62
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 6, NO. 1, FEBRUARY 2010
H-Infinity State Feedback Control for a Class of
Networked Cascade Control Systems
With Uncertain Delay
Congzhi Huang, Yan Bai, and Xiangjie Liu
Abstract—Based on practical industrial process control, a typ-
ical configuration for networked cascade control systems (NCCSs)
is analyzed. This kind of NCCSs with state feedback controllers,
in which the network-induced delay is uncertain and less than a
sampling period, is studied. The sufficient condition for the stabi-
lizability of the NCCSs without disturbances is proposed, and the
state feedback stabilization control laws are derived via Lyapunov
stability theory and linear matrix inequality (LMI) approach. For
the NCCSs with disturbances, the criterion of its robust asymp-
totically stability is derived and the
-suboptimal state feedback
control laws are designed. The
-optimal state feedback
control laws are also put forward by optimizing a set of LMIs. A
simulation example of a NCCS for the main steam temperature in
a power plant is given to demonstrate the effectiveness of the pro-
posed approaches.
Index Terms—Linear matrix inequality, networked cascade con-
trol system (NCCS), state feedback control, uncertain delay.
I. I
NTRODUCTION
C
ASCADE control (CC), first proposed by Franks and
Worley in [1], is a very effective strategy to improve
control system performance, especially in the presence of dis-
turbances. As it has an inner loop, a CC system has the ability
to quickly attenuate the disturbances in the inner loop, and
the system performance is therefore improved. As a result, the
CC architecture has become one of the most important control
architectures and has found great applications in industrial
process control, such as power plants [2], chemical plants [3],
and so on.
Nowadays, real-time networks are more and more employed
to transmit various information in industrial process control.
Feedback control system wherein the control loops are closed
via real-time networks, is called a networked control system [4]
(NCS for short). One important feature of an NCS is that the
sensor data and control data are all transmitted through real-time
networks, which brings a lot of benefits, such as largely reduced
wiring and system cost, facility of system maintenance and di-
agnostics, and so on. As a result, NCS has found a great number
Manuscript received December 27, 2008; revised August 15, 2009 and Au-
gust 31, 2009. First published November 13, 2009; current version published
February 05, 2010. This work was supported in part by National Natural Sci-
ence Foundation of China under Grant 60974051, in part by the Program for
New Century Excellent Talents in University under Grant NCET-06-0207, and
in part by the Construction Project from Beijing Municipal Commission of Ed-
ucation, Beijing, China. Paper no. TII-09–06–0118.R1.
The authors are with the Department of Automation, North China Electric
Power University, Beijing, 102206, China (e-mail: hcz190@ncepu.edu.cn;
by@ncepu.edu.cn; liuxj@ncepu.edu.cn).
Digital Object Identifier 10.1109/TII.2009.2033589
of applications in industrial process control, and has been the re-
search focus of the control theory academia in the past decades,
see surveys in [5]–[6] and special issues in [7]–[11].
CC system, wherein the control loops are closed via a real-
time network, is called a networked cascade control system [12],
[13] (NCCS for short thereafter). A NCCS is a special kind
of CC system as well as a particular type of NCS, and thus it
has the merits of both of them. Due to these prominent advan-
tages, NCCS has been widely implemented in practical indus-
trial process control for decades. However, the insertion of net-
works into the control loops makes the system analysis and de-
sign become extremely complicated. In a NCCS, there are three
intelligent field devices: a primary sensor, a secondary sensor,
and an actuator. The network may merely exist in either one of
the primary control loop and the secondary control loop, or in
both of them, which depends on the practical configuration since
the controllers can be placed arbitrarily in the three intelligent
field devices [13]. The network-induced delay is unavoidable
while the data packet is transmitted through the network, and the
data packet may be lost, for reasons of reliability. Both of them
are determined by the medium access control methods and the
hardwares adopted. The delay and packet dropout can degrade
the performance of the system, and even make the system un-
stable [14], [15]. Some ideal assumptions under the traditional
CC system theory, such as nondelayed accurate transmission of
the real-time data in the control loops, and the synchronization
among different control components, are no longer true. There-
fore the traditional CC theory must be reevaluated before appli-
cation of NCCSs.
Generally, in a NCCS, due to the uncertainty of the network
transmission and network load, the network-induced delay is
usually uncertain. To deal with the uncertainty, robust
con-
trol is an effective tool to describe and analyze these problems.
Besides, the controllers can be designed directly and conve-
niently in this way, and the complicated tuning procedures will
be omitted. As a result, the robust
control theory is found
in a lot of applications for the analysis and synthesis of NCSs.
The robust stability for an uncertain linear system was studied
in [16], but it only considered a constant delay. In [17], the
NCS with random packet dropout was modeled as a Markovian
jumping linear system, and an
optimal controller was
designed in terms of an
norm performance. Based on the
free weighting matrix method, an
state feedback controller
was developed for a class of NCSs with time-varying but
bounded delays in [18]. In [19], an
controller was derived
by solving a set of LMIs for the communication-constrained
NCSs with random packet dropout. The NCSs with both data
1551-3203/$26.00 © 2009 IEEE
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
HUANG et al.: H-INFINITY STATE FEEDBACK CONTROL FOR A CLASS OF NETWORKED CASCADE CONTROL SYSTEMS WITH UNCERTAIN DELAY
63
Fig. 1. Configuration diagram of a typical NCCS.
packet dropout and network-induced delay were considered in
[20], and an
controller was designed based on multiob-
jective optimization technology. A uniform model for an NCS
was established in [21], taking into account both network and
state quantization. A quantized state feedback
controller
was designed to make the system global and asymptotically
stable. In continuous time domain, the robust
state feed-
back controllers were designed in terms of LMIs for an NCS
with both delay and packet dropout, see [22]–[25]. Based
on delay-dependent approach, a robust
controller was
designed in [26] for a class of uncertain nonlinear NCSs, which
can be represented by a T-S fuzzy model with uncertainties.
However, due to the structural complexity of the CC system,
few papers have ever discussed the application of robust
control in a NCCS. In this paper, the robust
state feedback
control laws for a class of NCCSs, in which the network-induced
delay is uncertain and less than a sampling period, are analyzed
and designed. The rest of the paper is organized as follows: In
Section II, a closed-loop model of the NCCSs is established in
discrete time domain by state space method. Based on Lyapunov
stability theory and LMI approach, the sufficient condition for
the robust asymptotically stability of the NCCSs without dis-
turbances is derived in Section III, and the state feedback stabi-
lization control laws are also developed. Section IV is concerned
with the robust asymptotically stability of the NCCSs with dis-
turbances, and the -optimal state feedback
control laws
are designed. A simulation example considering power plant
cascade steam temperature is presented in Section V to verify
the effectiveness of the proposed methods. Conclusions are fi-
nally given in Section VI, and the future research directions are
also pointed out.
Notation:
is the identity matrix with appropriate dimen-
sions,
represents the induced matrix 2-norm. The notation
(respectively,
) for
means that
is a
real symmetric positive-definite (respectively, negative-definite)
matrix.
