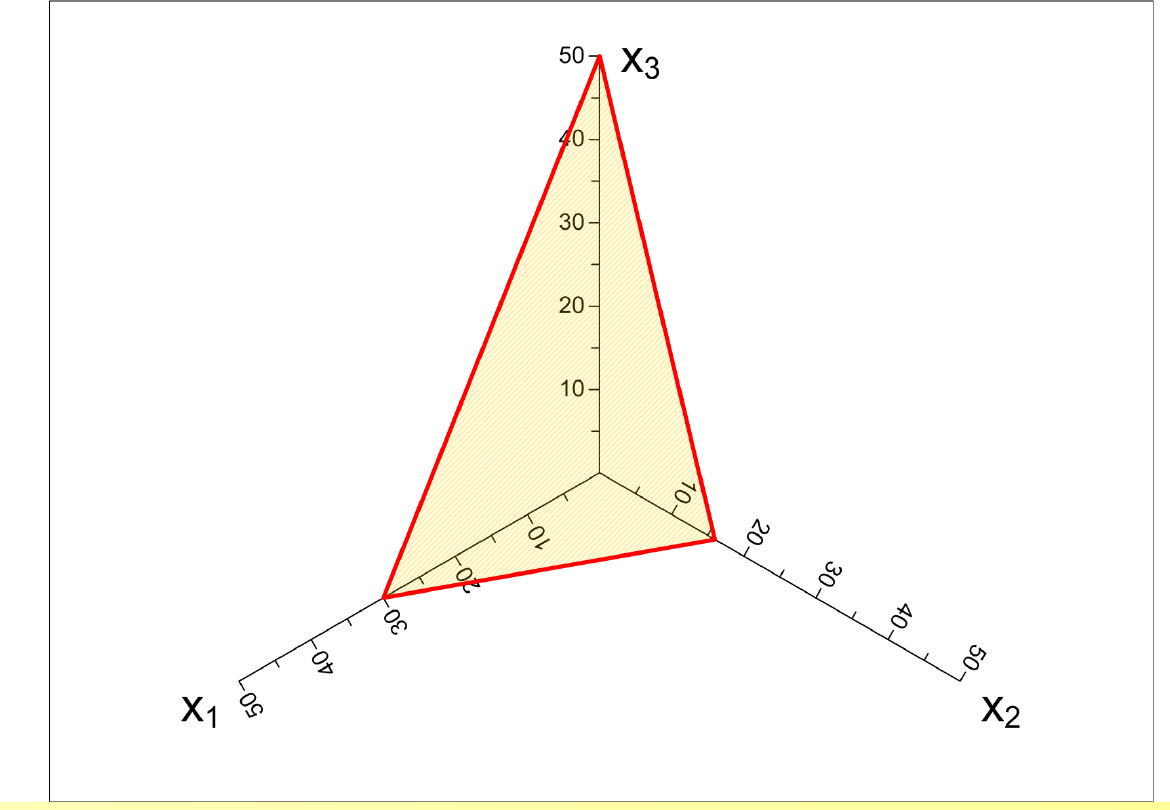
45
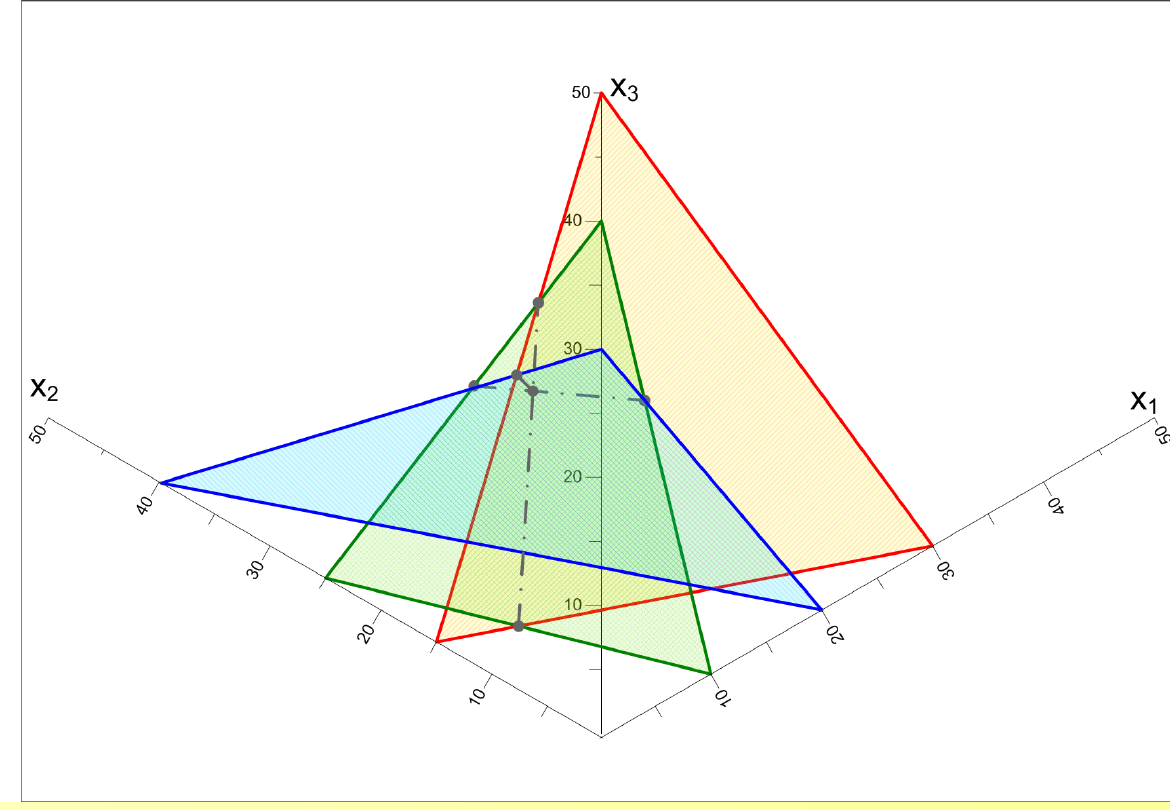
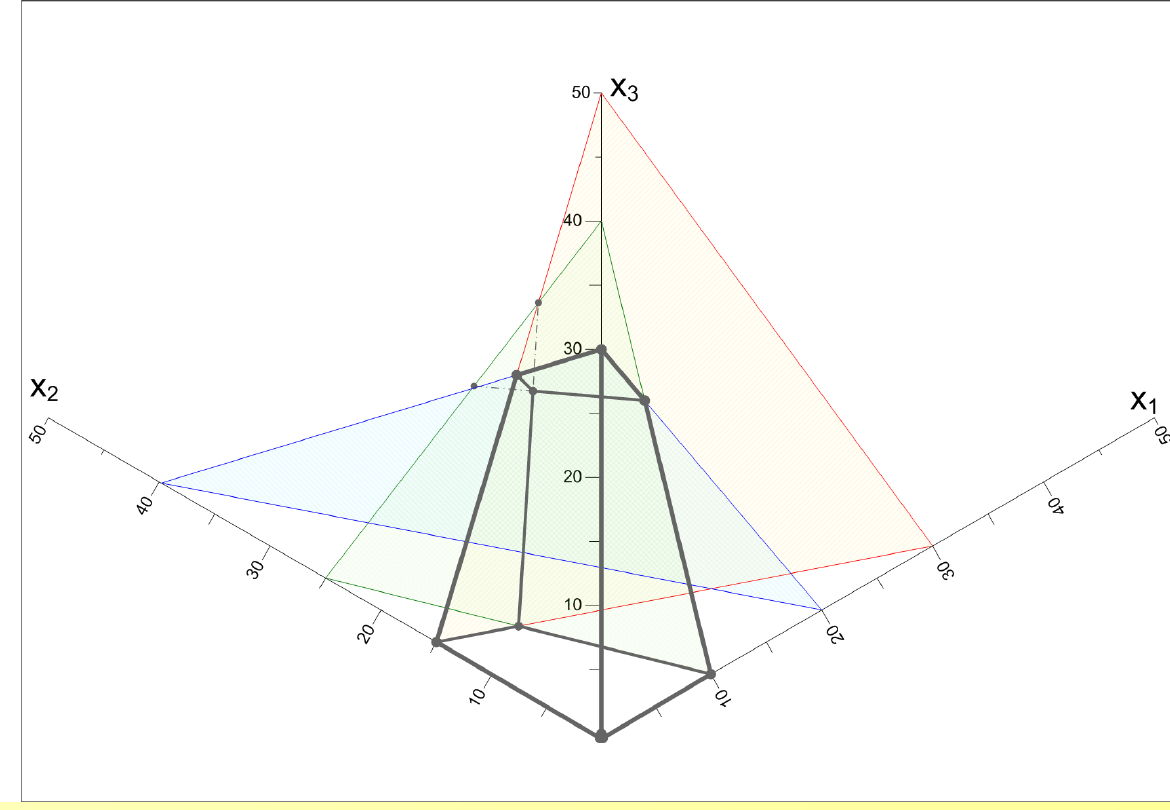
Wygląd obszaru dopuszczalnych rozwiązań od strony początku
układu współrzędnych
46
75*x
1
+ 150*x
2
+ 45*x
3
≤ 2250
120*x
1
+ 60*x
2
+ 80*x
3
≤ 2400
100*x
1
+ 40*x
2
+ 25*x
3
≤ 1000
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0
47

48