II. M
ODELING OF
NCCS
Based on practical industrial process control, four typical
configurations of NCCSs were put forward and analyzed in
[13]. The second type of NCCS, so called Type II NCCS is
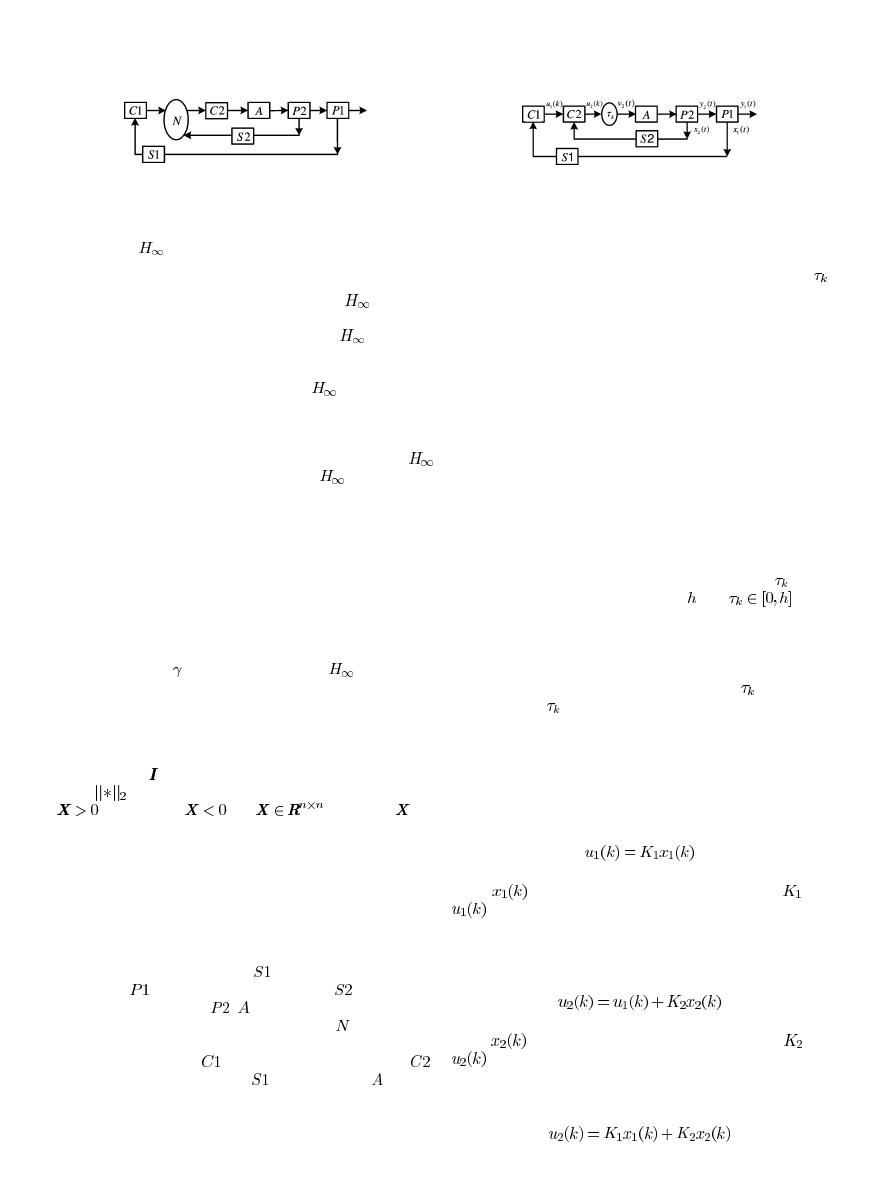
studied here, and the configuration diagram is shown in Fig. 1.
In Fig. 1, the primary sensor
is connected with the pri-
mary plant
, while the secondary sensor
is combined
with the secondary plant
.
is the actuator installed in the
field connected with the secondary plant, and
is a real-time
network, which may be industrial Ethernet, or some fieldbus.
The primary controller
, and the secondary controller
,
are placed in the primary sensor
and the actuator
, respec-
tively. The primary controller sends out the control command
and the secondary sensor sends out the state variables of the sec-
ondary plant via the same network in most cases, and therefore
Fig. 2. Equivalent block diagram of typical NCCS in Fig. 1.
the two network-induced delays can be equivalently placed at
the input of the secondary controller. Since the secondary con-
troller considered here is linear, the network-induced delay
can be viewed as only existing between the secondary controller
and the actuator, as shown in Fig. 2.
The type of NCCS depicted in Fig. 2 is studied hereinafter,
and for the convenience of narration, the following assumptions
are made beforehand: 1) The state variables of the primary and
secondary plants are both available for the corresponding con-
trollers, respectively. 2) Both the sensors are time-driven, which
means that they periodically sample the states of the plants and
send them to the corresponding controllers. 3) Both the con-
trollers are event-driven. The primary controller computes the
control output and sends it to the secondary controller on ob-
taining the latest samples of the primary plant states. The sec-
ondary controller computes the control command and sends it
to the actuator as soon as it receives the latest samples of the
secondary plant and the command from the primary controller.
4) The actuator is also event-driven. It actuates the plants once
it receives the latest control command. 5) The delay
is un-
certain and less than a sampling period , i.e.,
. Data
packet is transmitted in single packet without any loss. 6) The
sampling times of the sensors, the transmission time from the
primary sensor to the primary controller as well as from the sec-
ondary controller to the actuator, and the computational time of
the controllers, are all negligible or lumped into
for they are
much less than
. 7) The gains of the primary and secondary
sensors are both 1, but if needed in the analysis, the dynamics
of the two measurement components could be included in the
primary and secondary plants, respectively. The gain of the ac-
tuator is also assumed to be 1.
With the reference to be zero, the primary controller is a static
state feedback controller. It is given by
(1)
where
is the state variable of the primary plant.
and
are the state feedback gain matrix and the control output
of the primary controller, respectively. The static state feedback
is also adopted in the secondary controller, which can be de-
scribed by
(2)
where
is the state variable of the secondary plant.
and
are the state feedback gain matrix and the control output
of the secondary controller, respectively.
Combining (1) and (2), results in
(3)
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
64
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 6, NO. 1, FEBRUARY 2010
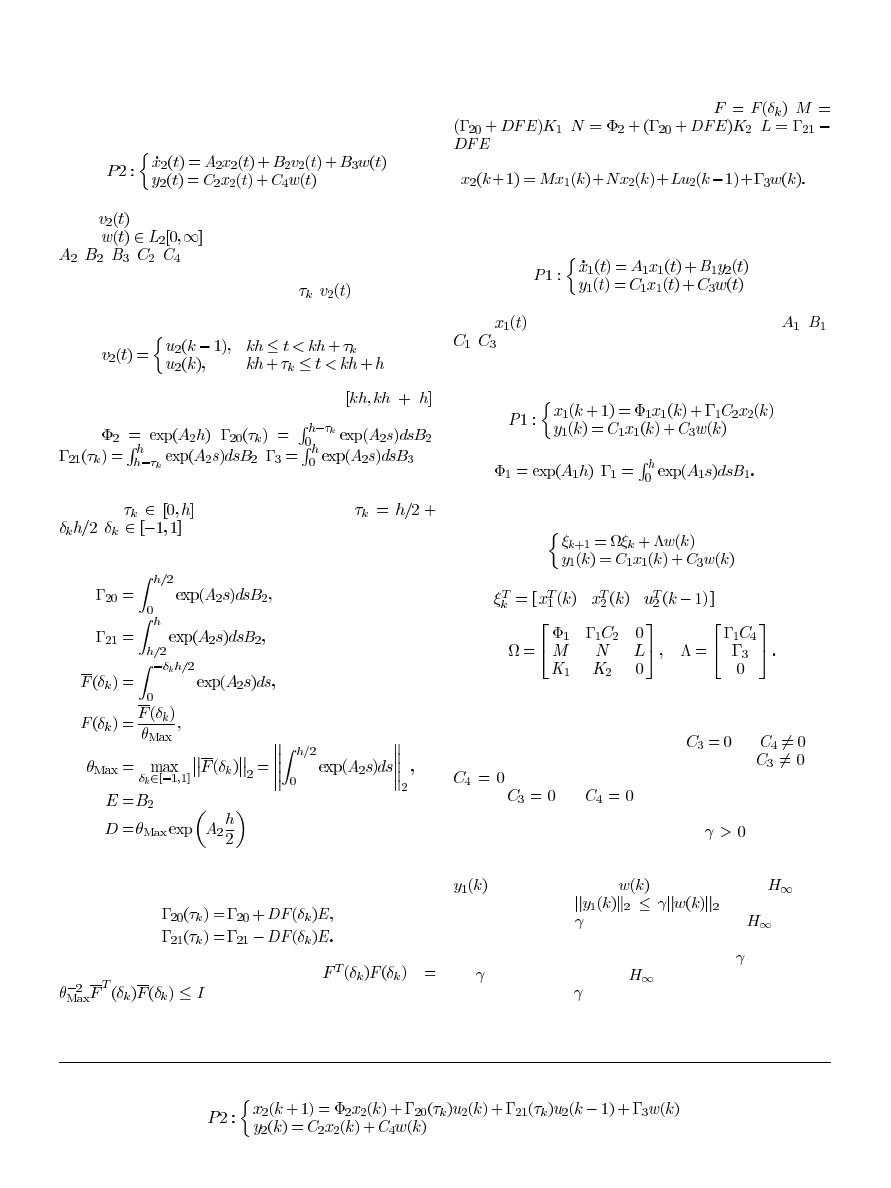
The secondary plant is continuous-time linear time invariant,
and its state space equations are expressed as
(4)
where
is the control command actually received by the ac-
tuator.
is the disturbance with limited energy.
,
,
,
,
are constant matrices with appropriate di-
mensions.
In view of the network-induced delay
,
is a piecewise
function shown as
.
(5)
Discretizing (4) in the sampling period
,
yields equation (6) shown at the bottom of the page,
where
,
,
,
.
Next we transform the uncertainty of the delay into the uncer-
tainty of the coefficient matrices. The network-induced delay is
subject to
. It can be represented as
,
.
Let
then
In addition, it is easy to deduce that
.
For the convenience of analysis, denote
,
,
,
, then (6) can be rewritten as
(7)
The primary plant is also continuous-time linear time in-
variant, which is described by
(8)
where
is the state variable of the primary plant.
,
,
,
are constant matrices with appropriate dimensions.
After discretization of (8), we obtain its discrete time state
space representation
(9)
where
,
Combining (3), (6), (7) and (9), the closed-loop model of the
NCCS is presented as follows:
(10)
where
Remark 1:
In the closed-loop model of the NCCS established
as (10), both the inner loop disturbance and the outer loop dis-
turbance are considered. In addition, if
and
, the
disturbance only exists in the inner loop, while if
and
, the disturbance only appears in the outer loop. Spe-
cially, if
and
, there are no disturbances in the
NCCS.
Definition 1:
Given a certain constant
, if there exist
state feedback control laws (1) and (2), which make the NCCS
(10) robust asymptotically stable, and the primary plant output
and the disturbance
are subject to the
norm
bounded constraint
under zero initial
conditions, then the -suboptimal state feedback
stabiliza-
tion control laws exit for the closed-loop NCCS(10), and the
disturbance attenuation degree of the system is . Furthermore,
the -optimal state feedback
control laws can be obtained
by minimization of .
(6)
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.

HUANG et al.: H-INFINITY STATE FEEDBACK CONTROL FOR A CLASS OF NETWORKED CASCADE CONTROL SYSTEMS WITH UNCERTAIN DELAY
65
III. R
OBUST
A
SYMPTOTICALLY
S
TABILITY OF
NCCS W
ITHOUT
D
ISTURBANCES
In order to derive the sufficient conditions for the robust
asymptotically stability of NCCS (10) without disturbances,
the following two lemmas are vital.
Lemma 1:
[27] Given constant matrices
,
, and
,
where
,
, then
holds
The following lemma is used to deal with the uncertainties of
the network-induced delays in a NCCS.
Lemma 2:
[28] Given constant matrices
,
, and
,
where