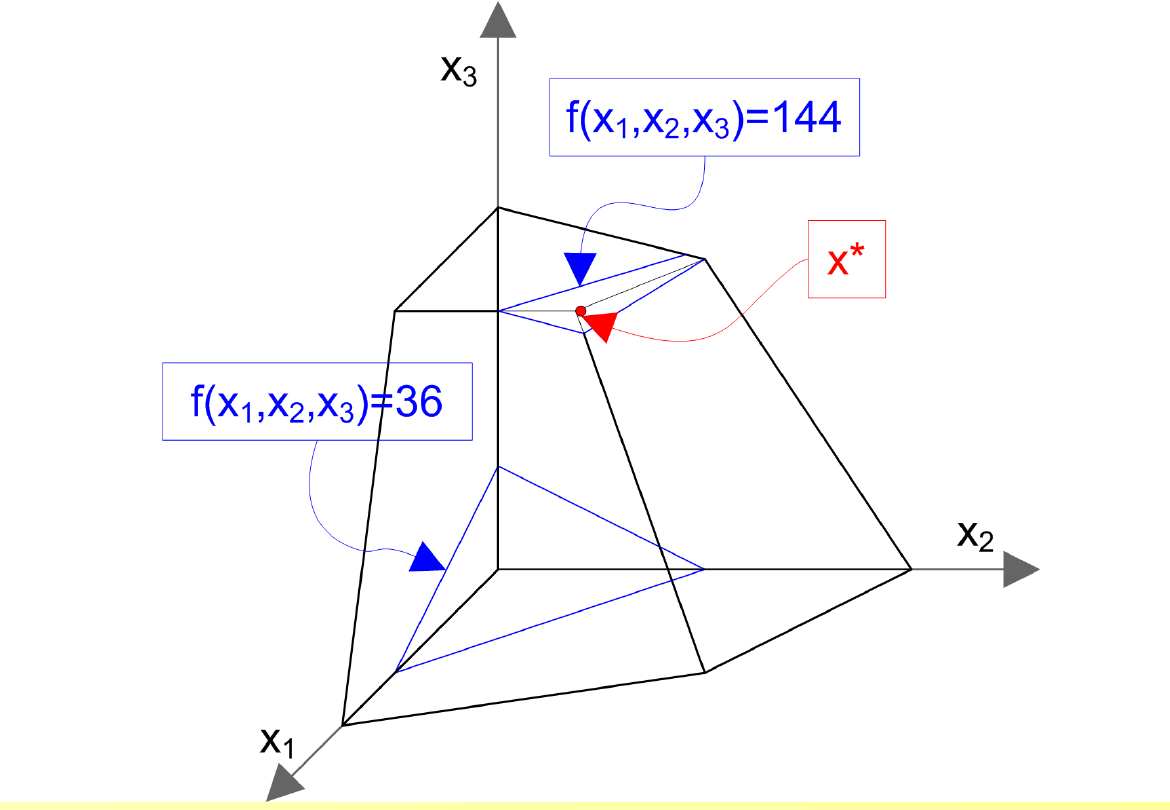
Zagadnienie trójwymiarowe
Model matematyczny zagadnienia:
max f(x) = 8*x
1
+ 9*x
2
+ 18*x
3
15*x
1
+ 5*x
2
+ 6*x
3
≤ 90
3*x
1
+ 6*x
2
+ 4*x
3
≤ 48
x
1
+ x
2
+ 4*x
3
≤ 28
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0
49
max f(x) = 8*x
1
+ 9*x
2
+ 18*x
3
15*x
1
+ 5*x
2
+ 6*x
3
≤ 90
3*x
1
+ 6*x
2
+ 4*x
3
≤ 48
x
1
+ x
2
+ 4*x
3
≤ 28
x
1
≥ 0, x
2
≥ 0, x