, for any
subject to
,
holds if there exists a constant
scalar
satisfying
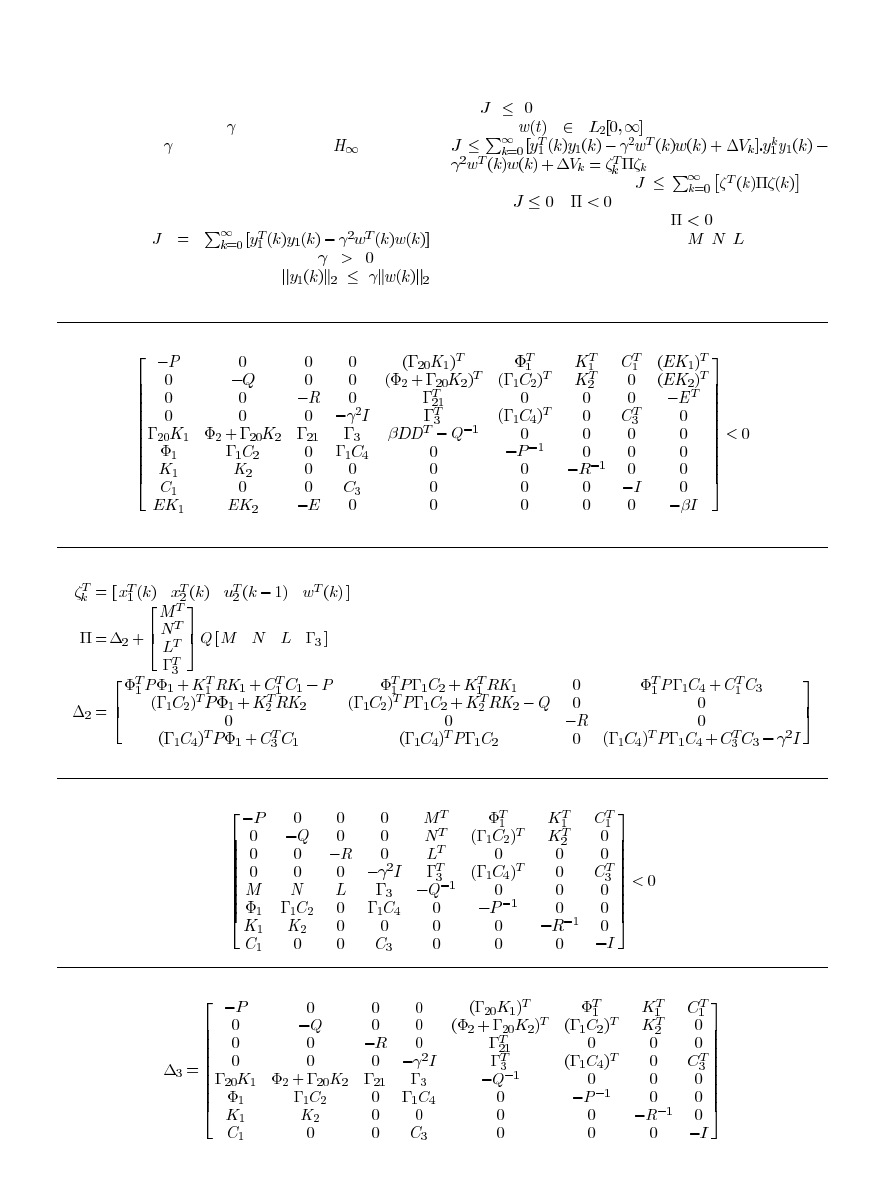
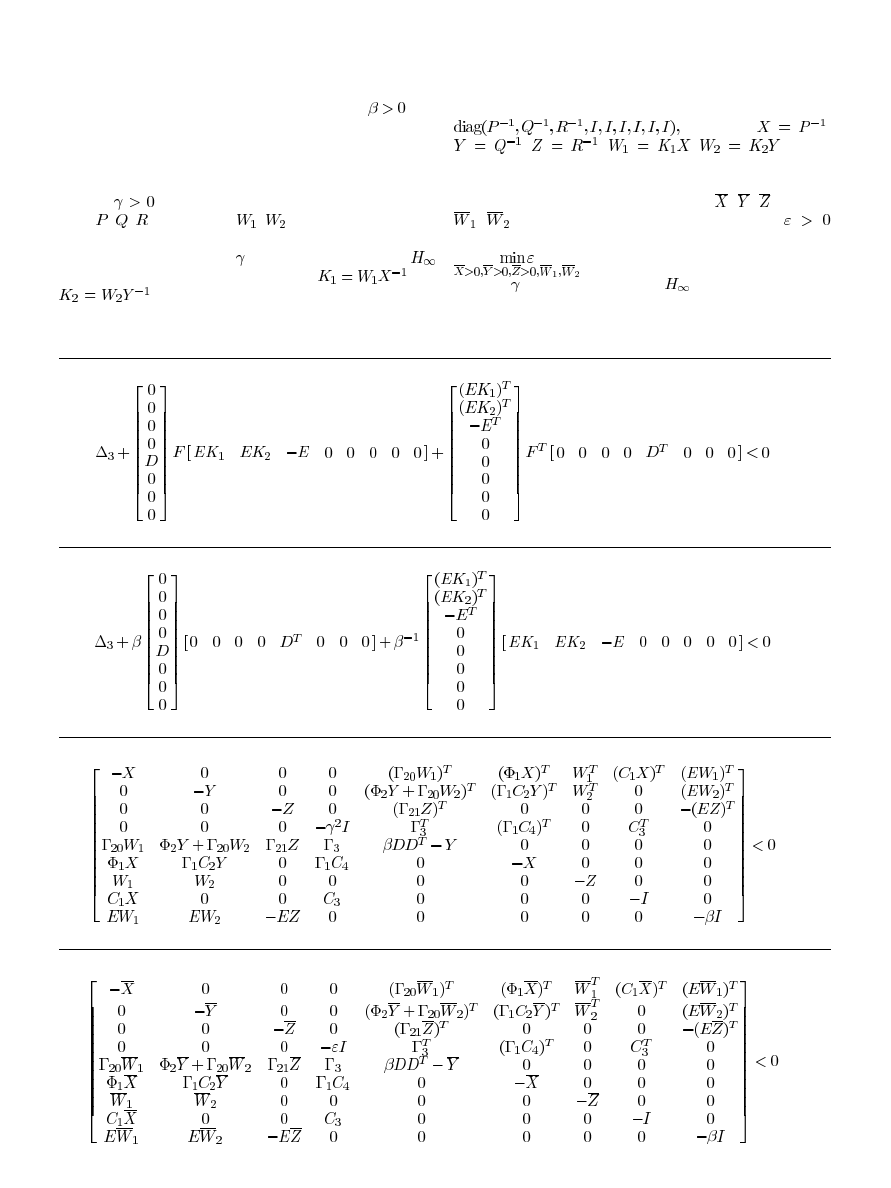
Theorem 1:
For the NCCS (10) without disturbances
, if there exist symmetric positive-definite matrices
,
,
,
and a scalar
such that the following inequality holds
in (11) shown at the bottom of the page, then the closed-loop
NCCS (10) with the state feedback control laws (1) and (2) is
said to be robust asymptotically stable.
Proof:
Define a Lyapunov functional as
(12)
Taking the derivative of the Lyapunov functional along the
solution of (10), we obtain
where
shown in (13) at the
bottom of the page.
In order to ensure the asymptotically stability of the closed-
loop system, we must have
, which results in
.
By Lemma 1, the following is true shown in (14) at the bottom
of the page.
Applying Lemma 1 twice, (15) is equivalent to (14)
(15)
(11)
(13)
(14)
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.

66
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 6, NO. 1, FEBRUARY 2010
Substituting
,
,
into (15), and assuming that the first
equation shown at the bottom of the page, (15) can be rewritten
as
(16)
By Lemma 2, (16) holds if there exists a constant
such
that shown in (17) at the bottom of the page.
Incorporating the first two terms of (17), and applying Lemma
1, we can obtain (11). That completes the proof.
Corollary 1:
If there exist symmetric positive-definite ma-
trices
,
,
, and
,
with appropriate dimensions, such
that shown in (18) at the bottom of the page, then the NCCS
closed-loop system (10) without disturbances is said to be ro-
bust asymptotically stable. In addition, the state feedback stabi-
lization control laws are given by
(19)
Proof:
By Theorem 1, if there exist symmetric posi-
tive-definite matrices
,
,
satisfying (11), the NCCS
closed-loop system(10) without disturbances is asymptoti-
cally stable. Pre-multiplying and post-multiplying (11) by
, and letting
,
,
,
,
yields (18).
As a result, the state feedback control gains are computed as
, and
.
IV. R
OBUST
A
SYMPTOTICALLY
S
TABILITY OF
NCCS W
ITH
D
ISTURBANCES
The robust asymptotically stability of the NCCS closed-loop
system (10) with disturbances is considered hereinafter.
Theorem 2:
For a given constant
, if there exist sym-
metric positive-definite matrices
,
,
, and a constant
such that the following inequality holds as shown in (20) at the
bottom of the next page, then the NCCS closed-loop system (10)
(17)
(18)
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
HUANG et al.: H-INFINITY STATE FEEDBACK CONTROL FOR A CLASS OF NETWORKED CASCADE CONTROL SYSTEMS WITH UNCERTAIN DELAY
67
with disturbances is said to be asymptotically stable with distur-
bance attenuation degree as . The state feedback control laws
(1) and (2) are the -suboptimal state feedback
control laws
for the system.
Proof:
By choosing a Lyapunov functional as (12),
under Theorem 1, the closed-loop system (10) is asymp-
totically stable if (20) holds. Define a performance index
functional as:
.
If the disturbance attenuation degree is
, the fol-
lowing condition must be satisfied:
,
i.e.,
. For the NCCS with any nonzero disturbance
satisfying
and zero initial conditions,
shown in the second equation
at bottom of the page, yields
and
therefore,
if
.
Applying Lemma 1 four times to
, yields (21) shown
at the bottom of the page. Substituting
,
,
into (21), and
denote the fourth equation shown at the bottom of the page, (21)
can be rewritten as (22) shown at the bottom of the next page.
(20)
(21)
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
68
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 6, NO. 1, FEBRUARY 2010
By Lemma 2, (22) holds if there exists a constant
such
that the following is true in (23) shown at the bottom of the page.
Combining the first two terms of (23), and applying Lemma 1,
results in (20).
Corollary 2:
For the NCCS (10) with disturbances, given a
constant
, if there exist symmetric positive-definite ma-
trices
,
,
, and matrices
,
with appropriate dimen-
sions, satisfying the following inequality shown in (24) at the
bottom of the page, then the -suboptimal state feedback
control laws exist, and the gain matrices are
, and
.
Proof:
Premultiplying and postmultiplying (20) by
and letting
,
,
,
,
, (24) is
available and the gain matrices are computed as in Corollary 2.
Corollary:
For the NCCS closed-loop system (10), if there
exist symmetric positive-definite matrices
,
,
, matrices
,
with appropriate dimensions, and a scalar
such that the following optimization problem is feasible:
shown in (25) at the bottom of the page.
Then the -optimal state feedback
control laws exist, and
(22)
(23)
(24)
(25)
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
HUANG et al.: H-INFINITY STATE FEEDBACK CONTROL FOR A CLASS OF NETWORKED CASCADE CONTROL SYSTEMS WITH UNCERTAIN DELAY
69
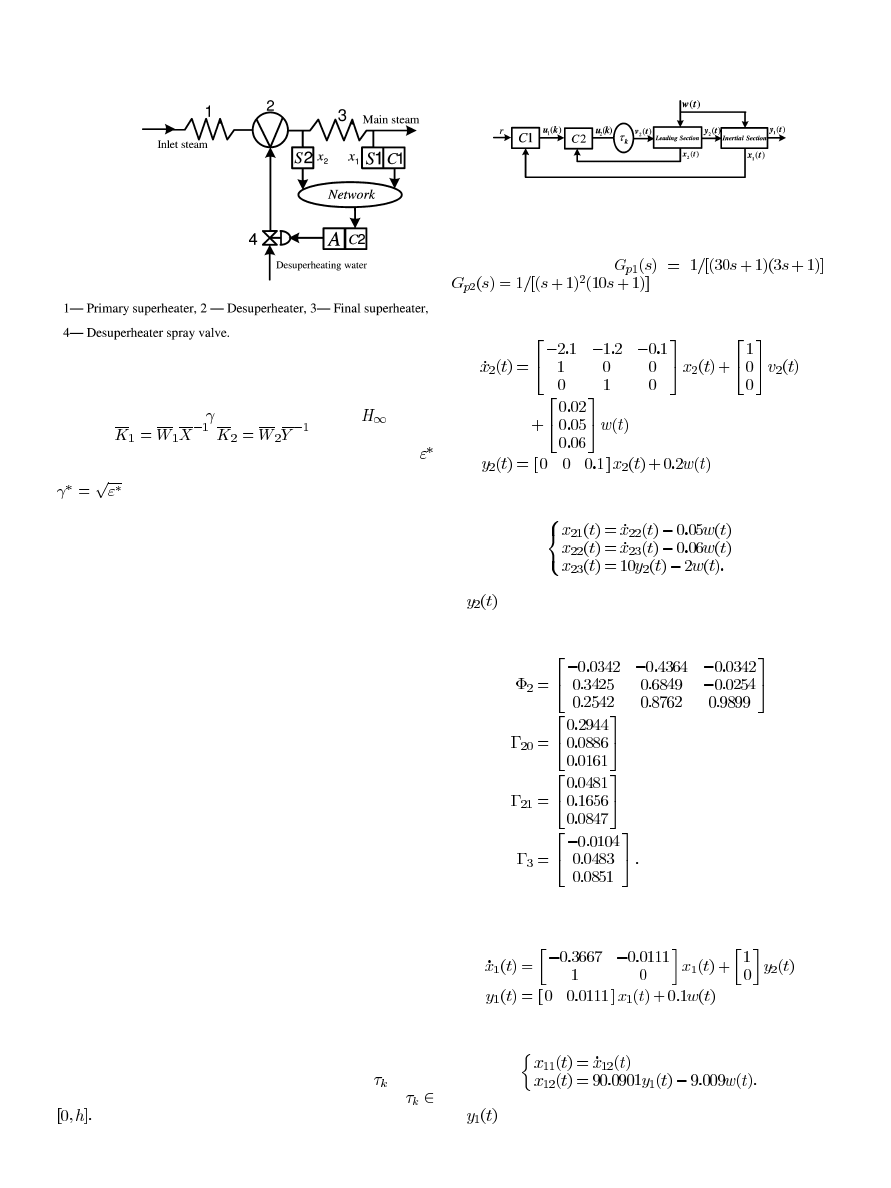
Fig. 3. Schematic diagram of NCCS for main steam temperature.
the gain matrices of the -optimal state feedback
control
laws are:
,
.
By solving optimization problem (25), the optimal solution
is available, and the minimum disturbance attenuation degree is
.
V. S
IMULATION
E
XAMPLES
In a power plant boiler-turbine system, the superheater is an
important part of the steam generation process, where steam is
superheated before entering the turbine that drives the gener-
ator. Proper control of the superheated steam temperature is ex-
tremely important to ensure the overall efficiency and safety of
the power plant. The attemperator is an effective means of low-
ering the temperature of the steam.
In the process, two time constants are associated with the
superheater. One represents the time taken for changes in the
firing rate to affect the steam temperature, the other is the time
taken for the steam and water mixture leaving the attemperator
to appear at the outlet of the final superheater. They are respec-
tively called the leading section and the inertial section. Because
of the long time constants associated with the superheater, the
single-loop control by measuring the temperature of the steam
leaving the final superheater, and modulating the flow of cooling
water to the spray attemperator, would produce excessive devi-
ations in temperature.
These difficulties are addressed by the application of a CC
system as shown in Fig. 3. The temperature of the steam leaving
the secondary superheater is measured and fed to a controller.
In this controller the measured-value signal is compared with a
fixed desired-value signal and the controller’s output forms the
desired-value input for a secondary controller. The secondary
controller compares this desired-value signal with a measure-
ment representing the temperature of the steam immediately
after the spray-water attemperator. The real-time information
in the both control loops are transmitted via the same commu-
nication network with a sampling period of 1 s. Assume the
two network-induced delays are both equivalent to
, which
is time-varying and not longer than a sampling period, i.e.,
And therefore, Fig. 3 can be equivalently transformed to
Fig. 4.