3
≥ 0

50
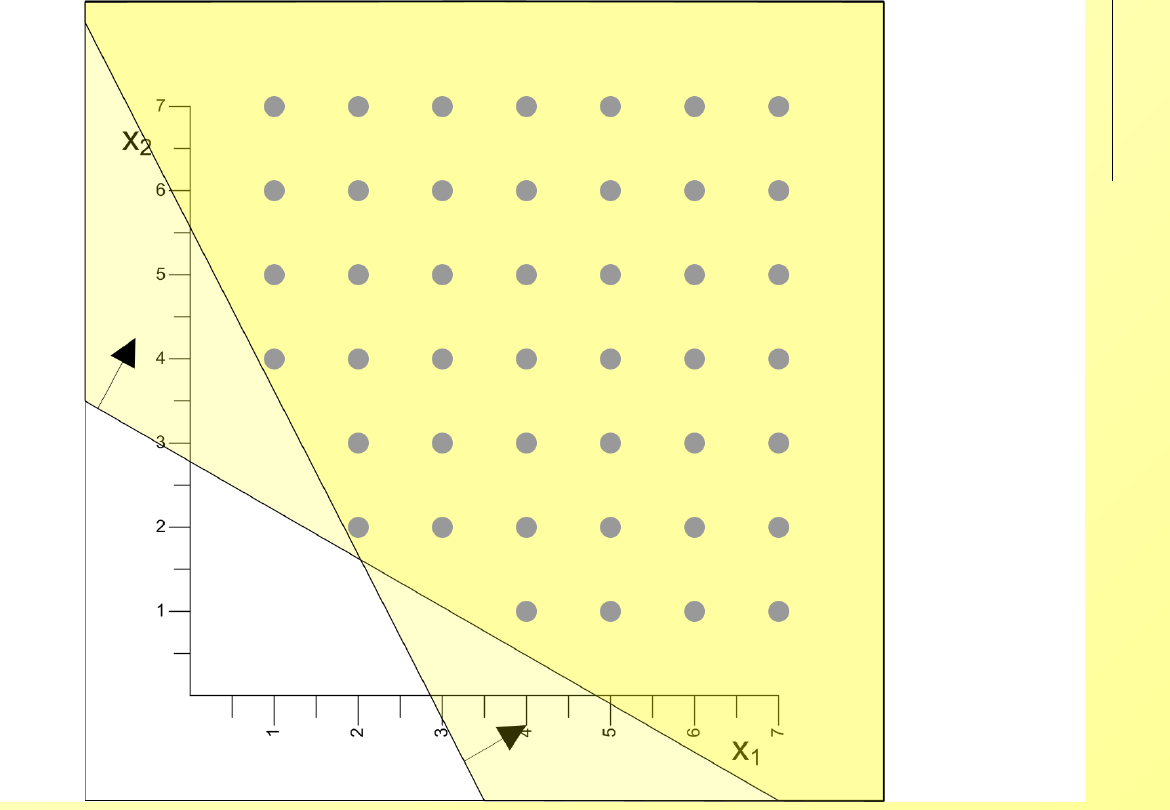
Optymalizacja w liczbach
całkowitych
Zagadnienie wyznaczenia wartości optymalnej w liczbach
całkowitych. Z przypadkiem takim można się spotkać w
odniesieniu do dużych niepodzielnych obiektów typu
samolotów, statków, turbin, zakładów produkcyjnych, w
zagadnieniach transportu towarów.
Najprostszą metodą rozwiązania zagadnienia (dającą się
zastosować wyjątkowo rzadko) może być zaokrąglenie do
całkowitej wartości wyniku optymalizacji prowadzonej bez
wymogu uzyskania wielkości całkowitych.
Większość pozostałych metod wymaga dwuetapowego procesu
rozwiązania zagadnienia
etap pierwszy – wyznaczenie rozwiązania w liczbach ułamkowych,
etap drugi – sprowadzenie rozwiązania ułamkowego do rozwiązania
w liczbach całkowitych.