Fig. 4. Block diagram of NCCS for main steam temperature.
It is assumed that the transfer functions of the inertial
and leading sections are:
,
, respectively.
The state-space representation of the leading section is de-
scribed by
where the state variables of the leading section are defined as
is the output of the leading section, which is also the
leading section outlet steam temperature.
After discretization, the following coefficents are available:
The state-space representation of the inertial section is written
as
where the state variables of the inertial section are denoted as
is the output of the inertial section, which is also the
main steam temperature.
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
70
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 6, NO. 1, FEBRUARY 2010
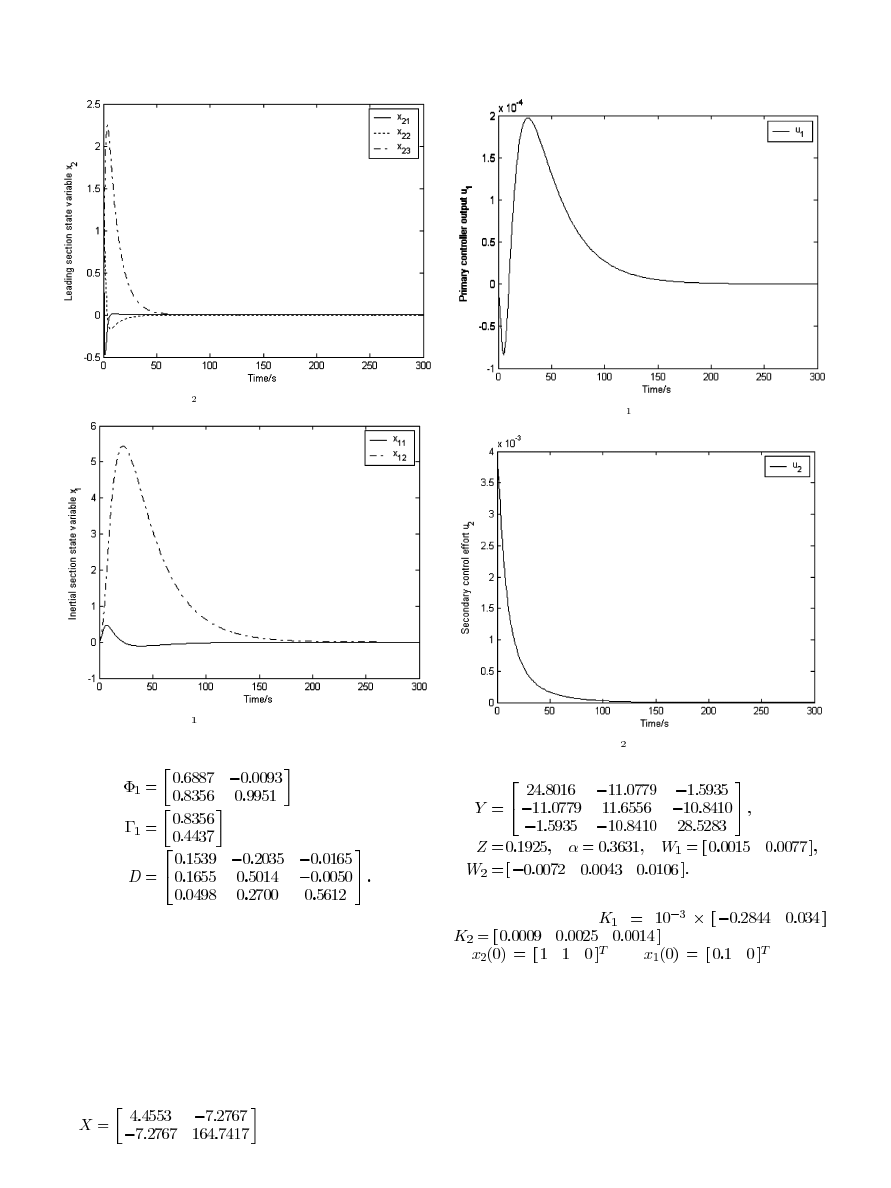
Fig. 5. State response of
x in NCCS without disturbances.
Fig. 6. State response of
x in NCCS without disturbances.
By discretization, the following coefficients are obtained:
The state feedback control laws for the NCCS without and
with disturbances, will be designed according to the corollaries
proposed above by using the LMI toolbox in MATLAB, respec-
tively, and the state responses of the inertial and leading sec-
tions will be presented for the system under the given initial
conditions.
A. State Feedback Stabilization Control Laws for NCCS
Without Disturbances
For the NCCS without disturbances, the feasible solution of
(18) can be computed as follows:
Fig. 7. Primary controller output
u in NCCS without disturbances.
Fig. 8. Secondary control effort
u in NCCS without disturbances.
Therefore, the gain matrices of the state feedback stabiliza-
tion control laws are:
,
. Given the initial conditions
as
, and
, the state
responses of the leading and inertial sections are presented as
Figs. 5 and 6, respectively.
As can be seen clearly from the figures, the NCCS closed-
loop system without disturbances is asymptotically stable. The
inner loop is much faster than the outer loop. The states of the
leading section can reflect the response tendency in advance,
resulting in the convergence of the final inertial section output.
This effect can also be reflected by Figs. 7 and 8, where the
control effort in the attemperator offers a quick response, under
the set-point coming from the primary controller output.