51
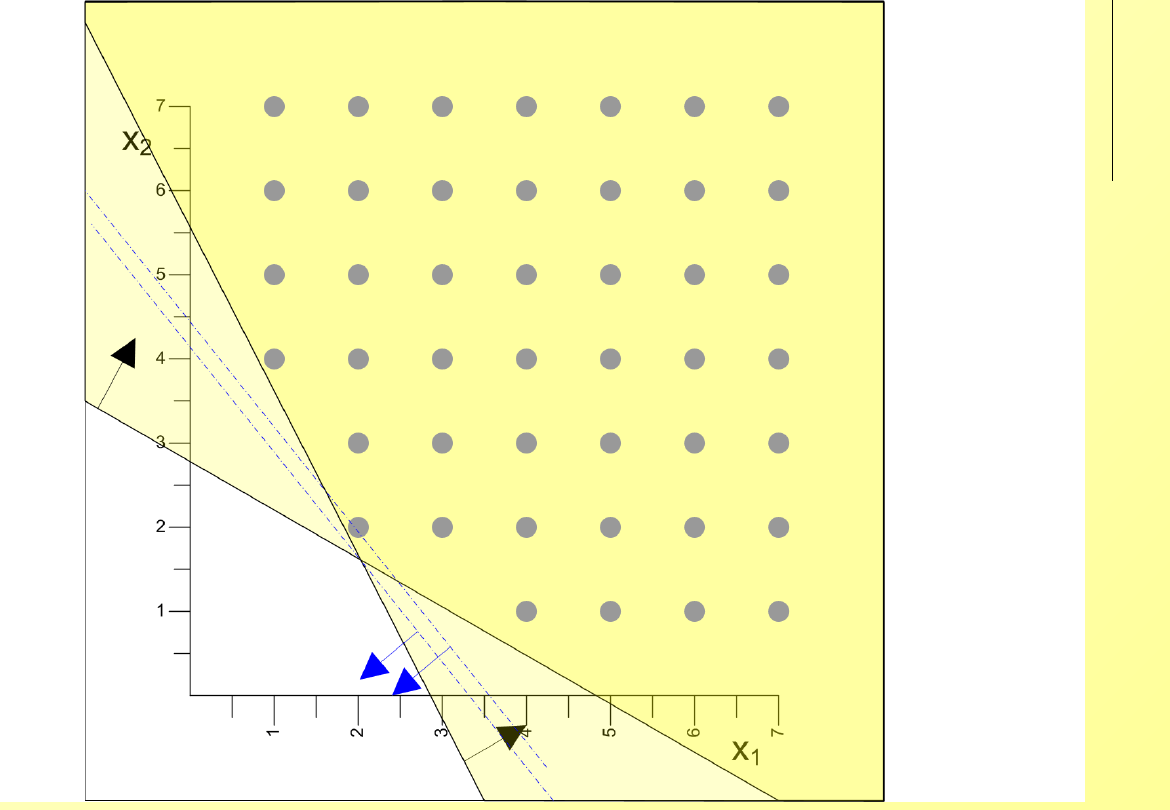
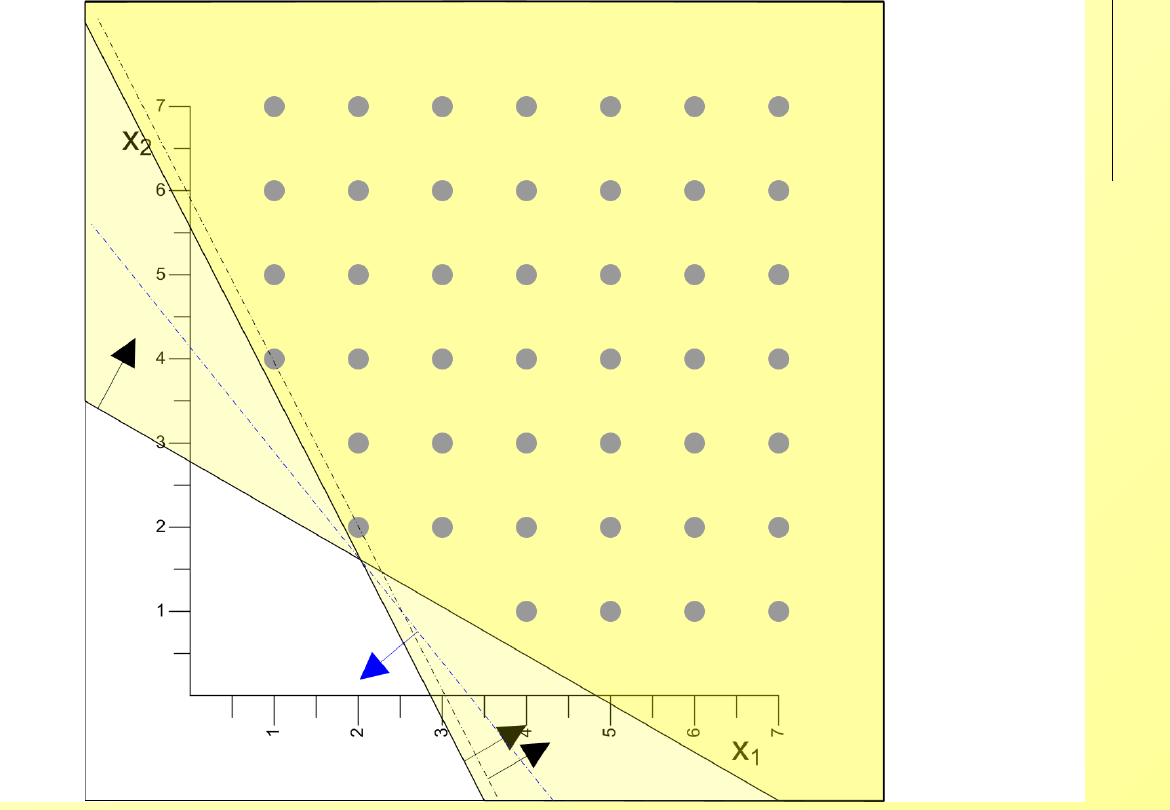
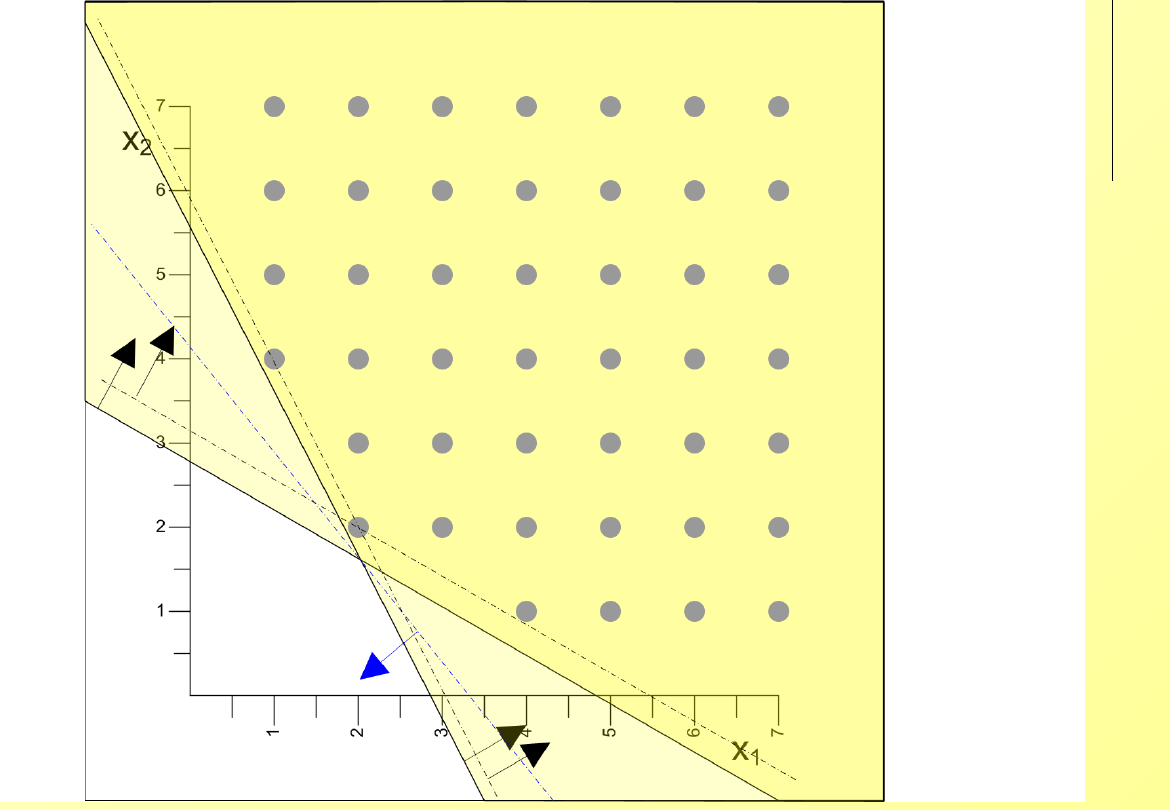
52

53
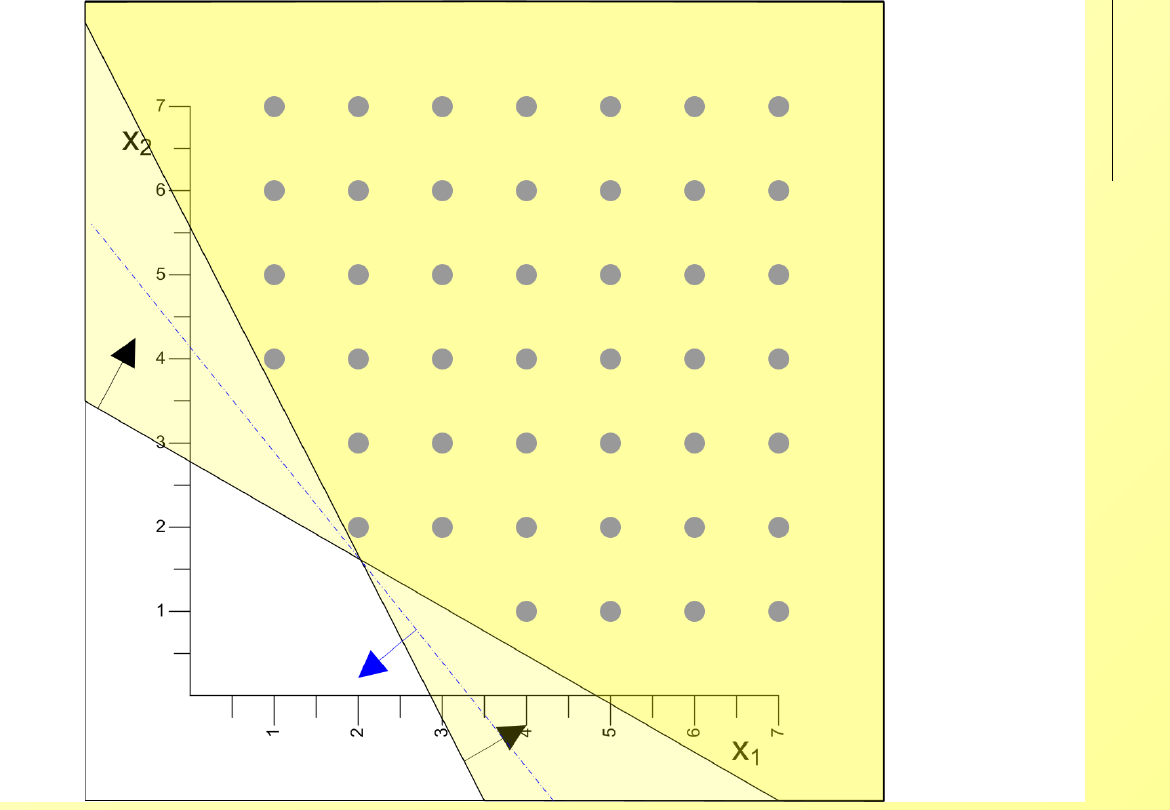
Optymalizacja w liczbach
całkowitych
Metoda A.H.Landa–A.G.Doiga
etap pierwszy – wyznaczenie rozwiązania optymalnego w liczbach
ułamkowych,
etap drugi – przejście do rozwiązania w liczbach całkowitych przez
przesunięcie warstwicy optymalnej w głąb obszaru rozwiązań
dopuszczalnych, aż do uzyskania pierwszego rozwiązania
całkowitego. Przesunięcie wiąże się z uzyskaniem gorszej wartości
funkcji kryterium.
54

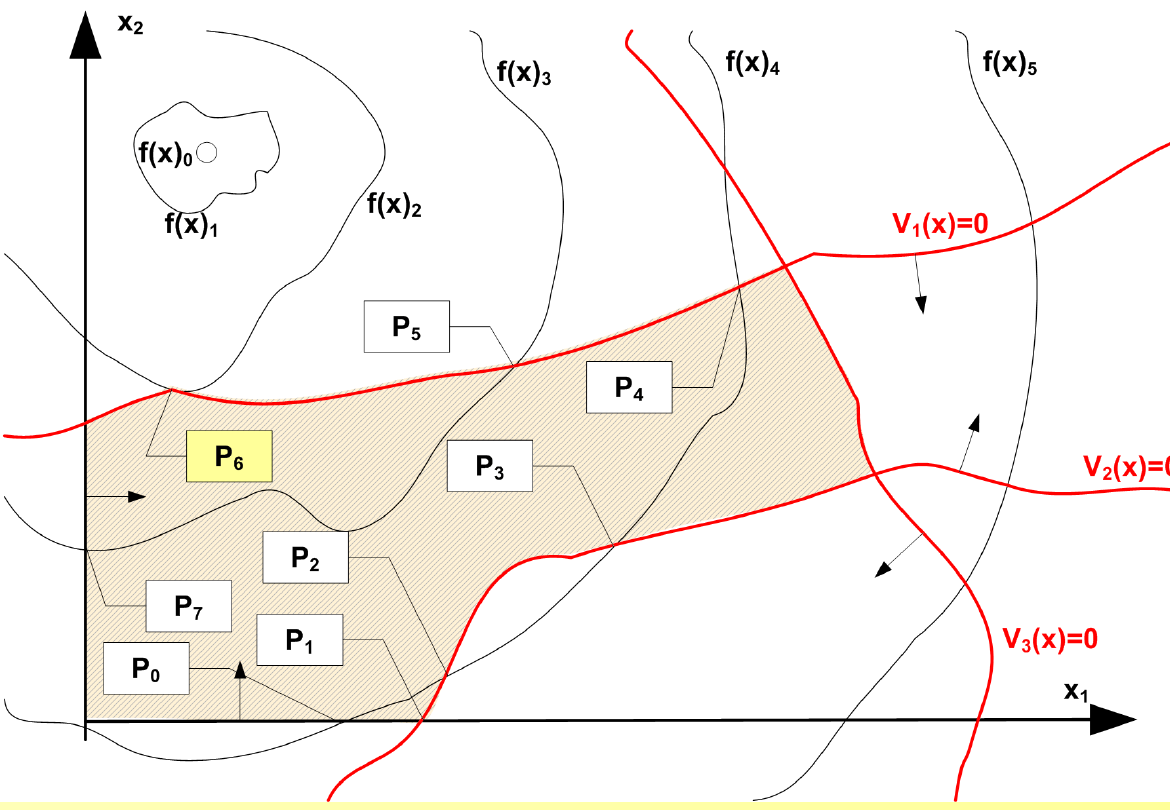
55
Optymalizacja w liczbach
całkowitych
Metoda R.E.Gomory’ego
etap pierwszy – wyznaczenie rozwiązania optymalnego w liczbach
ułamkowych,
etap drugi – dodanie do warunków ograniczających nowego
warunku (nowych warunków) oraz nowej zmiennej (nowych
zmiennych) do zbioru zmiennych decyzyjnych.
56
57

58
Programowanie nieliniowe
59
Programowanie nieliniowe
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
- Slide 48
- Slide 49
- Slide 50
- Slide 51
- Slide 52
- Slide 53
- Slide 54
- Slide 55
- Slide 56
- Slide 57
- Slide 58
- Slide 59
Wyszukiwarka
Podobne podstrony:
BO 03
BO 03
BO WYKLAD 03 2
BO II stacjonarne wykład nr 03
BO WYKLAD 03 2
Poradnik Bo ja jestem, proszę pana, bardzo dobrze wychowana Usenetowy savoir vivre 03 2005
#03 Księga o Światach Duchowych Bo Yin Ra
Fakty nieznane , bo niebyłe Nasz Dziennik, 2011 03 16
[03 PO] Bo Yin Ra Księga o Zaświecie
BO Cw 03 ZT
2019 04 03 14 latce usunięto piersi, bo uznano ją za chłopca! Szokujące eksperymenty na dzieciach w
2010 08 03 Zwolniono ją, bo jeździ na wózku
25 03 2005 gs do bo
2012 01 03 Odchodzę bo jesteś dla mnie za dobry
03 Sejsmika04 plytkieid 4624 ppt
03 Odświeżanie pamięci DRAMid 4244 ppt
podrecznik 2 18 03 05
więcej podobnych podstron