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
HUANG et al.: H-INFINITY STATE FEEDBACK CONTROL FOR A CLASS OF NETWORKED CASCADE CONTROL SYSTEMS WITH UNCERTAIN DELAY
71
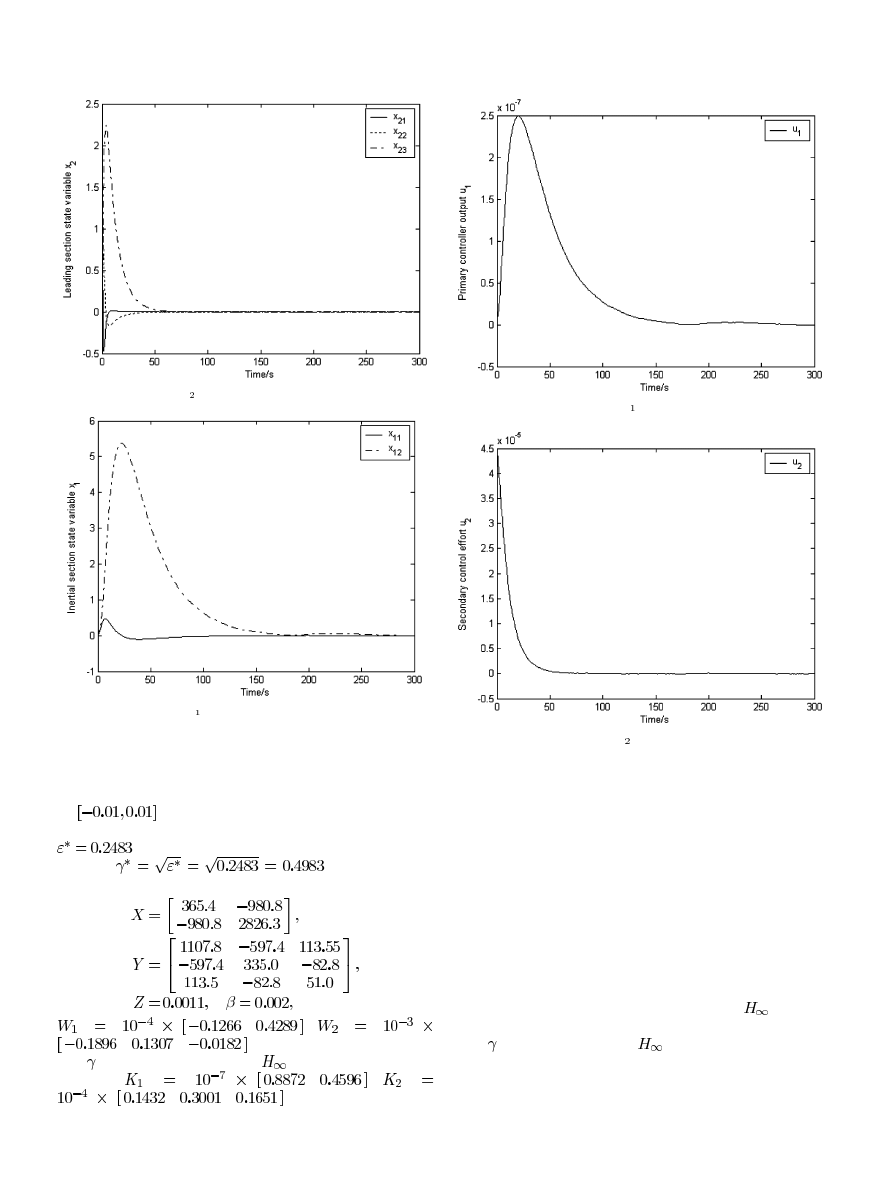
Fig. 9. State response of
x in NCCS with disturbances.
Fig. 10. State response of
x in NCCS with disturbances.
B. State Feedback Stabilization Control Laws for NCCS With
Disturbances
It is assumed that the disturbance is randomly distributed
in
for the NCCS with disturbances, and by
solving the optimization problem(25), the optimal solution is
, and therefore the minimal disturbance attenuation
degree is
. The matrices are
computed as follows:
,
.
The
gain
matrices
of
the
-optimal state feedback
controllers are com-
puted as
,
. Under the same ini-
tial conditions as the previous case, the state responses of the
leading and inertial sections are given in Figs. 9 and 10.
Fig. 11. Primary controller output
u in NCCS with disturbances.
Fig. 12. Secondary control effort
u in NCCS with disturbances.
As can be seen clearly, the NCCS closed-loop system with
disturbances can still be asymptotically stable. The disturbance
imposed on the NCCS is effectively attenuated. The states of
the leading section converge to zeros within 50 s. Similar effect
with the former case can also be observed from Figs. 11 and 12,
showing the control effort in the attemperator and its set-point
under these disturbances.
VI. C
ONCLUSION
Based on Lyapunov stability theory and LMI approach, the
sufficient conditions for the asymptotically stability of a class of
NCCSs with and without disturbances are derived, taking into
account the uncertain delay. The state feedback
stabiliza-
tion control laws for the NCCSs without disturbances, as well
as the -optimal state feedback
control laws for the NCCSs
with disturbances are designed, respectively. By solving feasi-
bility and optimization problems of LMIs, the two controllers
can be obtained simultaneously at one time without any trou-
blesome tuning procedures. Simulation examples are given to
show the effectiveness of the proposed approaches. However,
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
72
IEEE TRANSACTIONS ON INDUSTRIAL INFORMATICS, VOL. 6, NO. 1, FEBRUARY 2010
the states of the plants are not always available, and the output
feedback control is often used in practical engineering. How
to design output feedback control laws such that the NCCS is
asymptotically stable and has a prescribed
performance, is
the future research direction.
A
CKNOWLEDGMENT
The authors are extremely grateful to the anonymous re-
viewers and the editors of this journal for their valuable
suggestions in improving the quality of the paper.
R
EFERENCES
[1] R. G. Franks and C. W. Worley, “Quantitive analysis of cascade con-
trol,” Ind. Eng. Chem., vol. 48, no. 6, pp. 1074–1079, 1956.
[2] M. Xu, S.-Y. Li, and W.-J. Cai, “Cascade generalized predictive control
strategy for boiler drum level,” ISA Transactions, vol. 44, no. 3, pp.
399–411, Jul. 2005.
[3] T. M. Teo, S. Lakshminarayanan, and G. P. Rangaiah, “Performance
assessment of cascade control systems,” J. Inst. Eng., vol. 45, no. 6, pp.
27–38, 2005.
[4] W. Zhang, M. S. Branicky, and S. M. Phillips, “Stability of networked
control system,” IEEE Control Syst. Mag., vol. 21, no. 1, pp. 84–99,
Feb. 2001.
[5] T. C. Yang, “Networked control system: A brief survey,” IEE Proc.
Control Theory Appl.
, vol. 153, no. 4, pp. 403–412, Jul. 2006.
[6] J. P. Hespanha, P. Naghshtabrizi, and Y.-G. Xu, “A survey of recent
results in networked control systems,” Proc. IEEE, vol. 95, no. 1, pp.
138–162, Jan. 2007.
[7] L. G. Bushnell, “Networks and control,” IEEE Control Syst. Mag., vol.
21, no. 1, pp. 21–22, Feb. 2001.
[8] P. Antsaklis and J. Baillieul, “Guest editorial special issue on net-
worked control systems,” IEEE Trans. Autom. Control, vol. 49, no. 9,
pp. 1421–1423, Sep. 2004.
[9] P. Antsaklis and J. Bailliful, “Special issue on technology of networked
control systems,” Proc. IEEE, vol. 95, no. 1, pp. 5–8, Jan. 2007.
[10] T. J. Koo and S. Sastry, “Special issue on networked embedded hybrid
control systems,” Asian J. Control, vol. 10, no. 1, pp. 1–2, Jan. 2008.
[11] N. H. El-Farra and P. Mhaskar, “Special issue on control of networked
and complex process systems,” Comput. Chem. Eng., vol. 32, no. 9, pp.
1963–1963, Sep. 2008.
[12] Y. Bai and C.-Z. Huang, “Analysis and modeling of a class of net-
worked cascade control systems,” (in Chinese) Inf. Control, vol. 36,
no. 3, pp. 273–277, Jun. 2007.
[13] C.-Z. Huang, Y. Bai, and X.-L. Li, “Fundamental issues in networked
cascade control systems,” in Proc. IEEE Int. Conf. Autom. Logistics,
Qingdao, China, Sep. 2008, pp. 3014–3018.
[14] T. J. Harris, C. T. Seppala, and L. D. Desborough, “A review of perfor-
mance monitoring and assessment techniques for univariate and mul-
tivariate control systems,” J. Process Control, vol. 9, no. 1, pp. 1–17,
Feb. 1999.
[15] J. Yu and S.-J. Qin, “Statistical MIMO controller performance moni-
toring. Part I: Data-driven covariance benchmark,” J. Process Control,
vol. 18, no. 3-4, pp. 277–296, Mar. 2008.
[16] X. Li and C. E. de Souza, “Delay-dependent robust stability and sta-
bilization of uncertain linear delay systems: A linear matrix inequality
approach,” IEEE Trans. Autom. Control, vol. 42, no. 8, pp. 1144–1148,
Aug. 1997.
[17] P. Seiler and R. Sengupta, “An
H approach to networked control,”
IEEE Trans. Autom. Control
, vol. 50, no. 3, pp. 356–364, Mar. 2005.
[18] H. Zhao, M. Wu, G.-P. Liu, and J.-H. She, “H-infinity control for net-
worked control systems (NCS) with time-varying delays,” J. Control
Theory Appl.
, vol. 3, no. 2, pp. 157–162, 2005.
[19] H. Ishii, “
H
control with limited communication and message
losses,” Syst. Control Lett., vol. 57, no. 4, pp. 322–331, Apr. 2008.
[20] Y.-L. Wang and G.-H. Yang, “
H controller design for networked
control systems via active-varying sampling period method,” Acta Au-
tomatica Sinica
, vol. 34, no. 7, pp. 814–818, Jul. 2008.
[21] C. Peng and Y.-C. Tian, “Networked
H control of linear systems
with state quantization,” Inf. Sci., vol. 177, no. 24, pp. 5763–5774, Dec.
2007.
[22] D. Yue, Q.-L. Han, and C. Peng, “State feedback controller design of
the networked control systems,” IEEE Trans. Circuits Syst.-II:Express
Briefs
, vol. 51, no. 11, pp. 640–644, Nov. 2004.
[23] D. Yue, Q.-L. Han, and J. Lam, “Network-based robust
H control of
systems with uncertainty,” Automatica, vol. 41, no. 6, pp. 999–1007,
Jun. 2005.
[24] X.-F. Jiang, Q.-L. Han, S.-R. Liu, and A.-K. Xue, “A new
H stabi-
lization criterion for networked control systems,” IEEE Trans. Autom.
Control
, vol. 53, no. 4, pp. 1025–1032, May 2008.
[25] B. Tang, G.-P. Liu, and W.-H. Gui, “Improvement of state feedback
controller design for networked control systems,” IEEE Trans. Circuits
Syst.-II: Express Briefs
, vol. 55, no. 5, pp. 464–468, May 2008.
[26] H.-G. Zhang, J. Yang, and C.-Y. Su, “T-S fuzzy-model-based robust
H design for networked control systems with uncertainties,” IEEE
Trans. Ind. Inf.
, vol. 3, no. 4, pp. 289–301, Nov. 2007.
[27] M. S. Mahmoud, “Robust
H control of discrete systems with uncer-
tain parameters and unknown delays,” Automatica, vol. 36, no. 4, pp.
627–635, Apr. 2000.
[28] G.-M. Xie and L. Wang, “Stabilization of networked control systems
with time-varying network-induced delay,” in Proc. 43rd IEEE Conf.
Decision Control
, Atlantis, Paradise Island, Bahamas, Dec. 2004, pp.
3551–3556.
Congzhi Huang
was born in 1982. He received the
B.E. degree in automation from the Department of
Automation, North China Electric Power University,
Beijing, China, in 2005, and the M.S. degree in pat-
tern recognition and intelligent systems. He is cur-
rently working towards the Ph.D. degree in control
theory and control engineering at the Department of
Automation, North China Electric Power University.
His main research interests include networked cas-
cade control system, control theory and applications.
Yan Bai
was born in 1954. He received the B.E. de-
gree in chemical automation and meters from Dalian
Institute of Technology (now Dalian University
of Technology), Dalian, Liaoning, China, in 1982
and the Ph.D. degree in control theory and control
engineering from Northeast University, Shenyang,
Liaoning, China, in 1998.
Currently, he is a Professor in the Department of
Automation, North China Electric Power University.
He had been a Visiting Scholar at Kyoto University,
Japan, from 1992 to 1993. His main research inter-
ests include distributed control systems, wireless sensor networks and intelli-
gent control of complex systems. He has been devoted in the research of dis-
tributed control systems and fieldbus control systems for over 20 years. He has
been an author or coauthor of more than 100 scientific papers as well as seven
monographs.
Prof. Bai is a Director of the Fieldbus Specialized Commission, China In-
strument Manufactures Association, a member of Editorial Board of Chinese
Chemical Automation and Instrument, and specially invited as a reviewer of the
Proceedings of the Chinese Society for Electric Engineering
.
Xiangjie Liu
was born in 1966. He received the
Ph.D. degree in electrical and electronic engineering
from the Research Center of Automation, North-
eastern University, Shenyang, Liaoning, China, in
1997.
He subsequently held a Postdoctoral position
with the China Electric Power Research Institute
(CEPRI), Beijing, China, until 1999. He has been an
Associate Professor at CEPRI since 1999. He was
a Research Associate with the University of Hong
Kong. He joined the National University of Mexico
in 2001, where he was a Professor with the Research Center of Applied Science
and Technology Development. He is now a Professor with the Department of
Automation, North China Electric Power University, Beijing, China. His current
research areas include fuzzy control, neural networks, adaptive and predictive
control, intelligent control theory and its application in industrial process.
Prof. Liu is a member of Technical Committee on Process Control of the
Chinese Association of Automation, a member of the Editorial Board of the
Chinese Journal of Control Engineering
and the Chinese Journal of Electric
Power Automation Equipment
.
Authorized licensed use limited to: IEEE Xplore. Downloaded on May 13,2010 at 11:47:23 UTC from IEEE Xplore. Restrictions apply.
Wyszukiwarka
Podobne podstrony:
Design the Remote Control System With the Time Delay Estimator and the Adaptive Smith Predictor ge2
Model for energy conversion in renewable energy system with hydrogen storage
Advanced Methods for Development of Wind turbine models for control designe
Baumann Destabilization of velocity feedback controllers with stroke limited inertial actuators
practical aspects of feedback control
Antczak, Tadeusz; Pitea, Ariana Proper efficiency and duality for a new class of nonconvex multitim
Development Of Wind Power Control System For Six Phase Permanent Magnet Synchronous Generators
A Technique for Removing an Important Class of Trojan Horses from High Order Languages
Guidelines for Persons and Organizations Providing Support for Victims of Forced Migration
Electrochemical properties for Journal of Polymer Science
69 991 1002 Formation of Alumina Layer on Aluminium Containing Steels for Prevention of
Development of a highthroughput yeast based assay for detection of metabolically activated genotoxin
Intertrochanteric osteotomy in young adults for sequelae of Legg Calvé Perthes’ disease—a long term
Core Wall Survey Control System for High Rise Buildings
Piórkowska K. Cohesion as the dimension of network and its determianants
Microprocessor Control System for PWM IGBT Inverter Feeding Three Phase Induction Motor
Module 3 of 5 (Networking Protocol Suites)
E-Inclusion and the Hopes for Humanisation of e-Society, Media w edukacji, media w edukacji 2
więcej podobnych podstron